54_轿车双横臂前悬架的有限元动力学分析_李志远
基于牛顿-辛普森迭代法的双横臂独立悬架运动分析
基于牛顿-辛普森迭代法的双横臂独立悬架运动分析第一章引言双横臂独立悬架是一种常见的车辆悬挂结构,在现代汽车中得到了广泛应用。
它能够提供更为舒适、稳定和安全的行车体验,同时也能够提高车辆的操控性能和路面附着力。
因此,对于双横臂独立悬架的运动特性的研究对于优化车辆性能和提高驾驶体验具有重要意义。
本文基于牛顿-辛普森迭代法探讨了双横臂独立悬架的运动特性,旨在进一步了解该悬架的运动规律和特点,为车辆动力学仿真和悬架优化设计提供理论支持。
第二章算法原理牛顿-辛普森迭代法是解决非线性方程组的一种经典数值方法,其核心思想是将非线性问题转化为一系列线性问题,并采用数值积分的方法求解。
对于双横臂独立悬架运动问题,我们可以将其转化为求解关于悬架各个节点位移和速度的方程组,并以时间为离散变量采用数值方法求解。
具体来说,我们可以采用牛顿-辛普森迭代法求解双横臂独立悬架的运动学方程和动力学方程。
对于运动学方程,我们可以根据悬架结构和运动学原理得到各节点位置和速度的函数表达式,然后采用数值方法逐步迭代求解。
对于动力学方程,我们需要考虑悬架与地面之间的接触力、悬架各部件之间的力学作用和阻尼作用,可以采用经典的牛顿-欧拉方程或拉格朗日方程进行建模,并通过数值方法求解。
通过采用牛顿-辛普森迭代法解决双横臂独立悬架的运动问题,可以避免复杂的微分方程求解和浮点运算,同时求解速度较快,精度较高,适用于车辆动力学仿真中的实时运算。
第三章模型建立本文中,我们采用一款现代SUV车型的双横臂独立悬架作为研究对象,建立了悬架的三维CAD模型并进行了仿真分析。
根据悬架结构和运动学原理,我们可以得到悬架各节点位置和速度的函数表达式,进而得到悬架的运动学方程和动力学方程。
对于悬架的动力学方程,我们采用拉格朗日动力学方法进行建模,将悬架各部件的质量、刚度、阻尼等参数考虑进去,并根据运动学方程和拉格朗日方程构建了一个涵盖悬架多自由度运动的非线性微分方程组。
汽车双横臂独立悬架动力学建模与优化设计

9000.0 8000.0 7000.0 6000.0 5000.0 4000.0
-50.0
2.0
1.0
initial_left_hub_forces
-25.0
0.0
25.0
50.0
wheel travel(mm)
initial_wheel_travel_base
0.0
-1.0
-50.0
-25.0
0.0
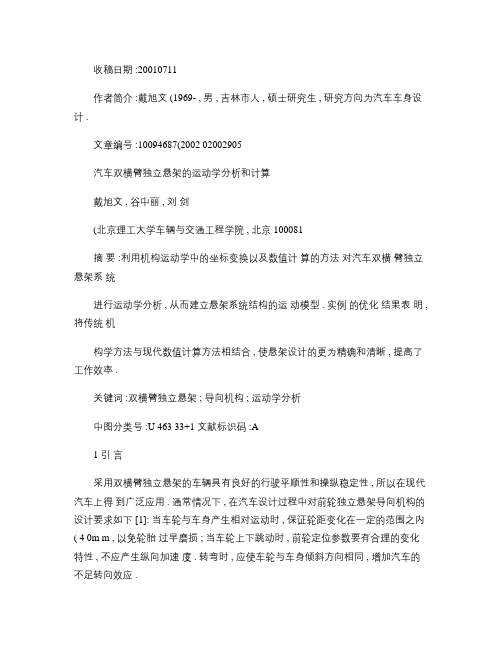
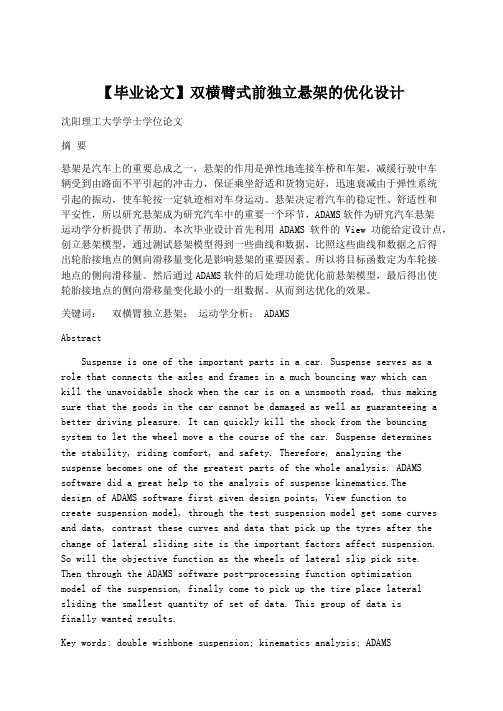
通 过 模 拟 数 据 分 析 之 后, 依 照 车 辆 前 后 悬 架 的 偏 差 比 例, 确 定 前 悬 架 的 线 性 段 刚 性 程 度 为 33N/mm, 具 体 的 取 值 范 围 在 ±10mm 之间。从图 2 当中的数据分析可以看 出,前侧中心的高度在设计负载的状态下为 79mm,保持在合理的设计范围之内,侧倾的 中心高度直接影响到了汽车悬架系统的稳定 性,侧倾中心越高,车轮之间的间距变化也 就越大,则对轮胎的磨损越严重。同时侧倾 中心越高,在弯道过程中越容易翻车。因此, 在进行悬架设计工作中,必须要对这些问题
MANUFACTURING AND PROCESS | 制造与工艺
时代汽车
汽车双横臂独立悬架动力学建模与优化设计
何名基 方盛车桥(柳州)有限公司 广西柳州市 545006
摘 要:随着汽车行业的发展,对汽车的操控稳定性和整车舒适性要求是越来越高。目前越来越多商用车使用了独 立悬架系统,提高整车的操控稳定性和舒适性。基于此。本文结合工作内容,重点针对汽车双横臂独立悬 架系统展开了分析和研究,并且提出了相应的优化设计要点,以供参考。
本文以目前在商用车上日益流行的双横 臂独立悬架系统为模型,进行优化分析,并 提出了相应的优化设计方法。在双横臂独立 悬架系统设计过程中,合理的设计上下摆臂 的长度和角度的,可有效提高车轮的定位精 度、有效降低侧倾中心高度和中心高度,使 得整车在弯路当中的表现更加稳定,有效提 高整车行驶安全性。
54_轿车双横臂前悬架的有限元动力学分析_李志远
轿车双横臂前悬架的有限元动力学分析李志远1陈潇凯1宋康1林逸2(1 北京理工大学机械与车辆学院,北京 100081、2 北京汽车研究总院,北京 100021)摘要:以某轿车双横臂前悬架为研究对象,利用Altair公司的HyperWorks软件进行有限元模型的建立和动力学仿真分析。
在悬架模型的建立过程中,采用限制自由度的方法,模拟铰链的相对运动,同时考虑了悬架系统中衬套元件的影响,使动力学分析结果更加接近实际情况;并对悬架模型的模态以及在道路激励下的动态响应进行了仿真分析。
结果表明,应用该有限元模型进行计算可以比较准确得出悬架结构的动力学特性,对悬架设计有重要意义。
关键词:汽车悬架 HyperWorks 有限元动态响应0 引言悬架的主要功能是传递作用在车轮和车架之间的力和力扭,并且缓冲由不平路面传给车架或车身的冲击力,并衰减由此引起的震动,以保证汽车能平顺地行驶。
[1]双横臂悬架具有侧倾中心高度低,横向刚度大等优点,多用于轿车前悬架。
目前,有限元方法在悬架的静力学分析中的研究比较成熟而且在实际生产过程中得到广泛应用。
由于悬架结构在实际工作中的受力状况比较复杂,对其进行有限元静力学分析可以得到在各种典型工况下其结构中的应力分布规律和变形情况,找出结构中应力值较大的关键点,从而进行结构优化,提高行驶安全性,延长使用寿命。
[2]随着汽车工业的不断进步,人们对汽车舒适性的要求逐渐提高,振动和噪声问题成为人们关注的重要指标之一。
作为影响汽车舒适性的重要结构,悬架的动态特性显得尤为重要。
悬架的有限元动力学分析可以找出悬架结构潜在的振动问题,预估悬架在路面激励作用下的响应, 为深入研究其振动、疲劳、噪声等实际问题并进行动力修改提供了依据,对汽车舒适性、平顺性、行驶安全性有重要的意义。
1 悬架系统有限元模型的建立双横臂悬架由转向节、下控制臂、上控制臂、减振器,螺旋弹簧等结构组成。
为了减少计算量并充分利用各类单元的优点,提高计算的精确度,根据有限元网格划分的相关准则将前悬架结构分成下列各子单元分别建模:(1)转向节结构(实体单元);(2)下控制臂(实体单元);- 1 -(3)上控制臂(面单元);(4)减振器筒壁(面单元);(5)减振器活塞及支架(实体单元);(6)连接上控制臂与车身的部件(实体单元)。
浅谈汽车悬架控制臂有限元分析与结构优化
车辆工程技术39车辆技术0 概述汽车悬架控制臂作为汽车悬架系统的重要组成部件,其质量的好坏直接影响汽车行驶的安全性。
汽车悬架控制臂在实际工作状况下,经常会受到大小和方向不同的扭转力作用,随着受力次数的增加,其某些部位会出现疲劳破坏,而汽车悬架控制臂的强度及疲劳特性影响着汽车系统的可靠性。
因此汽车悬架控制臂的疲劳寿命是设计中必须要考虑的一个重要因素。
1 汽车悬架控制臂三维模型建立(1)用三维激光扫描仪对汽车悬架控制臂进行扫描,获取此零件的点云数据。
(2)对获得的点云数据进行处理及偏差分析,直到获得高精度的点云数据。
(3)将获得的点云数据导入CATIA 软件中,建立汽车悬架控制臂的三维模型,具体汽车悬架控制臂逆向三维建模过程流程如图1所示。
浅谈汽车悬架控制臂有限元分析与结构优化王 刚(长城汽车股份有限公司保定技术研发分公司,河北 保定 071000)摘 要:控制臂是汽车悬架系统的重要安全件和功能件。
本文主要结合汽车悬架控制臂的实际受载状况,利用ANSYS 疲劳分析模块对其加载要求和结构设计优化。
关键词:汽车悬架控制臂;ANSYS;有限元分析图12 汽车悬架控制臂载荷分析(1)在对汽车悬架控制臂构件进行有限元疲劳强度分析时,通常要根据构件的实际情况定义边界条件,包括施加的载荷和施加的固定约束。
对汽车悬架控制臂进行结构设计时,定义悬架控制臂在分别受拉、压达到破坏时所能承受的最大载荷为悬架控制臂的拉溃力和压溃力。
(2)一般在进行悬架控制臂结构设计时,需要根据整车行驶工况,对整车进行动力学分析或者试验测试,从而计算出或试验测出控制臂所能承受的拉溃力和压溃力。
(3)在汽车行驶的过程中,汽车悬架控制臂始终绕着与副车架连接的内侧铰点摆动,是一个运动件。
汽车悬架控制臂与衬套之间、衬套与螺栓之间为过盈配合,衬套通过芯部的螺栓固定在副车架上。
汽车悬架控制臂中衬套绕螺栓的设计扭转刚度、汽车悬架控制臂的长度、车轮上跳的最大高度,则能确定衬套受到的扭矩的大小为,汽车悬架控制臂受到同样大小的反扭矩作用,但这个扭矩与实际工况下内侧铰点其它各平动方向的载荷相比是个很小的值,故对汽车悬架控制臂受力分析时可以认为控制臂的转动自由度不受限制。
汽车双横臂独立悬架的运动学分析和计算_戴旭文
收稿日期 :20010711作者简介 :戴旭文 (1969- , 男 , 吉林市人 , 硕士研究生 , 研究方向为汽车车身设计 .文章编号 :10094687(2002 02002905汽车双横臂独立悬架的运动学分析和计算戴旭文 , 谷中丽 , 刘剑(北京理工大学车辆与交通工程学院 , 北京 100081摘要 :利用机构运动学中的坐标变换以及数值计算的方法对汽车双横臂独立悬架系统进行运动学分析 , 从而建立悬架系统结构的运动模型 . 实例的优化结果表明 , 将传统机构学方法与现代数值计算方法相结合 , 使悬架设计的更为精确和清晰 , 提高了工作效率 .关键词 :双横臂独立悬架 ; 导向机构 ; 运动学分析中图分类号 :U 463 33+1 文献标识码 :A1 引言采用双横臂独立悬架的车辆具有良好的行驶平顺性和操纵稳定性 , 所以在现代汽车上得到广泛应用 . 通常情况下 , 在汽车设计过程中对前轮独立悬架导向机构的设计要求如下 [1]: 当车轮与车身产生相对运动时 , 保证轮距变化在一定的范围之内( 4 0m m , 以免轮胎过早磨损 ; 当车轮上下跳动时 , 前轮定位参数要有合理的变化特性 , 不应产生纵向加速度 . 转弯时 , 应使车轮与车身倾斜方向相同 , 增加汽车的不足转向效应 .双横臂独立悬架的布置是空间的 , 机构的空间运动分析过程比较复杂 , 计算量很大 . 传统设计一般采用经验设计、查表法以及作图等方法 , 设计虽然可以基本满足要求 , 但精度和效率不高 . 作者建立了悬架机构的运动模型 , 简化了运动分析过程 ; 数值计算模型的建立和计算机的使用 , 减轻了手工计算量 , 提高工作效率 .2 双横臂独立悬架的导向机构运动学分析典型的双横臂独立悬架导向机构如图 1所示 . 为了简化分析 , 图中略去了转向节臂 . A , D 分别为上、下横臂的回转中心点 , 主轴销通过 B , C 两个球面副与上下横臂相连接 . 1、 2、 3、 4杆组成的空间机构 , 是由 A , D 两个转动副与车身相连组成的一个典型 RSSR 闭环空间机构 .2 1 系统的上横臂输入 2与下横臂输出 1按照 Denavit Hartenberg 坐标系的规定 [2], 取坐标系如图 1. k 1, k 4轴分别与转动副的轴线重合 , k 2与 k 1平行 ( 2=0 且通过球面副 B 的中心 , k 3轴通过主销球头的中心 . 另外取两个回转轴的公垂线为 i 1, 通过球心 B 垂直于 k 1与直线 i 2.2002年第 2期车辆与动力技术V ehicle &Pow er T echnolog y 总第 86期图 1 双横臂独立悬架导向机构简图 DC ; BC 主轴销 ; A B ; JQ 车轮轴 ; A , D 转动副 ; B , C ; Q ; G 机构的位姿方程 :E k 2E i 2E 23E 34E k 1E i 1=I, (1其中 E 12, E 23, E 34, E 41为欧拉变换 , 分别为 1, 2, 1, 2的函数 ; I 为单位阵 .由于 2=0, 从而 E i 2=I , 式 (1 简化为 :E k 2E 23E 34E k 1E i 1=I , (2根据机构运动学 [2]可知 :P = m j=1(h j i j +s j k j =h 1i 1+s 1k 1+h 2i 2+l k 3+h 4i 4-s 4k 4=0, (3参数代入、化简可得 :A 1sin 1+A 2cos 1+A 3=0,(4 其中 A 1=s 1h 4sin 1-h 2h 4sin 2cos 1, A 2=h 1h 4+h 2h 4cos 2,A 3=2(s 24+h 21+s 21+h 22+h 24-l 2 -s 4s 1cos 1+h 1h 2cos 2-s 4h 2sin 1sin 2. 进一步求解得到 :1=2arctan A 1 A 1+A 2-A 3A 2-A 3. (5式 (5 描述了上横臂的角输入 2与相应的下横臂的角输出 1之间存在的确定的函数关系 , 通过式 (5 可以对整个导向机构进行运动学分析、计算 .2 2 主销两球头坐标的求解由机构运动学原理可知 , 设有某一任意轴方向向量为 : =( 1, 2, 3 , 那么绕回转的变换矩阵为 E , 则主销两端 B , C 两点的坐标为 :B =E ( 1-( 2-(630 车辆与动力技术 2002年其中 01, 02, B 0, C 0是初始值 . B , C 的坐标求出后 , 设 =|BJ |/|BC |, 车轮回转中心点 J 的坐标 J =(1- B + C. J 点是悬架导向机构和车轮的理论连接点 , 它的确定是进一步分析车轮运动的基础 . 3 汽车车轮部分的运动分析3 1 车轮中心点 Q 的坐标求解第一步先求解出转向节臂的回转中心 H 点的坐标 .将 B -C -J -Q -G 从图 1中分离出来 , 见图 2. H 点的运动具有以下的约束条件 :图 2 车轮及转向节 IH 转向拉杆 ; JH 转向节臂 ; H , I 球副 |HJ |=con st 1|HB |=con st 2|HI |=con st 3,(7 其中 con st 1, con st 2, con st 3可以根据系统的初始条件获得 . B , I , J 点的坐标均已在上面求出 ,所以式 (7 是三元二次方程组 . 利用数值解法 [3]解得 H 点的坐标 :(H X , H Y , H Z .同理 , 由于 Q 点到 B , C, H 的距离不变 ,所以存在下列方程组 :|QH |=con st 4|QB |=con st 5|QC |=con st ,(8 其中 con st 4, con st 5, con st 6可以根据系统的初始条件获得 . 解之得 Q 点的坐标 :(Q X , Q Y , Q Z .3 2 车轮接地点 G 的坐标求解设车轮平面的方向向量 n =(a , b, c T , 根据汽车结构的特点 , 车轮平面的法线方向向量与 QJ 轴的方向向量相同 , 且 Q 点位于车轮平面内 , 由此可以设车轮平面的方程为 :aX +b Y +cZ +d =0; 另外 G 点位于车轮的圆周上 , :aX +bY +cZ +d =0(X -Q X 2+(Y -Q Y 2+(Z -Q Z 2=R 20, (9 其中 R 0为车轮半径 . G 点是这个圆周上 Z 坐标值最小的一点 , 可以利用计算机采用优化解法求得 G 点的坐标 . 4 车轮定位参数的确定[4]31 第 2期戴旭文等 :汽车双横臂独立悬架的运动学分析和计算车轮的外倾角 L Y =arctanQ Y -G Y Q Z -G ; 车轮的前束角 QS =arctan Q X -J X Q Y -J Y ; 轮距的变化量 =2X -G X 0 +(G Y -G Y 0 +(G Z -G Z 0 ; 车轮的纵向加速度 a =G X -G X 0G Z -G Z 0a Z. 汽车转向行驶时外侧车轮处于压缩行程 , 前束角减小 ; 内侧车轮处于复原行程 , 前束角增大 ; 车轮向汽车纵向中心转动 , 增加了不足转向量 . 从车轮的纵向位移变化幅度可以计算出车轮在跳动时的附加纵向加速度 .汽车行驶过程中 , 车轮上下跳运时 , 只有主销及车轮的定位参数变化在所要求的范围内 , 且车轮运动与导向机构的运动彼此协调 , 才能保证汽车行驶过程中具有良好的操纵稳定性和平顺性 .5 计算实例如图 1所示的双横臂系统 , 建立固定在汽车车身上的直角坐标系 , 原点位于 A 点 . k 1和 k 2轴在 X OZ 平面中与 X 轴的夹角分别为 -1 5~1 5 , 6 . 初始时刻 A , B , C, D, J , Q, H , I 点的坐标 (mm 为 :A (0, 0, 0 ,B (3, 281, -21 44 ,C (7, 317, -295 ,D (10, -121, -238 , H (154, 256, -327 , I (74, -151, -264 ,Q (8 5, 419, -241 ,J (5 8, 306, 315 5. 将上述坐标转化为 Denav it-Hartenberg 坐标 , 计算车轮的定位参数 . 当车轮上下跳动的范围为 50mm 时 :前轮外倾角的变化范围 :-0 4~2 7 ;车轮前束角的变化范围 :1~1 57 ;车轮横向滑移变化范围 :-7 4~6 2mm ;主销内倾角的变化范围 :7 5~9 ;主销后倾角的变化范围 :0 65~1 ;车轮的纵向加速度为 :0 076a Z .从上面的数据来看 , 此设计的指标不高 , 尤其是车轮的滑移特性很差 . 另外 , 车轮前束角和主销后倾角的变化范围有些大 , 总之这个设计方案不十分理想 .利用上述所建的模型对所选坐标 (mm 进行优化 , 得到 :A (0, 0, 0 ,B (5 6, 266, -74 ,C (12 7, 301 8, -345 ,D (59, -159, -286 ,H (201, 212, -277 , I (113 3, -199, -214 , Q (13 8, 469, -271 , J (43, 291, 298 . 优化后的设计方案 (车轮上下跳动 50m m 车轮定位参数如下 :前轮外倾角的变化范围 :0 34~1 73 ;车轮前束角的变化范围 :1 03~1 10 ; 2 32 车辆与动力技术 2002年主销内倾角的变化范围 :6 3~9 42 ;主销后倾角的变化范围 :1 34~1 84 ;车轮的纵向加速度为 :0 045a Z .从所得的数据来看 , 虽然主销内倾角的变化范围有所增加 , 但是其他指标都有了一定的改善 , 尤其是车轮滑移特性得到了明显的提高 . 综合比较 , 第二个方案比较理想 .6 结论本文所建立的运动模型适合于 RSSR 结构的各种车型双横臂独立悬架的结构参数设计 , 具有较高的设计精度 , 同时可以对各个参数进行定量及定性的分析 , 使设计者能够清楚地了解悬架的各种运动特性 .在具体的实用软件的使用中 , 只需设计输入约束条件即可对机构进行运动分析和优化设计 . 设计者只需要了解参数的实际含义 , 正确确定各个约束条件即可 . 由于计算机的使用 , 可以摆脱依靠试验和查表以及经验的设计方式 , 不但可以提高设计效率 , 同时还可以提高设计的准确性 .参考文献 :[1] 张洪欣 . 汽车设计 [M ]. 北京 :机械工业出版社 , 1989.[2] 谢存禧 , 郑时雄 , 林怡青 . 空间机构设计 [M]. 上海 :上海科学技术出版社 , 1996.[3] 丁丽娟 . 数值计算方法 [M]. 北京 :北京理工大学出版社 , 1997.[4] 毛明 , 张相麟 . 轮式车辆双横臂独立悬架的运动优化设计 . 汽车工程 [J]. 1997(3 :38-45.Kinematics Analysis and Calculation of the Double -WishboneIndependent Suspension of Wheeled -VehicleDAI Xu -w en, GU Zhong -li, LIU Jian(School of Vehicle and T r anspor tat ion Eng ineering, Beijing Institute of T echnology, Beijing 100081, China Abstract:The article adopts the methods of coordinate conversion and numerical calculation for the kinematics analysis and calculation and then creates a model for the optionization of a double-w ishbone suspension system of w heeled-vehicle. The result of the example indicates that the combination of traditional mechanism kinematics w ith modern numerical calculation can sim plify the calculations during design, and meanw hile make the process of design more concisely and clearly.Key words:double-w ishbone suspension; guide mechanism; kinematics analysis 33 第 2期戴旭文等 :汽车双横臂独立悬架的运动学分析和计算。
学术论文:【毕业论文】双横臂式前独立悬架的优化设计
【毕业论文】双横臂式前独立悬架的优化设计沈阳理工大学学士学位论文摘要悬架是汽车上的重要总成之一,悬架的作用是弹性地连接车桥和车架,减缓行驶中车辆受到由路面不平引起的冲击力,保证乘坐舒适和货物完好,迅速衰减由于弹性系统引起的振动,使车轮按一定轨迹相对车身运动。
悬架决定着汽车的稳定性、舒适性和平安性,所以研究悬架成为研究汽车中的重要一个环节,ADAMS软件为研究汽车悬架运动学分析提供了帮助。
本次毕业设计首先利用ADAMS软件的View功能给定设计点,创立悬架模型,通过测试悬架模型得到一些曲线和数据,比照这些曲线和数据之后得出轮胎接地点的侧向滑移量变化是影响悬架的重要因素。
所以将目标函数定为车轮接地点的侧向滑移量。
然后通过ADAMS软件的后处理功能优化前悬架模型,最后得出使轮胎接地点的侧向滑移量变化最小的一组数据。
从而到达优化的效果。
关键词:双横臂独立悬架;运动学分析; ADAMSAbstractSuspense is one of the important parts in a car. Suspense serves as a role that connects the axles and frames in a much bouncing way which cankill the unavoidable shock when the car is on a unsmooth road, thus making sure that the goods in the car cannot be damaged as well as guaranteeing a better driving pleasure. It can quickly kill the shock from the bouncing system to let the wheel move a the course of the car. Suspense determines the stability, riding comfort, and safety. Therefore, analyzing the suspense becomes one of the greatest parts of the whole analysis. ADAMS software did a great help to the analysis of suspense kinematics.Thedesign of ADAMS software first given design points, View function tocreate suspension model, through the test suspension model get some curves and data, contrast these curves and data that pick up the tyres after the change of lateral sliding site is the important factors affect suspension. So will the objective function as the wheels of lateral slip pick site. Then through the ADAMS software post-processing function optimizationmodel of the suspension, finally come to pick up the tire place lateral sliding the smallest quantity of set of data. This group of data isfinally wanted results.Key words: double wishbone suspension; kinematics analysis; ADAMS目录TOC \o "1-3" \h \z \u l "_Toc107663939" 1 绪论1l "_Toc107663940" 1.1课题引言1l "_Toc107663941" 1.2 汽车悬架简介1l "_Toc107663942" 1.3 汽车悬架分类1.4 ADAMS简介1.5 本文研究的内容2l "_Toc107663943" 2前悬架模型的建立3l "_Toc107663944" 2.1 创立新模型3l "_Toc107663945" 2.2 添加约束42.3本章小结........................................................................ .. (6)l "_Toc107663948" 3前悬架模型运动学分析7l "_Toc107663949" 3.1 添加驱动7l "_Toc107663950" 3.2测量主销内倾角7l "_Toc107663951" 3.3测量主销后倾角10l "_Toc107663952" 3.4测量前轮外倾角12l "_Toc107663953" 3.5测量前轮前束倾角14l "_Toc107663954" 3.6测量车轮接地点侧向滑移量17l "_Toc107663955" 3.7本章小结19l "_Toc107663974" 4细化前悬架模型21l "_Toc107663975" 4.1 创立设计变量21l "_Toc107663976" 4.2将设计点参数化21l "_Toc107663977" 4.3将物体参数化254.4本章小结 (25)l "_Toc107663982" 5定制界面32l "_Toc107663983" 5.1 创立修改参数对话窗 (3)2l "_Toc107663984" 5.2 修改菜单栏........................................................................ .. (36)l "_Toc107663984" 5.3 本章小结........................................................................ .. (37)6 优化前悬架模型........................................................................ . (26)6.1 定义目标函数 (26)6.2 优化模型 (26)6.3 观察优化结果 (27)6.4 本章小结 (31)l "_Toc107663988" 本文总结40l "_Toc107663989" 致谢41l "_Toc107663990" 参考文献42l "_Toc107663991" 附录A 汉语原文43附录B 英文翻译 l "_Toc107663991" 521 绪论1.1 课题引言在马车出现的时候,为了乘坐更舒适,人类就开始对马车的悬架进行孜孜不倦的探索,随着社会的日益进步和科学技术的不断开展,汽车开始普及,人们对汽车平顺性、稳定性、操控性及其舒适性也有了更高要求。
双横臂独立悬挂主要零件有限元分析研究

( 中国北 方车辆研究所 ,北京 10 7 ) 00 2
摘
要: 在运用 A A D MS软件对 双横臂独立悬挂进行极 限工况动力学仿真的基 础上 ,运用 A A U B Q S软件对其 主要
承载零件下横臂与球头销进行有限元分 析 ,并就其结果 对零 件进行 了分析 、改 进与试验 对 比.此方法 可作 为此
修 稿 E期 : 0 9— 6— 8 t 2 0 0 0
作者简介:彭余( 9 1一) 18 ,男 ,工程师 ,主要研究方 向:车辆设计与仿 真
第 3期
彭友余 等 :双横臂独立悬 挂主要零件有限元分析研究
内臂 建立耦 合 约束 ; 3 )载 荷施 加在 球 头销 球 心 点 与 弹簧 底 座 中心 点 ,其大 小 由动力 学仿 真结果 得 到.约 束方 式为 在
o i esf aeo A A U .A crigt teF A rsl ,w m rv eep r ei .I Sa dwt t ot r f B Q S codn E u s ei poet s at d s n t hh w oh e t h s g
Absr c : Ut ii g t o wa e o ta t i zn hes f r fADAMS, t e u t t o d c s fs o tl n r ls s e so ssmu l t h l mael a a eo h r—o ga n u p n i n i i — i ltd a d n lz d Ba e n h e ut fdy a c ,t e te gh o o r a m a d ph rc l p n, a e n a a y e . s d o te r s l o n mi s h sr n t f lwe r s n s e a i i wh c r h rma y p rso h r-o g a n u p n in,i a c lt d b a so i ie Elme tMe h ih a e te p i r a fs ot ln F ls s e so t s c u ae y me n fF n t e n t — l
汽车双横臂式独立悬架机构运动特性分析
W AN G Q i2dong1, ZHAO H an1, L I Yan1, ZHU Shao 2chun2
( 1. Schoo l of M echan ical and ቤተ መጻሕፍቲ ባይዱ u tom ob ile Eng ineering, H efei U n iversity of T echno logy, H efei 230009, Ch ina; 2. Fu T ian com p any, Beijing A u tom ob ile and M o to rcycle Group , Beijing 100083, Ch ina)
1068
合肥工业大学学报 (自然科学版) 第 24 卷
(C z - A 1z ) (C y - A 1y ) )A 1y ) + (A 1z - H z ) H y (A 1z + (F z -
A 2z ) (F y - A 2y )A 2y - (C z - A 1z ) (C y - A 1y )A 1y -
轴线 L 1 的方向余弦[4 ] 为
U 1 = [U 1x U 1y U 1z ]T = [ co sΥ1co sΗ1 co sΥ1 sinΗ1 - sinΥ1 ]T 轴线L 2 的方向余弦为
U 2 = [U 2x U 2y U 2z ]T = [ co sΥ2co sΗ2 co sΥ2 sinΗ2 - sinΥ2 ]T
(1)
主销内倾角 Β
tanΒ = (C y - F y ) (C z - F z )
(2)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
轿车双横臂前悬架的有限元动力学分析李志远1陈潇凯1宋康1林逸2(1 北京理工大学机械与车辆学院,北京 100081、2 北京汽车研究总院,北京 100021)摘要:以某轿车双横臂前悬架为研究对象,利用Altair公司的HyperWorks软件进行有限元模型的建立和动力学仿真分析。
在悬架模型的建立过程中,采用限制自由度的方法,模拟铰链的相对运动,同时考虑了悬架系统中衬套元件的影响,使动力学分析结果更加接近实际情况;并对悬架模型的模态以及在道路激励下的动态响应进行了仿真分析。
结果表明,应用该有限元模型进行计算可以比较准确得出悬架结构的动力学特性,对悬架设计有重要意义。
关键词:汽车悬架 HyperWorks 有限元动态响应0 引言悬架的主要功能是传递作用在车轮和车架之间的力和力扭,并且缓冲由不平路面传给车架或车身的冲击力,并衰减由此引起的震动,以保证汽车能平顺地行驶。
[1]双横臂悬架具有侧倾中心高度低,横向刚度大等优点,多用于轿车前悬架。
目前,有限元方法在悬架的静力学分析中的研究比较成熟而且在实际生产过程中得到广泛应用。
由于悬架结构在实际工作中的受力状况比较复杂,对其进行有限元静力学分析可以得到在各种典型工况下其结构中的应力分布规律和变形情况,找出结构中应力值较大的关键点,从而进行结构优化,提高行驶安全性,延长使用寿命。
[2]随着汽车工业的不断进步,人们对汽车舒适性的要求逐渐提高,振动和噪声问题成为人们关注的重要指标之一。
作为影响汽车舒适性的重要结构,悬架的动态特性显得尤为重要。
悬架的有限元动力学分析可以找出悬架结构潜在的振动问题,预估悬架在路面激励作用下的响应, 为深入研究其振动、疲劳、噪声等实际问题并进行动力修改提供了依据,对汽车舒适性、平顺性、行驶安全性有重要的意义。
1 悬架系统有限元模型的建立双横臂悬架由转向节、下控制臂、上控制臂、减振器,螺旋弹簧等结构组成。
为了减少计算量并充分利用各类单元的优点,提高计算的精确度,根据有限元网格划分的相关准则将前悬架结构分成下列各子单元分别建模:(1)转向节结构(实体单元);(2)下控制臂(实体单元);- 1 -(3)上控制臂(面单元);(4)减振器筒壁(面单元);(5)减振器活塞及支架(实体单元);(6)连接上控制臂与车身的部件(实体单元)。
最终前悬架的有限元模型如图1所示。
整个模型节点总数为35272,单元数为总数为24498。
悬架有限元模型在HyperMesh中建立,后处理在HyperView中。
图1 悬架的有限元模型示意图图2 铰链连接有限元模型示意图悬架系统的部分零件是通过运动副的作用来传递载荷的。
运动副载荷传递途径复杂,有限元建模时将运动副简化为铰链,内部摩擦与间隙不计。
转向节与上控制臂的连接(图1中A处)、转向节与下控制臂的连接(图1中D处)均为球铰链连接。
一般的有限元软件很难精确定义这种连接关系,故需要采用限制自由度的方法来模拟。
球铰链连接实际上就是限制某一点三个方向的平动自由度,同时释放其三个方向转动自由度的一种约束关系。
具体实现方式如图2所示,首先利用多点约束的方法将球铰座和球铰销刚性化。
放射网状结构为刚性球铰座,OJ与OK为刚性球铰销。
J和K为刚性球铰座的主节点,又是刚性球铰销的从节点。
在球铰链的转动中心O点处定义一个长度为零的刚性单元,连接两刚性球铰销。
限制该单元三个方向的平动自由度,释放其三个方向的转动自由度,即实现了球铰链连接。
在减振器支架与下控制臂的旋转副铰链连接(图1中E处)的处理上采用相似的方法,区别是只释放铰链的一个转动自由度,因此需要建立局部坐标系,方便控制旋转副铰链的转动方向。
悬架与副车架(图1中F处)是通过衬套元件连接的。
衬套元件具有六个方向的刚度和阻尼,Nastran中的BUSH弹性单元可精确模拟这种结构,定义六个方向的刚度和阻尼。
实现方式与球铰链相似,同样是先将转动销和转动轴刚性化,在转动中心点处定义一个长度为零的BUSH单元,连接悬架结构和副车架。
此处需要建立局部坐标系,便于定义轴套六个方向的参数。
- 2 -减振器与弹簧结构分别简化为一个阻尼单元和一个弹性单元,分别定义其阻尼值和刚度值。
由于轮胎受力比较复杂且其有限元分析涉及各种非线性,为此本模型不考虑轮胎的作用。
车轮简化为集中质量单元。
载荷直接作用于轮毂与转向节的装配点(图1中B处)。
模型的约束如下:1)限制I点处的三个平动自由度和三个转动自由度;2)限制转向节和转向横拉杆的连接点C处的y向平动自由度;3)限制下控制臂衬套内节点F处的三个方向的平动自由度。
2 悬架结构的模态计算分析模态是结构的固有振动特性,每一个模态具有特定的固有频率、阻尼比和模态振型。
模态计算分析从结构特性与材料特性等原始参数开始,采用有限元法求解特征值,确定模态参数。
模态分析是结构动态设计及设备故障诊断的一种重要的方法。
本文使用Lanczos法求解结构模态。
Lanczos法直接根据载荷空间的分布模式按一定的规律生成一组向量,能够显著提高计算效率,比较适合求解具有大量离散自由度结构的较多阶特征值问题。
由于高阶振型对结构的贡献较小,所以只计算悬架结构的前10阶模态频率即可达到足够的精度,计算结果如表1所示。
表1 悬架模型的模态计算结果阶次 1 2 3 4 5 6 7 8 9 10 模态频率/Hz 1.57 33.5 71.493.7148.2165.1199.7213.4 227.7 262.9获得了悬架的各阶模态即可通过线性组合得出悬架在任意激励下的响应。
通过计算悬架结构在易受影响的频率范围内各阶主要模态的特性,预言悬架结构在此频段内各种振源作用下的实际振动响应,指导后续的道路激励下的动态响应分析。
1)动态响应分析中应关注悬架各阶模态频率附近的响应情况,尤其在路面激励的频率范围附近(0.33—28.3Hz),前两阶模态频率附近可能会出现较大的振动峰值。
2)悬架与车身、副车架等结构直接相连,在设计分析阶段应注意使车身、副车架的模态频率与悬架结构模态频率错开,避免产生共振。
3 道路激励下悬架系统的动态响应3.1 模型的建立为方便设置响应点,在左侧悬架模型的基础上建立副车架模型,如图3所示。
取副车架左侧靠近车身地板一点作为响应点(图3中S点)。
模型节点总数为46582,单元总数为35174。
模型约束如下1)限制悬架与车身连接点I处的六个方向的自由度;2)限制转向节和转向横拉杆的连接点C处的y向平动自由度;3)限制副车架与车身连接点P、Q两点六个方向的- 3 -自由度;4)限制副车架与右侧悬架的连接点R处的六个方向的自由度。
3.2 频响传递函数的计算图3 悬架与副车架的有限元模型示意图由于路面激励主要为垂向输入,人们也更关心车内垂向振动情况,所以为方便计算分析,我们只考虑模型的Z向输入和Z向响应情况。
在轮毂与转向节装配点(图3中B点处)施加Z 向的力信号,频率范围内幅值恒为1N。
观察副车架的振动情况,计算S点处Z方向的加速度响应,即相当于计算模型从B点Z向到S点Z向的传递函数,计算结果如图4所示。
图4 悬架结构的频响传递函数曲线由曲线可以看出,在0—20Hz的低频段,曲线较为平缓,只有在2Hz出现小的峰值;20—50Hz的中频段中,在24Hz左右出现较大的峰值;在50—100Hz的高频段,结构的响应维持在一个较高的水平,在69Hz出现峰值,并从76Hz开始出现逐步增大的趋势。
峰值出现的频率值与悬架的模态频率比较吻合。
- 4 -3.3 路面激励下的响应计算悬架所受的随机激励主要是路面的凹凸不平引起的位移激励。
作为车辆振动输入的路面不平度,主要采用路面功率谱密度描述其统计特性。
[3]本文采用ADAMS软件仿真计算车辆在B级路径以80km/h车速行驶工况下前悬架转向节与轮毂连接点处Z方向的力的时域响应信号,经过傅立叶变换获得频域信号。
有限元模型以此信号作为输入,作用在模型B点处,计算得出的响应点Z方向的加速度响应曲线,如图5所示。
图5 B级路面80km/h工况输入下的加速响应曲线在常用车速下,路面激励的频率范围f =0. 33~28. 3Hz.这个频率范围能把悬挂质量部分的固有频率和非悬挂质量部分的固有频率有效地覆盖在内.因此,振动响应的较大峰值都出现在这个范围之内。
1)加速度响应的最大峰值在1Hz,幅值为0.18m/s2。
加速度响应的第二大峰值在24Hz,幅值为0.08m/s2。
2)在69Hz与98Hz左右出现较小峰值,幅值为0.035m/s2。
3)结果与模态分析和传递函数的频响分析结果基本一致。
4 结论本文以某轿车双横臂前悬架为研究对象,详细阐述了利用Altair公司的HyperWorks软件建立有限元模型的过程,并进行动力学仿真分析。
计算出了悬架系统的模态和其在路面激励下的响应。
结果表明,此种建模和分析方法可以比较准确的反应出悬架系统的动态特性。
1)建立了包含铰链连接和衬套的双横臂前悬架有限元模型,其中铰链连接采用限制自由度的方法模拟。
比较真实的描述了悬架的动态特性,此种建模方法是准确、合理的。
2)悬架的动力学分析可以为设计部门的方案设计提供指导,提早发现悬架设计过程中存在- 5 -的问题,节省试验经费,缩短开发周期,在汽车产品开发的初期具有重大意义。
5 参考文献[1] 王望予编. 汽车设计[M]. 北京:机械工业出版社,2004.[2] 田应刚等. 轿车前悬架的有限元分析[J]. 清华大学学报:自然科学版,2001,41(8):90-93[3] 余志生编. 汽车理论[M]. 北京:机械工业出版社,2006.[4] HUANG L. Analysis of dynamic stress responses in structural vibration [C]. The 16th Biennial ASME Conference on Mechanical Vibration and Noise. Sacramento California ,1997.[5] 隋允康编. MSC.Nastran有限元动力分析与优化设计实用教程[M].北京:科学出版社,2004.[6] 张胜兰编. 基于HyperWorks的结构优化设计技术[M].北京:机械工业出版社,2007.[7] 李楚琳编. HyperWorks分析应用实例[M].北京:机械工业出版社,2008.7[8] A Li R. Use of finite element technique for the analysis of compo site structures [J]. Computers and Structures, 1996, 58(5):1015-1023The Dynamic Analysis of Double WishboneSuspension Using Finite Element Method Abstract: The front suspension of double wishbone is analyzed with the finite elementmethod (FEM). In the process of establishing the suspension model with the software of Altair HyperWorks , the relative motion of the joints is realized by a method of limiting the freedomof degrees. At the same time, the effects of bush component are considered. The results of dynamic analysis computed with this method are more realistic. The normal mode anddynamic response under road excitement are calculated. The results show that, the characteristics of suspension calculated with the finite element model is more accurate andit’s meaningful for the design of suspension.Key words: vehicle suspension HyperWorks finite element dynamic response- 6 -。