06_2 基点法
理论力学06_4刚体平面运动_加速度

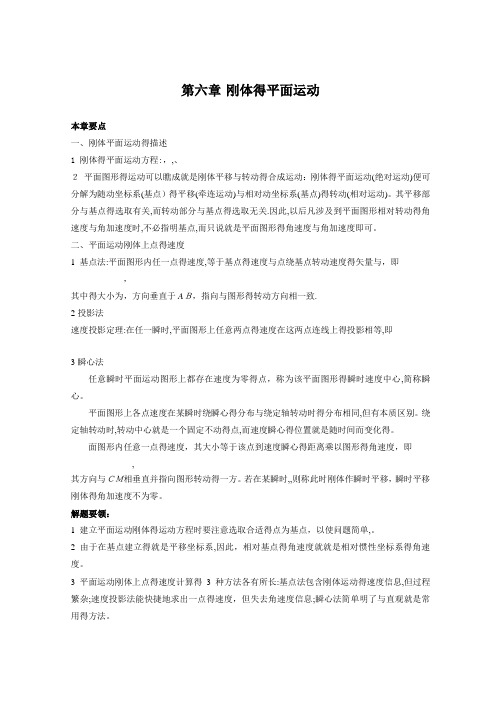
§6.3* 平面运动刚体上点的加速度由于平面运动可以看成是随同基点的牵连平移与绕基点的相对转动的合成运动,于是图形上任一点的加速度可以由加速度合成定理求出。
设已知某瞬时图形内A 点的加速度a A ,图形的角速度为ω,角加速度为α,如图6-13所示。
以A 点为基点,分析图形上任意一点B 的加速度a B 。
因为牵连运动为动坐标系随同基点的平移,故牵连加速度a e =a A 。
相对运动是点B 绕基点A 的转动,故相对加速度a r =a BA ,其中a BA 是点B 绕基点A 的转动加速度。
由式 (5.3.7)可得图6-13 加速度分析的基点法 α (6.3.1) BA A B αα+=由于B 点绕基点A 转动的加速度包括切向加速度和法向加速度a ,故式(6.3.1)可写为t BA a n BAa (6.3.2) n t BA BA A B a a a ++=即平面图形上任意一点的加速度,等于基点的加速度与该点绕基点转动的切向加速度和法向加速度的矢量和。
当基点A 和所求点B 均作曲线运动时,它们的加速度也应分解为切向加速度和法向加速度的矢量和,因此,式(6.3.2)可表示为(6.3.3)n t n t n t BA BA A A B B a a a a a a +++=+在式(6.3.3)中,相对切向加速度与点A 和B 连线方向垂直,相对法向加速度沿点A 和B连线方向从B 指向A ;仅当点A 和B 的运动轨迹已知时,才可以确定点A 和B 的切向加速度a 和及法向加速度和a 。
t BA a n BA a t A t B a n A a n B 在应用式(6.3.2)或(6.3.3)计算平面图形上各点的加速度时,只能求解矢量表达式中的两个要素。
因此在解题时,要注意分析所求问题是否可解。
当问题可解时,将式(6.3.2)或(6.3.3)在平面直角坐标系上投影,即可由两个代数方程联立求得所需的未知量。
例6.3-2:半径为R 的车轮沿直线滚动,某瞬时轮心O 点的速度为v O ,加速度为a O ,如图a 所示。
2016年建行房贷基准点
2016年建行房贷基准点近年来,房地产市场持续升温,购房需求不断增加,房贷成为了很多人购房的首选。
作为国内最大的商业银行之一,建设银行自然也成为了众多购房者的首选机构之一。
在2016年,建设银行的房贷利率也有了一些调整,其中最重要的指标就是房贷基准点。
一、什么是房贷基准点房贷基准点是指商业银行在给予个人购房贷款时所使用的利率基准。
一般来说,房贷基准点是由央行制定的,各个商业银行在央行的指导下执行。
建设银行作为国有大型银行,其房贷基准点的制定也受到央行的指导和监管。
二、2016年建行房贷基准点的变化在2016年,央行连续多次下调基准利率,以刺激经济增长和稳定金融市场。
建设银行也相应地调整了房贷基准点,以适应市场的需求变化。
具体来说,在2016年的前几个月,建设银行的房贷基准点为 4.9%,这是根据央行的指导制定的。
然而,随着央行的降息政策的实施,建行也多次下调了房贷基准点。
截至2016年底,建设银行的房贷基准点已经下调至 4.41%。
这一降低的幅度虽然不大,但对购房者来说仍然是一个积极的信号。
三、房贷基准点的影响房贷基准点的变化直接影响到购房者的还款利息。
基准点越低,购房者每月需要支付的利息也就越低,贷款成本也就越低。
因此,房贷基准点的调整对购房者来说是一个重要的利好消息。
房贷基准点的变化也会对房地产市场产生一定的影响。
当基准点下调时,购房者的还款压力减轻,购房需求增加,房地产市场活跃度也会提高。
相反,当基准点上调时,购房者的还款压力增加,购房需求减少,房地产市场活跃度也会下降。
四、建行房贷基准点的优势作为国内最大的商业银行之一,建设银行具有一定的优势,这也是为什么很多购房者选择建行进行房贷业务的原因之一。
建行的信誉度较高,经营稳定,具有较强的资金实力和风险控制能力。
这使得建行能够提供相对较低的利率和较长的贷款期限,满足购房者的不同需求。
建行具有完善的服务体系和丰富的产品选择。
购房者可以根据自己的需求选择不同的房贷产品,包括固定利率和浮动利率等。
点的合成运动刚体的平面运动

做出速度平行四边形, 如图示
ve va cos l cos 45
2 l()
2
小车的速度:v ve
vr
va
ve
[例] 曲柄肘杆压床机构 已知OA=0.15m , n=300r/min , AB=0.76m, BC=BD=0.53m。
图示位置时, AB水平求该位置时的 BD 、 AB 及 vD
解:轴O, 杆OC, 楔块M均作平动, 圆盘作平面运动,P为速度瞬心
vA v12 cm/s ,
vA/PA12/rcos 12/4cos302 3 rad/s
() vo POrsin4sin302 34 3 m/s()
PB PO 2 OB 2 2 PO OB cos120 22 42 2 2 4 1 2 7m 2
解:OA,BC作定轴转动, AB,BD均作平面运动 根据题意:
n 300 10 rad/s
30 30 研究AB, P1为其速度瞬心
vA OA 0.15 10 1.5 m/s ( )
AB
vA AP1
1.5
AB sin 60
1.5 2
0.76 3
7.16 rad/s
vB BP1 AB ABcos607.160.760.57.162.72 m/s
vB PB 2 72 34 2118.3 m/s ( PB)
第6章刚体的平面运动习题解答080814
,(逆时针)、
,
杆OB得角速度为
,(逆时针)、
两齿轮啮合点M得速度为,则轮1得角速度为
,(逆时针)、
6-9如图所示,轮O在水平面上匀速滚动而不滑动,轮缘上固连销钉连接滑块B,此滑块在摇杆得槽内滑动,并带动摇杆绕轴转动。已知轮得半径m,在图示位置时,就是轮得切线,轮心得速度m/s,摇杆与水平面得夹角为。求摇杆得角速度与角加速度。
解:如图所示,对各构件进行速度分析、
1)杆作平面运动、因,所以杆为瞬时平移,得
、
2)杆作平面运动、由找得杆得速度瞬心为D点,所以,杆上得速度分布好像与三角板一起绕作定轴转动一样,得
,方向如图示、
3)杆作平面运动、由找得杆得速度瞬心为,故有
,(顺时针);
,(方向向上).
6—5图示四连杆机构中,连杆由一块三角板ABD构成。已知曲柄得角速度rad/s,mm,mm,mm。当mm铅直时,AB平行于,且、A、D在同一直线上,角。求三角板ABD得角速度与点D得速度.
解:1)速度分析、
动齿轮A在定齿轮O上作纯滚动,所以,动齿轮A上与定齿轮O接触得这点就就是动齿轮得A得速度瞬心,于就是有
,,(逆时针)、
、
选BE杆上得B点为动点,套筒C为动系,如图(a)。由速度合成定理
,
得
,
、
式中、从而杆BE得角速度为
,(顺时针)、
当选BE杆上得为动点时,牵连速度为零,又因为杆相对于套筒就是作平移,从而杆BE上得点得速度为
解出
,
,
于就是,杆得角速度为
,(逆时针);
杆得角速度为
,(顺时针)、
选取滑块上得销钉C为动点,摇杆为动系,则
工程力学1

1.2.3.4.A. 必汇交于一点B. 必互相平行C. 必在同一面D. 可以不在同一面1. A. 采用合理截面2. B. 合理安排梁的受力情况3. C. 采用变截面梁或者等强度梁4.D. 以上都是1.2.3.4.A. 第一和第二B. 第三和第四C. 第一和第四D. 第二和第三1. A. 在外力作用下构件反抗变形的能力2. B. 在外力作用下构件保持原有平衡态的能力3. C. 在外力作用下构件反抗破坏的能力1. A. 在工程实际中构件往往受几种变形的组合作用;2. B. 线应变和角应变是没有单位的量3. C. 角应变的单位不是用弧度来表示的;4. D. 应力的单位是 Pa1.A. 增大梁的抗弯刚度2. B. 缩小跨度或者增加支承3. C. 改善结构形式并合理安排载荷作用点4. D. 加之与工作方向相同的变形即预拱1. A. 挠度为零,转角也为零2. B. 挠度为零,转角不为零3. C. 挠度不为零,转角为零4. D. 挠度不为零,转角也不为零1.2.3.4.A. 1%B. 3%C. 5%D. 10%1.2.3.4.A. 构件具有足够的强度B. 构件具有足够的刚度C. 构件具有足够的稳定性D. ABC1. A.√2. B.×1. A.√2. B.×1. A.√2. B.×1. A.√2. B.×1. A.√2. B.×1. A.√2. B.×1. A.√2. B.×1. A.√2. B.×1. A.√2. B.×1. A.√2. B.×1. A.√2. B.×1. A.√2. B.×1. A.√2. B.×1. A.√2. B.×1. A.√2. B.×1. A.√2. B.×1. A.√2. B.×1. A.√2. B.×1. A.√2. B.×1. A.√2. B.×1. A.√2. B.×1. A.√2. B.×1. A.√2. B.×1. A.√2. B.×1、减小压杆的长度2、选择合理的截面形状3、增加支承的刚性4、合理选用材料平面图形内任一点的速度,等于基点的速度与该点绕基点相对转动速度矢量和。
理论力学06_2基点法

§6.2 平面运动刚体上点的速度1 基点法任何平面图形的运动都可视为随同基点的平移和绕基点转动的合成运动。
随着平面图形运动的分解与合成,图形上任一点的运动也相应地分解与合成。
应用点的合成运动的方法,便可求出图形上任一点的速度。
如图6-6所示,设某一瞬时图形上A 点的速度v A ,图形的角速度为ω。
若选A 点为基点,则根据点的速度合成定理,图形上任一点B 的绝对速度为v (6.2.1) r e v v +=B 由于牵连运动为动坐标系随同基点的平移,故牵连速度v e =v A 。
相对运动为图形绕基点A 的转动,即图形上各点以基点A 为中心作圆周运动,故相对速度为以AB 为半径绕A 点作圆周运动时的速度,记为v BA ,其大小为v BA =AB ⋅ω,方向垂直于AB ,指向与图形的转动方向一致。
B 点的速度可表示为v (6.2.2) BA A B v v +=即平面图形内任一点的速度,等于基点速度与该点绕基点转动速度的矢量和。
基于该结论计算平面图形内任一点速度的方法称为基点法。
例6.2-1图图6-6 平面运动刚体上点的速度的合成在应用时,应该注意到式(6.2.2)是一个矢量表达式,各矢量均有大小和方向两个要素,式中共有六个要素。
由于相对速度的方向总是已知的,它垂直于线段AB 。
因此还应知道另外三个要素,方可求解剩余的两个要素。
特别是若已知或求得平面图形角速度,以点A 为基点,用式(6.2.2)可求出图形上任意点的速度。
此外,应用式(6.2.2)作速度平行四边形时,必须注意应为速度平行四边形的对角线。
BA v B v 例6.2-1:曲柄滑块机构如图所示。
曲柄OA =20cm ,绕O 轴以等角速度ω0=10rad/s 转动,连杆AB =100cm 。
当曲柄与连杆相互垂直并与水平线间各成α=45°和β=45°时,求滑块B 的速度和AB 杆的角速度。
解:曲柄OA 作定轴转动,连杆AB 作平面运动,滑块B 作平移。
大学物理力学ppt课件

02
非线性物理力学的研究对象与 方法
03
非线性物理力学的应用领域与 发展趋势
混沌现象与分形几何在物理力学中应用
01
02
03
混沌现象的基本概念与 原理
分形几何在物理力学中 的应用
混沌现象与分形几何在 物理力学中的联系与区
别
量子物理力学发展前沿
量子物理力学的基本概念与原理 量子物理力学的研究对象与方法 量子物理力学的发展前沿与未来趋势
E=mc^2,表示物体的能量与其质量成正比,其中c为光速。
02
能量与质量的等价性
质能方程揭示了能量与质量的等价性,即能量可以转化为质量,质量也
可以转化为能量。
03
核反应中的质量亏损与能量释放
在核反应中,反应前后的质量差乘以光速的平方即为释放的能量。
广义相对论简介
01
等效原理
在局部区域内,无法 区分均匀引力场和加 速参照系中的物理效 应。
感谢观看
02
时空弯曲
物质的存在会导致时 空的弯曲,物体的运 动轨迹受弯曲时空的 影响。
03
引力波
加速运动的物体会辐 射引力波,引力波是 时空弯曲中的涟漪效 应。
04
黑洞与宇宙学
广义相对论预言了黑 洞的存在,并为宇宙 学提供了理论框架。
06
现代物理力学进展与应用
Chapter
非线性物理力学概述
01
非线性物理力学的基本概念与 原理
应用场景
解释飞机升力、喷雾器原理、虹吸现象等。
注意事项
仅适用于不可压缩、无粘性的理想流体,且流动必须是定常的。
黏性现象与斯托克斯定律
01
黏性现象
流体内部由于分子间相互作用而 产生的内摩擦力,表现为流动阻 力。
理论力学_第06章_刚体的平面运动分析_4 (NXPowerLite)

vB= vA+ vBA
x´ 其中, B点相对速度(定轴转动线速度):
(B点绕A点 作定轴转动)
vBA = ω ×rB
任意点的速度 = 基点绝对速度 + B点相对速度 (矢量和)
速度分析: 速度投影法
速度投影定理法:
用速度投影定理分析平面 图形上点的速度的方法
vBA vB
B
rAB B vA A A vA
定轴转动
曲柄滑块机构
直线平移
刚体平面运动的模型简化
刚体平面运动: 刚体上处于同一平面内的各点到固定平面的
距离保持不变 运动轨迹在各平面内
S2面内:
S和A点到S1面的距离相同,S点相对A 点转动或静止(两点间距固定,不可
能相对平动;二者可同时平动);
面内各点运动可由SA直线的运动代表
A1A2线上:
yP
r2 (l-l1) l
sin ωt
平面运动分解(平移+转动)
在t内,平面图形由位置I运动到Ⅱ, 线段从AB运动到A´B´
A点处地安放平移坐标系,其原点A称为基 点。
由平面运动方程可见: A点固定不动,刚体作定轴转动 线段AB方位不变(=常数),刚体作平移
平面运动分解为随基点A的平移(牵连运动)和绕基点A的转动(相对运动)
B 速度分析: 瞬时速度中心法
rAB B A A vA
vA
vB= vA+ vBA vBA = ω ×rB
瞬时速度中心的概念
只有vA和vBA共线时, 合速度才可能为0
y’ vCA
P
C
S
vA
0 A
vA
过A点作vA的垂直线PA,PA上各点的速度由两
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
§6.2 平面运动刚体上点的速度
1 基点法
任何平面图形的运动都可视为随同基点的平移和绕基点转动的合成运动。
随着平面图形运
动的分解与合成,图形上任一点的运动也相应地分解与合成。
应用点的合成运动的方法,便可
求出图形上任一点的速度。
如图6-6所示,设某一瞬时图形上A 点的速度v A ,图形的角速度为ω。
若选A 点为基点,
则根据点的速度合成定理,图形上任一点B 的绝对速度为
v (6.2.1) r e v v +=B 由于牵连运动为动坐标系随同基点的平移,故牵连速度v e =v A 。
相对运动为图形绕基点A 的转
动,即图形上各点以基点A 为中心作圆周运动,故相对速度为以AB 为半径绕A 点作圆周运动
时的速度,记为v BA ,其大小为v BA =AB ⋅ω,方向垂直于AB ,指向与图形的转动方向一致。
B 点
的速度可表示为
v (6.2.2) BA A B v v +=即平面图形内任一点的速度,等于基点速度与该点绕基点转动速度的矢量和。
基于该结论计算
平面图形内任一点速度的方法称为基点法。
图6-6 平面运动刚体上点的速度的合成
在应用时,应该注意到式(6.2.2)是一个矢量表达式,各矢
量均有大小和方向两个要素,式中共有六个要素。
由于相对速
度的方向总是已知的,它垂直于线段AB 。
因此还应知道另
外三个要素,方可求解剩余的两个要素。
特别是若已知或求得
平面图形角速度,以点A 为基点,用式(6.2.2)可求出图形上任
意点的速度。
此外,应用式(6.2.2)作速度平行四边形时,必须注意应为速度平行四边形的对
角线。
BA v B v 例6.2-1:曲柄滑块机构如图所示。
曲柄OA =20cm ,绕O 轴以等角速度ω0=10rad/s 转动,
连杆AB =100cm 。
当曲柄与连杆相互垂直并与水平线间各成α=45°
和β=45°时,求滑块B 的速度和AB 杆的角速度。
解:曲柄OA 作定轴转动,连杆AB 作平面运动,滑块B 作平移。
A 点作圆周运动,B 点作直线运动。
以A 点为基点,研究AB 杆的运动。
由式(6.2.2),有
v (a) BA A B v v +=其中基点速度已知,v A =OA ⋅ω0=2m/s ,方向垂直于OA ;v B 和v BA 的方向均已知,大小待求。
作
出B 点的速度平行四边形,由图中几何关系可得
m/s 22cos ==αA B v v , 2==A BA v v m/s, 2==AB
v ωBA BA rad/s (b) 由相对速度v AB 的指向及其相对于A 的位置,可以判明角速度ωAB 的转向为顺时针方向。
例6.2-3图 例6.2-2:如图所示,半径为R 的车轮沿直线轨道作纯滚
动(没有相对滑动的滚动)。
已知轮心以匀速v O 前进。
求轮缘上
A 、
B 、
C 、
D 各点的速度。
解:轮作平面运动,轮心运动已知,故以轮心为基点进行
求解。
由式(6.2.2),轮缘上任意一点M 的速度可表示为
v (a)
MO O M v v +=v MO 的大小为R ω,方向垂直于半径,注意这里角速度ω是未知
的,故v MO 的大小仍属未知。
而轮缘上各点速度的大小和方向
均未知。
暂不能直接求解轮缘上各点的速度。
考虑到车轮的纯
滚动条件,可以先求得车轮角速度。
由于轨道静止不动,而轮与轨道的接触点相对于轨道没有
滑动,因此轮上C 点的速度应为零,即v C =0。
由v C =v O +v CO =0,且v CO =R ω,故
R
v R v O CO ==ω (b) 如图所示,ω为顺时针转向。
当ω求得后,各点相对于基点的速度即可求。
作A 、B 、D 点速度
平行四边形,由几何关系可得各点速度为
v ,O A v 2=O B v v 2=,O D v 2=v (c)
各点的速度方向如图示。
例6.2-3:平面四连杆机构如图所示。
曲柄OA 以匀角速度ω0绕O 轴转动,在图示位置,点O 1与OA 在水平线上,点O
与BC 在铅直线上。
已知OA=O 1O=r , BC=2r , ∠OAB=45°,求点
C 的速度。
解:OA 杆和O 1B 杆作定轴转动,曲柄ABC 作平面运动,
其上A 点和B 点的运动轨迹为圆周曲线,C 点的轨迹是一条未
知的平面曲线。
研究曲杆ABC 的运动,若以A 点为基点,分析
表明不能直接求出C 点速度,必须先求曲杆ABC 的角速度。
为
此,以A 点为基点,研究B 点的速度。
由式(6.2.2),有
v (a)
BA A B v v +=式中v A 大小和方向已知,大小为v A =ω0r ,方向垂直于OA 杆,
v B 和v BA 的方向均已知,大小待求。
作速度平行四边形如图所
示,由图中几何关系得
r ωv v A B BA 02
245cos ===o v (b) 曲杆ABC 的角速度为
02
12ωω===r v AB v BA BA ABC (c) 方向如图所示。
求得ωABC 后,可以选取A 点(或B 点)为基点,求C 点的速度。
为了计算方便,
取B 为基点,由式(6.2.2),C 点的速度为
v (d) CB B C v v +=式中v B 已知,大小为v B =2ω0r /2,方向垂直于O 1B 杆,v C 的大小和方向均未知,v CB 方向垂直于BC ,大小为v CA =ωABC ⋅BC=ω0r 。
作速度平行四边形如图所示,得到 r ωv v v v CB B CB B C 0222245cos 2=++=o v (e) v C 与水平线间的夹角为 6218135sin arcsin ′==o o C B v v β (f)。