第三讲 定点转动、基点法
06_2 基点法
§6.2 平面运动刚体上点的速度1 基点法任何平面图形的运动都可视为随同基点的平移和绕基点转动的合成运动。
随着平面图形运动的分解与合成,图形上任一点的运动也相应地分解与合成。
应用点的合成运动的方法,便可求出图形上任一点的速度。
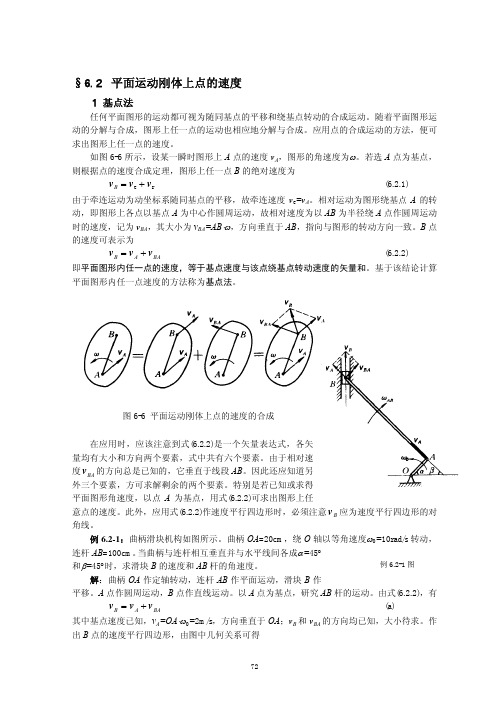
如图6-6所示,设某一瞬时图形上A 点的速度v A ,图形的角速度为ω。
若选A 点为基点,则根据点的速度合成定理,图形上任一点B 的绝对速度为v (6.2.1) r e v v +=B 由于牵连运动为动坐标系随同基点的平移,故牵连速度v e =v A 。
相对运动为图形绕基点A 的转动,即图形上各点以基点A 为中心作圆周运动,故相对速度为以AB 为半径绕A 点作圆周运动时的速度,记为v BA ,其大小为v BA =AB ⋅ω,方向垂直于AB ,指向与图形的转动方向一致。
B 点的速度可表示为v (6.2.2) BA A B v v +=即平面图形内任一点的速度,等于基点速度与该点绕基点转动速度的矢量和。
基于该结论计算平面图形内任一点速度的方法称为基点法。
图6-6 平面运动刚体上点的速度的合成在应用时,应该注意到式(6.2.2)是一个矢量表达式,各矢量均有大小和方向两个要素,式中共有六个要素。
由于相对速度的方向总是已知的,它垂直于线段AB 。
因此还应知道另外三个要素,方可求解剩余的两个要素。
特别是若已知或求得平面图形角速度,以点A 为基点,用式(6.2.2)可求出图形上任意点的速度。
此外,应用式(6.2.2)作速度平行四边形时,必须注意应为速度平行四边形的对角线。
BA v B v 例6.2-1:曲柄滑块机构如图所示。
曲柄OA =20cm ,绕O 轴以等角速度ω0=10rad/s 转动,连杆AB =100cm 。
当曲柄与连杆相互垂直并与水平线间各成α=45°和β=45°时,求滑块B 的速度和AB 杆的角速度。
解:曲柄OA 作定轴转动,连杆AB 作平面运动,滑块B 作平移。
定点转动的 CAI 教学

定点转动的 CAI 教学邓先金【摘要】刚体的定点转动教学是理论力学教学中的难点之一。
该文介绍了用3DSMAX3设计制作有关定点转动的系列动画,包括定点转动的概念———倒立圆锥的定点转动和陀螺的定点转动,定点转动的分解———纯自转、纯进动和纯章动,定点转动的合成及空间极面与本体极面,以及教学过程中对动画的使用方法。
引入计算机辅助教学,将定点转动制作成动画,使定点转动的教学过程形象化,提高了教学效果。
%The teaching of rigid body fixed -point rotation is one of the difficulties in the teaching of Theory Mechanics.This pa-per introduces the design and use of 3DSMAX3 series of fixed -point rotation animations,including the notion of fixed point rotation -the fixed point rotation of inverted cone and the fixed point rotation of gyroscope,the decomposition of fixed point rotation -pure rota-tion,pure precession and pure nutation,the synthesis of fixed point rotation ,polhode polar and herpolhode polar,as well as the use method of animation in the teaching process.The introduction of computer -aided teaching with the fixed point ratation made into ani-mation,the teaching process is thus visual and teaching effect is improved.【期刊名称】《实验科学与技术》【年(卷),期】2016(014)006【总页数】3页(P148-150)【关键词】定点转动;动画;分解;合成;制作;使用【作者】邓先金【作者单位】西南科技大学理学院,四川绵阳 621010【正文语种】中文【中图分类】G4341.1 定点转动的概念1)原理刚体运动时,如果刚体内始终有一点保持不动,这样的运动叫定点转动[4]。
刚体定点转动知识点总结
刚体定点转动知识点总结一、刚体定点转动的基本概念1. 刚体的定义刚体是指物体的每一点在运动中的位置都相对于其他点保持不变的物体。
即刚体在运动中不会发生形变,它的形状和大小保持不变。
2. 定点转动的定义定点转动是指刚体绕着固定的轴线或固定的点进行旋转运动的情况。
在定点转动中,刚体的每一点都绕着同一个轴线或固定点进行圆周运动。
3. 转动的描述在描述刚体定点转动时,我们通常使用角度来描述刚体的旋转情况。
角度是用来表示两条射线之间夹角大小的物理量,它可以用弧度或角度来表示,其中弧度是圆周的一个长度单位,而角度是圆周的1/360。
二、刚体定点转动的基本原理1. 牛顿定律牛顿定律是刚体定点转动的基本原理之一。
在刚体绕固定点进行旋转运动时,牛顿第一定律描述了刚体的转动惯量,即刚体在旋转运动时会保持直线运动状态,除非受到外力的作用。
2. 角动量守恒定律角动量守恒定律是刚体定点转动的另一个基本原理。
它描述了在刚体围绕固定轴旋转时,刚体的角动量在没有外力作用的情况下会保持不变。
三、刚体定点转动的基本特点1. 轴线转动和定点转动刚体定点转动包括轴线转动和定点转动两种情况。
轴线转动是指刚体在绕着固定轴线进行旋转运动,而定点转动是指刚体在绕着固定点进行旋转运动。
这两种转动情况在物理上有着不同的特点和规律。
2. 角速度和角加速度在刚体定点转动中,角速度和角加速度是描述刚体旋转情况的重要物理量。
角速度表示刚体绕着轴线或固定点旋转的快慢,而角加速度表示刚体旋转速度的变化率。
3. 转动惯量转动惯量是刚体定点转动中一个重要的物理量,它描述了刚体围绕固定轴线或固定点进行旋转运动时所具有的惯性。
转动惯量的大小和刚体的形状、质量分布等因素有关,它是刚体定点转动的重要参数之一。
四、刚体定点转动的相关定律和公式1. 角速度公式在刚体定点转动中,角速度与线速度之间存在着一定的关系。
当刚体绕固定轴线旋转时,它的线速度v和角速度ω之间存在着以下关系:v = rω其中,v表示刚体上某一点的线速度,r表示该点到轴线的距离,ω表示角速度。
第三章刚体定点转动
第三章刚体定点转动§3.1定点转动运动学一、什么是定点转动?刚体转动时,如果刚体内只有一点始终保持不动,这种运动叫刚体的定点转动。
由于做定点转动时刚体上有一点固定不动,一般以定点为基点。
陀螺、回转罗盘(用于航空和航海方面)等,都是刚体绕定点转动的实例。
它们都只有一点不动。
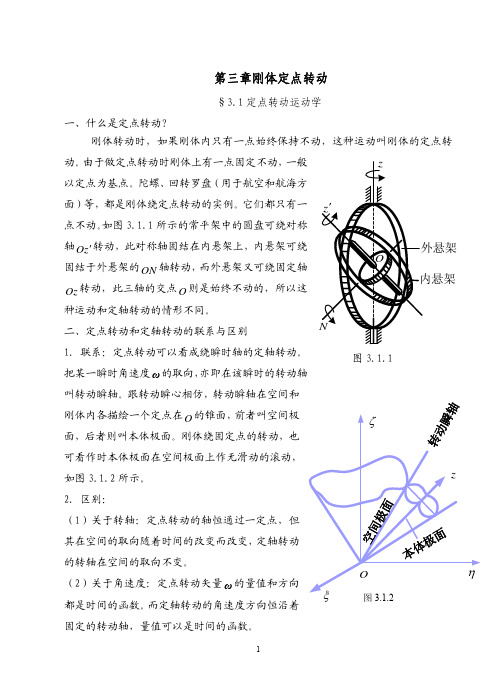
如图3.1.1所示的常平架中的圆盘可绕对称轴z O ′转动,对称轴固结在内悬架上,内悬架可绕固结于外悬架的图3.1.1此,ON 轴转动而外悬架又可绕固定轴Oz 转动,此三轴的交点O 则是始终不动的,所以这种运动和定轴转动的情形不同。
二、定点转动和定轴转动的联系与区别1.联系:定点转动可以看成绕瞬时轴的定轴转动。
把某一瞬时角速度ω的取向,亦即在该瞬时的转动轴叫转动瞬轴。
跟转动瞬心相仿,转动瞬轴在空间和刚体内各描绘一个定点在O 的锥面,前者叫空间极面,后者则叫本体极面。
刚体绕固定点的转动,也可看作时本体极面在空间极面上作无滑动的滚动,如图3.1.2所示。
2.区别:(1)关于转轴:定点转动的轴恒通过一定点,但其在空间的取向随着时间的改变而改变,定轴转动的转轴在空间的取向不变。
(2)关于角速度:定点转动矢量的量值和方向都是时间的函数。
而定轴转动的角速度方向恒沿着固定的转动轴,量值可以是时间的函数。
ω三、定点转动时刚体上任一点的速度r dt r d v v vv ×==ωυ (3.1.1)P图3.1.3如图3.1.3所示,刚体上任一点P 的运动可以看成是绕瞬时轴的转动,所以其速度在圆周的切线方向,大小为R ωυ=.四、定点转动时刚体上任一点的加速度由加速度的定义知r r r dtd r r dt d r dt d dt d a vv v v v vv v v v v v v v v v v 2)()(ωωωωωωωυωωυ−⋅+×=××+×=×+×==而 R r r v v v v v 22)(ωωωω−=−⋅则R r dtd a v v v v 2ωω−×= (3.1.2)上式中的第一项r dtd vv×ω为转动加速度,第二项R v 2ω−为向轴加速度. 例:半径为a 的碾盘在水平面上做无滑滚动,长为b 的水平轴OA 绕竖直轴OE 以匀角速度1ω转动,如图3.1.4所示.求碾盘最高点P 的速度和加速度.x图3.1.4解: 碾盘绕定点O 运动,取如图所示的直角坐标系,OA=b,AB=OE=a,j a i b r P ˆˆ+−=v 要使碾盘在水平面上做无滑滚动,则瞬时角速度的方向为BO 方向,且iab j j i ˆˆˆˆ1121ωωωωω+=+=v.则 kb j a i b i ab j r P P ˆ2)ˆˆ()ˆˆ(111ωωωωυ=+−×+=×=vv v . 或用瞬轴法:P 点速度大小:b PD P 12ωωυ=⋅=. 方向:oz 轴方向.加速度: ja b i b r dt d dt d a P P Pˆˆ321221ωωυωωυ−=×+×==v v v v v v§3.2定点转动刚体对定点的动量矩一、刚体的动量矩图3.2.1刚体是一特殊的质点系,刚体作定点转动时对定点O 的动量矩(角动量)等于刚体上的各质点对定点O 的动量矩之和(矢量和)。
关于定点转动与定轴转动

转动有两种模型,定点转动与定轴转动,顾名思义,定点转动是物体绕某一 固定点的转动, 例如粒子在球面上绕球心的运动就可以视为这种情况,定轴转动 是物体绕某一固定转轴的转动, 例如地球绕地轴的自转就属于这种情况。从物理 上看,定轴转动比定点转动的约束多,因此定点转动比定轴转动的自由度要多, 这两种情况下的哈密顿量的写法是: 对于定点转动,(I 为转动惯量)
2 ) l (l + 1) 2Ylm (θ ,ϕ ) 因为 L Ylm (θ ,ϕ=
l (l + 1) 2 所以,其能量本征值为: 2 I
易知其能级为 2l+1 重兼并的。 ②对于定轴转动,易求得其归一化的本征函数为:
Φ m (ϕ ) = 1 imϕ e 2π 1 ∂ ∂ L2 = − H= sin θ ∂θ 2I 2 I sin θ ∂θ 1 ∂2 + 2 2 sin θ ∂ϕ
π
量算符的第一项取为 0,所以定轴转动的哈密顿量为:
Lz 2 2 ∂2 H= − = 2 I ∂ϕ 2 2 I
对于定轴转动,相当于上面的θ=2 的情形,这时θ为常量,因此上面的哈密顿
pr , 若令 er ⋅ p = 它表示动量沿径向的分量, 称为径向动量, 利用上式可知,
p 2 pr 2 L2 = + 2µ 2µ 2µ r 2
粒子的能量为:
= E
其中第一项称之为径向动能,在定点转动与定轴转动的情况下,取粒子粒子
2 的转动中心为坐标原点, 建立球坐标系, 此时, 粒子的径向动能为 0, 再 令 I = µr
能量本征值为:
Em =
m2 2 2I
除了基态能级外,其能级是二重简并的。
刚体绕固定点的运动

欧勒动力学方程
I1x I 2 I3 yz M x I3z I1 I 2 xy M z
欧勒运动学方程
I 2y I3 I1 zx M y
x sin sin cos y sin cos sin z cos
A是基点
[例] B当飞机在空中以定值速度V沿半径为R的水平圆形 轨道C转弯时,求当螺旋桨尖端B与中心A的联线和沿垂线成 θ角时,点的速度及加速度。已知螺旋桨的长度AB =l,螺 旋桨自身旋转的角速度为ω1。 解:这个是一般运动问题 dr v vA vA r dt
vA Vj
r ci bk
c v i k b
自转角速度ω1怎么求?
ci bk 2c j
d a r r dt
k
总
c i k b
i
r ci bk
d 总 c 2 j dt b
c a 2 j r 总 2c j b
2h 2 2 h 2 aA ( sin 2i cos 2j ) cos j sin sin 2h 2h sin 2i j sin sin 2h (sin 2i j ) sin
③
d总 2 ctgk dt
dt ?
解: (1)以定点o为原点,以oζ轴为y 轴,以oM为x轴,取转动坐标系。 则: j cosi sin j
为圆锥绕轴线转动的角速度。圆锥体的总角速度 其中,
总 ( sin )j ' cosi
物理竞赛讲义(三)力矩、定轴转动物体的平衡条件、重心

郑梁梅高级中学高一物理竞赛辅导讲义第三讲:力矩、定轴转动物体的平衡条件、重心【知识要点】(一)力臂:从转动轴到力的作用线的垂直距离叫力臂。
(二)力矩:力和力臂的乘积叫力对转动轴的力矩。
记为M=FL ,单位“牛·米”。
一般规定逆时针方向转动为正方向,顺时针方向转动为负方向。
(三)有固定转轴物体的平衡条件作用在物体上各力对转轴的力矩的代数和为零或逆时针方向力矩总是与顺时针方向力矩相等。
即ΣM=0,或ΣM 逆=ΣM 顺。
(四)重心:物体所受重力的作用点叫重心。
计算重心位置的方法:1、同向平行力的合成法:各分力对合力作用点合力矩为零,则合力作用点为重心。
2、割补法:把几何形状不规则的质量分布均匀的物体分割或填补成形状规则的物体,再由同向(或反向)平行力合成法求重心位置。
3、公式法:如图所示,在平面直角坐标系中,质量为m 1和m 2的A 、B 两质点坐标分别为A (x 1,y 1),B (x 2,y 2)则由两物体共同组成的整体的重心坐标为: 212211m m x m x m x C ++= 212211m m y m y m y C ++= 一般情况下,较复杂集合体,可看成由多个质点组成的质点系,其重心C 位置由如下公式求得:i i i C m x m x ∑∑= i i i C m y m y ∑∑= ii i C m z m z ∑∑= 本节内容常用方法有:①巧选转轴简化方程:选择未知量多,又不需求解结果的力线交点为轴,这些力的力矩为零,式子简化得多;②复杂的物体系平衡问题有时巧选对象:选整体分析,常常转化为力矩平衡问题求解;③无规则形状的物体重心位置计算常用方法是通过割补思想,结合平行力合成与分解的原则处理,或者助物体重心公式计算。
【典型例题】【例题1】如图所示,光滑圆弧形环上套有两个质量不同的小球A 和B 两球之间连有弹簧,平衡时圆心O 与球所在位置的连线与竖直方向的夹角分别为α和β,求两球质量之比。
09 刚体的平面运动--基点法

基点法:用速度合成定理来求平面图形内任一点的速度的方法。
PAG 13
基点法题目: 用速度合成定理
vB v A vBA
PAG 14
基点法求平面图形内各点速度的解题步骤:
1、分析题中各物体的运动:平移,转动,平面运动; 2、分析已知要素:研究作平面运动的物体,分析点的 速度大小和方向;
大小 方向 ? √ √ √ ? √
vA
x
A
vBx vAx vBAx
O
vA r
vB vA r
vA vB
vBA
B
vBA 0
当ψ=0°
vA vB
x
B
vBx vAx vBAx
vB 0
PAG 23
vBA
例8-4 图示行星轮系中,半径为r1的齿轮Ⅰ固定,半径为r2的 行星齿轮Ⅱ沿轮Ⅰ只滚不滑,杆OA角速度为ω0。求轮Ⅱ的角 速度ωⅡ及其上B,C 两点的速度。
vDA vA (r1 r2 )0
vDA 2 DA
(r1 r2 )0 r2
PAG 25
( r1 r2 ) 0 v A ( r1 r2 ) 0 ; 2 r2
vB v A vBA
? ? √ √ √ √
大小 方向
vA B C vB vBA v A A 11 vA Ⅱ 0 D vDA
O Ⅰ
vC v vCA A
vBA r211 (r1 r2 )0
vB
2vA 2 (r1 r2 )0
vC v A vCA
大小 方向 ? ? √ √ √ √
vCA r211 (r1 r2 )0
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
进动角 ψ = ∠x0ON 章动角 θ = ∠z0Oz 自转角 θ = ∠NOx
ϕz
ψ
z0
θ
y
刚体的定点转动可以 拆分成三个相对定轴转动 的复合。它可以用三个转 动参数描述。图示的欧拉
角 (ψ , θ , ϕ ) 就是一种定点
转动的定位参数。
x0
x
O
ϕ
y0
ψ
N
θ
2-2 动系单位基矢量的时间导数定理
定理:对任意动系的单位基矢量
解:圆锥体作定点运动。圆锥体与坐标面Oxy相接触的母
线OA即是该定点运动的瞬时转动轴。
由定点转动刚体的速度分布公式, C点的速度:
e3 z
C
ωOxyz
r
O1
x
vC h
ω
e1 A
O
e2 y
vC = ω × rOC
vC = 48e2 ω = −ωe1 rOC = 16 / 5e1 +12 / 5e3
ω = −20e1 (rad/s)
z
C
r
h
x d vC
A
O
Oxyz定轴转动,其角 速度 ωOxyz , 根据定义
e&i = ωOxyz × ei , i = 1, 2,3
ω = vC d = 48 /(3× 4 / 5) = 20
∴ ω = −20e1 (rad/s)
ω
z0 z
y
e3
ωOxyz
x0 A0 e1 x A
O e2
y0 y
动系相对定系的角速度: ω = ω1e1 + ω2e2 + ω3e3
定义:刚体上固连坐标系的角 速度定义为刚体的角速度。
定轴转动刚体的角速度: ω = ϕ&e3 = ϕ&k
e&3 = 0 e&1 = ω × e1 = ϕ&e3 × e1 = ϕ&e2 e&2 = ω × e2 = ϕ&e3 × e2 = −ϕ&e1体的所有点的
运动轨迹的形状都一样,
任意时刻所有的点的速度
和加速度都一样。平动刚
体上任意一点的运动就可
代表其运动特性。
ε
C点的运动轨迹与A、 B两点的运动轨迹形状相 同,即以O点为圆心l为半 径的圆弧线。
定点转动:其上一点永远保持不动的刚体运动。
刚体姿态的欧拉角表示
定义节线ON 为 Oxy平面与Ox0y0平面的交线。
v =ω×r
ω 为刚体的角速度
证明:
刚体上的点P,在固连系 O xyz的坐 标 (x, y, z) 不随时间变化。其矢径
z e3 z0
vP r
e2y
x0
O
x e1
y0 ω
r = xe1 + ye2 + ze3
v = r& = xe&1 + ye&2 + ze&3
= x (ω× e1 ) + y (ω× e2 ) + z (ω× e3 )
存在唯一的角速度矢量 ω 使
e&i = ω× ei , i = 1, 2, 3
z e3 k z0
分析:任意单位矢量的导数与它本
身垂直,e&i ⊥ ei , i = 1, 2, 3
ω1
利用叉积的性质,存在 ωi , i = 1, 2, 3
e&1 动系
e2 y
定系 j
e&1 = ω1 × e1 = (ω11e1 + ω12e2 + ω13e3 ) × e1
e3 z
vC = ω × rOC
ωoxyz
vC = ωOxyz × rOC
vC h
O1 O
ε
ω
ω = −20e1 (rad/s) ωOxyz = 15e3 ( rad/s)
e2 y ω 矢端图
根据角速度的定义 e&i = ωOxyz × ei , i = 1, 2,3
角加速度
( ) ε = ω& = −20e&1 = −20ωOxyz × e1 = −300e2 rad/s2
v = ω× r a = ε × r + ω×(ω× r)
§2-5 刚体一般运动及基点法
固连坐标系Oxyz代表刚体、定参考系 O0x0 y0z0完全代 表刚体相对定系的运动。
坐标轴始终保持与其初始位置 平行且方向一致的动坐标系称 为平动坐标系。
z
zp
y
Oxpypzp定义为随基点O平动 的坐标系,称为基点平动
本周作业:李俊峰、张雄主编《理论力学》
(1)熟悉刚体的定义、刚体运动的分类和性质, 并 研究角速度的定义和性质。 (2)习题 2-17、 2-18
瞬时转轴及有关性质
v = ω× r 在不同瞬时,瞬时转轴在空间的
方位以及刚体上的位置各不相同。
C
ω
v
O
定点运动刚体在每一瞬时的 真实运动,就是绕每一瞬时转动 轴转动;
平动刚体的所有点的运动 轨迹的形状都一样,任意时刻
Z
所有的点的速度和加速度都一 样。平动刚体上任意一点的运 O
动就可代表其运动特性。
rAB = 常矢量 r&AB = 0
rB = rA + rAB
r&B = r&A vB = vA
&r&B = r&&A aB = aA
A rAB
rA
B
Y rB r X A AB
⎡0
Ω=
⎢ ⎢
ω3
⎢⎣− ω2
反对称
− ω3 ω2 ⎤
0
−
ω1
⎥ ⎥
ω1 0 ⎥⎦
(e&1 ,e&2 ,e&3 ) = (e1 ,e2 ,e3 ) AT A& = (e1 ,e2 ,e3 ) Ω
⎡0
Ω=
⎢ ⎢
ω3
− ω3 ω2 ⎤
0
−
ω1
⎥ ⎥
⎢⎣− ω2 ω1 0 ⎥⎦
动系相对定系的角速度:
角速度矩阵
圆锥的底面中心C点在水平方向的速度 vC = 48cm/s = 常 数。已知圆锥高为h = 4cm,底面半径 r = 3cm。试求:
(1) 圆锥体的角速度和角加速度;
(2) C点及A点的加速度。
C
r
h
vC
A
O
解:圆锥体作定点运动。圆锥体与水平面相接触的母线OA即是该定 点运动的瞬时转动轴。圆椎体运动过程中瞬时转动轴绕通过O的铅 垂轴匀速定轴转动。取Oxyz坐标系, 如图所示,Oz轴垂直于水平 面, Ox轴跟随OA一起转动。 因此坐标系Oxyz作绕通过O的铅垂轴 定轴转动。
动系单位基矢量的时间导数
(e&1 ,e&2 ,e&3 ) = (i, j,k)A& = (e1 ,e2 ,e3 )AT A& = (e1 ,e2 ,e3 )Ω
( ) 其中 Ω = AT A& = −A& T A = − AT A& T = −ΩT
AT A = I A& T A + AT A& = 0
C点也可以看作是Oxyz坐标系上的点,
vC = ωOxyz × rOC
ωOxyz = 15e3 (rad/s)
2-4 刚体的角加速度及定点转动刚体的加速度分析
刚体的角加速度 ε = dω dt
刚体上一点的加速度
a = ε × r + ω× (ω× r )
证明:
v =ω×r a = v& = ω& × r + ω× r&
vP = vO +ω ×rOP aP = aO +ω ×(ω ×rOP) +ε ×rOP
rO0P = rO0O + rOP
在定系中对上式求时间导数
z e3 zp
r&O0P = r&O0O + r&OP &r&O0P = r&&O0O + r&&OP
P
命题:定系和平动系的单位基矢量相同
y
,任意动矢量在二者中的投影相同。动 矢量在两坐标系中的时间导数相同。
已知圆椎体的角速度和角加速度
e3 z
ω = −20e1 (rad/s)
aA
( ) ε = −300e2 rad/s2
计算圆椎体上C点及A点 的加速度
C aC
x
vC
e1 A
O1
ε
O
ω
aC = ε × rOC + ω × (ω× rOC )
e2 y
= −300e2 × (16 / 5e1 +12 / 5e3 ) + (−20e1) × 48e2
= ε×r + ω×v
= ε×r + ω×(ω×r)
向轴加速度
ω×(ω× r )
瞬时 C 转轴
ε×r 旋转加 r ω
速度
O
ε
定点转动刚体上 一点的加速度
证毕
2
解:圆锥体作定点运动。圆锥体与坐标面Oxy相接触的
母线OA即是该定点运动的瞬时转动轴。
C点是定点转动刚体上的点, 速度已知, 有:
C
r x
e1 A
坐标系。
z0
xp
O
yp
x
借助基点平动坐标系描述刚
rO0O
体运动的方法称为基点法。
x0
O0
y0
一般运动:刚体最一般的运动
刚体一般运动:可分解为随基点的平动+相对基点