旋转映射推导
旋转矩阵的严格推导

旋转矩阵的严格推导引言:旋转矩阵是线性代数中一个重要的概念,它可以用来描述二维或三维空间中的旋转变换。
在计算机图形学、机器人学和物理学等领域中,旋转矩阵被广泛应用。
本文将从严格的推导角度,介绍旋转矩阵的定义、性质以及推导过程。
一、定义旋转矩阵是一个正交矩阵,它表示了一个向量绕某个轴旋转的变换。
在二维空间中,旋转矩阵可以表示为:R = | cosθ -sinθ || sinθ cosθ |其中,θ表示旋转角度。
在三维空间中,旋转矩阵可以表示为:R = | cosθ -sinθ 0 || sinθ cosθ 0 || 0 0 1 |二、性质旋转矩阵具有以下几个性质:1. 正交性:旋转矩阵的转置等于它的逆矩阵,即R^T = R^(-1)。
2. 行列式为1:旋转矩阵的行列式等于1,即det(R) = 1。
3. 保持长度不变:旋转矩阵作用于一个向量时,向量的长度保持不变。
4. 保持内积不变:旋转矩阵作用于两个向量时,它们的内积保持不变。
三、推导过程下面将通过严格的推导过程,证明旋转矩阵的性质。
1. 正交性的证明:设矩阵R为:R = | a b || c d |则R的逆矩阵R^(-1)为:R^(-1) = | d/AD -b/AD || -c/AD a/AD |其中,AD = ad - bc。
根据矩阵乘法的定义,可以得到:R*R^(-1) = | a b | * | d/AD -b/AD | = | ad/AD - bc/AD 0 || c d | | -c/AD a/AD 0 |可以看出,R*R^(-1)的结果是一个对角矩阵,对角线上的元素都为1,其余元素都为0,即单位矩阵I。
所以,R*R^(-1) = I。
同样地,可以得到R^(-1)*R = I。
因此,矩阵R的转置等于它的逆矩阵,即R^T = R^(-1),证明了旋转矩阵的正交性。
2. 行列式为1的证明:由于矩阵R是一个正交矩阵,根据正交矩阵的性质可知,R的行向量和列向量都是单位向量且两两正交。
【中考数学专题】三大变换之旋转(旋转的性质)

【中考数学专题】三大变换之旋转(旋转的性质)
旋转是三大几何变换中考察最多、难度最大的,平移、对称从图像观察角度来说直接显然,对应的结论也很容易用到.而旋转变换得到的图形相对复杂些,有时候解题的突破口隐藏得更深,导致无从下手.本篇将从基本的性质开始,到一些常见的模型,最后说说关于构造旋转能给我们带来什么,全方位了解旋转在中考题中的考察.01基本性质
如下图,将△ABC绕点A旋转一定角度得到△ADE.
性质一:对应边相等
结论:AB=AD,AC=AE.
补充:当然还可以得到BC=DE,但这并没有什么用,因为BC与DE并没有特殊位置关系.
性质二:对应角相等
结论:∠B=∠D,∠C=∠E,∠BAC=∠DAE.
补充:如果不是特殊角,此性质并没有什么用,但由性质二可以推性质三.
性质三:旋转角都相等
结论:∠BAD=∠CAE=∠BFD.
补充:∠BAD=∠CAE易证,
∠BAD=∠BFD可用“8字”模型证明:
∵∠BAD+∠B=∠BFD+∠D,且∠B=∠D,
∴∠BAD=∠BFD.
且第三组夹角往往用得最多.
02真题速览
2019眉山中考-三角形的旋转
2019内江中考-旋转得等边
2019阜新中考-特殊角的旋转
2019包头中考-旋转角都相等
2018镇江中考-隐藏的特殊角
2019山西中考-解三角形2017吉林中考-矩形的旋转2019梧州中考-菱形的旋转2018陇南中考-正方形的旋转2019贺州中考-旋转的思考2019营口中考-动态的旋转来源:有一点数学,作者刘岳。
初中几何:三大变换之旋转(旋转的构造-托勒密定理)

初中几何:三大变换之旋转(旋转的构造-托勒密定理)成才路上奥数国家级教练与四名特级教师联手执教。
成才路上推荐搜索几何变换旋转托勒密定理本篇将介绍关于旋转的内容,一个关于旋转构造的定理-托勒密定理,定理本身并非课内知识,但在近年中考中,已经不止一次地出现了,因而值得重视.01定理介绍托勒密定理定理:圆的内接四边形中,两对角线所包矩形的面积等于一组对边所包矩形的面积与另一组对边所包矩形的面积之和.翻译:在四边形ABCD中,若A、B、C、D四点共圆,则AC·BD=AB·CD+AD·BC.定理证明证明:在线段BD上取点E,使得∠BAE=∠CAD,易证△AEB∽△ADC,∴AB:AC=BE:CD,即AC·BE=AB·CD,当∠BAE=∠CAD时,可得:∠BAC=∠EAD,易证△ABC∽△AED,∴AD:AC=DE:CB,即AC·DE=AD·BC,∴AC·BE+AC·DE=AB·CD+AD·BC,∴AC·BD=AB·CD+AD·BC.定理推广-托勒密不等式推广(托勒密不等式):对于任意凸四边形ABCD,AC·BD≤AB·CD+AD·BC证明:如图1,在平面中取点E使得∠BAE=∠CAD,∠ABE=∠ACD,易证△ABE∽△ACD,∴AB:AC=BE:CD,即AC·BE=AB·CD①,连接DE,如图2,∵AB/AC=AE/AD,∴AB/AE=AC/AD,∠BAC=∠BAE+∠CAE=∠DAC+∠CAE=∠DAE,∴△ABC∽△AED,∴AD/AC=DE/BC,即AC·DE=AD·BC②,将①+②得:AC·BE+AC·DE=AB·CD+AD·BC,∴AC·BD≤AC(BE+DE)=AB·CD+AD·BC即AC·BD≤AB·CD+AD·BC,当且仅当A、B、C、D共圆时取到等号.托勒密定理在中考题中的应用托勒密定理在中考题中的应用(1)当△ABC是等边三角形时,如图1,当点D在弧AC上时,根据托勒密定理有:AC·BD=AB·CD+AD·BC,又等边△ABC有AB=AC=BC,故有结论:BD=AD+CD.证明:在BD上取点E使得DE=DA,易证△AEB∽△ADC,△AED∽△ABC,利用对应边成比例,可得:BD=AD+CD.如图2,当点D在弧BC上时,结论:DA=DB+DC.【小结】虽然看似不同,但根据等边的旋转对称性,图1和图2并无区别.(2)当△ABC是等腰直角三角形,如图3,当点D在弧BC上时,根据托勒密定理:AD·BC=AB·CD+AC·BD,又AB:AC:BC=1:1:根号2,代入可得结论:根号2AD=BD+CD.如图4,当点 D在弧AC上时,根据托勒密定理:AD·BC=AB·CD+AC·BD,又AB:AC:BC=1:1:根号2,代入可得结论:BD=根号2AD+CD.(3)当△ABC是一般三角形时,若记BC:AC:AB=a:b:c,根据托勒密定理可得:a·AD=b·BD+c·CD.02中考题中的托勒密定理2019仙桃中考2019威海中考2017临沂中考2016淮安中考来源:有一点数学,作者:刘岳。
基于DVB-T2的旋转星座解映射算法及其改进
【 K e y w o r d s 】 c o n s t e l l a t i o n r o t a t i o n ; d e m a p p i n g ; s o t f i n f o ma r t i o n
D V B - T 2 标 准作 为新一代欧洲数字视频 广播标 准 , 采 块 , 该模块位 于 比特 交织 和单元 交织 之间 。例 如 图 1 ,
【 A b s t r a c t 】C o n s t e l l a t i o n r o t a t i o n a s a d i v e r s i t y t e c h n o l o g y o f n e w c o n c e p t i n t h e i f e l d o f b r o a d c a s t a n d c o m m u n i c a t i o n i s u s e d i n D V B — T 2 s t nd a a r d . T h e
p r o i n g f r o m t h e a s p e c t s o f BER p e r f o r ma n c e a n d c o mp u t a t i o n c o mp l e x i t y . Th e s i mu l a t i o n r e s u l t s s h o w t h a t un d e r b a d c h a n n e l c o n d i t i o n s,i mp r o v i n g me t h o d s o n t h e p e fo r m a r n c e i s be t t e r t h a n t h a t o f t he o r i g i n a l s y s t e m.
旋转原理与常见结构结论
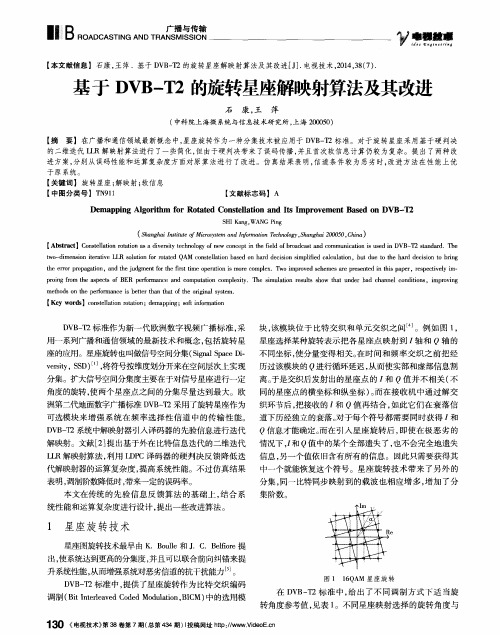
旋转一、基础知识1、旋转本质:图形的旋转本质上是图形上的点在同心圆上作同步运动2、旋转三要素:旋转中心、旋转方向、旋转角度3、旋转的性质:全等形:旋转前后图形全等;等腰:对应点到旋转中心的距离相等;(旋转出等腰,等腰可旋转)旋转角:对应点到旋转中心所连线段所成的角等于旋转角;(对应射线所成的角等于旋转角)二、旋转基本型1、手拉手条件:OA=OB,OC=OD,∠AOB=∠C0D=α结论:①△OAC≌△OBD;②OP平分∠APD;③OABP四点共圆,OPCD四点共圆(1)90°——90°(同向手拉手,异向婆罗摩笈多)婆罗摩笈多结论证明:(2)45°——45°同向旋转相似,对向中点得等腰RT证法一:中线倍长证法二:中位线证法三:构手拉手旋转全等(3)60°——60°2、夹半角旋转全等+翻折全等内半角(1)30°——60°(2)45°——90°(3)60°——120°外半角(4)150°——300°(5)135°——270°3、对角互补邻边相等4、三线共端点已知:AB=AC;PA=a,PB=b,PC=c;∠APB=α、∠APC=β、∠BPC=θ;(1)等边三角形为载体(2)等腰直角三角形为载体(3)120°等腰三角形为载体利用旋转,将α、β、θ和载体等腰三角形的顶角以及三线a、b、c放在同一个三角形(△PCE)中,然后解△PCE①知三求三②知两角求边比;知两边求第三边最值(三边关系、瓜豆原理);知一边一角求一边最值和另外两边比值的最值③知一角求边比值的最值一般地,等腰△ABC顶角为x°,底角为y°,底边与腰长比值为k PA=a,PB=b,PC=c;∠APB=α、∠APC=β、∠BPC=θ;(1)点P在底外(2)点P在腰外(3)点P在形内。
旋转的性质及应用
例2、在四边形 、在四边形ABCD中,AB=BC,∠ABC=∠CDA=90°, 中 , ∠ ° BE⊥AD于点 ,四边形 于点E,四边形ABCD的面积为 ,求BE的长 的面积为4, ⊥ 于点 的面积为 的长
解: 点逆时针旋转90° 将△BAE绕B点逆时针旋转 °, 绕 点逆时针旋转 得△BCE′ ∴ △BAE ≌ △BCE
B E′ B
C
F
C
A
E
D
A
E 试试自己写过程,相 信你一定行
D
(变式)在四边形ABCD中,∠B+∠D=180°, 变式)在四边形 中 ∠ ° AB=AD,AC=1,∠ACD=60°,则四边形 ∠ ° 则四边形ABCD 3 的面积为 。
4
A
B D B′
C
如图: 三点共线,已知AB=AD AB=AD, 如图:A、C、E三点共线,已知AB=AD, ACB=∠ACD,求证: ∠ACB=∠ACD,求证:BC=DC
C F
∵BC∥DF ∴ ∠DFE= ∠ CBE ∵ ∠A+ ∠ABE=90° ∠ABE+ ∠CBE =90° ° ° D A ∴ ∠A=A∠DFEE ∴ △ABE≌△FDE ≌ AE=a 设BE=x 则 (x-a)x+ax=4 ) x=2 ∴
E
D
(法三)
在四边形ABCD中,AB=BC,∠ABC=∠CDA=90°, 在四边形 中 , ∠ ° BE⊥AD于点 ,四边形 于点E,四边形ABCD的面积为 ,求BE的长 的面积为4, ⊥ 于点 的面积为 的长
祝各位专家、同仁每天都快快乐乐! 祝各位专家、同仁每天都快快乐乐!
B E′
∵ ∠ABC=∠CDA=90°,∴∠ ∠BCD=180° ∠ ° ∴∠A+∠ ° +∠BCD=180° D、C、E′三点共线 即∠BCE′+∠BCD=180° ∴D、C、E′三点共线
enigma原理
enigma原理Enigma机是在二战期间由纳粹德国研发并使用的一种密码机。
它采用了机械化的方案,通过电气原理完成加密和解密操作。
Enigma机的原理非常复杂,包括了多个旋转轮和反射器等,下面将详细介绍Enigma机的原理简化版本。
Enigma机的核心是一组可旋转的转子(Rotor),这些转子上印有字母和插线板的替代电路连接。
转子上的字母和插线板的连接方式是通过多种方式固定的,这种方式可以更改通讯过程中字母的映射关系,从而改变加密结果。
Enigma机中最早的版本采用了三个转子,每个转子上印有26个字母。
转子在加密或解密过程中会不断旋转,确保每次按下一个键时,转子位置都会发生变化。
这样,将同一个字母可能加密成不同的字母,增加了加密的难度。
在加密或解密的过程中,所输入的明文通过键盘输入,然后通过插线板得到它的插线板映射值,再通过进入第一个转子的映射,最后通过转子出口获得加密字符。
这个字符再经过反射器得到反射字符,然后再通过转子返回映射,最后通过插线板获得加密字符。
转子在使用过程中,通过每次输入一个字符后旋转一次,以确保每一个输入字符的映射都不一样。
Enigma机的解密过程与加密过程相反。
通过输入加密过的字符,经过插线板、转子、反射器等步骤进行运算,最终得到解密字符。
在Enigma机中,加密和解密是完全相同的操作。
这意味着,只需要将一个密文输入Enigma机,再按下相应的按键,就可以得到明文。
Enigma机的安全性很高,主要是由于以下几个原因:1.复杂的映射关系:Enigma机通过转子和插线板的映射关系,实际上每个字母相当于经过了多次替换。
这使得破译者难以通过简单的替换来猜测字母的真实映射关系。
2.转子的旋转:Enigma机中的转子在加密和解密过程中会旋转,这决定了每次按下一个键时映射的变化。
这种旋转功能使得破译者无法通过统计分析来猜测转子的位置。
3.插线板的改变:Enigma机的插线板连接方式可以根据需要进行更改,这意味着通讯双方可以通过约定的方式不断地改变Enigma机的加密方式,从而增加了破译难度。
第四节 分式线性映射
1 所以当z在单位圆内 (外 )时w 在单位圆外 z 图7-16 1 (内),当z在上(下 )半平面时w 在下(上 )半 z dw 1 1 平面,当z 0时 2 0, 所以当z 0时反演映射w dz z z 是共形映射, 如果规定两条伸向无穷 远点的曲线在无穷远 1 点的交角等于它们由反 演映射w 所映成的过原点 w0 z
的任一圆周K '都与 '正交.设K '的原像为K ,由性质2知它 是z平面的圆周通过点 z1与z2 ,因z1与z2 关于圆周对称, 故 由引理知K与正交, 又因分式线性映射具有 保角性, 故它 们的像K 与 也正交, 再由引理知w1和w2 关于 对称.
' ' '
把性质3说成分式线性映射具有 保对称性.
今后将把图7 16(a )这样由两圆弧围成的区 域称为" z 二圆域" ,因此根据边界对应原理 ,w k 把二圆域 z 映射为顶点在原点的角 形域.此外还应注意,因为直线段 被看作扩充复平面的圆 弧, 所以诸如半圆内部或半 圆外 部等也是二圆域.
例2 : 中心分别在z 1与z 1, 半径为 2的二圆弧所 zi 围成的区域(图7 17), 在映射w 下映成何区域? zi [解 ] 所设两个圆弧的交
a b a1 b1 a2 b2 c d c d c d 1 1 2 2 因此 ad bc (a1d1 b1c1 )(a2d 2 b2c2 ) 0.
(4.3)
定理1 分式线性映射(4.1)可由平移、 旋转、 伸缩和反 演四种变换复合得到 , 分式线性映射的复合仍 为分式线 性映射.
第六章6.3分式线性映射
三、分式线性映射的几种特性
3、保对称点性
定理 设点 z1, z2关于圆周 C 对称,则在分式线性映射下,它们
P150 定理
的象点 w1, w2也关于象曲线 C 对称。
6.7
O z1 C
z2 Γ Γ
O w1 C
Γ w2 Γ
21
四、唯一决定分式线性映射的条件
分析 分式线性映射 w az b 中含有四个常数 a , b , c , d . cz d
6.3 则称 A 和 B 是关于圆周 C 对称的。
自然地,规定圆心 O 与无穷远点关于该圆周对称。
7
二、分式线性映射的分解
4. 反演(或倒数)映射
w
1 z
令 z | z |ei ,
则有
w
到
单位圆外(或内),且辐角反号。
结论
w
1 z
是单位圆周对称映射与实轴对称映射的复合。
zi
解
方法一 分解为四种简单映射
πi
w 2 2e 2
1
.
zi
1
πi
z zi
平移
z1
z1 倒数
z2
e 2 z2
旋转
z3
2z3 相似
z4
z4 2 平移
w
i
πi
e 2 z2
旋转
2i
zi 平移
2z3 相似 1
1 z1
倒数
z4 2 平移
2i 1
12
例 求直线 C {z : Imz 1} 在映射 w 2z 下的像曲线。 zi
P146 定理6.5
注意 该定理不仅从理论上确保了分式线性映射是共形映射,
而且其中的保角性在分式线性映射的构造中非常实用。
从定义出发给出旋度公式的推导
从定义出发给出旋度公式的推导旋度,也称为旋量或涡度,是矢量场在给定点上的旋转程度的量度。
在物理学中,旋度是一个重要的概念,用于描述流体力学、电磁学、场论等多个领域。
为了推导旋度的公式,我们需要先了解矢量场的微分运算。
设有一个矢量场F(x,y,z)=P(x,y,z)i+Q(x,y,z)j+R(x,y,z)k,其中i,j,k是标准的基本矢量(单位矢量)。
矢量场的微分运算包括梯度、散度和旋度。
其中,梯度用于描述矢量场的变化率和方向,散度用于描述矢量场流动的源和汇,而旋度则用于描述矢量场的旋转性质。
推导旋度的公式可以分为两个步骤来完成。
首先,我们要推导旋度在直角坐标系中的形式,然后,我们可以利用坐标变换的方法将结果推广到曲线坐标系中。
1.直角坐标系中旋度公式的推导:我们首先考虑矢量场在坐标轴方向上的微小闭合环路上的线积分:∮ F·dr = ∮ (Pdx + Qdy + Rdz)·(dx, dy, dz)转化为参数方程形式:∮ (Pdx + Qdy + Rdz)·(dx, dy, dz) = ∮ Pdx*dx + ∮ Qdy*dy + ∮ Rdz*dz由于dx,dy和dz都是自变量,所以可以将微分项相乘扩展为求和形式,进一步展开上式:∮ Pdx*dx + ∮ Qdy*dy + ∮ Rdz*dz = ∮ Pdx*dx + ∮ Pdy*dy + ∮ Pdz*dz + ∮ Qdx*dx + ∮ Qdy*dy + ∮ Qdz*dz + ∮ Rdx*dx + ∮ Rdy*dy + ∮ Rdz*dz其中,我们利用了对称性质dx·dx=dy·dy=dz·dz=0。
我们可以将上式中的每一项根据微分的定义进行化简,得到:∮ Pdx*dx + ∮ Qdy*dy + ∮ Rdz*dz = ∮ (∂P/∂y - ∂Q/∂x)*dy*dx + ∮ (∂R/∂x - ∂P/∂z)*dz*dx + ∮ (∂Q/∂z - ∂R/∂y)dz*dy根据格林公式,上式可以进一步化简为:∮ Pdx*dx + ∮ Qdy*dy + ∮ Rdz*dz = ∫∫ (∂R/∂y - ∂Q/∂z)dS上式右边是一个二重积分,描述了矢量场沿闭合曲线的环绕程度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
旋转映射推导1 概 述旋转是一种常见的现象,最直观的就是日月星辰周而复始的运转;在科学研究中也不可避免的要接触到旋转,旋转实际上是一种运动的反应,我们更多的需要用运动的观点来分析旋转。
对于旋转的研究必须选好坐标系,只有在一定的坐标系中来描述旋转才有意义,研究旋转可以从两个方面入手,一方面是研究一个动点的坐标与这个点绕定坐标系中的某个定点(或者定轴)旋转一定的角度后的坐标之间的映射关系,另一个方面是点的位置保持不变,将坐标轴旋转一定的角度后到一个新的坐标系,这个不动点在新旧的坐标系下坐标之间的映射关系。
按照相对运动来考虑这两个方面,实际上是统一的,只要找到了其中一个的映射,另一个就是其逆映射,也可表述为正向旋转一个点等同于逆向旋转坐标轴。
要得到旋转的坐标映射关系,有多种方法。
本文中将用四种方法来推导、描述这种映射关系。
它们分别是几何法、复数运算法、变换法、四元数法。
其中几何法主要是将直角坐标系中的问题转化到极坐标系下并使用三角公式;复数运算法将平面直角坐标系看作一个复平面,利用复数乘积的特性来得到映射关系;变换法主要利用的是基变换和坐标变换的关系;四元数法直接对于三维矢量的旋转进行描述,且文中对于四元数的一些基本的概念进行了阐释。
2 几何法xY图1 点旋转定坐标系如图1所示,M 点在坐标系xoy 中的坐标为(,)x y ,将M 点绕坐标原点o 旋转()rad β到N ,求N 在坐标系xoy 中的坐标(',')x y 。
可将这个问题转化为极坐标下来解决,设oM与ox 的夹角为α,其长度为r ,有:cos sin x r y r αα=⎧⎨=⎩(1) 'cos()cos cos sin sin cos sin 'sin()sin cos cos sin cos sin x r r r x y y r r r y x αβαβαβββαβαβαβββ=+=-=-⎧⎨=+=+=+⎩ (2)即可得到旋转映射关系:'cos sin 'sin cos x x y y ββββ-⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦(3)XY图2 点静止旋转坐标轴如图 2 所示,将坐标系xoy 绕坐标原点逆时针旋转β后得到新的坐标系''x oy ,M 点在坐标系xoy 中的坐标为(,)x y ,则根据相对运动(逆时针旋转坐标轴相当于顺时针旋转点),将(3)式中的β取为β-,即可得M 点在坐标系''x oy 中的坐标(',')x y 为:'cos sin 'sin cos x x y y ββββ⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦(4) 对于二维平面中的旋转,用几何法可以很直观的给出坐标映射关系,本文推导的都是绕远点旋转的映射关系,如果不是绕原点旋转,只需要再做一下平移变换即可,这里不再赘述。
3 复数运算法我们称2 (1) ,z x yi i x y R =+=-∈为复数,这样一个复数可由一对有序实数(,)x y 唯一确定,所以对于平面上给定的直角坐标系,复数全体与该平面上的点的全体构成一一对应关系,所以复数z x yi =+可以用该坐标系坐标为(,)x y 的点来表示,利用直角坐标与极坐标的关系有:cos ,sin x r y r θθ==这样我们可以把复数z 表示成下面的形式:(cos sin )z r i θθ=+ (5)利用欧拉公式还可以表示成:i z re θ= (6)其中r 称为复数的模,θ称为复数的幅角。
复数的这几种表示方式可以互相转换。
对于复数的乘法运算,我们利用(5)式的复数表示方法,设有两个复数11112222(cos sin ),(cos sin )z r i z r i θθθθ=+=+则有:121211221212121212121212(cos sin )(cos sin )[(cos cos sin sin )(sin cos cos sin )] [cos()sin()]z z r r i i r r i r r i θθθθθθθθθθθθθθθθ=++=-++=+++ (7) 由上式可得 两个复数乘积的模等于它们模的乘积,两个复数乘积的幅角等于它们幅角的和。
那么,我们用一个复数乘以一个模为1,幅角为β的复数,就相当于将复数代表的点绕坐标原点逆时针旋转β弧度。
设M 点的坐标为(,)x y ,则M 对应一个复数z x yi =+,将M 绕坐标原点逆时针旋转后的点N 的坐标为''(,)x y ,用数学运算表达为:''()(cos sin )N x y i x yi i ββ=+=++=cos sin (sin cos )x y x y i ββββ-++即可得到旋转映射为:'cos sin 'sin cos x x y y ββββ-⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦(8) 同样也可以利用相对运动的观点得到点静止而旋转坐标轴的旋转映射关系。
4 变换法图3 基变换与坐标变换如图3所示,将直角坐标系xoy 逆时针旋转β角,得到坐标系111x o y ,设点M 在xoy 中的坐标为(,)x y ,点M 在坐标系111x o y 中的坐标为11(,)x y ,选xoy 的一组基底为Tl =[ij] ,111x o y 的一组基底为[]T111l =i j, 1=11i =j =i =j ,如图3所示,有如下:cos cos()cos sin 2πββββ⋅⋅=+-=+111i =(i i)i +(i j)j i j i j (9)cos() cos sin cos 2πββββ⋅⋅=++=-+111j =(j i)i +(j j)j i j i j (10)可得到基变换公式:cos sin cos sin sin cos sin cos ββββββββ⎡⎤⎡⎤⎡⎤⎡⎤==⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦⎣⎦111i i l =l j j(11) 令cos sin sin cos ββββ⎡⎤=⎢⎥-⎣⎦βT ,有-1β1l =T l 有了上述基变换公式就可以得出坐标变换公式[][]xy x y ⎡⎤⎡⎤=⎢⎥⎢⎥⎣⎦⎣⎦1-1β1i i T j j (12)即在M 在坐标系111x o y 中的坐标为[]x y -1βT11cos sin sin cos x x y y ββββ⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦ (13) 此处得到的旋转映射和前面两种方法得到的旋转映射结果完全一样,对于三维的旋转,可以通过连续绕坐标轴旋转的方式得到。
5 四元数法5.1 四元数的定义与基本运算性质设:,,,q a b c d a b c d R =+++∈i j k (14)其中,,i j k 满足: 2221===-i j k ij =-ji =k,jk =-kj =i,ki =-ik =j则称q 为四元数,其中a 为四元数q 的实部或者标量部分,记为Re()q a =;b c d ++i j k 为四元数q 的虚部或者矢量部分,记为Im() q b c d =++i j k 。
类似于复数用一个有序数对表示,我们也可以用用四维有序数对(,,,)a b c d 来表示四元数q 。
四元数的集合可以表示为:{}|,,,Q a b c d a b c d R =+++∈i j k (15)有了上面的四元数的基本定义,我们继续介绍四元数的基本运算 设两个四元数11111q a b c d Q =+++∈i j k 22222q a b c d Q =+++∈i j k定义四元数的相等:1212121212,,,q q a a b b c c d d =⇔====定义四元数的加法:1212121212()()()()q q a a b b c c d d +=+++++++i j k 定义四元数的乘法,称为直乘,按照多项式的乘法原则进行:1212121212121212121221212112121212() () () ()q q a a b b c c d d a b b a c d d c a c a c b d d b a d d a b c c b =---+++-+++-+++-i j k定义四元数1q 的共轭1q11111q a b c d =---i j k对于任意四元数 q a b c d Q =+++∈i j k ,定义q 的矩(或者称为范数)为:2222()N q qq a b c d ==+++对于任意四元数 q a b c d Q =+++∈i j k ,定义q 的迹为:()2T q q q a =+=对于任意四元数 q a b c d Q =+++∈i j k ,定义q 的模为:q ===基于上面的定义容易验证,1212q q q q +=+,1221q q q q =,四元数的加法满足结合律和交换律,乘法满足结合律,乘法对加法满足分配律,但乘法不满足交换律。
设q Q ∈,若存在p Q ∈,使得1pq qp ==则称四元数p 为四元数q 的倒数或者逆元,记为1q -,即有:111qq q q --==四元数q 存在倒数的充要条件是0q ≠,且q 的倒数1q -是唯一的,并满足:12q q q-=5.2 四元数的表示5.2.1 四元数的三角形式表示设 q a b c d Q =+++∈i j k ,且其中,,b c d 中至少有一个不为零,则:=()()q a b c d b c d a h h h h a h b c d q q q hh h =++++++⎡⎤=+++⎢⎥⎣⎦i j k i j k i j k即: ()q q u v =+I 其中:a u q ==h v q ==b c dh h h=++I i j k 易知:221u v +=,21=-I从而 (0)q a b c d Q bcd =+++∈≠i j k 可以写成如下的三角形式(cos sin )q q θθ=+I (16)()v atan atan u θ== (17)5.2.2 四元数的复数表示设 q a b c d Q =+++∈i j k ,注意到ij =k ,则q 可唯一表示为:()()q a b c d =+++i i j (18)于是令12,()z a b z c d =+=+i i ,则q 可唯一表示为:21212,,1q z z z C z C =+∈∈=-jj (19)5.2.3 四元数的数量-向量表示设 q a b c d Q =+++∈i j k引入表示法: q s =+α (20) 则s a =,b c d =++αi j k ,s 称为q 的数量部分,α称为q 的向量部分。