门式起重机柔性支腿稳定性分析
起重机的柔性腿和钢性腿

起重机的柔性腿和钢性腿如何区别刚性支腿和柔性支腿都只是一种假设,具体可见《起重机金属结构》一书。
区别看支腿与主梁连接处的支腿截面,截面大的是刚性支腿,截面小的是柔性支腿。
1楼讲的“与主梁是铰点联接的是柔性支腿,刚性联接的是刚性支腿。
”意思是从结构的节点的刚度来区分的方法,并不代表铰点联接就一定是铰轴。
7楼的怀疑“哪有主梁与支腿是铰点联接的?”是没有根据的,确实有柔性支腿与主梁之间采用铰轴连接的。
我过去设计过一台“5t×40m箱型装卸桥”的柔性支腿与主梁之间就是采用铰轴连接的。
4楼的“螺栓联接也属于刚性联接”不准确,对于柔性支腿与主梁之间不采用铰轴连接时,有采用焊接的、也有采用螺栓联接的。
柔性腿是两力杆,只受压,通常较细,采用铰轴连接。
刚性腿受弯压组合作用,通常截面是下小上大,刚性连接。
刚性腿为双向压弯构件,可以承受门架平面和支腿平面两个方向的弯矩,而刚性腿只承受支腿平面内的弯矩.通常刚性腿与主梁采用则刚性连接,柔性腿与主梁采用柔性联接。
两者之间是没有一个明确的界定,一般来说是相对而言吧,门式起重机承重时,支腿下部一般是门架方向向外偏移,车轮内侧面与轨道之间的间隙大多也就是15mm左右吧,如果两支腿刚度一样大,而主梁刚度较弱,特别是当跨度较大时,承重状态甚至空载时,两支腿的偏移引起下横梁的偏移值可能会大于那个间隙值,从而出现啃轨现象,因而当起重机跨度较大时,常吧一边支腿设计成柔性支腿,用支腿本身的弯曲去减小下横梁的偏移量。
柔性腿就字面意思理解是不能承受变矩,因此一般用在大跨度门吊中,消除主梁挠曲变形和温度变化出现的啃轨现象。
柔性腿与主梁的基本连接方式有三种:螺栓连接、球铰连接、柱铰连接。
柔性腿与刚性腿在结构上的区别是:在龙门架平面,刚性腿一般做成上大下小的变截面型式,柔性腿是等截面型式;在支腿平面二者相同,均为上小下大型式。
本人所说的支腿结构型式是对U型门吊而言,希望对楼主有用。
一般起重机跨度大于35m时,支腿采用一刚一柔结构,目的是在主梁承载时减小大车对轨道横向推力,从而降低啃轨几率;所谓柔腿结构,可以为真正的铰接(主梁与支腿连接采用球铰或柱铰),也可以为假想铰(主梁与支腿线刚度比之比较大),其目的是相同的。
超高门式起重机有限元分析及抗倾覆稳定性计算
要保 证 门机在 满载 工作 状态 和空 载非 工作 状态
下 结构 安全 可靠 , 须对 其 在 各 状 态 下 的结 构 强 度 必
及 稳定 性 进 行 分 析 校 核 。 由 于 起 重 机 结 构 的 复 杂
性 , 用传 统手 工计 算 很 难 得 到 准 确 的强 度分 析计 应
Ab ta t The lfi i fg nt yc a e i 0 m , hih i ow i g e e t don t el w ie rd e ho — — src : itng heghto a r r n s 5 w c sn ben r c e he y lo rv r b igeofD z u Da
S M ie , ss M u tp e s c o p i t l l e t n o n s i i
贴合 , 故支 腿 底 部 在 X 方 向的平 动 被 约束 ; )由于 2 车 轮 与轨道 之 间不 允 许 有 相 互 脱 离 , 支 腿 底部 端 故 面 在 y 方 向的平 动被 约束 ; )由于支 腿在 承受 压力 3
新技 术新 工艺
21 0 2年
第 8期
超 高门 式起 重机 有 限元 分析 及抗 倾 覆稳 定性计算
张 莹洁 , 永 前 , 翠 兰 , 齐 代 高艳 东
( 中铁 一 局 集 团 建 . 机 械 有 限公 司 , 西 西 安 7 0 5 ) T - - 陕 1 0 4
摘
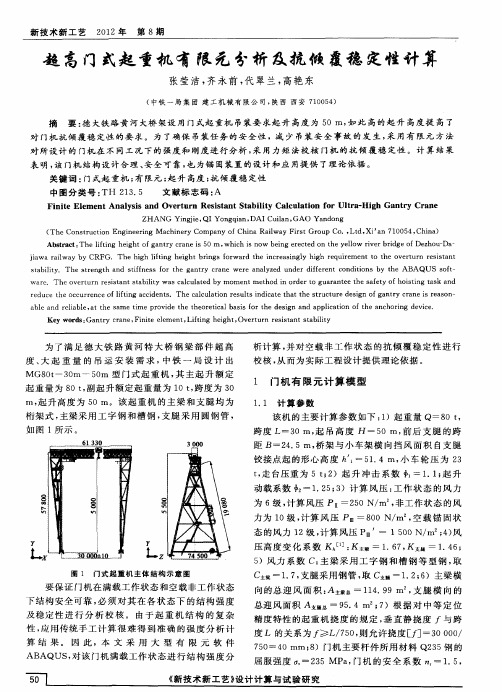
要 : 大铁路 黄 河 大桥 架设 用 门式起 重机 吊装要 求起 升 高度 为 5 l如 此 高的起 升 高度 提 高 了 德 0 r, f
龙门式起重机的结构设计与性能优化分析
龙门式起重机的结构设计与性能优化分析龙门式起重机是一种常见的大型起重设备,广泛应用于港口、工地、仓库等场所。
在结构设计和性能优化方面,龙门式起重机需要综合考虑其承载能力、稳定性、工作效率和安全性等因素。
一、结构设计1. 主梁设计:主梁是龙门式起重机的主要承载结构,需要按照所需的起重能力和跨度进行合理设计。
主梁材料通常选择钢结构,高强度、刚性好,能够满足起重机的工作要求。
2. 支腿设计:龙门式起重机通常有两根支腿,支腿的设计需要考虑平衡起重机的重心,稳定机身。
支腿通常采用跨字式结构,可以提供更好的稳定性。
3. 提升机构设计:提升机构是起重机的核心部分,需要具备良好的承载能力和操作灵活性。
提升机构包括卷扬机、钢丝绳、滑轮等组成,能够提供可靠的起升功能。
4. 小车设计:小车是起重机上横移的装置,通常由电动机、行走轮、驱动机构等组成。
小车设计应考虑平稳移动、灵活操作和较大的承载能力。
二、性能优化分析1. 结构强度优化:通过材料选取和结构设计优化,提高起重机的结构强度和刚度,使其能够承受更大的起重能力和外力冲击。
2. 运动性能优化:通过优化起重机的运动机构,减小摩擦力和阻力,提高起重机的运动速度和精度,提高工作效率。
3. 能耗优化:采用先进的节能技术,如变频调速技术和能量回收技术,减少起重机的能耗,降低运营成本。
4. 安全性优化:加强起重机的安全保护装置,如限位器、断路器、防碰撞装置等,确保起重过程中的安全性。
5. 自动化控制优化:应用自动化控制系统,提高起重机的智能化水平,实现远程控制和自动化操作,降低人为操作错误的风险。
6. 维护性优化:设计起重机时,考虑易维修性和易保养性,减少故障发生的可能性,并方便维修和维护工作的进行。
结构设计和性能优化是龙门式起重机研发过程中重要的一环。
通过合理的结构设计和性能优化,可以提升起重机的承载能力、工作效率和安全性,满足不同场所的具体需求。
同时,结构设计和性能优化也应考虑可持续性发展的原则,采用环保和节能的设计理念,为工业发展和环境保护做出贡献。
单梁门式起重机支腿结构设计及静力学性能分析

其轮压计算公式为:
I G*+02( Q+Go )
(3)
式中,卩2为动力系数,0=1+0.0叫=1+0.01x7=1.07,取卩2=
11;Gx.为小车重量。G”=扌牛=葺驴=2963 kg,式中,Go为吊具
3.1门架起重机主梁引起的均布压力
门架起重机主梁自重引起的等效均布载荷由式1计算。
?j=<Pi?
着力有很大的联系,即:
PM
⑷
式中.P務为惯性力,/为粘着系数.取>0.15, V为轮压,计算
额定起升量 Q/t 8
最大起升高 度H/m 9
跨度L/m 18
表1单梁门式起重机的主要技术参数 起升速度 小车( m/min) V„J( m/min) V m/min)
7
(1)
式中为起冲击系数,查文献[5].取竹=l」;g为主梁自重引
起均布力。9=〒帚=6鹤电& =2205 N/cm,查阅文献[5],取主梁 厶+2厶| 18+2x5
质量 Gq=6300 kg,代入计算得,gj=^ig=l」x22.05=24.26 N/cmo
3.2小车车轮压力分析
门架起重机的单主梁小车有2个垂直车轮轮压:
o' = fGa "B(T;)
(5)
在本设计中,大车车轮总数为4,主动车轮数为2,代入计算
得主梁自重引起惯性力大小为:P :
fGe
B(S)
.黑 ―O.15X63OOX? _x9.8=3592.15 No
7.5x( 1-0.15x4^-)
(2) 货物和小车自重引起惯性力,令P:作用于牛处,有,P:
=f (Q+GM*)a =0.15x(8000+219+2963)x2.4x9.8 =5764 竹 N. 7.5x( l-0.15x^-)
门式起重机带缺陷柔性支腿的静力学分析
Ab s t r a c t :Wi t h t h e c u r r e n t l f e x i b l e l e g o f 3 0 0 t × 4 3 mA g a n t r y c r a n e a s a s t u d y o b j e c t .t h e m o d e l s o f t h r e e c r a c k i n g
a n d p a r a l l e l t o t h e d i r e c t i o n o f r e i n f o r c i n g r i n g i s t h e mo s t h a r mf u l t o t h e l e g ,w h i c h p r o v i d e s n e w me t h o d a n d t h e o r e t i c b a —
0 引言
门式 起 重 机 ( 以下 简 称 门机 ) 的 主 体 为 钢 结 构 。 由于长 期 频 繁 使 用 ,起 重 机 的结 构 件 和零 部
件在 某些 薄 弱 部 位 或 主要 承 载部 分 可 能 会 产 生腐
H y p e r me s h和 A B A Q U S ,主要 研究 柔 性 支 腿 的 裂纹
门式 起 重机 带 缺 陷柔 性 支 腿 的 静 力学分 析
刘敬 知 殷晨 波 李 东 博 2 1 1 8 1 6 南京工业 大 学机 械 与动 力工程 学院 南京
摘
要 :以在用的 3 0 0 t × 4 3 m A型 门式起重机 的柔性支腿为研究对象 ,建立 了柔性支 腿的 3种裂纹 缺陷模
大型造船门式起重机柔性腿安装出现拐点问题分析

台 门式起重 机 时 ,我们 发现柔 性腿直 线度 难 以保
图 1 6 o 造船门式起重机结构形式 ot
证 ,即在 柔腿上 部箱 体与 支腿之 间安 装接 口处产 生 拐点, 且很难调 整 , 给安装工作 带来很大难 度 。因此 , 通过 对起 重机柔 性腿 结构特 点分 析 ,找 出在 安装过
程 中产生 拐点 的原 因 , 出一 系列 解决措 施 , 功地 提 成
3 柔性腿安装产生拐点的原 因分析
主 梁采用两组 龙 门式塔架 提升 的安 装方案 , 在主 梁提升 到一定 的高度 后 , 刚性 腿 、 将 柔性腿 的上 部箱 体 与主梁连接 ,支腿是通过 铰链 与上 部箱 体连接后 , 随主 梁提升滑移就 位 的 , 图 2所示 。 如
处 现 对位和调整非常困难,腿 口 出 毒 后詈 罂 体 支 接 拐 :竺 圭 篡 很难将柔性腿调 点
,
图 主变计图 5 梁形算一 示 …
图中: G1 主梁重量; 一
G 一 刚性 腿 重 量 ; 2
直, 不利于保证柔性腿 的直线度要求 , 图 3 示。 如 所
4 解决措施
重工与起 重技术
HE AVY I DUS RI N T AL& HOI Ⅱ NG MAC N Y S HI ER
( 在安装时用全站仪跟踪检测, 4 ) 以验证此工艺 方法 的可行性 。
41 计算主梁变形的偏角 .
门架是采用两组龙门塔架式提升方案进行安装, 主梁在提升时, 主梁的一端固定有上下小车, 主梁两 端分别带有刚性腿及柔性腿与主梁固定连接部分。 主 梁在自重和上述载荷的共同作用下, 会产生一定的变
析了柔性腿的结构特点和组成形式 , 出了在安 装中产生 拐 找 点的原 因, 提出了相 应的解决措施 。
提梁机柔性支腿相关特点总结

提梁机柔性支腿相关特点总结梁场的布置情况与作业方式不同,此类起重机的跨度和起升高度也不同,为适应不同的要求结构形式也有差异。
提梁机多都采用箱形双梁,支腿采用A行结构,与主梁刚性连接。
为改善支腿的受力情况,支腿与主梁的连接也可采用一侧刚性,一侧为柔性的结构。
柔性支腿与主梁的连接,通常采用三种形式:(1)假想铰(2)球铰(3)圆柱铰。
老式设计一般用的是球铰,可用推力向心球面滚子轴承来实现。
这样,整个门架为一个静定系统,消除由吊重所产生的侧向推力;大车歪斜运行时静定门架系统的受力状态也比较明确。
随着近代大型结构分析软件的普遍应用,柔性支腿与桥架的连接,一般都采用假想铰,也就是一侧的支腿设计成柔性的结构国内门机是这样规定的《起重机械设计手册》中对于跨距大于35米的龙门式起重机,为了补偿主梁变形对起重机的影响,将门式起重机的支腿作成一边是刚支腿,一边是柔性支腿。
这样的门式起重机最大跨距可达200米。
但是国外门机不论跨距大小都是一边是刚支腿,一边是柔性支腿.设计成一刚一柔可以较好的解决啃轨现象,柔性腿通常是做成铰接结构,释放掉弯矩,刚性腿单独承受水平力产生的弯矩,通常较粗1,补偿主梁在制作和使用当中产生的变形对起重机的影响;2,补偿大车行走中不同步而引起的大车车轮啃轨现象;3,补偿起重机行走平行度不足的各种制造、安装机械误差。
之所以一刚一柔,这样设计最主要的原因是消除温度和钢板的延展性对起重机钢结构造成的影响主要目的是为了解决起重机大车运行时两侧不同步问题。
而引起的大车车轮啃轨现象;设计成一刚一柔可以较好的解决啃轨现象,柔性腿通常是做成铰接结构,释放掉弯矩,刚性腿单独承受水平力产生的弯矩,通常较粗。
我们研究支腿模型,对支腿进行抗倾覆稳定性校核。
提梁机机属于门式起重机,因为没有悬臂,只需演算横向(大车运行方向)工况(暴风侵袭)的自身稳定性[12][18]。
简化支腿模型如图:图3-1 支腿简化模型非工作状态下提梁机收到沿大车轨道方向的暴风侵袭。
起重机的柔性腿和钢性腿
起重机的柔性腿和钢性腿如何区别刚性支腿和柔性支腿都只是一种假设,具体可见《起重机金属结构》一书。
区别看支腿与主梁连接处的支腿截面,截面大的是刚性支腿,截面小的是柔性支腿。
1楼讲的“与主梁是铰点联接的是柔性支腿,刚性联接的是刚性支腿。
”意思是从结构的节点的刚度来区分的方法,并不代表铰点联接就一定是铰轴。
7楼的怀疑“哪有主梁与支腿是铰点联接的?”是没有根据的,确实有柔性支腿与主梁之间采用铰轴连接的。
我过去设计过一台“5t×40m箱型装卸桥”的柔性支腿与主梁之间就是采用铰轴连接的。
4楼的“螺栓联接也属于刚性联接”不准确,对于柔性支腿与主梁之间不采用铰轴连接时,有采用焊接的、也有采用螺栓联接的。
柔性腿是两力杆,只受压,通常较细,采用铰轴连接。
刚性腿受弯压组合作用,通常截面是下小上大,刚性连接。
刚性腿为双向压弯构件,可以承受门架平面和支腿平面两个方向的弯矩,而刚性腿只承受支腿平面内的弯矩.通常刚性腿与主梁采用则刚性连接,柔性腿与主梁采用柔性联接。
两者之间是没有一个明确的界定,一般来说是相对而言吧,门式起重机承重时,支腿下部一般是门架方向向外偏移,车轮内侧面与轨道之间的间隙大多也就是15mm左右吧,如果两支腿刚度一样大,而主梁刚度较弱,特别是当跨度较大时,承重状态甚至空载时,两支腿的偏移引起下横梁的偏移值可能会大于那个间隙值,从而出现啃轨现象,因而当起重机跨度较大时,常吧一边支腿设计成柔性支腿,用支腿本身的弯曲去减小下横梁的偏移量。
柔性腿就字面意思理解是不能承受变矩,因此一般用在大跨度门吊中,消除主梁挠曲变形和温度变化出现的啃轨现象。
柔性腿与主梁的基本连接方式有三种:螺栓连接、球铰连接、柱铰连接。
柔性腿与刚性腿在结构上的区别是:在龙门架平面,刚性腿一般做成上大下小的变截面型式,柔性腿是等截面型式;在支腿平面二者相同,均为上小下大型式。
本人所说的支腿结构型式是对U型门吊而言,希望对楼主有用。
一般起重机跨度大于35m时,支腿采用一刚一柔结构,目的是在主梁承载时减小大车对轨道横向推力,从而降低啃轨几率;所谓柔腿结构,可以为真正的铰接(主梁与支腿连接采用球铰或柱铰),也可以为假想铰(主梁与支腿线刚度比之比较大),其目的是相同的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
门式起重机柔性支腿稳定性分析李向东;夏明睿;梁章【摘要】This paper takes the flexible legs of a 300 t-43 m gantry crane as the object of study and analyzes the stability of the flexible legs by theoretical calculation and finite element simulation analysis.Its stability meets the requirement.The three factors of affecting the stability of the flexible legs (section properties,slenderness ratio and wall thickness) are actively explored and the law of affecting the stability of flexible legs is found.These provide the basis for door crane safety evaluation research.%以某工厂300t-43m门式起重机柔性支腿为研究对象,运用理论分析计算和有限元仿真分析2种方法对柔性支腿稳定性进行分析,校核了柔性支腿稳定性满足要求.对影响柔性支腿稳定性的3个因素(截面特性、长细比、壁厚)进行了积极探讨,找出影响柔性支腿稳定性因素的规律,为门式起重机安全评估研究提供依据.【期刊名称】《机械制造与自动化》【年(卷),期】2013(042)004【总页数】4页(P84-87)【关键词】门式起重机;柔性支腿;有限元分析;稳定性【作者】李向东;夏明睿;梁章【作者单位】江苏省特种设备安全监督检验研究院,江苏南京210003;江苏省特种设备安全监督检验研究院,江苏南京210003;江苏省特种设备安全监督检验研究院,江苏南京210003【正文语种】中文【中图分类】TH213.40 引言在实际工程中,由于间歇、重复、循环、频繁的起动制动的工作特点,易使得门式起重机发生局部失稳从而导致整机倾覆[1]。
考虑到门式起重机的柔性支腿长细比大于刚性支腿,当小车吊重承载在柔性支腿侧时,柔性支腿更容易发生压弯失稳事故[2-3]。
不同于传统的设计实验方法,将利用有限元法结合理论分析计算对柔性支腿的稳定性进行分析,校核了门式起重机柔性支腿的稳定性。
并对影响柔性支腿稳定的因素进行了研究,找出影响柔性支腿稳定性因素的规律。
1 柔性支腿稳定性理论分析计算柔性支腿截面参数特性如表1所示。
表1 柔性支腿截面参数特性S/mm2 Iz/mm2 Iy/mm2 Iyz/mm2 Ip/mm2 19 436.16 1.064 ×104 1.064 ×104 0 2.128 ×1010 R1/mm R2/mm ωz ωy σ/(N/mm2)650 662 1.15 1.28 235表中:S——构建的毛截面面积;Iz、Iy——截面对主轴的惯性矩;Ip——极惯性矩。
选取柔性支腿最为危险的工况进行计算,即上小车位于柔性支腿侧承载200 t,下小车运行距上小车12 m承载100 t起吊重物,此时柔性支腿承载压力为最大。
取距柔性支腿顶端0.45 L处为柔性支腿的危险截面,通过材料力学计算公式[4],求的柔性支腿一侧所受的压力sin 75°=1 417 500 N。
选取坐标系如图1所示,距原点为x的任意截面的挠度为ω,弯矩M的绝对值为Fω。
若只取压力F的绝对值,则ω为正时,M为负;ω为负时,M为正。
即M与ω的符号相反,所以M=-Fω图1 建立坐标系在门式起重机平面y-z平面内,危险截面的弯矩:在柔性支腿平面x-y平面内,危险截面的弯矩:由上面计算可知:F1=1 417 500 N,Myz=0.807 9×107N.mm,Mxy=2.462 1×107N·mm,R1=662 mmIz=Iy=1.064 ×1010mm2代入式(1)、式(2)进行计算:1)门式起重机y-z平面内2)柔性支腿x-y平面内由以上计算可知,柔性支腿承载的轴心力和弯矩均小于材料的许用应力,故柔性支腿在实际工况中不会发生整体失稳。
2 柔性支腿稳定性有限元分析采用Hypermesh软件对柔性支腿进行网格划分[5],选用20 mm shell单元,规定单元长宽比为1~3、翘曲角0°~10°、扭曲角55°~90°、雅克比率为 0 ~0.7,设定壳单元厚度为12 mm,共划分57 558个单元、93 626个节点。
设定物理参数:材料的弹性模量E=210 GPa,泊松比μ=0.3,密度ρ=7 917 kg/m3。
建立了柔性支腿有限元模型。
由于柔性支腿上的大车行走机构的约束主要是在车轮上,则按照使用的实际情况,车轮沿轨道方向(y)的位移约束放开,水平方向(x)和垂直方向(z)的位移约束要加上,在最端头一组车轮增加y向的约束,旋转约束全部放开。
柔性支腿承受的载荷有额定起升载荷PQ、上、下小车自重PG1、主梁自重PG2。
按照上面的约束和载荷,运用特征值求解方法[6],得出柔性支腿整体失稳的前六阶失稳模态,前六阶失稳模态振型如图2—图7。
图2 一阶失稳模态图7 六阶失稳模态通过前六阶屈曲模态云图可以知道,其失稳方式均为柔性支腿两边支撑柱的屈曲失稳,最容易失稳的第四阶、第五阶模态是柔性支腿的纵向失稳。
因为柔性支腿的上端与下端均为铰接,且纵向的有效长度最长,其一阶稳定性系数为λ=5.076 6,由此可见柔性支腿满足整体稳定性要求,满足设计要求。
3 柔性支腿稳定性影响因素研究通过改变支腿的截面特性、长细比、壁厚来研究影响整体稳定性的因素。
1)壁厚t变,截面外半径R2性支柱单侧长度l对整体稳定性的影响。
柔性支腿壁厚t不变,通过改变支腿截面的外半径R2,以及柔性支腿单侧长度l来研究对整体稳定性的影响程度,如表2所示。
表2 长细比对稳定性的影响R2/mm l/mm 长细比/λ稳定性系数/C 一阶屈曲模态662 38 092 57.5 5.076 立柱纵向630 38 800 61.6 4.832 600 39 500 65.84.051 570 40 300 70.7 3.321 540 41 000 75.9 2.943 510 41 800 81.9 2.224480 42 600 88.75 1.329弯曲450 43 400 96.5 0.781通过以上计算可以知道,改变构件的长细比对整体稳定性的影响是很大的,随着柔性支柱长度的增加,截面外半径的减小,柔性支腿的长细比越来越大,稳定性系数也越来越小,由于柔性支柱的一阶模态为纵向压弯,所以改变支腿的长度l更能影响整体稳定性。
从表中计算结果可知,当长细比λ由57.5升到96.5时,柔性支柱的稳定性由5.076直接降到0.781,发生整体性失稳。
2)长细比λ不变,壁厚t对整体稳定性的影响。
长细比λ不变,改变柔性支腿壁厚t,研究对柔性支腿稳定性的影响,如表3所示。
通过表3可知,随着板厚的增加,壁厚t由12 mm增加到30 mm时,稳定性系数平稳增长,由5.076增长到10.72,可以看出柔性支腿的稳定性不断在提升。
但是考虑到板厚变化所导致的毛截面积A的变化,继而影响毛截面本身所受的内应力,从而对稳定性系数有一定的影响。
可见,板厚通过改变自身的受力状况对于柔性支腿失稳的影响也是不能忽视的。
表3 壁厚对整体稳定性的影响R2/mm l/mm 壁厚t/mm 稳定性系数/C 一阶屈曲模态662 38 092 12 5.076 662 38 092 15 5.769 662 38 092 18 6.564 立柱纵向弯曲662 38 092 21 7.021 662 38 092 24 8.678 662 38 092 27 9.529 66238 092 30 10.72通过改变柔性支腿壁厚t,长细比λ,可以绘出影响因素与门式起重机稳定性系数C的曲线图,以此找出影响门式起重机稳定性因素的规律。
图8为长细比与稳定性系数的关系曲线图,图9为柔性支腿壁厚与稳定性系数的关系曲线图。
4 结语针对某工厂300 t-43 m门式起重机柔性支腿,通过理论分析计算得到柔性支腿所承载轴心力和弯矩小于材料的许用应力,利用有限元法分析得到柔性支腿前六阶稳定性系数,其中一阶稳定性系数为λ=5.076 6,从而校核了柔性支腿稳定性满足要求。
进一步通过改变支腿的截面特性、长细比、壁厚来研究影响柔性支腿稳定性的因素,可知柔性支腿的稳定性系数随着长细比的增大而减小,随着柔性支腿壁厚的增加而增大。
参考文献:[1]黄凯,张一辉,郑建荣.门式起重机在特殊危险工况下的安全性能分析和评价[J].计算机辅助工程,2011,20(2):108-112.[2]毕建平,刘建英.300ton×72mH45M门式起重机柔性支腿的有限元分析[J].制造业信息化,2012,5(1):47-51.[3]王大伟.几种大跨度装卸桥柔性支腿与箱形主梁联接的设计方案[J].港口装卸,1996,2(1):11-15.[4]马功勋,何玉梅,陈晔,等.工程力学[M].南京:东南大学出版社,2002. [5]李楚琳,张胜兰,冯樱,等.HyperWorks分析应用实例[M].北京:机械工业出版社,2008.[6]Whirley R G,Engelmann B E.DYNA3D:a nonlinear,explict,three-dimensional finite element code for solid and structural menchanics user manual.University of California Law rence Livemore National Laboratory,Rept UCRL-MA-107245,1993.1 ~40.。