理论力学L4-4 空间力系简化
合集下载
空间力系的简化
z
z 主矢,主矩
z
F1 M2
y x
F1
F2
M1
附加力偶 F'
R
A2
F2
0 An
M0 0 y
A1
0
y
Mn
Fn
x
x
Fn
O:简化中心
Fi 主矢: FR 主矩: M M M ( F ) 0 i 0 i
主矢是力系的第一不变量。
二、力系进一步简化的各种可能结果 1、 F 0 平衡力系,以后讨论 M 0 O R 与简化中心无关 合力偶 2、 FR 0 MO 0 合力 3 FR 0 MO 0 、 4 FR 0 MO 0 、 (1) F 合力 MO R FR FR
(MO rOA FR ) FR MO FR M A FR
主矢与主矩的点积也与简化中心的选择无关,称之为力 系的第二不变量 由主矢与主矩的点积是否为零,就可判定出简化的最终 是合力还是力螺旋。
特例:平面任意力系的简化
F1 A1 A2
FR
FR
o
MO
o
FR
d
o’
o
d
o’
MO 平移距离: d FR
平移方向: FR M O 的方向
(2)
FR
MO
M0
力螺旋
FR
FR 与 M O FR 与 M O
方向一致 右手力螺旋 方向相反
左手力螺旋
(3) FR 0, MO 0, FR MO
MO1
Fj 合力大小和方向: FR FR
1.133F a / F 1.133a 合力作用点D至A点距离:d M A / FR
z 主矢,主矩
z
F1 M2
y x
F1
F2
M1
附加力偶 F'
R
A2
F2
0 An
M0 0 y
A1
0
y
Mn
Fn
x
x
Fn
O:简化中心
Fi 主矢: FR 主矩: M M M ( F ) 0 i 0 i
主矢是力系的第一不变量。
二、力系进一步简化的各种可能结果 1、 F 0 平衡力系,以后讨论 M 0 O R 与简化中心无关 合力偶 2、 FR 0 MO 0 合力 3 FR 0 MO 0 、 4 FR 0 MO 0 、 (1) F 合力 MO R FR FR
(MO rOA FR ) FR MO FR M A FR
主矢与主矩的点积也与简化中心的选择无关,称之为力 系的第二不变量 由主矢与主矩的点积是否为零,就可判定出简化的最终 是合力还是力螺旋。
特例:平面任意力系的简化
F1 A1 A2
FR
FR
o
MO
o
FR
d
o’
o
d
o’
MO 平移距离: d FR
平移方向: FR M O 的方向
(2)
FR
MO
M0
力螺旋
FR
FR 与 M O FR 与 M O
方向一致 右手力螺旋 方向相反
左手力螺旋
(3) FR 0, MO 0, FR MO
MO1
Fj 合力大小和方向: FR FR
1.133F a / F 1.133a 合力作用点D至A点距离:d M A / FR
力系简化的基础知识课件
学仿真等。
05
力系简化的实例分析
平面力系的简化
总结词
平面力系简化的目标是将其化简为单一 的合力或若干个相互独立的力,以便于 分析和计算。
VS
详细描述
平面力系简化的方法主要包括力的合成与 分解、力的平移等。通过这些方法,可以 将平面力系简化为一个或几个独立的力和 力矩,从而简化分析过程。
空间力系的简化
03
力系简化的应用
静力学平衡问题
01 02
静力学平衡问题
力系简化在静力学平衡问题中有着广泛的应用。通过将复杂的力系简化 为简单的形式,可以更容易地分析物体的平衡状态,并确定支撑反力和 约束反力。
静力平衡方程
在静力学平衡问题中,力系简化可以帮助建立静力平衡方程。通过将力 系简化为一个或多个力的平衡,可以求解未知的力或位移。
力矩
力与力臂的乘积。力矩的作用效果是使物体绕某点旋转或产生转动效应。
力的向心力和离心力
向心力
物体做圆周运动时,受到指向圆心的 合力,称为向心力。向心力的大小与 速度和半径有关,方向始终指向圆心 。
离心力
物体做圆周运动时,受到远离圆心的 合力,称为离心力。离心力的大小与 速度和半径有关,方向始终远离圆心 。
力系简化的基础知识 课件
目录
• 力系简化的基本概念 • 力系简化的方法 • 力系简化的应用 • 力系简化的注意事项 • 力系简化的实例分析
01
力系简化的基本概念
力系简化的定义
定义
力系简化是指将复杂的力系通过 一定的方法简化为简单的力系, 以便于分析、理解和计算。
解释
力系简化是力学分析中的重要步 骤,通过简化可以更好地理解力 的作用方式和效果,简化计算过 程,提高分析效率。
05
力系简化的实例分析
平面力系的简化
总结词
平面力系简化的目标是将其化简为单一 的合力或若干个相互独立的力,以便于 分析和计算。
VS
详细描述
平面力系简化的方法主要包括力的合成与 分解、力的平移等。通过这些方法,可以 将平面力系简化为一个或几个独立的力和 力矩,从而简化分析过程。
空间力系的简化
03
力系简化的应用
静力学平衡问题
01 02
静力学平衡问题
力系简化在静力学平衡问题中有着广泛的应用。通过将复杂的力系简化 为简单的形式,可以更容易地分析物体的平衡状态,并确定支撑反力和 约束反力。
静力平衡方程
在静力学平衡问题中,力系简化可以帮助建立静力平衡方程。通过将力 系简化为一个或多个力的平衡,可以求解未知的力或位移。
力矩
力与力臂的乘积。力矩的作用效果是使物体绕某点旋转或产生转动效应。
力的向心力和离心力
向心力
物体做圆周运动时,受到指向圆心的 合力,称为向心力。向心力的大小与 速度和半径有关,方向始终指向圆心 。
离心力
物体做圆周运动时,受到远离圆心的 合力,称为离心力。离心力的大小与 速度和半径有关,方向始终远离圆心 。
力系简化的基础知识 课件
目录
• 力系简化的基本概念 • 力系简化的方法 • 力系简化的应用 • 力系简化的注意事项 • 力系简化的实例分析
01
力系简化的基本概念
力系简化的定义
定义
力系简化是指将复杂的力系通过 一定的方法简化为简单的力系, 以便于分析、理解和计算。
解释
力系简化是力学分析中的重要步 骤,通过简化可以更好地理解力 的作用方式和效果,简化计算过 程,提高分析效率。
理论力学4—空间力系

上式即为空间力偶系的平衡方程。
例2. 曲杆ABCD, ∠ABC=∠BCD=900, AB=a, BC=b,
CD=c, m2, m3 求:支座反力及m1=?
解:根据力偶只能与力偶平衡的性质,画出构 件的受力图见图示。约束反力ZA 和ZD 形成一 力偶, XA与XD形成一力偶。故该力系为一空间 力偶系。
3.3.2 力偶的矢量表示 由力偶的性质可知:力偶的作用效果取决于力偶矩 的大小、力偶转向和作用面方位。因此可用一矢量M表 示:选定比例尺,用M的模表示力偶矩的大小;M的指 向按右手螺旋法则表示力偶的转向; M的作用线与力偶 作用面的法线方位相同。如图所示。 M称为力偶矩矢。 力偶矩矢为一自由矢量。
[例] 图示传动轴,皮带轮直径D1=160mm,圆柱齿轮节圆直径 D2=240mm,T1=200N, T2=100N,=20°。 求:平衡时力P=?和轴承A , B的约束反力? 分析: T2 T1 P 20°
YA
x
z ZA
P Py
Pz
20°
YB
ZB
T2
Fabc a 2 b2 a 2 b2 c 2
[例] 已知:如图 所示,试求力F 对点A的力矩的大小。 分析: x
Ax Az
A d
Ay O
z Fx
3
F
4
d
d
Fy y
先将力分解,在对A点 三个轴取矩。 4 Fx F 0.8F 2 2 3 4
3 Fy F 0.6F 2 2 3 4
m2 my 0, m2 Z A a 0, Z A a m3 mz 0, m3 YA a 0, YA a mx 0, m1 bZ A c X A 0
理论力学第七版第四章空间力系

常见的空间力系示例
悬索桥
悬索桥是一种常见的空间力系示例,需要考虑多个力和 力矩的作用。
起重机
起重机是另一个常见的空间力系示例,用于进行吊装和 搬运工作。
空间力系的平衡条件和解题方法
1
ห้องสมุดไป่ตู้
平衡条件
空间力系平衡的条件是合力为零,合力矩为零。
2
解题方法
利用平衡条件和分析方法,逐步确定未知量的数值。
3
示例题目
通过解题方法解决具体问题,加深理解。
空间力系的应用和意义
空间力系的应用涵盖了各个工程领域,可以用于解决实际工程问题,提高工程设计的准确性和效率。
机械工程
用于机械结构的设计和分析,例如机械臂、传动系 统等。
建筑工程
用于建筑物结构的分析和设计,例如桥梁、楼房等。
航空航天
用于航空器和航天器的设计和分析,例如飞机、卫 星等。
海洋工程
用于海洋结构的分析和设计,例如海上平台、潜水 器等。
结论和要点
• 空间力系是由多个力或力矩组成的力的系统。 • 空间力系的力和力矩可以用矢量表示。 • 空间力系需要考虑多个力和力矩的分析和平衡条件。 • 空间力系广泛应用于各个工程领域,提高工程设计的效率和准确性。
复杂性
空间力系一般由多个力和力矩组成,分析较为复杂。
工程应用
空间力系广泛应用于工程力学、机械设计等领域。
空间力系的力和力矩分析方法
力的分析方法
将力分解为分力或合力分解,再 进行叠加得到结果。
力矩的分析方法
根据力对应的力臂和力的矢量关 系,计算力矩。
矢量计算法
利用矢量运算法则,对多个力和 力矩进行矢量计算。
理论力学第七版第四章空 间力系
理论力学 第4章 空间力系的简化和平衡

28
3
FR 0
M 0 FR M
FR
Mo
MO
FR
FR
FR
O’
oo M M
FR
FR
合力 o
如果一个力与一个力系等效,称该力是这个 力系的合力!
29
4 FR 0
5 FR 0
M 0
M 0
R // M
力螺旋 o
FR
垂直于z轴,圆盘面O2垂直于x轴,两盘面上作用有力偶,
F1=3N, F2=5N,构件自重不计,求A,B两处的约束反力。
解:取整体为研究对象。
Mx 0 Mz 0
20
§4-4 空间一般力系的合成与平衡
一,空间力系向一点的简化 把研究平面一般力系的简化方法拿来研究空间一般力系的
简化问题,但须把平面坐标系扩充为空间坐标系。 设作用在刚体上有
解:各杆均为二力杆,取球铰O为研究对象
Fix 0
Fiy 0
Fiz 0
10
§4-2 力对点的矩与力对轴的矩
一、力对点的矩的矢量表示 在平面中:力对点的矩是代数量。 在空间中:力对点的矩是矢量。
mO (F ) Fd 2AOB面积
如果r 表示A点的矢径,则:
T1 546(kN)
36
由B点:
X 0, T2cos cos45T3cos cos450
Y 0, T1sin60T2cos cos45T3cos cos450
Z 0, N2 T1cos60T2sin T3sin 0
cos 4 4, sin 3
力螺旋 o
空间力系简化与平衡2

S5 B1
z
C S4 S3 D 3 a S2 4 S1 2 C1
1
A1
x y
D1
a
a
∑ mDC ( F ) = 0 : S 6 a + S5 cos 45 a = 0 ⇒ S 6 = − P
∑ Z = 0 : − S1 − S 6 − S 3 − S 5 cos 45 − S 4 cos 45 − S 2 cos 45 = 0 ⇒ S1 = P + P − P − P + P = P
§3-6 重心
一、重心与计算公式
平行力系的合力为重力, 平行力系的合力为重力,重力作用线 必经的一点为物体的重心。 必经的一点为物体的重心。
28
由合力矩定理: 由合力矩定理:
PxC = ∑ ∆Px
z
M i ( xi , yi , zi )
− PyC = − ∑ ∆Py
将坐标绕x轴转过 90 ,由合力 将坐标绕 轴转过 O 矩定理(对 轴 矩定理 对X轴): yi
∑M
x
( Fi )i + ∑ M y ( Fi ) j + ∑ M z ( Fi )k
' FR = ∑ Fi' = ∑ Fi = ∑ X i i + ∑ Yi j + ∑ Z i k
′ FRx ′ FRy ′ FRz
—有效推进力 有效推进力 —有效升力 有效升力 —侧向力 侧向力 —滚转力矩 滚转力矩
∑X =0 ∑Y = 0 ∑Z = 0 ∑ M (F ) = 0 ∑ M (F ) = 0 ∑ M (F ) = 0
i i x i
y i z i
三、空间约束的类型举例
13
14
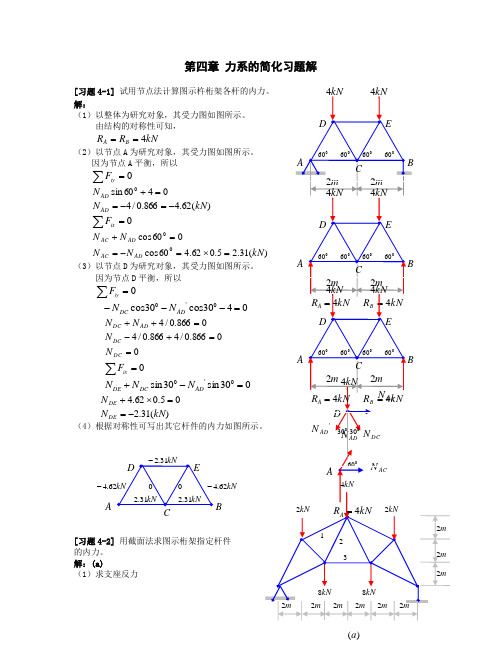
《理论力学》第四章 力系的简化习题解
解:
(1)确定悬索的形状
根据对称性,建立如图所示的坐标系。
由公式(4-6)得:
悬索的边界条件为: , , , 。
所以悬索线方程为:
悬索线的斜率:
边界条件:
故悬索线方程为:
(2)求
(3)求最大拉力
由公式 得:
(出现在A、B两点处)。
[习题4-12]输电线之两塔相距 ,塔顶高差 ,垂度 ,电线每米重 ,并假定沿水平跨度均匀分布,求最低点水平拉力及最大拉力。
最大静摩擦力,那 么圆轮水平向右滑动,不
发生滚动。在这种情况下,杆OC的受力图如
图(a)所示。
由OC的平衡条件得:
圆轮的力图如图(b)所示。
由圆轮的平衡条件得:
(2)如果A先达到最大静摩擦力,那么圆轮将
沿地面滚动。此时,
由圆轮的平衡条件得:
(3)如果B先达到最大静摩擦力,那么圆轮将沿OC滚动。此时,
所示。由AB的平衡条件得:
………(1)
………(2)
………(3)
(1)/(2)得:
当物块M靠近B端时,板AB的受力如图(b)
所示。由AB的平衡条件得:
………(a)
………(b)
………(c )
(a)/(b)得:
综合考虑图(a)、(b)两种情况下的 值可知, 的范围是 。
[习题4-22] 攀登电线杆的脚套钩如图所示。设电线杆直径 ,A、B间的铅垂距离为 。若套钩与电线杆之间摩擦因为 ,求工人操作时,为了安全,站在套钩上的最小距离 应为多大?
故悬索线方程为:
…………(3)
(3) 代入(2)得:
当 时, ,即:
。故悬索线方程为:
(2)确定水平力
当 时, ,即:
令
(1)确定悬索的形状
根据对称性,建立如图所示的坐标系。
由公式(4-6)得:
悬索的边界条件为: , , , 。
所以悬索线方程为:
悬索线的斜率:
边界条件:
故悬索线方程为:
(2)求
(3)求最大拉力
由公式 得:
(出现在A、B两点处)。
[习题4-12]输电线之两塔相距 ,塔顶高差 ,垂度 ,电线每米重 ,并假定沿水平跨度均匀分布,求最低点水平拉力及最大拉力。
最大静摩擦力,那 么圆轮水平向右滑动,不
发生滚动。在这种情况下,杆OC的受力图如
图(a)所示。
由OC的平衡条件得:
圆轮的力图如图(b)所示。
由圆轮的平衡条件得:
(2)如果A先达到最大静摩擦力,那么圆轮将
沿地面滚动。此时,
由圆轮的平衡条件得:
(3)如果B先达到最大静摩擦力,那么圆轮将沿OC滚动。此时,
所示。由AB的平衡条件得:
………(1)
………(2)
………(3)
(1)/(2)得:
当物块M靠近B端时,板AB的受力如图(b)
所示。由AB的平衡条件得:
………(a)
………(b)
………(c )
(a)/(b)得:
综合考虑图(a)、(b)两种情况下的 值可知, 的范围是 。
[习题4-22] 攀登电线杆的脚套钩如图所示。设电线杆直径 ,A、B间的铅垂距离为 。若套钩与电线杆之间摩擦因为 ,求工人操作时,为了安全,站在套钩上的最小距离 应为多大?
故悬索线方程为:
…………(3)
(3) 代入(2)得:
当 时, ,即:
。故悬索线方程为:
(2)确定水平力
当 时, ,即:
令
理论力学:空间任意力系的简化
O’
Od
O’
(A) FR 0, MO 0, FR MO (不过简化点O)
(B) FR 0, MO 0 (过简化点O)
3
理论力学
§2-3 空间一般力系简化
(2) FR 0, MO 0, FR MO
MO FR
O
M O1 FR
O MO2
力螺旋 (wrench)
M O1
FR
FR
o d O’
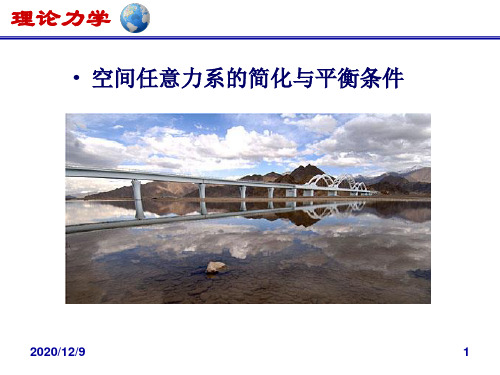
理论力学
• 空间任意力系的简化与平衡条件
2020/12/9
1
理论力学 BUAA
空间任意力系的简化
三、空间任意力系简化结果的讨论
空间任意力系 {F1, F2,, Fn} {FR , MO} 简化结果
1、 FR 0, MO 0 2、 FR 0, MO 0
平衡力系 合力 (过简化点O)
3、 FR 0, MO 0
F3
F2
F1 平面椭圆A
F1
F3 F5
F2
F4
正方体A
F3
F2
F1
平面椭圆B
F2 F3
F1
F5
F4 正方体B
6
理论力学
§2-3 空间一般力系简化
例:求力系{Fi}向O点简化的结果。
z
解:1、 Fi Fix i Fiy j Fiz k
ri xii yi j zik
F1
c
n
2、 FR Fi
0
M
A
1 2
ql 2
2020/12/9
19
理论力学
§2-4 各类力系平衡条件
例:重为W 的均质正方形板 水平支承在铅垂墙壁上,求 绳1、2的拉力, BC杆的内力
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
c ) 一般主矢和主矩矢既不平行也不垂直 由共点矢量知,它们在同一平面内, 假设两矢量正向夹角为α。 ' FR 1) 将 M O分解为垂直于 ' ' ' 的 及平行于 F M R MO MO O " 的 MO , ' ' O M O 的大小: " FR ' MO M O M O sin
' b) 若主矢平行于主矩:FR // M o
O
MO
' 由一个力和一个力偶(且力 FR 垂直于力偶作用面)组成的
力系,称为力螺旋。 力和力偶都是基本力学量, 力螺旋不能再简化。
力偶矩矢与力矢同方向的称为右螺旋(力偶的转 向与力的方向符合右手关系);反之称左螺旋。 但一般主矢和主矩矢既不平行也不垂直。
§4-4 空间任意力系向一点简化
一、空间任意力系向一点简化 与平面任意力系向一点简化相似,空间任意力 系也是利用力的平移定理将各力平移到简化中 心 O 处,并附加矢量表示的空间力偶,则原力 系与空间汇交力系+空间力偶系等效。
MO m m1 n
F2 F’2
F’R
O
F’n
Fn
F’1 m2
F 又由于力偶矩矢是自由矢量,再将平行于 的 R '' 力偶矩矢 M o 平行移动与FR 重合,成为力螺旋。 一般情况下,空间力系简化结果是一个力螺旋。
约束类型
约束反力
数量
空 间 约 束 类 型 和 约 束 反 力
3
4
5 6
MO
F’R
对于空间汇交力系的合 ' 力FR :
O
' FR 等于该力系各力的矢量和, 称其为该力系的主矢; 对于空间力偶系的合力偶,其力偶矩矢 M O等于 各附加力偶矩的矢量和,也是力系中各力对点O 力矩矢的矢量和: MO mi mO ( Fi ) 称为该力系对简化中心O点的主矩。
轴上的投影。
2 2 2 M O [ M O ]x [ M O ] y [ M O ]z
4)主矩大小: MO [ MO ]x i [ MO ]y j [ MO ]z k
由力对点矩矢量与力对轴之矩的关系:
[ MO ( F )]x M x ( F )
' FR 0 , MO 0,则需要作进 4. 若简化结果:
一步分析。
' a) 若主矢垂直于主矩:FR Mo MO ' Mo FR O d ' d FR FR ' O' M
O
最终可以简化为一个偏离简化中心 O 的合力。 偏离点o’ 到简化中心的距离 d 可计算出。
3)主矢的解析表达式:
' ' ' ' Fi FR FRx i FRy j FRz k
' ' 主矢投影:FRx Fxi FRy Fyi
(Fxi i F j F k ) yi zi (Fxi i) (Fyi j ) (Fzi k ) (Fxi )i (Fyi ) j (Fzi )k
力对点的矩矢量在通过该点之轴上的投影,等 于力对该轴之矩。
[ MO ]x [mO ( Fi )]x mx (Fi )
2 2 2 MO (m x ( Fi )) (m y ( Fi )) (mz ( Fi ))
空间约束例:三维固定端
Mo
F’R
' Fi Fi ' ' FR Fi Fi
结论:空间一般力系向任意一点O简化的结果 为一个力和一个力偶。该力等于该力系的主矢, 作用线过简化中心O;该力偶的矩矢等于该力 系对简化中心O点的主矩。
' 1) 主矢 FR Fi
(矢量),只与力系中各分力 矢量有关,与简化中心O的位置无关。 2) 主矩 MO mO ( Fi ) (矢量),与简化中心O 的位置有关,因为平移的距离不同。
c ) 一般主矢和主矩矢既不平行也不垂直 由共点矢量知,它们在同一平面内, 假设两矢量正向夹角为α。 ' FR 1) 将 M O分解为垂直于 ' ' ' 的 及平行于 F M R MO MO O " 的 MO , ' ' O M O 的大小: " FR ' MO M O M O sin
' ' ' ' 2) 因为力偶矩矢M O 垂直于主矢 FR : FR MO ' 逆用力平移定理,可将主 ' ' MO 矢 FR 与力偶矩矢 M O 一起 简化为作用于点 o’ 的一个 ' O " FR 力 FR ,两点的距离d: dM F
' O' MO
O
R
' M o M o sin d ' ' F FR R
F1
O点是任选的简化中心。 由力平移定理,将各力向 O点平移,附加力偶 mi , 空间任意力系等效变换成 一个空间汇交力系+ 一个空间力偶系。
空间汇交力系可合成为一个作用线过简化中心 ' O点的力 FR ; 空间力偶系可合成为一个空间力偶,该力偶矩 矢记为 M O ; 空间任意力系一般简化为一个力+一个力偶矩矢。
三维固定端约束处,有三个约束反力加上三个 约束反力偶,共有六个约束反力。
二、空间任意力系简化结果讨论 ' FR 0, Mo 0 ,则原力系简 1. 若简化结果: 化为一个空间力偶,此时主矩与简化中心 无关(力偶与矩心无关)。 ' 2. 若简化结果: FR 0, MO 0,则原力系简 化为一个合力 ,合力过简化中心。此时简 化也是合成。 ' 3. 若简化结果: FR 0 , MO 0 ,力系平衡。
F Fzi
' Rz
' (Fxi )2 (Fyi )2 (Fzi )2 主矢大小: FR
主矢的方向余弦:
cos
Fxi
F
' R
cos
Fyi
F
' R
cos
F
' R
[ MO ]x、 [ MO ]y、 [ MO ]z 是 M O 在三个坐标 其中: