机构运动参数测定实验报告
实验20-机构运动参数测定实验
本测试系统测试结果不但可以由曲线形式输出,还可以直接打印出个点数值,克服了以往测试方法所在的须对记录曲线进行人工标定和数据处理,从而带来较大幅值和相位误差等问题。
一、实验目的
1.通过实验了解位移、速度、加速度、位移、角速度、角加速度测定方法。
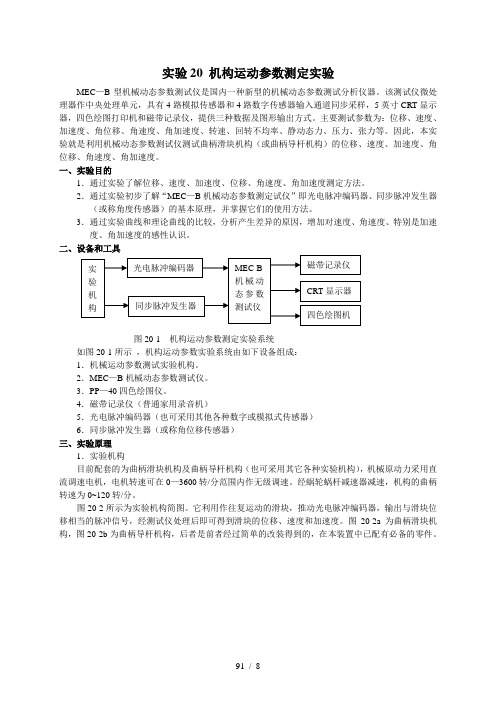
2.通过实验初步了解“MEC—B机械动态参数测定试仪”即光电脉冲编码器、同步脉冲发生器(或称角度传感器)的基本原理,并掌握它们的使用方法。
3.通过实验曲线和理论曲线的比较,分析产生差异的原因,增加对速度、角速度、特别是加速度、角加速度的感性认识。
MEC—B机械动态参数测试仪由于采用微机及相应的外围设备,因此在数据处理的灵活性和结果显示、记录、打印的便利、清晰、直观等方面明显优于非微机化的同类仪器。另外,操作命令采用代码和专用键相结合,操作灵活方便,实验准备工作非常简单,并且在学生进行实验时稍作讲解学生即可使用。
3、光电脉冲编码器
1、灯泡2、聚光镜3、光电盘4、光拦板5、主轴
图20-6数字电路框图
图10-7输出波形
四、实验步骤
1.滑块位移、速度、加速度测量
(1)将PP—40四色绘图仪接入测试仪后板插座,打开CRT电源开关,启动面板电源开关,数码管显示“P”,适当调整CRT亮度与对比度。若环境温度超过30°C应打开风扇开关。
(2)调整同步脉冲发生器与分度盘位置,使分度盘插入同步脉冲发生器探头的槽内。拨动带轮使分度盘转动,探头上的绿色指示灯每转2°(即一个光栅)闪烁一次,而红灯每转一圈闪烁一次。9即分度盘上同步长光栅进入探头槽内红灯不亮,其余位置都亮)
机构运动参数测定实验报告
机构运动参数测定实验报告一、引言1.1 背景介绍1.2 目的和意义二、研究方法2.1 选取实验样本2.2 实验设备2.3 实验流程三、数据采集与分析3.1 数据采集方法3.2 数据处理与分析四、实验结果与讨论4.1 实验结果展示4.2 结果分析4.2.1 参数一的关系分析4.2.2 参数二的关系分析五、结论5.1 结果总结5.2 研究的局限性和不足之处六、进一步研究展望6.1 可改进的方法和方案6.2 后续研究工作的建议七、参考文献八、致谢一、引言1.1 背景介绍本实验旨在通过测定机构运动参数,深入研究运动特性及其相关因素。
机构运动参数是机构运动的重要指标,对于设计和控制机构具有重要意义。
准确测定机构运动参数是提高机构效能、优化机构设计的基础。
1.2 目的和意义本实验的目的是通过实际测定,获取机构运动参数,并对数据进行分析和处理,进一步了解机构运动的特性以及与参数之间的关系。
通过实验结果的分析,可以揭示不同因素对机构运动参数的影响,并为后续研究和应用提供理论基础。
二、研究方法2.1 选取实验样本根据研究目的,选取了具有代表性的机构样本作为实验对象,并根据一定的条件进行筛选和匹配。
2.2 实验设备实验所需设备包括测量仪器、数据采集系统和计算机等。
测量仪器要求具备高精度和稳定性,以确保数据的准确和可靠性。
数据采集系统需要能够实时采集和记录各项参数,并提供数据处理和分析的功能。
2.3 实验流程本实验的流程包括样本准备、测量数据采集、数据处理与分析等步骤。
在每个步骤中,需要按照规定的操作方法和流程进行实验,以保证实验结果的可靠性。
三、数据采集与分析3.1 数据采集方法通过实验设备和测量仪器对样本进行测量,并实时采集各项运动参数。
为了确保数据的准确性,需要重复多次实验,并在不同条件下进行测量。
3.2 数据处理与分析对采集到的数据进行处理和分析,包括数据清洗、统计分析、可视化展示等。
采用适当的数学模型和方法,对数据进行拟合和分析,揭示不同参数之间的关系及其影响因素。
最新机构设计技术机构运动与力参数测试实验报告
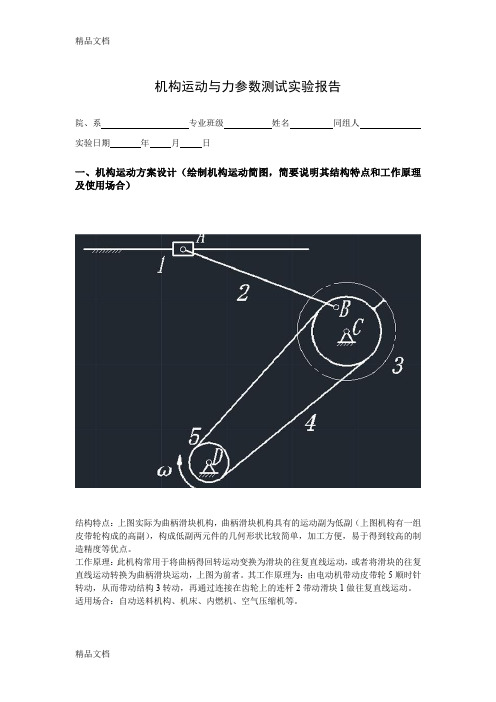
机构运动与力参数测试实验报告院、系专业班级姓名同组人实验日期年月日一、机构运动方案设计(绘制机构运动简图,简要说明其结构特点和工作原理及使用场合)结构特点:上图实际为曲柄滑块机构,曲柄滑块机构具有的运动副为低副(上图机构有一组皮带轮构成的高副),构成低副两元件的几何形状比较简单,加工方便,易于得到较高的制造精度等优点。
工作原理:此机构常用于将曲柄得回转运动变换为滑块的往复直线运动,或者将滑块的往复直线运动转换为曲柄滑块运动,上图为前者。
其工作原理为:由电动机带动皮带轮5顺时针转动,从而带动结构3转动,再通过连接在齿轮上的连杆2带动滑块1做往复直线运动。
适用场合:自动送料机构、机床、内燃机、空气压缩机等。
二、绘制平面机构的运动学曲线s、v和a曲线。
三、根据数据曲线分析搭建的机构,包括是否有运动冲击,运行状况如何。
并分析波动、冲击、不稳定的原因。
根据搭建机构及数据曲线分析,运动有几个局部位置有运动冲击,但对整体影响不大,运动状况较为顺利。
1.根据角位移分析,可看出角速度线并不是水平直线,而是有一个微小的上下跳动的幅度。
其产生的原因可能是本身频率不稳定,或者是滑块来回摩擦系数不一致产生。
2.根据直线位移曲线图,可看出位移曲线并不是光滑的曲线,在波峰跟波谷都有一段是直线。
与直线的末端相连的曲线一开始便有较大的斜率,这会对测量器材造成一定的冲击,同时也造成机构的不稳定。
排除构件连接之间的偏差,为了更好测量滑块的往复运动,而不导致滑块卡死;连接滑块的测量器材在连接点有较大的松弛度,从而导致滑块在最左端和最有端有一段测量的空窗期,导致不能测量进而产生速度曲线的波峰、波谷有一段直线。
四、测量各构件尺寸,利用机械原理知识编程绘制所搭建机构的运动学曲线,求解各杆件的轴向力,并分析误差产生的原因。
机构运动简图的测绘实验报告doc
机构运动简图的测绘实验报告篇一:机构运动简图的测绘和分析试验报告实验一机构运动简图的测绘和分析一. 实验目的1. 学会根据各种机械实物或模型,绘制机构运动简图;2. 分析和验证机构自由度,进一步理解机构自由度的概念,掌握机构自由度的计算方法;3. 加深对机构结构分析的了解。
二. 设备和工具1. 各类典型机械的实物(如:缝纫机等)2. 各类典型机械的模型(如:内燃机模型、牛头刨床等);3. 钢皮尺,内外卡钳,量角器(根据需要选用);4. 三角板,铅笔,橡皮,稿纸(自备)。
三. 原理和方法1. 原理由于机构和运动仅与机构中所有的构件的数目的构件所组成的运动副的数目、类型、相对位置有关,因此,在绘制机构运动简图时,可以撇开构件的形状和运动副的具体构造,而用一些简略的符号(如教科书和机械设计手册中有关“常用构件的运动副简图符号”的规定)来代替构件和运动副,并按一定的比例尺表示运动副的相对位置,以此表明机构的运动特征。
表1-1为常用符号示例。
2. 方法(1)确定组成机构的构件数目测绘时使被测绘机械缓慢运动,仔细观测机构的运动,区分各个运动单元,从而确定组成机构的构件数目,找出原动件。
(2)测绘运动副的种类、数目根据相联接两构件的接触情况及相对运动的特点,确定各个运动副的种类。
(3)合理选择投影面,坐标和原动件位置选与机构的各个构件上的点运动平面皆平行的平面,或选能反映机构运动特征的其他平面做投影面。
转动(或移动)原动件,找出每个构件都能表达清楚的原动件位置。
(4)绘机构运动简图的示意图徒手按规定的符号,凭目测,使图与实物大致成比例(转动副位置、移动副导路方位,高副接触点及曲率),从原动件开始,依构件的连接次序,逐渐画出机构运动简图的示意图。
用数字1、2、3??区分构件,用字母A、B、C??区分运动副。
(5)绘正式机构运动简图仔细测量与机构运动有关的尺寸,即转动副间的中心距和移动导路的方向等,按适当的比例尺画出正式机构运动简图。
机构运动参数测定与分析实验
机构运动参数测定与分析实验实验2 四杆机构运动参数测量与动态性能分析之一本实验通过测量一四杆机构从动件的运动规律,学习用实验方法研究简单机械的运动性能。
培养分析实验结果的能力。
一、实验目的1、了解曲柄摆杆机构运动特点。
2、了解摆杆运动参数测量原理与方法。
3、把实验结构与理论计算机结构比,分析二者不完全相同的原因*4、初步了解构件弹性对机构运动性能的影响。
二、设备与工具GD —1型机构动态实验台是一个多功用的实验台,它可以用研究刚性机构的运动规律也可用于研究弹性机构的运动规律。
它可以研究构件尺寸对运动规律的影响,也可以研究构件弹性对构件的影响和在不同转速下构件的弹性动力效应。
本次实验只运用该设备测量在杆件尺寸确定的情况下,摆杆的运动规律,包括摆杆角位移、角速度、角加速度,与理论计算结果进行比较。
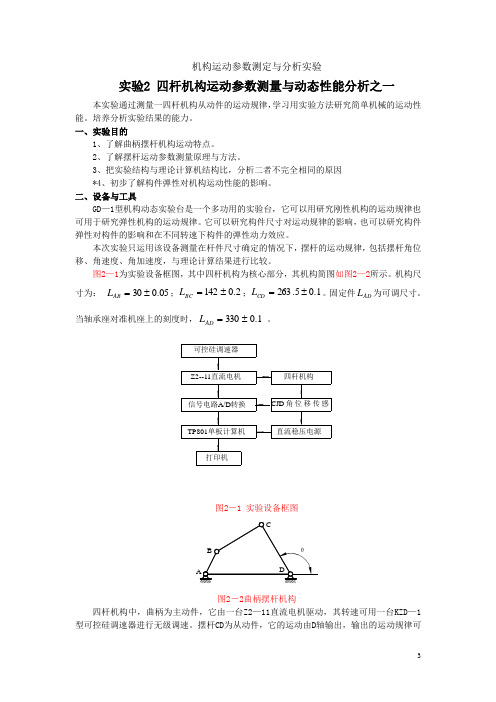
图2—1为实验设备框图,其中四杆机构为核心部分,其机构简图如图2—2所示。
机构尺寸为:05.030±=AB L ;2.0142±=BC L ;1.05.263±=CD L 。
固定件AD L 为可调尺寸。
当轴承座对准机座上的刻度时,1.0330±=AD L 。
图2-1 实验设备框图图2-2曲柄摆杆机构四杆机构中,曲柄为主动件,它由一台Z2—11直流电机驱动,其转速可用一台KZD —1型可控硅调速器进行无级调速。
摆杆CD 为从动件,它的运动由D 轴输出,输出的运动规律可可控硅调速器信号电路A/D 转换 TP801单板计算机打印机 CJD 角位移传感四杆机构Z2--11直流电机 直流稳压电源A BCD θ通过安装在轴端的传感器测量。
三、原理和方法本实验设备中所采用的CJD 角位移传感器是根据电位计式变换器的测量原理设计的。
其工作原理如图2—3I 部分 中所示。
图2—3 测量原理图摆杆的角位移通过传感器内部的机械结构带动原理图中的电刷在电位器上滑动。
因此,有相应的讯号输出达到测量角度的目的。
机构运动简图的测绘实验报告

机构运动简图的测绘实验报告篇一:实验一机构运动简图的测绘及分析实验一机构运动简图的测绘及分析一、实验目的:1、掌握机构运动简图测绘的基本方法;2、巩固机构自由度的计算。
并验证机构具有确定运动的条件;3、通过对机构进行结构分析,了解结构的组成原理二、设备和工具机器和机构模型量具铅笔橡皮和草稿纸三、实验原理机构运动与机构中的构件的数目、构件组成运动副的形式以及各运动副的相对位置有关,而与构件的复杂外形和运动副的具体结构无关,因此,在工程上对机构进行结构分析、运动分析和力分析时可以用机构运动简图来进行。
机构运动简图既简单又能正确地反映一部机器的运动特征,因此,正确地测量和绘制机构运动简图是机械设计的重要组成部分、四、实验方法与步骤1、观察机构的运动,弄清构件的数目缓慢移动被测的及其或机构模型,从原动件开始,根据运动传递路线,仔细观察相连接的两构件是否有相对运动,特别要注意那些运动很微小的构件,从而弄清楚组成机构的构件数目。
2、判别运动副类型一般,从原动件开始,遵循运动传递的顺序,仔细观察各相邻构件之间的相对运动性质。
由此确定机构中运动副的类型、数目3、合理选择视图一般选择与机构的多数构件运动平面平行的平面作为投影面。
必要时也可以就机构的不同部分选择两个或者两个以上的投影面,然后展开到一张图面上。
或者把主运动简图上难于表示清楚的部分,另绘一张局部简图。
对于齿轮机构则可选择与运动平面相垂直的平面作为投影面。
总之,以简单清楚的把机构的运动情况表示出来为原则。
4、画出机构运动简图的草图,计算机构的自由度。
将原动件转到某一位置(即可看清多数活动构件和运动副的位置)。
在草稿纸上按照规定的符号,目测尺寸使实物与图形大致成比例,徒手画出机构运动简图的草图,然后计算机构的自由度,并将草图与实物对照,观察是否和实物相符合。
5、画正式的机构运动简图。
确定尺寸比例尺,认真测量机构各运动副之间的相对位置参数,在实验报告纸上用三角板和圆规,将上述草图按照选定的比例尺μl(构件的真实长度与图示长度的比值,单位为m/mm或mm/mm)画出正式的机构运动简图。
机构运动方案实验报告
机构运动方案实验报告机构运动方案实验报告一、引言机构运动方案是指通过机构的运动来实现特定的目标。
在本次实验中,我们设计了一个机构运动方案,旨在探索机构运动对于特定任务的影响。
本报告将详细介绍实验的设计和结果,并对实验进行分析和讨论。
二、实验设计1. 实验目标本次实验的目标是探索机构运动对于特定任务的影响。
我们设计了两种不同的机构运动方案,分别为线性运动和旋转运动。
通过比较两种方案在特定任务中的表现,我们可以评估不同机构运动对于任务完成的效果。
2. 实验装置我们使用了一个简化的机构装置来进行实验。
该装置由一个电机驱动的传动系统和一个工作平台组成。
传动系统可以实现线性运动和旋转运动,分别对应两种不同的机构运动方案。
3. 实验步骤a) 实验准备:根据实验目标,设置传动系统的初始参数,并确保装置正常工作。
b) 线性运动方案:将传动系统设置为线性运动模式,并进行一系列特定任务的测试。
记录任务完成时间和准确度。
c) 旋转运动方案:将传动系统设置为旋转运动模式,并进行相同的特定任务测试。
同样记录任务完成时间和准确度。
d) 数据分析:比较两种方案在任务完成时间和准确度上的差异,并进行统计学三、实验结果1. 线性运动方案通过对线性运动方案进行测试,我们得到了如下结果:a) 任务完成时间:平均完成时间为10秒,最短时间为8秒,最长时间为12秒。
b) 任务准确度:成功完成任务的次数为9次,失败1次。
2. 旋转运动方案通过对旋转运动方案进行测试,我们得到了如下结果:a) 任务完成时间:平均完成时间为12秒,最短时间为10秒,最长时间为15秒。
b) 任务准确度:成功完成任务的次数为8次,失败2次。
四、实验分析与讨论通过对实验结果的分析,我们可以得出以下结论:1. 在任务完成时间上,线性运动方案相比旋转运动方案更有效率。
线性运动方案的平均完成时间较短,且最短时间和最长时间的差异较小,说明线性运动方案的稳定性较好。
2. 在任务准确度上,两种方案的表现相差不大。
机构运动参数测定实验报告

机构运动参数测定实验报告一、实验目的本实验旨在通过测定机构运动参数,掌握机构运动学分析的基本方法和技能,加深对机构运动学的理解。
二、实验原理机构是由若干个刚体构成的复杂系统,其中各个刚体之间通过铰链、滑动副等连接方式相互连接。
机构运动学分析是研究机构各个刚体的运动状态和运动规律的学科。
机构运动学分析的基本方法是建立机构的运动学模型,通过对模型的分析,得到机构各个刚体的运动参数。
机构运动参数包括位移、速度、加速度等。
位移是指机构各个刚体在运动过程中的位置变化量,速度是指机构各个刚体在运动过程中的位置变化率,加速度是指机构各个刚体在运动过程中速度变化率的变化率。
三、实验器材1.机构运动学分析实验装置2.计算机四、实验步骤1.打开机构运动学分析实验装置,将待测机构放置在装置上。
2.启动计算机,打开机构运动学分析软件。
3.在软件中建立机构的运动学模型。
4.通过软件分析,得到机构各个刚体的位移、速度、加速度等运动参数。
五、实验结果通过实验,我们得到了待测机构的运动参数。
具体数据如下:1.机构各个刚体的位移:刚体1:x=10cm,y=5cm刚体2:x=15cm,y=10cm刚体3:x=20cm,y=15cm2.机构各个刚体的速度:刚体1:vx=2cm/s,vy=1cm/s刚体2:vx=3cm/s,vy=2cm/s刚体3:vx=4cm/s,vy=3cm/s3.机构各个刚体的加速度:刚体1:ax=0.5cm/s²,ay=0.2cm/s²刚体2:ax=0.8cm/s²,ay=0.4cm/s²刚体3:ax=1.2cm/s²,ay=0.6cm/s²六、实验分析通过对机构运动参数的测定,我们可以了解机构各个刚体在运动过程中的运动状态和规律。
在实际工程中,机构运动学分析是非常重要的,可以帮助工程师设计出更加合理、高效的机构系统。
七、实验结论通过本次实验,我们成功地测定了机构的运动参数,掌握了机构运动学分析的基本方法和技能。