大地基准的现代化和卫星大地测量新成果_参加_省略_量协会_IAG_2003年日本
地球椭球体(Ellipsoid)、大地基准面(Datum)及地图投影(Projection)三者的基本概念

高斯-克吕格投影与UTM投影高斯-克吕格(Gauss-Kruger)投影与UTM投影(Universal Transverse Mercator,通用横轴墨卡托投影)都是横轴墨卡托投影的变种,目前一些国外的软件或国外进口仪器的配套软件往往不支持高斯-克吕格投影,但支持UTM投影,因此常有把UTM投影当作高斯-克吕格投影的现象。
从投影几何方式看,高斯-克吕格投影是“等角横切圆柱投影”,投影后中央经线保持长度不变,即比例系数为1;UTM投影是“等角横轴割圆柱投影”,圆柱割地球于南纬80度、北纬84度两条等高圈,投影后两条割线上没有变形,中央经线上长度比0.9996。
从计算结果看,两者主要差别在比例因子上,高斯-克吕格投影中央经线上的比例系数为1, UTM投影为0.9996,高斯-克吕格投影与UTM投影可近似采用 X[UTM]=0.9996 * X[高斯],Y[UTM]=0.9996 * Y[高斯],进行坐标转换(注意:如坐标纵轴西移了500000米,转换时必须将Y 值减去500000乘上比例因子后再加500000)。
从分带方式看,两者的分带起点不同,高斯-克吕格投影自0度子午线起每隔经差6度自西向东分带,第1带的中央经度为3°;UTM投影自西经180°起每隔经差6度自西向东分带,第1带的中央经度为-177°,因此高斯-克吕格投影的第1带是UTM的第31带。
此外,两投影的东伪偏移都是500公里,高斯-克吕格投影北伪偏移为零,UTM北半球投影北伪偏移为零,南半球则为10000公里。
高斯-克吕格投影与UTM投影坐标系高斯- 克吕格投影与UTM投影是按分带方法各自进行投影,故各带坐标成独立系统。
以中央经线(L0)投影为纵轴X,赤道投影为横轴Y,两轴交点即为各带的坐标原点。
为了避免横坐标出现负值,高斯- 克吕格投影与UTM北半球投影中规定将坐标纵轴西移500公里当作起始轴,而UTM南半球投影除了将纵轴西移500公里外,横轴南移10000公里。
《全球定位系统》
GPS系统的组成
GPS由三个独立的部分组成: ●空间部分:21颗工作卫星,3颗备用卫 星。 ● 地面控制系统:1个主控站,3个注入 站,5个监测站。 ● 用户设备部分:接收GPS卫星发射信 号,以获得必要的导航和定位信息,经数 据处理,完成导航和定位工作。GPS接收 机硬件一般由主机、天线和电源组成。
整理ppt
整理ppt
空间部分
GPS的空间部分是由24 颗GPS 工 作卫星所组成的。其中21 颗为可用 于导航的卫星,3 颗为活动的备用 卫星。24 颗卫星分布在6个倾角为 55°的轨道上绕地球运行。卫星的 运行周期约为12 恒星时,每颗GPS 工作卫星都发出用于导航定位的信 号,GPS 用户正是利用这些信号来 进行工作的。 目前可用的卫星通常有28颗之多。
全球定位系统
Global Position System
整理ppt
概述
GPS是英文Navigation Satellite Timing and Ranging / Global Positioning System的缩写,意为利用卫星导航进行 测时和测距,以构成全球卫星定位系统。是美国国防部主要 为满足军事部门对海上、陆地和空中设施进行高精度导航 和定位的需要而建立的。自1973年美国军方批准成立联合 计划局开始GPS的研究工作到1993年系统建成,该工程历时 20年,耗资300亿美元,成为继阿波罗登月计划和航天飞 机计划之后的第三项庞大空间计划。它从根本上解决了人 类在地球上的导航和定位问题,在军事和工农业等领域得 到了广泛的应用。给导航和定位技术带来了巨大的变化。
整理ppt
整理ppt
GPS系统由三部分构成,分别为空间星座部分、 地面监控部分、用户设备部分。空间星座和地面 监控部分由美国国防部控制,用户使用GPS接收 机接收卫星信号进行高精度的精密定位以及高精 度的时间传递。目前,二十多颗GPS卫星已覆盖 了全球,每颗卫星均在不间断地向地球播发调制 在两个频段上的卫星信号。在地球上任何一点, 均可连续地同步观测至少4颗GPS卫星,从而保障 了全球、全天候的连续地三维定位,而且具有良 好的抗干扰性和保密性。因此,全球定位系统已 成为美国导航技术现代化的最重要标志,并且被 视为本世纪美国继阿波罗登月计划和航天飞机计 划之后的又一重大科技成就。
我国的测量坐标系

我国的测量坐标系WGS-84坐标系WGS-84的定义:WGS-84是修正NSWC9Z-2参考系的原点和尺度变化,并旋转其参考⼦午⾯与BIH定义的零度⼦午⾯⼀致⽽得到的⼀个新参考系,WGS-84坐标系的原点在地球质⼼,Z轴指向BIH1984.0定义的协定地球极(CTP)⽅向,X轴指向BIH1984.0的零度⼦午⾯和CTP⾚道的交点,Y轴和Z、X轴构成右⼿坐标系。
它是⼀个地固坐标系。
WGS-84椭球及其有关常数:WGS-84采⽤的椭球是国际⼤地测量与地球物理联合会第17届⼤会⼤地测量常数推荐值,其四个基本参数长半径:a=6378137±2(m);地球引⼒常数:GM=3986005×108m3s-2±0.6×108m3s-2;正常化⼆阶带谐系数:C20=-484.16685×10-6±1.3×10-9;C20=-5J2=108263×10-8地球⾃转⾓速度:ω=7292115×10-11rads-1±0.150×10-11rads-1 建⽴WGS-84世界⼤地坐标系的⼀个重要⽬的,是在世界上建⽴⼀个统⼀的地⼼坐标系。
2.2.2 国家⼤地坐标系1.1954年北京坐标系(BJ54旧)坐标原点:前苏联的普尔科沃。
参考椭球:克拉索夫斯基椭球。
平差⽅法:分区分期局部平差。
存在问题:(1)椭球参数有较⼤误差。
(2)参考椭球⾯与我国⼤地⽔准⾯存在着⾃西向东明显的系统性倾斜。
(3)⼏何⼤地测量和物理⼤地测量应⽤的参考⾯不统⼀。
(4)定向不明确。
2.1980年国家⼤地坐标系(GDZ80)坐标原点:陕西省泾阳县永乐镇。
参考椭球:1975年国际椭球。
平差⽅法:天⽂⼤地⽹整体平差。
特点:(1)采⽤1975年国际椭球。
(2)参⼼⼤地坐标系是在1954年北京坐标系基础上建⽴起来的。
(3)椭球⾯同似⼤地⽔准⾯在我国境内最为密合,是多点定位。
地球椭球体(Ellipsoid)、大地基准面(Datum)及地图投影(Projection)三者地基本概念
地球椭球体(Ellipsoid)、大地基准面(Datum)及地图投影(Projection)三者的基本概念地球椭球体(Ellipsoid)众所周知我们的地球表面是一个凸凹不平的表面,而对于地球测量而言,地表是一个无法用数学公式表达的曲面,这样的曲面不能作为测量和制图的基准面。
假想一个扁率极小的椭圆,绕大地球体短轴旋转所形成的规则椭球体称之为地球椭球体。
地球椭球体表面是一个规则的数学表面,可以用数学公式表达,所以在测量和制图中就用它替代地球的自然表面。
因此就有了地球椭球体的概念。
地球椭球体有长半径和短半径之分,长半径(a)即赤道半径,短半径(b)即极半径。
f=(a-b)/a为椭球体的扁率,表示椭球体的扁平程度。
由此可见,地球椭球体的形状和大小取决于a、b、f 。
因此,a、b、f被称为地球椭球体的三要素。
对地球椭球体而言,其围绕旋转的轴叫地轴。
地轴的北端称为地球的北极,南端称为南极;过地心与地轴垂直的平面与椭球面的交线是一个圆,这就是地球的赤道;过英国格林威治天文台旧址和地轴的平面与椭球面的交线称为本初子午线。
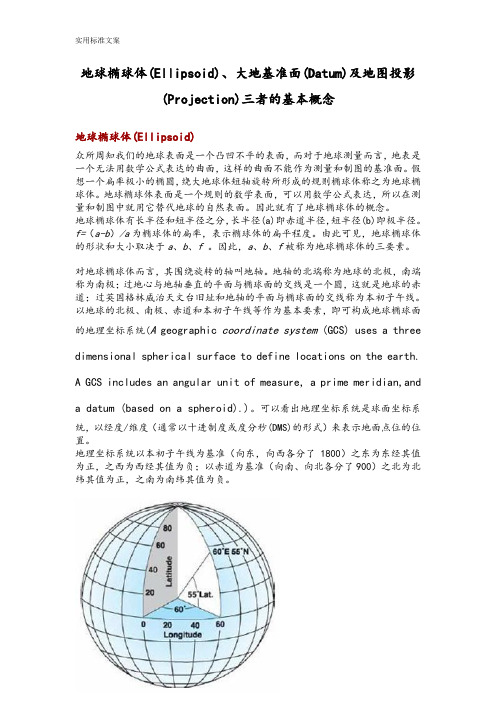
以地球的北极、南极、赤道和本初子午线等作为基本要素,即可构成地球椭球面的地理坐标系统(A geographic coordinate system (GCS) uses a threedimensional spherical surface to define locations on the earth.A GCS includes an angular unit of measure, a prime meridian,and a datum (based on a spheroid).)。
可以看出地理坐标系统是球面坐标系统,以经度/维度(通常以十进制度或度分秒(DMS)的形式)来表示地面点位的位置。
地理坐标系统以本初子午线为基准(向东,向西各分了1800)之东为东经其值为正,之西为西经其值为负;以赤道为基准(向南、向北各分了900)之北为北纬其值为正,之南为南纬其值为负。
知识竞赛题库-决赛 题目(1)

一、轮答题1、历史人文1、下列哪一个项目没有获得国家科技进步二等奖:A、特大异型工程精密测量与重构技术研究及应用(2010年)B、南极地区测绘与遥感应用研究(1998年)C、中国西北地区卫星定位网的建立及在石油地质勘探中的应用(1988年)D、GPS航空摄影测量技术(1999年)答案:C。
该项目由宋成骅、刘经南完成。
2、由武汉大学主持的“测绘基准和空间信息快速获取关键技术机器在灾害应急测绘中的应用”获得过国家科技进步二等奖,利用该成果,可以迅速建立现代化测绘基准,可进一步用于地震灾情评估和重建规划。
下列哪一次地震中应用了该成果:A、唐山大地震B、2008年5月12日的汶川大地震C、2007年4月20日发生在东经125.1北纬25.7的东海地震(震级6.5)D、2008年3月21日新疆于田县7.3级地震答案:B。
基于该成果在应急测绘和现代化测绘基准的建立过程中的卓越贡献,于2011年被评为国家科技进步2等奖。
3、测绘学院的院训是“敬业乐群,求是创新”,取自院庆时主席台两侧的楹联:“桃李芝兰四海五湖来敬业乐群经天纬地结硕果;美名声誉五方六合传戮力同心求是创新展宏图”,请问该院训是在院庆多少年的时候提出的?A、40;B、45;C、50;D、56答案:对联中已经暗藏该题答案。
上联中的“四海五湖”中的“四”和“五”,表示学院华诞四十五。
下联中的“五方六合”中的“五”和“六”,表示学院建立于1956年。
因此答案为:B,45周年庆。
4、2011年12月8日,中国工程院公布2011年院士增选结果,中国工程院9个学部共选举产生54名新院士。
新当选的院士平均年龄为56.7岁,其中60岁以下38人,我校有两名教授入选,分别是武汉大学校长李晓红和测绘学院院长李建成。
请问这两位当选时的年龄各是多少周岁?A、52周岁,46周岁B、50周岁,44周岁C、52周岁,44周岁D、50周岁,46周岁答案:A。
李晓红校长生于1959年6月,李建成院长生于1964年12月,李建成院士是本届工程院院士中最年轻的一位。
珠峰测量一部测绘科技进步史

焦横纵
点一部测绘科技进步史
珠
穆朗玛峰是地质史上创新世中期结束海浸后,喜马拉雅山抬升运动以及青藏高原造陆运动打造的世界最
年轻山脉最高峰,至今仍不断长高,引起世界科考工作者、探险家和登山家们的高度关注和无比向往。
早在1714年,清康熙年间,便有详细文字记载珠穆朗玛峰最早发现者和测量者,初步测量了珠峰的位置和高度,这是人类第一次测绘珠峰。
1853年,英属印度测量局多次遥测珠峰,公布8840米的高程数据。
1953年5月29日,新西
兰登山者埃德蒙·希拉里作为英国登山队队员与尼泊尔向导丹增·诺尔盖一起沿东南山脊路线登上珠穆朗玛峰,成为登顶成功的世界第一人。
1960年5月25日,中国登山运动员王富洲、贡布、屈银华三人首次从北坡登上珠穆朗玛峰。
1975年,我国首次将测量觇标矗立于珠峰之巅,测得珠峰海拔高程为8848.13米。
2005年,中国登顶复测珠峰,获得了峰顶岩石面海拔高程8844.43米。
不同时期以不同方式测量珠峰,以及对珠峰高程的多次测量,反映了人类对自然的求知探索精神,并成为人类了解和认识地球的一个重要标志。
2021.02
39。
国家大地测量基本技术规定
1954 年北京坐标系存在问题
• (1) 采用的克拉索夫斯基椭球与现代椭球相比, 长半轴大了 108 m,扁率倒数大了 0.04; • (2) 椭球定位定向有较大偏差,与我国大地水准 面存在着自西向东明显的系统性倾斜,最大倾斜 量达 65 m; 椭球短轴的定向也不明确; • (3)坐标系原点不在北京,而在前苏联的普尔科沃, 取名 为“北京坐标系”名不符实; • (4) 几何大地测量与物理大地测量采用的椭球也不 统一,给实际使用带来不便;
HNCORS网图
三、国家大地测量基本技术规定 基本内容
• • • • • • •
1、适用范围 2、术语和定义 3、总则 4、大地基准与大地控制网 5、高程基准和高程控制网 6、重力基准与重力测量控制网 7、深度基准
1、国家大地测量基本技术规定 适用范围
本标准规定了建立与维持国家大地控制 网、高程控制网和重力控制网,确定似大 地水准面的基本技术指标和技术要求,以 实现全国陆海统一的大地基准、高程基准 以及与其相应的深度基准、重力基准。在 中华人民共和国领域和管辖的其他海域从 事的大地测量活动必须遵守本标准。
• (3) 2000 坐标框架总体精度仍然偏低,尚 不能提供点位的三维变化信息,显然不能 满足减灾防灾和地球动力学研究的需要。 • (4) 点位归算十分困难。 我国 2000框架采 用的 是国际地球参考架(ITRF)97框架, 2000.0 历元,这对于目前广泛采用的GPS 精确定位(ITRF2005 框架和当前历元)带来 不便,若要进行转换,必须有高分辨率的 速度场资料,以便 实施已知点从 2000 年 至当前历元的点位归算。 显然目前的条件 尚不具备。 因此 2000 中国坐标框架仍应 该实时进行更新,尤其是历元的更新。
CGCS2000 与WGS-84 坐标系
GPS全球卫星定位系统

2018/2/22
13
组成星际站际两次差分观测值
Si
i i
Sl
Pk Pj
l
Pj
Pk
l
Pj
•可以消去卫星钟的系统偏差 •可以消去接收机时钟的误差
2018/2/22
Pk
•可以消去轨道(星历)误差的影响 •可以削弱大气折射对观测值的影响
2018/2/22
15
弄清楚初始整周未知数的确定与定位精度的关系
m 1.00 精 度 0.10 0.01
经典静态定位 快速静态定位 •
整周未知数确定后 整周未知数确定前
0 0
30 2
80 5
时间(分)
如果无法准确解出初始整周未知数,则定位精度难以优于±1m
•
• •
随着初始整周未知数解算精度的提高,定位精度也相应提高
2018/2/22
25
空间大地坐标系
空间大地坐标系是采用大 地经、纬度和大地高来描 述空间位置的。纬度是空 间的点与参考椭球面的法 线与赤道面的夹角,经度 是空间中的点与参考椭球 的自转轴所在的面与参考 椭球的起始子午面的夹角, 大地高是空间点沿参考椭 球的法线方向到参考椭球 面的距离。
2018/2/22
2018/2/22
20
4. 其它 GPS 控制部分人为或计算机造成的 影响 由于GPS 控制部分的问题或用户在 进行数据处理时引入的误差等。 数据处理软件的影响 数据处理软件的算法不完善对定位结 果的影响。
2018/2/22
21
坐标系、基准和坐标系统
测量的基本任务就是确定物体在空 间中的位置、姿态及其运动轨迹。 而对这些特征的描述都是建立在某 一个特定的空间框架和时间框架之 上的。所谓空间框架就是我们常说 的坐标系统,而时间框架就是我们 常说的时间系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第19卷第1期2004年2月地球科学进展ADVANCE IN EAR TH SCIENCESVol.19 No.1Feb.,2004文章编号:100128166(2004)0120012205大地基准的现代化和卫星大地测量新成果Ξ———参加国际大地测量协会(IA G)2003年日本札晃大会札记陈俊勇(国家测绘局,北京 100830)摘 要:国际大地测量协会(IA G)2003年7月在日本札晃举行了近8天的学术讨论会。
现将讨论会中关于我国近邻国家大地基准现代化,低轨卫星(L EO)解算地球重力场的新方法———《一步法》,及GPS数据处理方法的新进展等进行扼要介绍。
《国际地面参考框架(ITRF)》一直作为全球的大地测量坐标框架,它目前存在的主要问题是它的框架点是一律被假定作常速运动的,但实际情况与ITRF的这一假定是不一致的。
在这次大会上我国的近邻国家如日本、蒙古、新西兰、韩国、马来西亚等报告了本国大地坐标系统、坐标框架的更新和现代化,以及地区大地水准面的精化工作。
通常利用二步法从低轨卫星的轨道信息求定地球重力场及其时变,大会上报告的一步法是对这一经典方法的重大改进和突破。
GPS数据处理方法的新进展中比较突出的有:顾及观测数据短暂性相关影响的GPS连续运行网坐标及其移动速度的解算方案;含有系统误差的GPS观测数据的解算等。
关 键 词:大地测量;大地基准;卫星大地测量中图分类号:P228 文献标识码:B0 概 况国际大地测量和地球物理联合会(IU GG)在2003年6月30日至7月11日在日本札晃举行了4年一次的大会,与此同时,其下属的7个协会,包括国际大地测量协会(IA G),也同时举行协会的或协会间联合的学术讨论会。
这次大会的参加者来自96个国家和地区,5200余人,其中来自日本国内的约1800人。
由于受非典影响,中国大陆有相当一部分与会者未能参加此次大会,持中国护照注册参会的共有110余人,其中直接来自大陆约50人。
这次向IU GG大会提交的学术论文共7000余篇。
涉及IA G的论文为457篇,其中口头报告为199篇,以张贴形式报告的为258篇。
上述IA G论文中,由居住在中国大陆的作者提交的论文35篇,其中安排为口头报告的有18篇。
这次IA G学术讨论会的主题有以下几个大的方面,即:大地定位,地球重力场测定,地球动力学,地球自转和重力场的变化,新型空间大地测量技术,大地测量理论和方法等。
现将IA G学术讨论会中作者认为值得关注的部分综述如下。
1 大地基准的现代化1.1 国际地面坐标框架存在的问题和今后的改进10余年来《国际地面参考框架(ITRF)》一直作为全球的大地测量坐标框架。
对它目前存在的问题和今后的改进方向,进行了综合研究[1,2]后,得到了以下几点共识。
①ITRF是多种空间技术(如GPS、G LONASS、VLB I、SL R、LL R、DORIS等)联合解算的结果,这样就具有综合各种技术长处的优势,但也随之带来了问题。
因为各种不同的空间技术系统有各自的基准和各自的偏差,这是使目前联合解算结果的精度不能得到进一步提高,受到制约的主要原因。
②从多种空间技术所综合解算得到的坐标框架Ξ 收稿日期:2003207223;修回日期:2003211203. 作者简介:陈俊勇(19332),男,浙江宁波人,研究员,中国科学院院士,主要从事大地测量学研究1E2m ail:jychen@点坐标及其移动速度值分析,说明其中相当一部分点的移动速度不是线性运动,而目前ITRF中的框架点是一律被假定作常速运动的,也就是说实际情况与ITRF的这一假定是不一致的。
③ITRF中部分点(约80个)或由于观测质量、或由于仪器老化,或由于运行时间尚短等原因,这些站点的坐标和移动速度的精度都比较差。
上述3个因素都使ITRF 的精度受到影响,局部甚至还可能有畸变。
对解算今后ITRF时,建议考虑以下几个重要方面的问题。
①妥善解决关于数据归算中的约束问题。
建议采用无约束法方程式进行解算,替代目前应用的方差协方差矩阵参与解算。
②研究目前实际存在的观测数据不协调问题。
即在不同技术之间,不同计算中心的解算结果之间,研究它们所采用的模型、参数、基准定义、计算方法等方面的差别,研究产生不同解算结果有差异的根源。
③为了更好地定义ITRF的动态基准,建议采用动态板块运动模型,如AP KIM模型,替代目前的NNR2NUV EL21A模型,以确保真正的“无净转”条件。
④目前假设点位的常速移动在实际中是不真实的,它们是随时间而呈现非线性变化。
因此对ITRF的点位运动的时间系列如何表示,应该作深入研究。
上述提出的一些改善途径和方法,都还有待进一步在实践中去探索它们的可行性和效益。
1.2 近邻国家大地基准的更新和现代化我国的近邻国家如日本、蒙古、新西兰、韩国、马来西亚等在这次大会上报告了本国大地坐标系统或大地坐标框架的更新和现代化工作和进程。
(1)日本大地基准现代化[3]。
从2000年4月开始日本新的大地基准J G D2000正式取代了具有百年历史的东京大地基准。
J G D2000采用国际地面参考系统(ITRS)的定义,历元定为1997.0。
大地常数,包括椭球参数,取众所周知的《大地参考系统1980》(GRS80)所给定的值。
东京大地基准坐标转换为ITRS时的坐标转换参数(x0,y0,z0)分别为-146m、507m、681m。
维持J G D的大地坐标框架是由1200个GPS连续运行站(GEON ET)协同64000个一等、二等、三等经典大地点组成。
基于重力和GPS水准数据,日本推算了新的大地水准面(GE2000)。
对日本的空间数据基础设施的建设GE2000和J G D2000来说,是一个极为重要的进步。
(2)蒙古大地基准现代化[4]。
蒙古近年建立了新的国家大地坐标框架MONREF97。
该大地框架是在瑞典支援下,采用GPS观测完成的,因此该框架的大地坐标系统和W GS84保持一致。
MON2 REF97这一新的国家地心三维坐标框架,取代了原来的蒙古国家二维平面坐标系MSK42(采用克拉索夫斯基椭球)。
MSK42和原苏联普尔科伏(Pulko2 vo)1942系统保持一致(类似于中国70年代以前的老北京54坐标系)。
蒙古的高程基准目前仍沿用原苏联波罗的海高程基准,目前不考虑用MONREF97的大地高来替代。
(3)新西兰大地基准现代化[5]。
新西兰于1998年建立了一个新的大地坐标系统NZG D2000。
它是三维地心坐标系统,参考历元为2000.01.01。
坐标框架是以半动态方式定义,也就是框架点坐标和速度是在上述历元时一次给定,并假设这一其速度场是恒定的。
现在几年过去了,即使不顾框架点坐标的测量误差,由于速度场的误差以及可能的非线性变化,与参考历元时间相距越远,框架点坐标的精度和可靠性就越低。
因此现在正在考虑以下几个问题:一个给定参数历元的坐标框架,其合理的更新期是多长?给出的恒定速度场可以容许多大的误差?速度场的非线性变化如何模型化?相对于水平形变模型更为困难的是如何给出三维坐标的垂直形变模型?(4)韩国大地基准现代化[6]。
韩国于1998年推出一个完全新型的国家三维地心大地坐标系统(KG D2000),以替换现行的PP GN所定义的坐标系统。
KG D2000以ITRF97为参照,历元采用2000. 0。
这是韩国大地测量工作面向21世纪的一项重大决策。
它将向用户提供精确的,附有时相的三维地心空间坐标,而且KG D2000与国际坐标框架保持确定的、精确的连接。
KG D2000与原来经典的大地坐标系统或大地基准不同,它有以下一些特点:①以地心为大地坐标系的原点;②与国际通用的地面坐标参考系统(ITRS)和相应的椭球参数(GRS80)保持一致;③和ITRS的联系是通过KG D2000中连续运行的若干个GPS工作站与国际地面参考框架(ITRF97)的不断连测来实现的;④KG D2000的历元确定为2000. 0,即该系统中的坐标框架点的坐标值都是以此历元为准;⑤表徵KG D2000坐标框架点的标石是会移动的,也就是这些点的坐标值是变化的,因此通过长期观测后,对KG D2000中的一部分点位移动量相对平稳的点,将提供年运动速率,以保持KG D2000中坐标框架点的坐标值的现势性。
KG D2000的核心部分是有足够数量和分布合31第1期 陈俊勇:大地基准的现代化和卫星大地测量新成果 理的GPS连续运行站(COS)。
韩国国土地理院(N GI)对上述各COS所接收的GPS追踪数据,每星期计算一次,计算的主要内容是对各个COS在一周内每天在ITRF97内的坐标。
用以监测各个COS 的运行稳定性和点位稳定性。
N GI正在利用KG D2000努力开拓业务,为韩国的其他部门提供广泛服务,受到有关部门特别是地质、地震、大气,导航等单位的青睐。
(5)马来西亚大地基准现代化[7]。
马来西亚建立国家三维地心大地坐标系统N GRF2000时,采用了3个步骤。
第一是建立分布全国的数十个GPS 永久性连续运行站(MASS)。
MASS于1999年初开始运行,采用两年的GPS追踪数据(1999年1月1日至2000年12月31日)计算出MASS各站的最终坐标。
计算时用二种不同软件(B ERN ESE3.4和GIPSY)分别独立进行数据处理,以确保MASS坐标成果的可靠无误。
MASS各站坐标定义于ITRF97,历元为2000.0,其平差后精度的水平分量为±1cm,高程分量为±2cm。
在解算MASS各站坐标值的同时解算了相应的平均移动量。
MASS网定义了马来西亚三维地心大地坐标系统,也是马来西亚大地坐标框架N GRF2000的骨干。
这就是第一个步骤的实质所在。
第二是将马来西亚已有的GPS大地网(P G2 GN),共238个点拼接到MASS网上,使马来西亚三维地心坐标框架点的分布和密度实用、合理,以最终建成马来西亚国家的新的三维地心大地坐标系统。
由此重新算得的P GGN各点的新坐标和MASS的点一起成为马来西亚国家三维地心坐标框架N GRF2000的点。
通过上述二个步骤,N GRF2000确保了它所在的坐标系统和MASS保持一致即由ITRF97定义,历元为2000.0。
因此马来西亚认为该国具有了这样一个与国际通用的高精度三维地心大地坐标系后,对精确统一该国的东西两大区域的坐标系统做出了贡献;为该国正在蓬勃发展的地理信息系统提供了一个统一的基础地理框架;在应用GPS等空间技术方面会得到最大的好处,并且为社会提供GPS在陆海动态实时定位(导航)、气象、海平面监测和地震预报等方面的服务有了良好基础。
1.3 区域大地水准面的精化为了适应信息时代,各国在改善大地坐标系统和坐标框架的同时,很多国家都在致力改善本国或本地区的大地水准面。