信号与系统练习题
(完整word版)信号与系统练习题——第5章

信号与系统练习题 第5章一、选择题1、系统函数()H s 与激励信号()f t 之间的关系是(B)A 、反比关系B 、没有关系C 、线性关系D 、不确定2、信号)()(2t e t f t ε-=的单边拉普拉斯变换=)(s F (D ) A 、2)2(1+s B 、 2)2(+s sC 、 2+s sD 、21+s3、已知某系统的框图如下,则此系统的系统函数表示为(C)A 、21()23H s s s =++ B 、2()23s H s s s =++C 、243()23s H s s s +=++ D 、241()23s H s s s +=-+4、已知某LTI 系统的系统函数()H s ,唯一决定该系统的冲激响应()h t 函数形式的是(B )A 、()H s 的零点B 、()H s 的极点C 、系统的激励D 、激励与()H s 的极点 5、2(2)()(1)(2)s s H s s s +=+-,属于其零点的是(C)A 、—1B 、2C 、-2D 、1 6、2(2)()(1)(2)s s H s s s +=+-,属于其极点的是(C )A 、0B 、—2C 、2D 、1 7、已知22()22sF s s s =++,则(0)f +=(C )8、已知2()22F s s s =++,则()f ∞=(A) A 、0 B 、—2 C 、2 D 、不确定 9、信号2(1)()()t f t e t ε--=的单边拉普拉斯变换=)(s F (A )A 、2()2e F s s =+B 、2()2s F s s =+ C 、1()2F s s =+ D 、()2s F s s =+10、信号2(1)()(1)t f t e t ε--=-的单边拉普拉斯变换=)(s F (A )A 、()2s e F s s -=+B 、2()2e F s s =+ C 、1()2F s s =+ D 、()2s F s s =+11、已知信号()cos(2)f t t =的单边拉普拉斯变换2()4s F s s =+,则()[cos(2)]dy t t dt=的单边拉普拉斯变换()Y s =(B )A 、2se s -+ B 、244s -+ C 、224s s + D 、24s s +12、已知信号()cos(2)f t t =的单边拉普拉斯变换2()4s F s s =+,则()[cos(2)()]dy t t t dtε=的单边拉普拉斯变换()Y s =(C )A 、2se s -+ B 、244s -+ C 、224s s + D 、24s s +13、已知信号()f t 的单边拉普拉斯变换为()F s ,则()[()]dy t f t dt=的单边拉普拉斯变换()Y s =(A ) A 、()(0)sF s f -- B 、()(0)sF s f -+ C 、()sF s D 、()F s s14、已知信号()f t 的单边拉普拉斯变换为()F s ,则()[()()]dy t f t t dtε=的单边拉普拉斯变换()Y s =(C )A 、()(0)sF s f --B 、()(0)sF s f -+C 、()sF sD 、()F s s15、已知223()21s F s s s +=++,则(0)f +=(C )A 、0B 、-2C 、2D 、不确定 16、已知223()21s F s s s +=++,则()f ∞=(A )A 、0B 、—2C 、2D 、不确定 17、已知1()1F s s =+,则(0)f +=(C )18、已知()1F s s =+,则()f ∞=(A ) A 、0 B 、—1 C 、3 D 、不确定 19、信号5(1)()t f t e --=的单边拉普拉斯变换=)(s F (A)A 、5()5e F s s =+B 、5()5s F s s =+ C 、1()5F s s =+ D 、()5s F s s =+二、填空题1、某LTI 连续系统的系统函数为235)(2+++=s s s s H ,描述该系统的微分方程为)(5)()(2)(3)(''''t f t f t y t y t y +=++。
信号与系统练习及答案
信号与系统练习及答案一、单项选择题1.已知信号f (t )的波形如题1图所示,则f (t )的表达式为( ) A .tu(t) B .(t-1)u(t-1) C .tu(t-1) D .2(t-1)u(t-1) 2.积分式⎰-δ+δ++4422)]dt-(t 2(t))[23(t t的积分结果是( )A .14B .24C .26D .283.已知f(t)的波形如题3(a )图所示,则f (5-2t)的波形为( )4.周期矩形脉冲的谱线间隔与( ) A .脉冲幅度有关 B .脉冲宽度有关 C .脉冲周期有关D .周期和脉冲宽度有关5.若矩形脉冲信号的宽度加宽,则它的频谱带宽( )A .不变B .变窄C .变宽D .与脉冲宽度无关6.如果两个信号分别通过系统函数为H (j ω)的系统后,得到相同的响应,那么这两个信号()A .一定相同B .一定不同C .只能为零D .可以不同7.f(t)=)(t u e t的拉氏变换为F (s )=11-s ,且收敛域为( )A .Re[s]>0B .Re[s]<0C .Re[s]>1D .Re[s]<18.函数⎰-∞-δ=2t dx)x ()t (f 的单边拉氏变换F (s )等于( )A .1B .s1 C .e -2sD .s1e -2s9.单边拉氏变换F (s )=22++-s e)s (的原函数f(t)等于( )A .e -2t u(t-1)B .e -2(t-1)u(t-1)C .e -2t u(t-2)D .e -2(t-2)u(t-2)答案: BCCCBDCDA二.填空题1.如果一线性时不变系统的单位冲激响应为h(t),则该系统的阶跃响应g(t)为_________。
2.已知x(t)的傅里叶变换为X (j ω),那么x (t-t 0)的傅里叶变换为_________________。
3.如果一线性时不变系统的输入为f(t),零状态响应为y f (t )=2f (t-t 0),则该系统的单位冲激响应h(t)为_________________。
信号与系统练习题

第一章绪论1、选择题1.1、f (5-2t )是如下运算的结果 CA 、 f (-2t )右移5B 、 f (-2t )左移5C 、 f (-2t )右移25 D 、 f (-2t )左移251.2、f (t 0-a t )是如下运算的结果 C 。
A 、f (-a t )右移t 0;B 、f (-a t )左移t 0 ;C 、f (-a t )右移a t 0;D 、f (-a t )左移at0 1.3、已知 系统的激励e(t)与响应r(t)的关系为:)()()(t u t e t r = 则该系统为 B 。
A 、线性时不变系统;B 、线性时变系统;C 、非线性时不变系统;D 、非线性时变系统 1.4、已知 系统的激励e(t)与响应r(t)的关系为:)()(2t e t r = 则该系统为 C 。
A 、线性时不变系统 B 、线性时变系统 C 、非线性时不变系统 D 、非线性时变系统 1.5、已知 系统的激励e(t)与响应r(t)的关系为:)1()(t e t r -= 则该系统为 B 。
A 、线性时不变系统B 、线性时变系统C 、非线性时不变系统D 、非线性时变系统1.6、已知 系统的激励e(t)与响应r(t)的关系为:)2()(t e t r = 则该系统为 B A 、线性时不变系统 B 、线性时变系统 C 、非线性时不变系统 D 、非线性时变系统 1.7.信号)34cos(3)(π+=t t x 的周期为 C 。
A 、π2 B 、π C 、2π D 、π21.8、信号)30cos()10cos(2)(t t t f -=的周期为: B 。
A 、15π B 、5π C 、π D 、10π1.9、dt t t )2(2cos 33+⎰-δπ等于 B 。
A.0 B.-1 C.2 D.-21.10、 若)(t x 是己录制声音的磁带,则下列表述错误的是: BA. )(t x -表示将此磁带倒转播放产生的信号B. )2(t x 表示将此磁带放音速度降低一半播放C. )(0t t x -表示将此磁带延迟0t 时间播放D. )(2t x 表示将磁带的音量放大一倍播放 1.11.=⋅)]([cos t u t dtdA A .)()(sin t t u t δ+⋅- B. t sin - C. )(t δ D.t cos1.12.信号t t t x o 2cos 4)304cos(3)(++=的周期为 B 。
(完整word版)信号与系统专题练习题及答案

信号与系统专题练习题一、选择题1.设当t 〈3时,x(t)=0,则使)2()1(t x t x -+-=0的t 值为 C 。
A t>-2或t>-1 B t=1和t=2 C t>—1 D t 〉-22.设当t 〈3时,x (t)=0,则使)2()1(t x t x -⋅-=0的t 值为 D 。
A t>2或t 〉-1 B t=1和t=2 C t>—1 D t>—23.设当t<3时,x(t )=0,则使x (t/3)=0的t 值为 C 。
A t>3 B t=0 C t<9 D t=34.信号)3/4cos(3)(π+=t t x 的周期是 C 。
A π2 B π C 2/π D π/2 5.下列各表达式中正确的是 BA. )()2(t t δδ= B 。
)(21)2(t t δδ= C. )(2)2(t t δδ= D 。
)2(21)(2t t δδ=6. 已知系统的激励e(t)与响应r(t)的关系为:)1()(t e t r -= 则该系统为 B . A 线性时不变系统 B 线性时变系统 C 非线性时不变系统 D 非线性时变系统 7。
已知 系统的激励e(t )与响应r (t)的关系为:)()(2t e t r = 则该系统为 C .A 线性时不变系统B 线性时变系统C 非线性时不变系统D 非线性时变系统8。
⎰∞-=t d ττττδ2sin )( A 。
A 2u (t ) B )(4t δ C 4 D 4u (t) 10. dt t t )2(2cos 33+⋅⎰-δπ等于 B 。
A 0 B —1 C 2 D —211.线性时不变系统输出中的自由响应的形式由 A 决定A 系统函数极点的位置;B 激励信号的形式;C 系统起始状态;D 以上均不对。
12.若系统的起始状态为0,在x (t)的激励下,所得的响应为 D . A 强迫响应;B 稳态响应;C 暂态响应;D 零状态响应。
信号与系统第1章习题
人口数为上述三部分之和,即
y(k)=y(k-1)+(α-β)y(k-1)+f(k)
整理得
y(k)-(1+α-β)y(k-1)=f(k)
这是一个一阶差分方程。
63
第1章 信号与系统的基本概念
1.15 某经济开发区计划每年投入一定资金,设这批资金 在投入后第二年度的利润回报率为α%,第三年度开始年度的
号。因sint的周期T1=2π s, sin2t的周期T2=π s,且T1/T2=2为有 cosπt的周期T2=2 s, 且T1/T2=π/2 理数, 故f1(t)是周期信号,它的周期为2π s。 (2) 因sin2t的周期T1=π s, 为无理数, 故f2(t)是非周期信号。
(3) 因cost的周期为T1=2π s,
题解图 1.5-2
18
第1章 信号与系统的基本概念
(3) 由于x(2-t)=x[-(t-2)],故可将x(t)波形“翻转”后,再 右移2个单位,画出题(3)波形如题解图1.5-3中的f3(t)所示。
题解图 1.5-3
19
第1章 信号与系统的基本概念
(4) 按照“展缩-平移”方式,将x(t)波形“压缩”
34
第1章 信号与系统的基本概念
题解图 1.6-3
35
第1章 信号与系统的基本概念
(4) 先画出y(k)、y(-k)图形,然后进行相减运算,得到题 (4)序列图形如题解图1.6-4所示。
题解图 1.6-4
36
第1章 信号与系统的基本概念
(5) 和序列图形如题解图1.6-5所示。
题解图 1.6-5
第1章 信号与系统的基本概念
y(k)的一阶后向差分:
y(k)的迭分:
信号与系统练习题题库
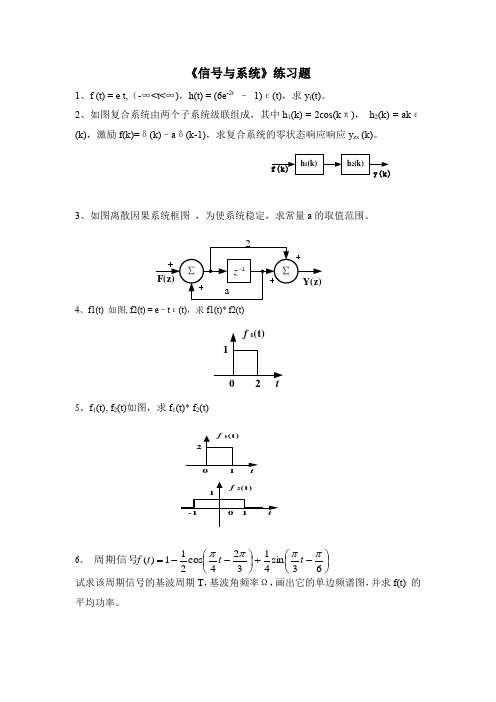
《信号与系统》练习题1、f (t) = e t,(-∞<t<∞),h(t) = (6e -2t – 1)ε(t),求y f (t)。
2、如图复合系统由两个子系统级联组成,其中h 1(k) = 2cos(k π), h 2(k) = ak ε(k),激励f(k)=δ(k)–a δ(k-1),求复合系统的零状态响应响应y zs (k)。
3、如图离散因果系统框图 ,为使系统稳定,求常量a 的取值范围。
4、f1(t) 如图, f2(t) = e –t ε(t),求f1(t)* f2(t)5、f 1(t), f 2(t)如图,求f 1(t)* f 2(t)6、 试求该周期信号的基波周期T ,基波角频率Ω,画出它的单边频谱图,并求f(t) 的平均功率。
⎪⎭⎫ ⎝⎛⎪⎭⎫ ⎝⎛-+--=63sin 41324cos 211)(ππππt t t f 周期信号7、若描述某系统的差分方程为y(k)+ 4y(k – 1) + 4y(k – 2) = f(k)已知初始条件y(0)=0,y(1)= – 1;激励f(k)=2k ,k ≥0。
求方程的全解。
8、某系统,已知当输入f(k)=(– 1/2)k ε(k)时,其零状态响应 求系统的单位序列响应h(k)和描述系统的差分方程。
9、某系统,已知当输入f(t)=e -t ε(t)时,其零状态响应如下 求系统的单位冲激响应h(k)和描述系统的微分方程。
10、如图复合系统由三个子系统组成,其中h1(k) = ε(k), h2(k) = ε(k – 5),求复合系统的单位序列响应h (k)11、如图电路,R=1Ω,C=1F ,以uC(t)为输出,求其h(t)C (t)12、已知信号信号流图如图,求其系统函数(利用梅森公式)。
13、如图所示电路,已知uS(t) = (t) V ,iS(t) =δ(t),起始状态uC(0-) =1V ,iL(0-) = 2A ,求电压u(t)。
信号与系统练习题——第6章

信号与系统练习题 第6章一、选择题1、()k δ的Z 变换是(A )A 、1B 、()δωC 、2()πδωD 、2π 2、已知一序列的Z 变换的收敛域为2z >,则该序列为(D )A 、有限长序列B 、反因果序列C 、双边序列D 、因果序列 3、序列1()4(1)()()4kkh k k k εε=--+的z 变换收敛域为 (C) A 、14z >B 、4z >C 、144z << D 、4z < 4、象函数()1ZF Z Z=-(1Z <)的原序列为(B )。
A 、(1)k ε--- B 、(1)k ε-- C 、()k ε- D 、()k ε 5、某LTI 离散时间系统的系统函数为65)(2+-=Z Z ZZ H ,该系统的单位响应=)(k h (F )。
A 、(23)(1)kkk ε--- ; B 、(23)()kkk ε-;C 、(32)(1)kkk ε---;D 、)()23(k kk ε-6、某因果序列()f k 的Z 变换为()5ZF Z Z =- (5Z >),则(0)f =(B )。
A 、 0 ; B 、 1 ; C 、 5 ; D 、 -0.2。
7、已知126)(22-+=z z z z F 5.0>z ,则原函数=)(k f (B ) A 、 )(])1(2)5.0[(k kkε-⋅+- B 、)(])1(25.0[k kkε-⋅+C 、 )(]25.0[k kε+ D 、)(]2)5.0[(k kε+-8、已知223()2z F z z z =+- 2z > ,则原函数=)(k f (A )。
A 、 [2(2)1]()kk ε-+ B 、)(])1(25.0[k kk ε-⋅+C 、 [0.51]()kk ε+ D 、[(2)1]()kk ε-+9、序列1()()2kf k =的z 变换及收敛域为(A ) A 、3()(21)(2)z F z z z =-- ,21<z <2 B 、3()(21)(2)F z z z -=-- ,z >2C 、3()(21)(2)z F z z z =--,z >2 D 、3()(21)(2)z F z z z -=-- ,21<z <210、已知一序列的Z 变换的收敛域为2z <,则该序列为(B )A 、有限长序列B 、反因果序列C 、双边序列D 、因果序列 11、已知一序列的Z 变换的收敛域为122z <<,则该序列为(C ) A 、有限长序列 B 、反因果序列 C 、双边序列 D 、因果序列 12、已知因果信号()f k 的单边Z 变换为()F z ,则信号(1)f k -的单边Z 变换为(C ) A 、1()(1)z F z f -+- B 、1()(1)z F z f --- C 、1()z F z - D 、()zF z13、已知信号()f k 的单边Z 变换为()F z ,则信号(1)f k -的单边Z 变换为(A )1()(1)z F z f -+- B 、1()(1)z F z f --- C 、1()z F z - D 、()zF z二、填空题1、离散信号)(2)(k k f kε-=的单边z 变换=)(z F 5.0z z-。
信号与系统练习题附答案
A、因果不稳定系统
B、非因果稳定系统
C、因果稳定系统
D、非因果不稳定系统
21 设连续时间线性系统的单位冲激响应为 h(t),系统的频率特性为 H ( j) H ( j) e j () ,信号通
过线性系统不失真的条件是( )
A. H ( j) 可以为任意函数,() t0
B. H ( j) 和() 都可以为任意函数
1 D. 2 (5 ) j
17.若收敛坐标落于原点,S 平面有半平面为收敛区,则( )
A. 该信号是有始有终信号
B. 该信号是按指数规律增长的信号
C. 该信号是按指数规律衰减的信号
D. 该信号的幅 度既不增长也不衰减而等于稳定值,或随时间 t,t n 成比例增长的信号
18.
F (s)
s(s 2
A.系统是线性的 B。系统是时不变的 C。系统是因果的 D。系统是稳定的
37.对于信号 f (t) sin 2t 的最小取样频率是 ( )
A.1 Hz
B。2 Hz
38.理想低通滤波器是( )
A.因果系统
C。4 Hz
B。物理可实现系统
D。8 Hz
C。非因果系统
D。响应不超前于激励发生的系统
39.长度为 M 的序列 x1[n] 与长度为 N 的序列 x2[n] 的卷积和 x1[n] * x2[n] 的序列的长度为(
C. e3t (t 1)
D。 e3t (t 3)
50.已知信号 f (t) 的傅氏变换为 F ( j), 则 f (3 t ) 的傅氏变换为( ) 2
A. 2F ( j2)e j3
B。 2F ( j2)e j3
C. 2F ( j2)e j6
D。 2F ( j2)e j6
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第一章绪论1、选择题1.1、f (5-2t )是如下运算的结果 CA 、 f (-2t )右移5B 、 f (-2t )左移5C 、 f (-2t )右移25D 、 f (-2t )左移25 1.2、f (t 0-a t )是如下运算的结果 C 。
A 、f (-a t )右移t 0;B 、f (-a t )左移t 0 ;C 、f (-a t )右移a t 0;D 、f (-a t )左移at 0 1.3、已知 系统的激励e(t)与响应r(t)的关系为:)()()(t u t e t r = 则该系统为 B 。
A 、线性时不变系统;B 、线性时变系统;C 、非线性时不变系统;D 、非线性时变系统 1.4、已知 系统的激励e(t)与响应r(t)的关系为:)()(2t e t r = 则该系统为 C 。
A 、线性时不变系统 B 、线性时变系统 C 、非线性时不变系统 D 、非线性时变系统 1.5、已知 系统的激励e(t)与响应r(t)的关系为:)1()(t e t r -= 则该系统为 B 。
A 、线性时不变系统B 、线性时变系统C 、非线性时不变系统D 、非线性时变系统1.6、已知 系统的激励e(t)与响应r(t)的关系为:)2()(t e t r = 则该系统为 B A 、线性时不变系统 B 、线性时变系统 C 、非线性时不变系统 D 、非线性时变系统 1.7.信号)34cos(3)(π+=t t x 的周期为 C 。
A 、π2 B 、π C 、2π D 、π21.8、信号)30cos()10cos(2)(t t t f -=的周期为: B 。
A 、15π B 、5π C 、π D 、10π1.9、dt t t )2(2cos 33+⎰-δπ等于 B 。
A.0 B.-1 C.2 D.-21.10、 若)(t x 是己录制声音的磁带,则下列表述错误的是: BA. )(t x -表示将此磁带倒转播放产生的信号B. )2(t x 表示将此磁带放音速度降低一半播放C. )(0t t x -表示将此磁带延迟0t 时间播放D. )(2t x 表示将磁带的音量放大一倍播放 1.11.=⋅)]([cos t u t dtdA A .)()(sin t t u t δ+⋅- B. t sin - C. )(t δ D.t cos1.12.信号t t t x o 2cos 4)304cos(3)(++=的周期为 B 。
A π2 B π C π5.0 D π/2 1.13.如果a>0,b>0,则f (b-a t )是如下运算的结果 C 。
A f (-a t )右移bB f (-a t )左移bC f (-a t )右移b/aD f (-a t )左移b/a 1.14.线性时不变系统的响应,下列说法错误的是 C 。
A 零状态响应是线性时不变的 B 零输入响应是线性时不变的 C 全响应是线性时不变的 D 强迫响应是线性时不变的 2、填空题与判断题2.1、=+t t 0cos )1(ωδ0cos )1(ωδ+t =⋅t t cos )(δ()t δ=--)2()cos 1(πδt t ()2t πδ-=⋅-at e t )(δ()t δ=-⋅)(cos )(0τωδt t 0cos()()t ωτδ⎰∞∞--=dt e t at )(δ 1=--⎰∞∞-dt t t )2()cos 1(πδ 1 ⎰+∞∞-=⋅tdt t cos )(δ 1⎰+∞∞-=tdt t 0cos )(ωδ 1 ⎰∞-=t d ττωτδ0cos )(()u t⎰+∞∞-=+tdt t 0cos )1(ωδ0cos ω⎰∞-=+td ττωτδ0cos )1(0cos (1)u t ω+⎰∞--=td e ττδτ)(()u t ⎰∞∞--=--dt t et t)1(][22δ21e--⎰∞∞--=dt e t at )(δ 1 ,2.2、任一信号f(t)与单位冲激信号)(t δ的关系为 ⎰∞∞--=dx t x x f t f )()()(δ,单位阶跃信号u(t)与单位冲激信号)(t δ的关系为u(t)= ⎰∞-td ττδ)(。
2.3、 任何信号都可以分解为偶分量与奇分量之和。
(√) 2.4、偶函数加上直流后仍为偶函数。
(√) 2.5、两个周期信号之和一定是周期信号 (×) 2.6.)cos()3sin()(t t t y π+=是周期信号。
(×)2.7.冲激响应为)2()(+=t t h δ的系统是线性时不变因果系统。
(×) 3、作图题3.1、绘出函数)]3()2([)(---=t u t u t t f 的波形。
2313.2、绘出函数)1()1()(--=t u t t f 的波形。
1-13.3、绘出函数)1()(-=t tu t f 的波形。
123.4、画出微分方程)()()()()(10012t e dtdb t e b t r a t r dt d a t r dt d +=++的仿真框图。
b 1⎰⎰∑∑-a 0-a 1b 0r(t)e(t)3.5、画出系统)()()()(2122t e t r a t r dt da t r dtd =++仿真框图。
⎰⎰∑-a 1-a 2r(t)e(t)3.6.画出微分方程)(6)(5)(4)(3)(2)(2233t e t e dtdt r t r dt d t r dt d t r dt d +=+++的仿真框图。
解:引入辅助函数)(t q ,得:)()(4)(3)(2)(2233t e t q t q dt dt q dt d t q dt d =+++)(6)(5)(t q t q dtdt r += ⎰⎰∑∑⎰e(t)r(t)''q 'q '''q -3-465-23.7.画出信号f (t )= 0.5(t+1)[u(t+1)-u(t-1)]的波形以及偶分量f e (t )与奇分量f o (t)波形。
f (t )-111 t3.8.画出信号f (t )= 0.25(t+2)[u(t+2)-u(t-2)]的波形以及偶分量f e (t )与奇分量f o (t)波形。
t2-2 1f (t )第二章连续时间系统的时域分析1、选择题2.若系统的起始状态为0,在e(t)的激励下,所得的响应为 D 。
A 强迫响应 B 稳态响应 C 暂态响应 D 零状态响应 3.线性系统响应满足以下规律 a 。
A)、若起始状态为零,则零输入响应为零。
B)、若起始状态为零,则零状态响应为零。
C)、若系统的零状态响应为零,则强迫响应也为零。
D)、若系统的起始状态为零,则系统的自由响应为零; 4.线性时不变系统输出中的自由响应的形式由 A 决定。
A 系统函数极点的位置B 激励信号的形式C 系统起始状态D 以上均不对。
5.线性时不变系统输出中的自由响应的形式由 B 决定。
A 激励信号B 齐次微分方程的特征根C 系统起始状态D 以上均不对 6.线性时不变稳定系统的自由响应是 C 。
A 零状态响应B 零输入响应C 瞬态响应D 稳态响应 7.对线性时不变系统的响应,下列说法错误的是 B 。
A 零状态响应是线性的B 全响应是线性的C 零输入响应是线性的D 零输入响应是自由响应一部分8.线性时不变系统的响应,下列说法错误的是 C 。
A 零状态响应是线性时不变的B 零输入响应是线性时不变的C 全响应是线性时不变的D 强迫响应是线性时不变的 2、判断题2.1线性常系数微分方程表示的系统,方程的齐次解称之自由响应,特解称之强迫响应。
(√)2.2.不同的系统具有不同的数学模型。
(×) 2.3若系统起始状态为零,则系统的零状态响应就是系统的强迫响应 ( × ) 2.4 零输入响应就是由输入信号产生的响应。
( × ) 2.5零状态响应是自由响应的一部分。
(×) 2.6.零输入响应称之为自由响应,零状态响应称之为强迫响应。
(×) 2.7当激励为冲激信号时,系统的全响应就是冲激响应。
(×) 2.8.当激励为阶跃信号时,系统的全响应就是阶跃响应。
(×)2.9.已知f 1(t)=u(t+1)-u(t-1),f 2(t)=u(t-1)-u(t-2),则f 1(t)*f 2(t)的非零值区间为(0,3)。
( √ )2.10.若f(t)=f 1(t)*f 2(t),则有f(t)=f 1(2t)*f 2(2t)。
(×)2.11.若)(*)()(t h t e t r =,则有)(*)()(000t t h t t e t t r --=-。
(×) 2.12.线性时不变系统的全响应是线性的。
(× ) 2.14.线性常系数微分方程表示的系统,方程的齐次解称为自由响应。
(√) 2.15.线性时不变系统的响应具有可分解性。
(√)2.16.系统的零输入响应等于该系统的自由响应。
(×) 2.17.因果系统没有输入就没有输出,因而因果系统的零输入响应为零。
(×) 2.18.线性时不变系统的零状态响应是线性时不变的。
(√)2.19.卷积的方法只适用于线性时不变系统的分析。
(√)2.20 如果)(1t f 和)(2t f 均为奇函数,则)(*)(21t f t f 为偶函数。
(√)3、填空题3.1已知一连续LTI 系统的单位阶跃响应为)()(3t u e t g t -=,则该系统的单位冲激响应为:h(t)=)(3)(3t u e t t --δ。
3.2=)](*)([t u t u dt d ()u t =*)]()([t tu t u dt d ()tu t =⎥⎦⎤⎢⎣⎡⎰∞-t d u t u dt d λλ)(*)(()tu t =-)](*)([t u t u e dtdt ()t e u t -=-)(cos *)(0τωδt t 0cos ()t ωτ-=-t e t *)(δt e -=+t t 0cos *)1(ωδ0cos (1)t ω+3.3 一起始储能为零的系统,当输入为 u (t)时,系统响应为3()t e u t -,则当输入为δ(t )时,系统的响应为3()3()t t e u t δ--。
已知系统的单位阶跃响应为)1(10)()1(-=--t u e t g t ,则激励)1(2)(-=t t f δ的零状态响应=)(t rz s )3(10)3(20)3(-----t u e t t δ_。
4计算题例2-8 已知系统微分方程为)(3)(3)(t e t r t r dtd =+,若起始状态为23)0(=-r ,激励信号)()(t u t e =,求系统的自由响应和强迫响应、零输入响应和零状态响应。