022_罗经误差记录薄的检查
第二章陀螺罗经误差及其消除.
W
E
arv
•因此而产生了一个方位偏 差—速度误差(arv)。
三、速度误差的数学表达式及速度误差的特性
根据V3=V1有: H V CosC/Re = H 1 arv 则:arv=VCosC/Re eCos V3 V3 u3 u2 r V2 u2 r V2 V1 u3 E W
VcosC α rv R e ωe cos
w对主轴的影响:
主轴
VN 2 1
e
使水平面北端 不断下沉,而主轴 指北端由于定轴性, 故产生了相对水平 面不断上升的视运 动线速度。
W
W
V3=H
W
=H VCosC/Re
以北纬下重式罗经为例:
V3 V3 u3 u2 r V2 u2 r V2 u3 V1
•V3打破了原有的平衡, 迫使主轴必须偏向子午 面的西侧,利用西降的 视运动(V1)与V3抵消。
电航仪器
大连航运职业技术学院
第二章 陀螺罗经误差及其消除
重点是使学生清晰理解船用陀螺罗经的误差, 了解在航海实践中的消除及补偿方法 • • • • 第一节 纬度误差 第二节 速度误差 第三节 冲击误差 第四节 其他误差
概 述
• 陀螺罗经误差:陀螺罗经的主轴在方位上 偏离地理真北方向的角度。 • 陀螺罗经误差有:纬度误差、速度误差、 冲击误差、摇摆误差、基线误差。
BI在加速终了后经过约3/4个TD (约1小时)自动消失。
rv:速度误差 BZ:冲击位移 BI:冲击误差
不产生第一类冲击误差的舒拉条件:
当罗经的等幅摆动周期等于一摆长为地球半径 的数学摆的摆动周期时,不产生第一类冲击误差。
Re H T0 2 2 84.4 min M e c船偏北航行,航速V、
罗经差的测定
测罗经差——太阳真出没法
太阳真出没、视出没和低高度比较
end
测罗经差——太阳真出没法
主要步骤 • 观测太阳真出没的罗方位 • 根据太阳赤纬和测者纬度计算或查表求太阳真出没 的真方位 • 求得罗经差
C TB CB
测罗经差—太阳真出没公式
计算器计算太阳真出没方位公式:
cos A sin cos
纬度从 0~30° 纬度从30~64°
《太阳方位表》查表引数为:纬度、赤纬和视时
《太阳方位表》的优点:不需要配备《航海天文历》
低高度太阳法——计算法求真方位
计算式
tgA c
sin(tG EW ) tg cos sincos(tG
EW )
• 式中:
δ、tG为太阳的赤纬和格林时角,它们可以根 据观测时间查《航海天文历》求得;
end
测罗经差——低高度太阳法
工作程序
1)观测太阳罗方位,记录观测时间 2)求太阳真方位 3)计算罗经差
C TB CB
end
低高度太阳法——真方位的求取
求取真方位的方法有三种:
•《航海天文历》 + 函数计算器 •《太阳方位表》 •《航海天文历》 + 《B105表》
《太阳方位表》分上下册; 上册为(Daris’s戴氏表) 下册为(Burdwood’s戴氏表)
观测太阳真出没求罗经差 优点:不需要计时,计算简单 缺点:受时间限制
观测北极星方位求罗经差
在北纬中、低纬度海区所见北极星在周日视运动中 方位角变化范围<2°。
根据测者纬度和春分点地方时角查《航海天文历》 中“北极星方位表”求差θ
当罗经倾斜方向与天体方位垂直时,罗经倾斜引起的观测 方位误差为最大。
航海仪器课件:陀螺罗经误差及消除
arv1
v cosc1
ReWe cos
20 cos00 900 cos 450
570
3
10
8(W )
arv 2
v cosc2
ReWe cos
20 cos1800 900 cos 450
570
3
10
8( E )
BI
(arv 2
arv1
)( cos cos0
1)
(10
8 10
8)(cos 450 cos 60 0
即 M r H2 , M D r H1 r
得
r
r
M D tg
M
H 2
M
r
r
Kz tg
Kr
H2
Kr
误差大小与罗经的结构参数有关,且随纬度的增大而增大。 北纬偏东误差(+),南纬偏西误差(-)。 采用短轴阻尼法的罗经特有的误差
三.补偿法
外补偿法:转动罗经基线或刻度盘 ,转动基线的方向与误差 方向相同,角度相等。转动刻度盘使零刻度位于子午面内, 方向与误差方向相反,角度相等。 内补偿法:利用电气解算装置输出按纬度误差变化的电信号, 对罗经施加补偿力矩,使主轴返回子午面,从根本上消除纬 度误差。
纬度误差补偿后主轴的稳定位置:
MK-37型
r 0
r
H2
M
阿玛布朗型
r 0
r 0
解释(北纬):
由于纬度误差是在垂直轴施加阻尼力矩引起。因此主轴指北
端需偏转一个角度产生v1来平衡阻尼线速度U3。
MK-37型罗经在其垂直轴负向施加补偿力矩,将使主轴指北 端产生向上的补偿进动线速度U’3来平衡U3 (相当于V1平衡的U3由 U’3代替) ,最终使U3与 U’3 等值反向,u2与 v2 等值反向,使罗经主 轴在高度上相对水平面稳定。
02陀螺罗经误差

2. 第二类冲击误差 作用于阻尼设备上的惯性力产生的惯性力矩使罗经 产生的冲击误差称为第二类冲击误差。 经分析,摆式罗经第二类冲击误差BⅡ特点: ① 当船舶所在纬度低于设计纬度时(ϕ <ϕ 0), 第二类冲击误差和第一类冲击误差的符号相反; ② 当船舶所在纬度高于设计纬度时(ϕ >ϕ 0 ), 第二类冲击误差和第一类冲击误差的符号相同。 船舶机动时,总的冲击误差B = BⅠ+ BⅡ, ① 当ϕ <ϕ 0,BⅠ与BⅡ符号相反,总的冲击误差B 减小; ② 当ϕ >ϕ 0 ,BⅠ与BⅡ符号相同,总的冲击误差B 增大。 所以在船舶机动时,应关闭阻尼器。
第四节 摇摆误差
摇摆误差:是指船舶摇摆时呈周期性变化的惯性力作用于 陀螺罗经的重力控制设备而产生的指向误差。 1. 产生原因: 船舶摇摆时呈周期性变化的惯性力的作用 摇摆误差与罗经的结构参数、安装位置、纬度、摇摆 状态、摇摆方向等参数有关,特别是船舶沿隅点航向 (045、135、225、315)航行且横摇时,误差最大。 2. 误差处理:在结构上采取有效措施来消减摇摆误差 1)安许茨系列:采用双转子 2)斯伯利系列:液体流动周期远远大于船舶摇摆周期 3)阿玛勃朗系列:敏感主轴高度角的电磁摆内充满粘性很大的 硅油,对摆锤进行强阻尼,使电磁摆不随船舶摇摆
当罗经结构参数M、H 为定值时,只有在某一特定纬度ϕ0上 才能满足舒拉条件,这一特定纬度ϕ0称为罗经的设计纬度。
BI = BZ − Δαrv =
M ⋅Δ V − N H⋅ g
Reωe⋅cosϕ
1
⋅ Δ VN
2. 若BZ > Δαrv ,则BI > 0。 说明主轴偏在新稳定位置r2 的西面,机动结束后主轴将作 减幅摆动,最后停在新的稳定位置r2 。 若ΔVN > 0,产生此种情况时的船舶所在纬度小于设计纬度, 即ϕ <ϕ 0。 3. 若BZ < Δαrv ,则BI < 0。 说明主轴偏在新稳定位置r2 的东面,机动结束后主轴将作 减幅摆动,最后停在新的稳定位置r2 。 若ΔVN > 0,产生此种情况时的船舶所在纬度大于设计纬度, 即ϕ >ϕ 0。
第二章陀螺罗经误差分析
五、速度误差的消除
3.内补偿法:施加补偿力矩。 V3
r
V1`
V2
•可施加垂直轴补 偿力矩,产生V1` (E) 以抵消V3。
第二节
冲 击 误 差(Ballistic error)
一、冲击误差的定义:
船舶在机动航行过程中,由于惯性对 陀螺罗经的影响而引起的误差。
V1 u2 r r (W)
三、纬度误差的大小与方向 由:V1=u3 , V2=u2
V2 u3
有:H1 αr=MDθr
H 2=-M θr
(E) (方位误差)
α
求得: αr =-MD/M tg
二、纬度误差的性质:
αr Φ =-MD/M tgΦ
1.采用垂直轴阻尼法的罗经所具有的误差。
2.北纬偏东误差,南纬偏西误差。 3.误差大小随纬度的增大而增大。
第二章 陀螺罗经误差及其消除
第二节 速 度 误 差(speed error)
•V3打破了原有的平衡, 迫使主轴必须偏向子午 面的西侧,利用西降的 视运动(V1)与V3抵消。
以北纬下重式罗经为例: V3 u2 r V2 u2 r V1
V3
V2
( W)
(E)
arv
•因此而产生了一个方位 偏差—速度误差(arv)。
u2
( W)
r
u3
V2 u2 r
V2
u3 (E)
αr Φ
V1 u2 V2` (W)
r
u3
V2 (E)
r
V2
B.施加水平轴 补偿力矩;
第二章 陀螺罗经误差及其消除
第二节 速 度 误 差(speed error)
12.0 罗经差的测定

所以观测时罗经面尽量保持水平,并且测低高度天体
四、 利用天体方位求罗经差
2、观测天体求罗经差的注意事项
1)应观测低高度天体,应低于30°,
最好小于15°
2)观测时尽量保持罗经面水平。
3)应连续观测三次,取平均,以减少随机误差
4)应观测天体的中心方位。
四、 利用天体方位求罗经差
3、观测天体求罗经差的方法
1、将磁罗经和陀螺罗经进行比对,求磁罗经差,
远航中至少每4h、改变航向后比对一次;
求该航向上磁罗经差的大小。
及时发现陀螺罗经在航行过程中是否工作正常.
2、航向比对求罗经差公式
△C=GC+△G—CC
五、航向比对求罗经差
3、用航向比对法求自差的步骤
1)读取陀螺罗航向
2)读取同一时刻的磁罗航向 3)求罗经差△C
观测太阳低高度(h低于30°)方位 观测太阳真出没方位 观测北极星方位
3.航向比对法求罗经差
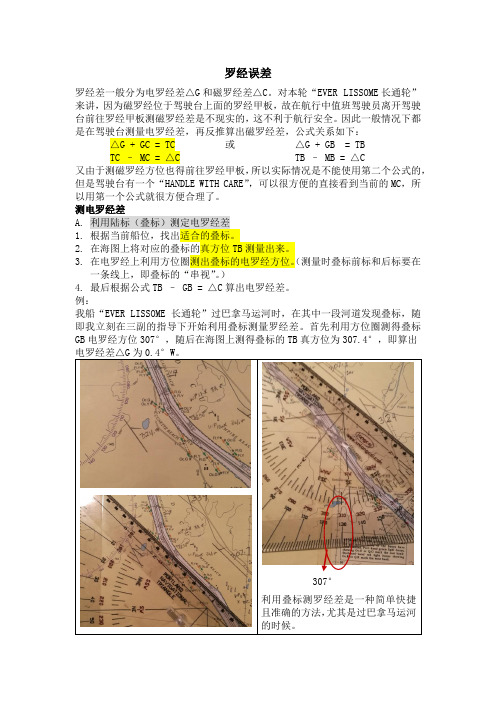
三、观测陆标方位求罗经差
1.观测叠标方位求罗经差步骤:
两叠标的TB由海图上量得
两叠标间罗方位由罗经测得 C=TB-CB
TB
后叠标 前叠标
2.观测远距离单物标方位求罗经差
前提:有一个准确船位,一个远物标
综上所述:
1)观测太阳低高度方位求罗经差(h<30°) 2)观测太阳真出没方位求罗经差(h=2/3 D) 3)观测北极星方位求罗经差(北极附近)
四、 利用天体方位求罗经差
4、观测太阳低高度方位求罗经差(h<30°)
1) 观测步骤
• 观测太阳罗方位CB,并记下时间
• 求观测时刻太阳低高的计算方位Ac(公式法)
NC C 10°E
标准罗经误差记录簿
标准罗经误差记录簿Standard compass error record bookM.V.编号: 1 No.: 1自年月日至年月日FM TO根据《1978年海员培训、发证和值班标准国际公约马尼拉修正案》附件2附则A部分第八章关于值班的标准第34条规定:负责航行值班的高级船员应做定期检查,以确保:.1 舵工或自动舵正操作在正确的航向上;.2 标准罗经误差每班至少测定一次,如可能,在任何大幅度改向后也应测定;标准罗经和陀螺罗经应经常进行核对,罗经复示仪与主罗经同步;.3 自动舵至少每班手动测试一次;.4 航行灯和信号灯及其他航行设备正常工作;.5 无线电设备按照本节第86条规定正常工作;以及.6 无人机舱(UMS)控制装置、报警和指示器工作正常。
According to THE MANILA AMENDMENTS TO STCW CONVENTION ANNEX PART A Chapter VIII paragraph 34:The officer in charge of the navigational watch shall make regular checks to ensure that:.1 the person steering the ship or the automatic pilot is steering the correct course;.2 the standard compass error is determined at least once a watch and,when possible,after any major alteration of course;the standard and gyro compasses are frequently compared and repeaters are synchronized with their master compass;.3 the automatic pilot is tested manually at least once a watch;.4 the navigation and signal lights and other navigational equipment are functioning properly;.5 the radio equipment is functioning properly in accordance with paragraph 86 of this section;And.6 the UMS controls.alarms and indicators are functioning properly.测定罗经差的方法一、利用陆标测定罗经差(Observe a natural or artificial range)TB在海图上量取CB在航行中观测ΔC = TB - CB二、陀螺罗经航向比对法求罗经差(Comparing the ship’s heading while give gyro error)已知陀螺罗经误差的情况下,同时观测陀螺罗经和标准罗经读数,求出磁罗经误差TC = GC + ΔGΔC = GC + ΔG - CC三、利用天体测定罗经差(Celestial methods)罗方位CB——用罗经观测太阳或星体得到;真方位TB——以天体的计算方位A C代替。
罗经误差
○3 接下来就根据正确的天体格林时角 GHA 和天体赤纬 Dec 算出正确的天体地方 时角 LHA 和天体赤纬 Dec。
○4 因为纬度为 13-05.9N,所以根据算出来的正确的天体地方时角 LHA 和天体赤 纬 Dec 在 0°-15°的《SIGHT REDUCTION TABLE FOR MARINE NAVIGATION》书中 查找 LHA 和 Dec 相邻对应的 Z。
或
△G + GB = TB
TC – MC = △C
TB – MB = △C
又由于测磁罗经方位也得前往罗经甲板,所以实际情况是不能使用第二个公式的,
但是驾驶台有一个“HANDLE WITH CARE”,可以很方便的直接看到当前的 MC,所
以用第一个公式就很方便合理了。
测电罗经差
A. 利用陆标(叠标)测定电罗经差
3. 电罗经差△G 即为 Z(TB)-GB。 如何正确观测低高度太阳方位 ○1 首先观测时太阳要是低高度的(h<30°)。 ○2 方位圈要放水平,即可以看到两滴水珠位于中央。 ○3 读数要准确。
如何求取太阳计算方位 Z ○1 首先根据记录的观测时间在《航海天文历》中查出对应的天体格林时角 GHA 和 天体赤纬 Dec,然后由此算出正确的天体地方时角 LHA 和正确的天体赤纬 Dec。 ○2 由计算出来的天体地方时角 LHA 和天体赤纬 Dec 在《SIGHT REDUCTION TABLE FOR MARINE NAVIGATION》书中查出 Z,再根据内差算出正确的 Z。 例: UTC 23-Jun-2018,04:13:07 我利用早上升起的太阳进行了一次电罗经差的测定。 ○1 首先获取基本信息:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
澳大利亚港口国船舶安全检查动态
2014年第003期,总第022期
《罗经误差记录簿》的检查提示
一、关于标准罗经的误差测定,在STCW公约上有明确的规定:要求值班驾驶员对磁罗经进行定期核查,以确保:
a)每次值班至少对标准罗经误差进行一次测定;
b)可能时,航向作任何重大更改后进行此种测定;
c)经常将标准罗经与电罗经进行比较,使复示器与主罗经同
步。
二、船舶航行中,值班驾驶员应经常以天体或陆标方位等测定自查。
并将测定的日期、时间、地点、船首方向、天体或陆标罗经方位及其真方位和测定的误差等记入《罗经误差记录簿》。
若因条件不许可,不能进行测定,值班驾驶员应在《罗经误差记录簿》上记载原因,如:天气状况不适合,交通状况不允许等。
所测定的罗经自差与“罗经自差表”或经常测定的度数相差悬殊时;或者罗经自差在一个或多个航向上大于5 度时,驾驶员应报告船长,需要对磁罗经进行校差。
三、日常检查中,罗经误差记录簿通常存在如下主要缺陷:
1.记录簿没有每班记载,也没有说明原因;
2. 记载的内容过于简单,缺少船舶方位等细节;
3. 罗经误差过大,超过规定,但未见对罗经进行校准。
4、对应信息与《航海日志》不一致。
PSCO如果发现《磁罗经误差记录簿》普遍存上述缺陷时,将会滞留船舶。
四、作为对应的预防措施,值班驾驶员应:
1.每个航行班均需要检查磁罗经,并和电罗经进行比较。
2.测定的罗经误差应记录在《磁罗经误差记录簿》中。
3.任何校差的日期和其他细节均需在《磁罗经误差记录簿》中
记载。
4.所有信息应与《航海日志》完全一致。
CCS澳大利亚办事处
2014年3月3日。