飞行程序设计8(直角航线)
飞行程序设计大纲

《飞行程序设计》课程考试大纲课程名称:《飞行程序设计》课程代码:0800第一部分课程性质与目标一、课程性质与特点《飞行程序设计》是高等教育自学考试交通运输专业独立本科段的一门专业课,是本专业学生学习和掌握空域规划和设计基本理论和方法的课程。
设置本课程的目的是使学生从理论和实践上掌握以NDB、VOR、ILS等设备作为航迹引导设备时,离场程序、进场程序、进近程序、复飞程序和等待程序,以及航路的设计原理和方法。
通过对本课程的学习,使学生熟练掌握目视与仪表飞行程序设计的有关知识,使之能独立完成有关机场的飞行程序设计和优化调整。
二、课程设置目的与基本要求了解飞行程序的总体结构、设计方法;了解飞行程序的分类原则;掌握飞行程序设计的基本准则;能够独立完成有关机场的飞行程序设计和优化调整。
本课程的基本要求如下:1.了解飞行程序的基本结构和基本概念。
2.了解终端区内定位点的定位方法、定位容差和定位的有关限制。
3.了解离场程序的基本概念,掌握直线离场、指定高度转弯离场、指定点转弯离场和全向离场的航迹设计准则、保护区的确定方法、超障余度和最小净爬升梯度的计算方法,以及相应的调整方法;4.掌握航路设计的国际民航组织标准和我国的标准;5.掌握进近程序各个航段的航迹设置准则;6.掌握各种情况下,进近程序各个航段保护区的确定原则;7.掌握进近程序各个航段超障余度和超障高度的计算方法;8.掌握进近各个航段下降梯度的规定,以及梯度超过标准时的调整方法。
9.掌握基线转弯程序的基本概念,出航时间的确定方法,保护区的确定原则,超障余度和超障高度的计算方法;10.掌握直角航线的基本概念,出航时间的确定方法,保护区的确定原则,超障余度和超障高度的计算方法;11.掌握ILS进近的基本概念,精密航段障碍物评价方法,以及超障高度的计算方法;12.了解等待程序的基本概念,掌握保护区的确定方法,以及超障余度和超障高度的计算方法;13.了解区域导航程序设计的基本概念。
《空中领航学》7.3.3沿直角航线飞行

MC出和MC入;
三个高度:
(550)
起始进近高度、 入航转弯开始高度、 第二次过台高度。
P275
7.3.3.2 直角航线飞行数据
2)结合机型的计算数据
飞行员在按照仪表进近图公布的数据飞行时,必须 掌握所飞机型进近时的程序宽度、长度、正切起始进近 定位点(是一个电台)的无线电方位、出航航迹的下降 率、入航转弯开始位置的无线电方位、四转弯开始(剩 余航向90°)位置的无线电方位。飞行实施中,应当根 据所飞机型的进近速度、转弯坡度或转弯率,按仪表进 近图公布的进近程序数据进行计算。
当飞机进入入航转弯时机的方位线时,参考飞机出航时 间与应该飞行的时间相比较即可确定。当t出>t应,直角航线 变宽变长;当t出<t应,直角航线变窄变短。
4)出航航迹的检查方法 (2)无线电方位配合DME检查
Δt=(t出+t90°)WS1/GS=(t出+t90°)WS1/(TAS±WS1)
既定的程序、机型,其t出、TAS是一定的,计算出不同 WS1所对应的Δt,就可确定出时间的心算系数。
⑶修正风对入航转弯的影响
由于出航转弯速度与入航转弯速度不同,TAS出>TAS入, 因此飞机入航转弯转90°改平直线飞一段距离2(R出-R入)然 后再转90°切入到五边上。入航转弯中同样要受到风的影响, 必须对风进行修正
4)出航航迹的检查方法
直角航线飞行中对程序的宽度和长度的准确判断 十分重要,是正确做好入航转弯和五边飞行的前提, 因此飞行中必须对出航航迹进行检查。
4)出航航迹的检查方法 (1)无线电方位配合出航时间检查。
利用地面NDB/VOR台,测量出飞机与电台的无线电方位, 同时参考出航时间来判断出航航迹,即可判断直角航线的宽 窄和长短。
飞机增雨作业“8”字型航线设计探讨

干 旱 气 象
JournalofAridMeteorology
Vol.36 No.1 Feb,2018
王 俊,王 庆,龚佃利.飞机增雨作业“8”字型航线设计探讨[J].干旱气象,2018,36(1):136-140,[WANGJun,WANGQing,GONGDianli. The“8”FontFlightCourseProjectofPrecipitationEnhancementbyAircraft[J].JournalofAridMeteorology,2018,36(1):136-140],DOI:10. 11755/j.issn.1006-7639(2018)-01-0136
第 1期
王 俊等:飞机增雨作业“8”字型航线设计探讨
137
潜力,则为了最大可能地对云系进行催化,最佳催化 航线选择平行条航线(图 1),每段航线长度一般在 50~100km。当催化航线间距 dzj等于单条航线催 化剂扩散宽度(一般为 5~10km)时,人工冰核经扩 散后,一定浓度的催化区域经过合并连接,可以产生 成片的催化作业区域,这称之为无缝隙催化原则,dzj 称为催化航线最佳间距。
分产品的分辨率为 1.0km,在大片回波中跟踪分析 10.0km宽度回波的变化是不容易的。而 FY-2系列 静止气象卫星可见光资料的星下点分辨率是 1.25km、 红外资料是 5.0km[13],所以要检测一条 10km宽的 催化剂扩散区,在红外产品上只有 1~2个点,可见 光产品上也就 10个点左右。对于机载观测,目前 “运 -7”飞机巡航速度约 420km·h-1,垂直穿过 10.0km宽的目标云仅需要 86s。由于单线源的扩 散宽度很窄,不利于观测设备进行追踪观测。因此, 如果通过合理的飞机作业航线设计,使得催化剂的扩 散区域能连接在一起,形成尺度较大的催化影响区, 则有利于效果的检验和分析。数值研究表明,合适的 间距还有利于线源间的合并,增加作业效果[14-15]。
飞行程序设计-第15章-直角航线及等待

中国民航大学空中交通管理学院
中国民航大学空中交通管理学院
2.全向进入保护区
全向进入保护区是在基本保护区的基础上,增加为不同方向进 入的航空器提供保护所需的区域。 采用全向进入时,程序起始点必须是一个导航台 。
中国民航大学空中交通管理学院
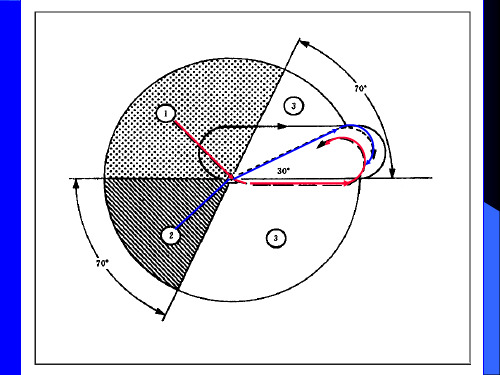
飞越VOR台的全向进入区绘制以“A”为圆心,通过“A1”和 “A3”画圆。 模板上“E”点放在圆上一系列点(模板轴线与入航航迹平 行),在圆上每一个点沿C、D轴方向的模板边界画曲线, 这些曲线的包线即为曲线“5”。 画第1扇区和第3扇区分界线(该线与入航航迹成70°夹 角),模板轴线放在分界线上,用模板画出VOR或NDB的 进入定位容差区E1 E2 E3 E4。 模板“a”点放在E1和E3(模板轴线与第1扇区和第3扇区分界 线平行),画曲线“6”和“7”及其共切线。 以“A”为圆心,画圆弧与曲线“6”相切直至与曲线“1”相交。 曲线“8”是以70°分界线为对称轴,曲线“6”和“7”的对称曲 线。画“5”、“6”、“7”和“8”曲线的公切线。
中国民航大学空中交通管理学院
b)出航航段在D轴方向的保护,是由“g”、“i3”和“i4”为 圆心的圆弧的共切线表示,称为“3”线。 c)转弯大于180°的保护为: 1)以“c”、“d”、“e”、“f”为圆心的圆弧的螺旋包线和过 “a”点的这条螺旋线的切线; 2)以“h”、“o”和“p”为圆心的圆弧的螺旋包线和此螺旋线 与在Wg和Wh基础上画出的出航转弯末端区域的切线。
中国民航大学空中交通管理学院
公式 对3 050m高度和ISA+15℃的换算因数
数值 1.196 0 455.38 km/h 0.134 6 km/s 取较小值 1.95°/s 3.96 km 3.05 123.6km/h 0.034 33 km/s 0.792 km 60 s 8.08 km 0.67 km 1.48 km 7.04 km 10.90 km
飞行程序复习-含课程设计111031

目视和仪表飞行程序设计 课程设计
• 4、 基线转弯程序,B类飞机,起始高度
1850M,出航时间T=2分钟,IAF为NDB。 请绘制出保护区。(比例尺:1:10万)
• 5、Ⅰ类ILS,标准条件,请绘制基本ILS
面的平面图。(比例尺1:10万)
定义:一个以进近航迹为对称轴的区域,并分为主 区和付区,在进近航迹两侧,主、付区各占总区 域宽度的一半。
各航段保护区的衔接
2.2.2 最小超障余度(MOC)
定义:飞越安全保护区内的障碍物上空时, 保证飞机不致与障碍物相撞的垂直间隔。
➢ 各航段的MOC
起始进近 中间进近 最后进近(有FAF) (无FAF)
提供航迹引导
NDB
±6.9°
VOR
±5.2°
LLZ(ILS)
±2.4°
DME:±(0.25nm+D*1.25%)
TAR(37km/20nm内): ±1.6km RSR(74km/40nm内): ±3.2km
提供侧方定位 ±6.2° ±4.5° -
交叉定位的容差
➢ 扇区的划分
以归航电台为中心,46km为半径,按罗盘 象限或地形划分,然后在边界外加9km的缓 冲区。
VOR/DME(呼号GHN),划分为三个扇区,边界 的航线角分别为:015°、095°、175°。(比 例尺1:50万)。
• 3、中间和最后进近航段均在跑道中心延长线上,
起始与中间进近航段的切入角为45°,MAPt距跑 道入口1KM,安装有VOR/DME台,FAF距MAPt 为8KM,IF距FAF为12KM,IAF距IF为15KM, 比例尺1:10万,请绘制各进近航段的保护区图。
主区 300M 150M 75M 90M
无人机操控技术 教案12:固定翼的水平8字航线

注意:1、8字航线不得出现过大偏差,可以地面物体为参照物,保证航线组成形状。
2、转弯应为圆弧形航线,不得出现急转弯、掉高现象。
3、转弯时机、舵量把握准确。
4、8字航线飞行中高度应保持一致。
5、飞行中到达某一点时,要保证飞机姿态符合上述要求,如右侧机翼正对操控者、左侧机翼正对操控者等。
6、不得存在错舵现象。
今天的课就上到这里,我们下次课再见。三 Nhomakorabea本节小结
1.无人机水平8字航线的概念;
2.无人机水平8字航线的特点;
3.无人机水平8字航线的主要组成部分。
方法手段
讲授法
布置作业
1.分组完成无人机水平8字航线的阐述;
2.复习所学内容,下次课进行课前测。
课后体会
内容简单,学生比较容易接受。
二、课程内容
水平8字训练A点是两圆相切点,从A点柔和地向左打副翼,同时方向舵配合转弯,使飞机进人一个较小的角度执行转向前飞的操作,并通过油门和升降舵的配合,保证飞机的高度一致。
在到达B点时稍微回打副翼,根据航线半径的大小进行调整。固定翼无人机左侧机翼正对操控者。继续执行与上步同向的转向操作,并保持高度一致,即将到达C点时适当回舵,使飞机减小转向角度,此时固定翼无人机机头正对操控者。经过C点后继续执行转向操作飞至D点。到达D点后右侧机翼正对操控者。经过第4点后同样执行转向动作飞至A点。
主要内容
一、课程引入
固定翼翼的水平8字是一个经常用于练习的航线。航线由两个圆形组成,这两个圆形相切,相切的点就是A点。两个圆形组成了一个8字,这就是8字航线。在练习之前,我们需要在空中找到7个点位,A点就是航线相切点,在起降点的左边和右边各画一个圆,作为航线,在圆的四个相对的方向上确定三个点,加上起降点就分割整个圆的四个部分。这四个点就是每个圆的必经点位。
飞行程序设计8(直角航线)PPT课件

飞行速度的确定
根据飞行任务和气象条件选择合适的飞行速度
飞行速度对飞行安全和效率有重要影响,应根据任务需求和气象条件选择合适的飞行速度 。
保持稳定的速度
在飞行过程中,应尽量保持稳定的飞行速度,避免因速度波动引起的安全隐患。
调整飞行速度以适应突发情况
在遇到突发情况时,应及时调整飞行速度,以确保飞机的安全。
飞行员需要关注天气情况,特别是风向、风速、云层、气压等 气象要素,以便应对突发天气变化。
降落阶段的操作
确认降落场
在降落前,飞行员需要确认降 落场的大小、跑道长度、障碍 物等情况,确保符合降落要求
。
降落前检查
按照规定的检查单,对飞机的 各项设备进行降落前的最后检 查,确保安全无误。
降落操作
在降落过程中,飞行员需要控 制飞机的速度、高度和方向, 使飞机平稳地着陆在跑道上。
飞行阶段的操作
保持飞行高度 导航与监控 通信与协调 气象监控
在飞行过程中,飞行员需要保持飞机在规定的高度飞行,避免 与障碍物碰撞。
飞行员需要使用导航设备,确保飞机按照预定的航线飞行,同 时监控飞机状态和周围环境,及时发现并处理异常情况。
飞行员需要与其他飞机和地面管制员保持密切联系,及时传递 信息和接受指令,确保飞行安全。
05
直角航线飞行程序设计 案例分析
案例一:某航空公司直角航线设计
总结词
高效、经济、安全
详细描述
某航空公司在进行航线设计时,充分考虑了直角航线的优势,通过优化飞行路径,提高了飞行效率,减少了燃油 消耗,确保了航班的安全。
案例二:某机场直角航线优化
总结词
便捷、快速、可靠
详细描述
某机场通过优化直角航线,提高了航 班的准点率和机场的运营效率。同时 ,优化后的航线更便捷、快速、可靠 ,为旅客提供了更好的出行体验。
飞行程序设计8(直角航线)资料
驾驶员反映时间:0至6秒; 建立坡度时间:5秒; 出航计时容差:±10秒; 无航迹引导时航向保持容差:±5°。
二、模板的绘制及计算
f gh o p
e dE
cb a
i1 i3
n3
i2 j
i4
k
l
m n4
D
r+ (t + 15 )×TAS + r+ (11+ t + 15 + 180°/R)×W XE = 2r +(t + 15 )TAS + (t + 26 + 180°/R)W
第三节 保护区 一、基本保护区
基本保护区是规定航空器从入航边进入,只考虑程序 起始点定位容差而确定的保护区。
二、全向进入保护区 全向进入保护区是在基本保护区的基础上,增加为不 同方向进入的航空器提供保护所需的区域。采用全向 进入时,程序起始点必须是一个导航台 。
第五章 非精密直角航线程序设计
三、保护区的缩减 1.程序起始点安装导航台,并限制航空器不得从第1扇区 进入。 2.利用侧方导航台的径向/方位线,或DME弧限制出航 边长度。 3.用限制进入路线缩减直角或等待程序的保护区 4.限制使用程序的航空器的类型或最大使用速度 5.采用减小出航时间,飞行两圈的方法
以VOR交叉定位或VOR/DME定位点作为等待点的等 待程序,应尽可能按径向线进入
第四节 等待程序设计
三、等待程序航空器的指示空速
高
度
正常条件
颠簸条件
4250m(14000ft)(含)以下
4250m(14000ft)— 6100m(20000ft)(含) 6100m(20000ft)— 10350m(34000ft)(含) 10350m(34000ft)以上
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第一节 概述 直角航线程序具有使用导航设备少,无进入方向限制的特 点。 1.当起始、中间进近航段航迹对正超出规定的范围; 2.航段长度小于最小长度限制; 3.使用反向程序时,进入航线超出进入扇区的界线; 4. 作为备用。 一、直角航线程序的结构与术语 二、直角航线程序的进入程序
h)定位容差: i)飞行技术容差:包括 驾驶员反映时间:0至6秒; 建立坡度时间:5秒; 出航计时容差:±10秒; 无航迹引导时航向保持容差:±5°。
二、模板的绘制及计算
i1 f e d g h o p i3
i2
n3 n4 m
D
r+ (t + 15 )×TAS + r+ (11+ t + 15 + 180°/R)×W XE = 2r +(t + 15 )TAS + (t + 26 + 180°/R)W
第三节 保护区 一、基本保护区 基本保护区是规定航空器从入航边进入,只考虑程序 起始点定位容差而确定的保护区。 二、全向进入保护区 全向进入保护区是在基本保护区的基础上,增加为不 同方向进入的航空器提供保护所需的区域。采用全向 进入时,程序起始点必须是一个导航台 。
第五章 非精密直角航线程序设计
三、保护区的缩减 1.程序起始点安装导航台,并限制航空器不得从第1扇区 进入。 2.利用侧方导航台的径向/方位线,或DME弧限制出航 边长度。 3.用限制进入路线缩减直角或等待程序的保护区 4.限制使用程序的航空器的类型或最大使用速度 5.采用减小出航时间,飞行两圈的方法 四、反向和直角程序的简化保护区画法
第四节 等待程序设计
三、等待程序航空器的指示空速 高 度 正 常 条 件 颠 簸 条 件
4250m(14000ft)(含)以下
4250m(14000ft)— 6100m(20000ft)(含) 6100m(20000ft)— 10350m(34000ft)(含)
10350m(34000ft)以上
425km/h 520km/h 315km/h(A、B类) 315km/h 445km/h 520km/h或 0.8M数,取较小者
第五章 非精密直角航线程序设计
第二节 直角航线模板 一、基本参数 a)指示空速(IAS) b)程序起始高度(H): c)出航时间(t)。 d)温度:ISA + 15°。 e)全向风风速(W):12h + 87km/h f)平均转弯坡度(α):25°。 g)平均转弯率(R):
第五章 非精密直角航线程序设计
11 TAScos20°+ r×sin20°+ r+ (t + 15 )TAS tg5°+ (t + 26 +110/R)W YE= 11 TAScos20 ° +r×sin20 ° +r +(t + 15 )TAS tg5 ° + (t + 26 +110/R)W
第五章 非精密直角航线程序设计
第五章 非精密直角航线程序设计
第四节 等待程序设计 一、等待航线的形状与有关术语
第四节 等待程序设计
二、进入程序 以导航台为等待点的等待程序的进入航线应按直角航 线程序的进入方法飞行。飞行高度在 4250m ( 14000ft ) 或以下时,出航飞行时间为1分钟;在此高度以上,出 航时间为1.5分钟。 以 VOR 交叉定位或 VOR/DME 定位点作为等待点的等 待程序,应尽可能按径向线进入
490km/h
0.83M数
520km/h或 0.8M数,取较小者
0.83M数
第四节 等待程序设计
四、保护区 保护区:画法与直角航线保护区主区的画法相同 缓冲区:等待保护区的边界外有一个9.3km的缓冲区 五、超障余度 保护区的超障余度 平原地区:300m 山区: 600m 缓冲区的超障余度