(整理)四线制倒车雷达探头电气原理图.
汽车维修技术资料:别克GL8维修电路图(倒车雷达系统连接器端视)

11.5.2.2 倒车雷达系统连接器端视图左后角部倒车雷达探头左后中间倒车雷达探头接头零件信息 l15324398l3路F MQS 密封(黑色)针 导线颜色 电路编号 功能1 YE (黄色) 2375 左后角部倒车雷达探头信号 2BK (黑色)2379E倒车雷达探头低电平基准接头零件信息 l15324398l3路F MQS 密封(黑色)针 导线颜色 电路编号 功能1 OG (橙色) 2376 左后中间倒车雷达探头信号 2BK (黑色)2379D倒车雷达探头低电平基准右后角部倒车雷达探头右后中间倒车雷达探头接头零件信息 l15324398l3路F MQS 密封(黑色)针 导线颜色 电路编号 功能1 PU (紫色) 2378 右后角部倒车雷达探头信号 2BK (黑色)2379B倒车雷达探头低电平基准接头零件信息 l15324398l3路F MQS 密封(黑色)针 导线颜色 电路编号 功能1 D-GN (深绿色) 2377 右后中间倒车雷达探头信号 2BK (黑色)2379C倒车雷达探头低电平基准倒车雷达探头控制模块接头零件信息l12124957l24路F 安普模块 MODULAR(黑色)针 导线颜色 电路编号 功能1 YE (黄色) 2375 左后角部倒车雷达探头信号2 OG (橙色) 2376 左后中间倒车雷达探头信号3 D-GN (深绿色) 2377 右后中间倒车雷达探头信号4 PU (紫色)2378 右后角部倒车雷达探头信号 5 - - 未用 6-7 - - 未用 8 - - 未用 9-1011 PU (紫色) 739A 点火装置1电压12 GY (灰色) 2616 后置停车辅助系统停用开关 13-14 -- 未用15 BK/WH(黑色/白色) 2379B 倒车雷达探头低电平基准 16 - - 未用 17 1819 L-BU (浅蓝色)2380 后置停车辅助系统信号输出 20 - - 未用 21 - - 未用 22OG (橙色)900灯控制23L-GN(浅绿色)24A 倒车灯供电电压24BK(黑色)350H接地。
汽车电器实训指导书-倒车雷达安装方法

实训任务-倒车雷达安装方法
1.实训内容及目的
1)掌握倒车雷达的安装方法。
2.实训器材和用具
1)大众汽车一辆。
2)常用工具一套、万用表一个。
3.实训注意事项
1)实训中的安全注意事项。
2)在安装时,注意工具的选择以防把螺丝拆坏。
4.实训操作步骤
1)倒车雷达安装
(1)在汽车尾部安装四个雷达,首先用度量工具度量探头的安装位置并做好标记号。
雷达位置测量
(2):把配送的专用钻头安装在电钻上,并
对准上一步标记好的位置钻孔。
与探头一致
大小的孔位.
钻孔
(3)把探头与线束连接,并安装在对应的钻孔位上up向上。
探头安装(4)把探头的线束整理并穿到尾箱上
图7-65整理探头的线
(5)接着把红色线接倒车灯线,黑色接搭
铁线。
倒车主机接线
(6)把探头连接线等与主机连接,把主
机固定隐藏在后备箱内侧。
固定主机
(7)显示器与主机连接,显示器连接线沿着车门密封胶条隐藏在内侧,将显示器安装在仪表台上方
隐藏线束安装显示屏
5.实训记录单
倒车雷达安装
序号安装项目安装步骤备注
1 倒车雷达安装。
倒车雷达电路设计

倒车雷达电路设计电路设计2011-03-30 09:50:18 阅读4 评论0 字号:大中小订阅倒车雷达只需要在汽车倒车时工作,为驾驶员提供汽车后方的信息。
由于倒车时汽车的行驶速度较慢,和声速相比可以认为汽车是静止的,因此在系统中可以忽略多普勒效应的影响。
在许多测距方法中,脉冲测距法只需要测量超声波在测量点与目标间的往返时间,实现简单,因此本系统采用了这种方法。
如图1所示,驾驶员将手柄转到倒车档后,倒车雷达自动启动,倒车雷达探头向后发射40kHz的超声波信号,经障碍物反射,由倒车雷达探头收集,进行放大和比较,单片机将此信号送入显示模块,同时触发语音电路,发出同步语音提示,当与障碍物距离小于1m、0.5m、0.25m时,发出不同的报警声,提醒驾驶员停车。
图1 倒车雷达工作原理图图2 倒车雷达探头电路一,相关的硬件设计1 倒车雷达探头设计倒车雷达探头包括超声波产生电路和超声波发射控制电路两个部分,超声波探头(又称“超声波传感器”)选用KT40-1602,可采用软件发生法和硬件发生法产生超声波。
前者利用软件产生40kHz的超声波信号,通过输出引脚输入至驱动器,经驱动器驱动后推动探头产生超声波。
这种方法的特点是充分利用软件,灵活性好,但需要设计一个驱动电流在100mA以上的驱动电路。
第二种方法是利用超声波专用发生电路或通用发生电路产生超声波信号,并直接驱动倒车雷达探头产生超声波。
这种方法的优点是无须驱动电路,但缺乏灵活性。
本设计采用第一种方法产生超声波,电路设计如图2所示。
40kHz的超声波是利用555时基电路振荡产生的。
其振荡频率计算式为f=1.43/((R 9+2·R 10)·C 5)。
将R 10设计为可调电阻的目的是为了调节信号频率,使之与超声波探头的40kHz固有频率一致。
为保证555时基具有足够的驱动能力,宜采用+12V电源。
CNT为超声波发射控制信号,由单片机进行控制。
图3 倒车雷达探头电路倒车雷达探头包括超声波接收探头、信号放大电路及波形变换电路三部分。
2014大众甲壳虫全车电路图12-倒车摄像机
F4
- 倒车灯开关
J503 - 收音机及导航系统带显示单元的控制单元
J519 - 车载电网控制单元
R
- 收音机
R36 R38 R189 T4ak T5f T12c T16b T26d T54 T73b
45
370
A87
B182
B224
B397
B406
* *2 *3
- 电话的发送器和接收器 - 电话话筒 - 倒车摄像头 - 4 芯插头连接 - 5 芯插头连接 - 12 芯插头连接 - 16 芯插头连接 - 26 芯插头连接 - 54 芯插头连接 - 73 芯插头连接 - 中部仪表板后面的接地点
SB13 - 保险丝架 B 上的保险丝 13
SC39 T4f T9a T73a T73b
87
507
690
AB316
* *2 *3
- 保险丝架 C 上的保险丝 39 - 4 芯插头连接 - 9 芯插头连接 - 73 芯插头连接 - 73 芯插头连接 - 接地连接 2,在后部导线束中
w
The Beetle
倒车摄像机(Rear Assist)
自 2013 年 7 月起
电路图
页码,1/3(W)
编号 211 / 1
07.2014
w
The Beetle
页码,2/3(W)
电路图
ws = 白色 sw = 黑色 ro = 红色 rt = 红色 br = 褐色 gn = 绿色 bl = 蓝色 gr = 灰色 li = 淡紫色 vi = 淡紫色 ge = 黄色 or = 橘黄色 rs = 粉红色
- 接地连接 5,在主导线束中
- 连接(RF),在仪表板导线束中
- 连接(RF),在车内空间导线束中
倒车雷达接线安装方法
倒车雷达接线安装方法
安装倒车雷达的接线方法如下:
1. 找到汽车后备箱内的倒车灯电源线。
这个电源线会在倒车时点亮。
2. 使用电线缆和绝缘胶带将倒车雷达的电源线与倒车灯电源线连接起来。
将两条电线的一端剥开绝缘层,然后将它们用绝缘胶带固定在一起,确保电线连接紧固并绝缘。
3. 在车辆的外部,确定倒车雷达传感器的位置。
通常,倒车雷达的传感器安装在车辆的后保险杠上,但具体位置可以根据车型而有所不同。
4. 使用钻孔器在后保险杠上预钻一个孔,以安装倒车雷达传感器。
5. 将倒车雷达传感器插入预先钻好的孔中,并使用螺丝将其固定在后保险杠上。
6. 将倒车雷达的控制器或显示器安装在车辆内部,通常安装在驾驶员座位旁边的仪表板上。
7. 将倒车雷达的控制器或显示器与传感器连接。
使用提供的电线缆将它们连接起来,并确保电线连接牢固。
8. 重新安装车辆的后保险杠,确保它安装稳固并与车辆的其他外观匹配。
9. 打开倒车雷达的电源,然后进行测试。
在倒车时,倒车雷达应该起作用并发出警告信号,帮助您更好地掌握车辆的后方情况。
请注意,以上步骤仅供参考。
由于不同的车型和倒车雷达品牌,安装方法可能会有所不同。
在进行安装之前,请确保阅读并遵守所购买倒车雷达的安装说明书。
如果不确定如何安装倒车雷达,建议咨询专业人士或寻求专业安装服务。
倒车雷达
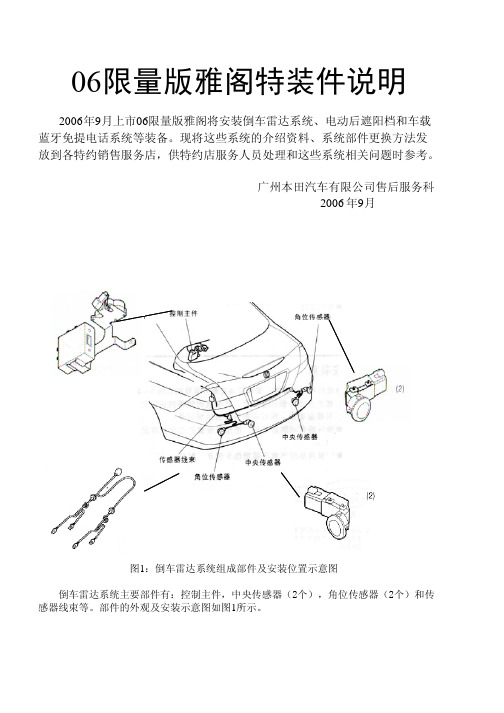
06限量版雅阁特装件说明2006年9月上市06限量版雅阁将安装倒车雷达系统、电动后遮阳档和车载蓝牙免提电话系统等装备。
现将这些系统的介绍资料、系统部件更换方法发放到各特约销售服务店,供特约店服务人员处理和这些系统相关问题时参考。
广州本田汽车有限公司售后服务科2006年9月Ⅰ、 倒车雷达系统一、倒车雷达系统主要组成部件及装配位置说明图1:倒车雷达系统组成部件及安装位置示意图倒车雷达系统主要部件有:控制主件,中央传感器(2个),角位传感器(2个)和传感器线束等。
部件的外观及安装示意图如图1所示。
二、系统说明倒车雷达主要用于汽车在低速倒车时感知汽车后部和侧面的物体。
倒车雷达系统在把换档杆拨到【R】位置时进入工作状态。
车辆倒车时,倒车雷达向外发射声波,传感器通过测定超声波从障碍物反射回的时间,从而计算传感器与障碍物之间的距离。
根据所测得障碍物距离的不同,系统将发出三种不同的警报声音:图2.传感器测距示意图(左图为角位传感器,右图为中央传感器)三、倒车雷达系统部件更换方法(一)、倒车雷达系统传感器更换方法1.拆下两个盖子,从后保险杠卸下两颗螺栓;拆下2个夹扣和6颗自攻螺钉,拆下后保险杠(拆卸方法参见06雅阁维修手册20-23页)。
2.断开线束和传感器的接头,拆下各传感器。
(图3)图42.拆下带垫圈螺栓②,把控制主件从车内面板的孔内拿出(图5)。
图33.按照相反的顺序安装各零件。
(二)、到车雷达系统控制主件更换方法1.从控制主件的蜂鸣器部上断开5芯插头,从控制主件的主件部上断开14芯插头(图4)。
图5。
304-02-倒车雷达维修手册
304-02-1 倒车雷达304-02-1304-02章节倒车雷达维修手册适用车型: 陆风X8目录外形和安装页码倒车雷达………………………………………………………………………………………304-02-2倒车雷达系统连接原理图倒车雷达………………………………………………………………………………………304-02-3维修工具倒车雷达………………………………………………………………………………………304-02-3诊断与维修倒车雷达………………………………………………………………………………………304-02-4陆风·X8304-02-2 倒车雷达 304-02-2陆风·X8外形和安装倒车雷达探头安装在探头支架上,再扣在后保上倒车雷达控制器安装在左后侧维车身钣金上,用两个螺栓固定304-02-3 倒车雷达 304-02-3陆风·X8倒车雷达系统连接原理图系统连接示意图倒车电源:倒车雷达主机端子定义及端子试图:预留喇叭电源线Buzzer+主机电源地线(接音响)GND16倒车电源线(接音响)显示器信号线预留喇叭信号线感应器信号线(三个感应器)显示器电源线L (sensor)R (sensor)+5V +12v +8V定义DISPLAY NC NC NC NC NC Buzzer-C(sensor)NC 111514131278109脚位256431感应器电源备注倒车雷达探头端子视图感应器负极感应器信号感应器正极维修工具 1、万用表2、维修线束的专用工具3、螺丝刀304-02-4 倒车雷达304-02-4诊断与维修检查与确认1. 证实客户提出的故障。
2. 目测机械或电器方面的明显故障。
目视检查表3. 如已发现所观察或所投诉的问题的原因,请在继续下一步工作之前将他它解决。
4. 如果故障不明显,查看并按照故障现象继续查找。
故障诊断表定点测试注意: 使用数字万用表进行测量陆风·X8304-02-5 倒车雷达304-02-5陆风•X8304-02-6 倒车雷达304-02-6A8: 检查倒车雷达倒车开关开路陆风·X8304-02-7 倒车雷达304-02-7陆风•X8。
倒车雷达电路
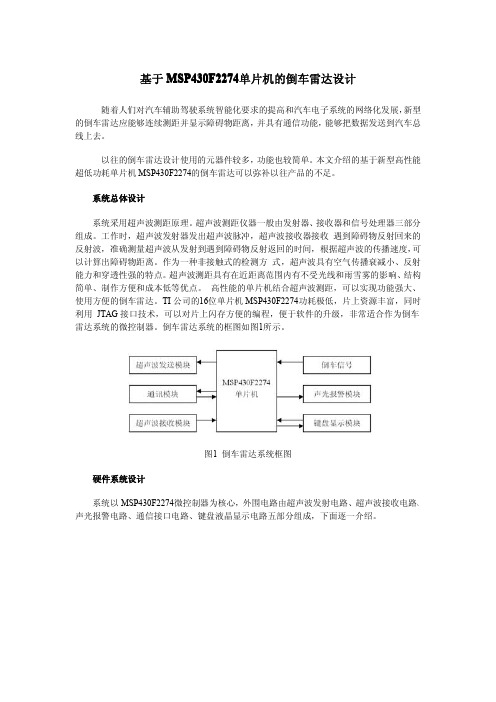
基于MSP430F2274单片机的倒车雷达设计随着人们对汽车辅助驾驶系统智能化要求的提高和汽车电子系统的网络化发展,新型的倒车雷达应能够连续测距并显示障碍物距离,并具有通信功能,能够把数据发送到汽车总线上去。
以往的倒车雷达设计使用的元器件较多,功能也较简单。
本文介绍的基于新型高性能超低功耗单片机MSP430F2274的倒车雷达可以弥补以往产品的不足。
系统总体设计系统采用超声波测距原理。
超声波测距仪器一般由发射器、接收器和信号处理器三部分组成。
工作时,超声波发射器发出超声波脉冲,超声波接收器接收遇到障碍物反射回来的反射波,准确测量超声波从发射到遇到障碍物反射返回的时间,根据超声波的传播速度,可以计算出障碍物距离。
作为一种非接触式的检测方式,超声波具有空气传播衰减小、反射能力和穿透性强的特点。
超声波测距具有在近距离范围内有不受光线和雨雪雾的影响、结构简单、制作方便和成本低等优点。
高性能的单片机结合超声波测距,可以实现功能强大、使用方便的倒车雷达。
TI公司的16位单片机MSP430F2274功耗极低,片上资源丰富,同时利用JTAG接口技术,可以对片上闪存方便的编程,便于软件的升级,非常适合作为倒车雷达系统的微控制器。
倒车雷达系统的框图如图1所示。
图1倒车雷达系统框图硬件系统设计系统以MSP430F2274微控制器为核心,外围电路由超声波发射电路、超声波接收电路、声光报警电路、通信接口电路、键盘液晶显示电路五部分组成,下面逐一介绍。
图2倒车雷达系统主控电路图系统的主控电路图如图2所示。
本系统中选用的MSP430F2274片内有32Kb闪存和1Kb RAM,因此无须外扩存储器。
外接的32.768kHz晶振作为CPU关闭状态Basic-Timer的时钟源,同时也作为系统的车载时钟使用。
超声波发送模块电路如图3所示,由超声波产生和发射两部分组成。
超声波的产生方法有两种:硬件发生法和软件发生法。
常用的硬件发生法常采用如下方案:超声波由CD4011构成的振荡器振荡产生,经升压变换推动超声波换能器而发射出去,振荡器的起振和停振由单片机来控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
表三:周围环境概况和工艺流程与污染流程;2
5.建设项目环境影响评价文件的重新报批和重新审核信号发射
TX
定量安全评价方法有:危险度评价法,道化学火灾、爆炸指数评价法,泄漏、火灾、爆炸、中毒评价模型等。超声波驱动信号,40kHz脉冲13个
3
信号接收
RX
超声波反射波信号
4
电源
POWER
+8V电源
3、信号时序
控制器TX信号脚发射+8v 40kHz的方波脉冲13个用于驱动SENSOR产生超声波。超声波经过障碍物反射后反射波被SENSOR接收。SEMSOR接收反射信号后经过放大滤波及整形变成如上图RX信号的图像。其中余振大约1.2ms,由于障碍物不同和距离的原因是障碍物反射信号强弱不同。反射信号强则反射信号宽度大。最后有控制器(ECU)接收到反射信号,并且计算出障碍物距离。
四线制倒车雷达探头电器原理图
1、系统连接
2、SENSOR PIN脚定义
直接市场评估法又称常规市场法、物理影响的市场评价法。它是根据生产率的变动情况来评估环境质量变动所带来影响的方法。
(3)环境影响评价中应用环境标准的原则。Pin
(五)安全预评价方法名称
详细描述
1
(2)生产、储存危险化学品(包括使用长输管道输送危险化学品)的建设项目;电源地