浅谈倒车雷达工作原理及常见故障分析
倒车雷达分析
倒车雷达分析1 倒车雷达的意义和要求随着汽车的迅速增加,停车难已经是不争的事实,狭小的停车场地常常令有车一族无所适从,稍不慎,则闯祸,烦事又烦人。
虽然每辆车都有后视镜,但不可避免的都存在一个后视盲区。
倒车雷达是汽车泊车或者倒车时的安全辅助装置,能以声音或者更为直观的显示告知驾驶员驾驶车辆周围障碍物的情况,解除了驾驶员泊车、倒车和起动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除了使用死角和视线模糊的缺陷,提高驾驶的安全性。
倒车雷达的发明是迫在眉睫的,是必不可少的设备。
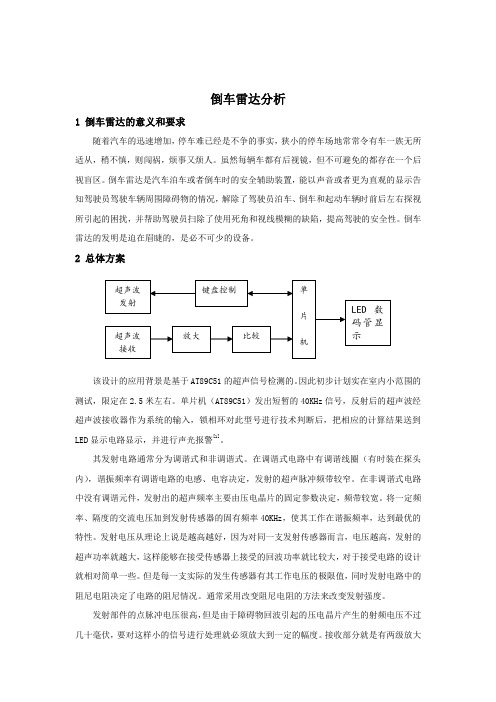
2 总体方案该设计的应用背景是基于AT89C51的超声信号检测的。
因此初步计划实在室内小范围的测试,限定在2.5米左右。
单片机(AT89C51)发出短暂的40KHz信号,反射后的超声波经超声波接收器作为系统的输入,锁相环对此型号进行技术判断后,把相应的计算结果送到LED显示电路显示,并进行声光报警[1]。
其发射电路通常分为调谐式和非调谐式。
在调谐式电路中有调谐线圈(有时装在探头内),谐振频率有调谐电路的电感、电容决定,发射的超声脉冲频带较窄。
在非调谐式电路中没有调谐元件,发射出的超声频率主要由压电晶片的固定参数决定,频带较宽。
将一定频率、隔度的交流电压加到发射传感器的固有频率40KHz,使其工作在谐振频率,达到最优的特性。
发射电压从理论上说是越高越好,因为对同一支发射传感器而言,电压越高,发射的超声功率就越大,这样能够在接受传感器上接受的回波功率就比较大,对于接受电路的设计就相对简单一些。
但是每一支实际的发生传感器有其工作电压的极限值,同时发射电路中的阻尼电阻决定了电路的阻尼情况。
通常采用改变阻尼电阻的方法来改变发射强度。
发射部件的点脉冲电压很高,但是由于障碍物回波引起的压电晶片产生的射频电压不过几十毫伏,要对这样小的信号进行处理就必须放大到一定的幅度。
接收部分就是有两级放大电路,检波电路及锁相环构成,其中包括杂波抑制电路。
最终达到对回波进行放大检测,产生一个单片机(AT89C51)能够识别的中断信号作为回波到达的标志。
[汽车维修与保养:倒车雷达常见故障及维修技巧]倒车雷达常见故障
![[汽车维修与保养:倒车雷达常见故障及维修技巧]倒车雷达常见故障](https://img.taocdn.com/s3/m/b8535c41326c1eb91a37f111f18583d049640f75.png)
[汽车维修与保养:倒车雷达常见故障及维修技巧]倒车雷达常见故障汽车维修与保养:倒车雷达常见故障及维修技巧近些年来,汽车电子产品的更新换代日渐加快,倒车雷达作为汽车上一种新型的电子产品也逐渐走进了人们的日常生活中。
倒车雷达全称叫做“倒车防撞雷达”,也叫“泊车辅助装置”,是汽车泊车或者倒车时的安全辅助装置,能以声音或者更为直观的图像显示来告知驾驶员车後乃至是周围障碍物的情况,解除驾驶员在泊车、倒车和启动车辆时因为前後左右探视所引起的困扰,并帮助驾驶员扫除视野死角和视线模糊的缺陷,提高驾驶的安全性。
倒车雷达从最早的只能够发出“倒车请注意”提示音,到现在能够彩色显示、蜂鸣器提示音的无线倒车雷达,在短短几年的时间内完成了六代的升级更新,方便的性能,跨越较大的价格区间,让越来越多的车主开始在爱车上加装倒车雷达,而这也对售後维修提出了新的要求。
笔者结合工作中遇到的一些故障案例,总结了一些倒车雷达在维修诊断方面的知识,希望能够对读者保养爱车和售後维修人员有所帮助。
一、倒车雷达的结构和工作原理倒车雷达一般由探头(超声波传感器)、控制器和蜂鸣器三部分构成,一些系统还会配有显示器,不过工作原理基本是一样的。
探头:将电信号转化成超声波,并将返回的超声波重新转化成电信号。
控制器:主要是发射正弦波脉冲电信号给探头(超声波传感器),并处理其接收到的信号,换算出距离值後将数据与显示器进行通讯。
蜂鸣器和显示器:接收主机距离数据後,根据距离远近显示距离值并发出不同级别的距离报警音。
在整个倒车雷达系统里面,控制器和显示器一般都是集成的电子产品,故障率较低,维修时也采用整体更换的方式,所以再次不做过多描述,本文主要介绍探头的系统功能。
1 探头的工作波形和在系统内的应用当探头正常工作的时候,探测到的波形如图1所示。
当控制器给探头发送一个电信号後,探头压电片震动产生超声波,而且由于圆形压电片的结构,发射出的超声波会有一定的指向性,波束截面类似椭圆,所以探头探测范围是有一定限制的,一般在水平面上的探测角度为120°,在垂直面上的探测角度为60°,如图2所示。
汽车倒车雷达系统常见故障的诊断与检修
驾驶员一目了然。它会提醒驾驶员:1.5 ~ 0.8m 为 安全区;0.8 ~ 0.3m 为适当区;0.3 ~ 0.1m 为危险区。 在安全区,你可正常倒泊。在适当区,你要减速倒泊; 在危险区,你则要停止倒泊。
3. 按提示方式可分为液晶、语言和声音三种。 4. 从连接方式上,还可分为有线和无线两类。 无线倒车雷达与有线倒车雷达拥有同样功能。目前 与有线倒车雷达相比,无线倒车雷达的主机和显示器 采用无线传播技术连接,避免了对车内饰进行拆卸。 不过由于无线倒车雷达可能会受到手机信号、收音机 等无线电设备干扰,使得无线倒车雷达还没有大面积 普及,有线倒车雷达仍是主流。 三、倒车雷达的报警方式 倒车雷达的报警方式,目前主要有如下几种。 1. 人声报警:指通过语音的方式将障碍物距离 播报出来。特点是清晰准确,不影响视觉观察;缺点 是有时延,会有一定的误差。尤其是在车与障碍物之 间的距离变化较快时,语言来不及转换,无法播报准
二、倒车雷达系统的分类 倒车雷达系统主要分类如下。 1. 按探头分为粘贴式、钻孔式和悬挂式三种。 粘贴式探头后有层胶,可直接粘在后保险杠上;钻孔 式探头,是在保险杠上打一个洞,然后把探头嵌进去; 悬挂式探头主要用于货车。 2. 从 指 示 部 分 分 类, 有 数 字 显 示 指 示、 多 色 LED 灯光显示指示和蜂鸣音指示三种类型。数字式 显示器是一只如 BP 机大小的盒子,安装在驾驶室仪 表板上,距离直接用数字显示,精确到 0.01mm,让
浅谈倒车雷达工作原理

由上述传感器的原始特性, 可以了解到其基本 侦测角度水平垂直的比值为2∶1, 而且约为120°∶60°。
图6 频率为58 kHz传感器的侦测范围示意图
水平探测角度的示意图如图7所示, 垂直探测 角度的示意图如图8所示。 由图9可知: 相同安装高 度, 探测距离较远易照地 (图9a); 相同探测距离, 安装高度较低易照地 (图9b)。
图2 倒车雷达工作原理框图
2 超声波工作原理
超声波工作原理如
图3所示。 利用超声波传
感器产生的超声波对车
后发射, 如在一定范围
内碰到物体, 就有一反
射波返回发射源 (超声 波传感器的表面), 主机
图3 超声波工作原理
利用发射波和反射波之间的延迟时间和声波速度就
能测得距离。
2.1 超声波信号的发射
当汽车处于倒车状态时, 倒车雷达开始启动,
仪表, 提示驾驶员作出不同的动作, 达到安全倒车
目的。
4.1.2 超声波传感器
俗称探头, 负责监控探测范围内的障碍物。 在
倒车时, 传感器发射出超声波信号, 当遇到障碍物
时超声波被反射回来, 传感器又把信号收集, 并以
电信号的形式传给倒车雷达控制器。
4.1.3 组合仪表显示装置
声光报警装置
集 成 在 GC -1 的 组
参考文献: [1] 刘海峰. 汽车倒车雷达系统全接触[J]. 汽车电器, 2007,
(12): 5-8. [2] 肖 炎 根 . 基 于 单 片 机 超 声 波 倒 车 雷 达 系 统 的 设 计 [J].
电子元器件应用, 2008, (7): 59-62. [3] 吴 研. 超 声 波 倒 车 雷 达 系 统 的 设 计 [J]. 工 业 控 制 技
倒车雷达故障排查和工作原理

倒车型达安装示意资料(仪供参考使用)图仁 把儿r 曲吓探头安鑒在车边细 会让宙这探割范盂加大.下匪,「妁前也■对倒车没有魅呜.憶因为掠测范怅大,齊达詞样也会援昔 提示有卿的荐古+讣觀车者注童・■m2. A rD 萄探买安芸跆羯最迪灼让侏*益让探弼范國娈小.iXF 障閏鶴沟.沔达袱益擇洞平到.M 实凋的 徒晝.时削车说有影痢.图芻 探头葺嵐罢求一燃距离地血为®左右,因为擇头发出的述声妾.会以国鼻我发岀,当诞上障烷物后”JEJH 回来.探头按收.传到主麻.主机HM-把戟崙通过贡音,戟字吟方武*来粧11倒车再注庫・如果探斗安莊丈任”会探测劃地面.产生車后遼有曄碍输时.也捲餐的情况.[虻果安樂黑件世法达判證求,安配的.把15头 角度轻熾向上拾一下.便可歆安案二飛◎汨年走位系统 j -- . _______ _ _____________C3h ZZiDSfSEte?她 4Qa^ZTTV^ AVAX7XJ/\7 \7 \J雪超声蛙说遇别障碍翎円.柱蔗近■后,超币台准制嘀 韜头酩乩以下为川种.财阳書达族曉廈前几天因豪淮礦斥呈燮刮餾窑因聖修隔的、车后戏降珈啤不同,得到的故惬会平同.抑车后的毘I#怖是 洁动的人惦「 高墮诵动的汽左”小刊幷筠軒"卅怕弼和的救血就發不同.国为不同笔加,反射叵秦的超百波啦益戒少,所 馭主机计算出来的戴耀也有所不FL :如黑刘着一面:豈体慢捷需嗽.司以得對櫃高的卅确廛一由手拱头坡出旳拔序 浪撼吸香力滋旳海幻劣物体哑枝氐久 4ftTl'Jal«故很难幄测”光Jfl 殊曲-曲于探圭授出更超尙誉皱尤 殊Ift 向其它万闻主劭凰第掉了 M 眾尬堪皱裸期创.S5:當规性探头安装位■斤晴制HL 宦+幔典址出叭昭詢坎黑畀 希側球丽声齐帼市向*咼反*|m J ff ◎祀淮蹴捋讦科迴堰"由丁车百涣有陣碑输”枝乐疏探 刖不出任可东比,怛后面用思空的阿迫, 亘秋宕妾±*^点就较IfcUh -到业远褪屮会融St 採生创. 但由TAAtttilS 礎■牟HMT 硅空赴區11刖幣址只畫囉期创B 耳 世 买博人魚糧均弟仍宓 存在整救老旌矗 Jiff.e 站71时ft 站应该保持适肖诽1S ・不宜未快,収兔接头札出现迥务的毛边;连:件團器融卅分州2、4、5、U 、&个*按标签对应捶揺, 2个传膳器后含G B ・ 4个传感器后含A BCD. 6个传感福前含E F.后含A B S 6个传慰器前含E ■后含A BCD. 8个传膳器前含E G H F ・后含A B C D.2、开孔注.章事顷、…x—A,拡礼时整注童削拈保用水平.以克探头孔出現王料,專毁竦弘累課弟平t1J250 6Jen车£三牛探头位置<jc/7777777y\216GWI77?Zl_J^TTTTTFZ円:•1 p l-TI-住1缸th车后四个探臥憧富二缠炖C.站垮孔后皑靖为理于净孔边的电边.可就使用殆址藉備打磨一下・令探头礼光潘*否刘偿影响探头工作,引起探头耀摧:D.探头孔不宜迥案・否刖会压10提说・引起逞弼・丸采出现过頃葩扳猱.可叹用砂纸対探头孔进行+7・3.探头安装注意事项A-在尿头安装到赛头孔里时,注竄操头上的同上标乔”让问上标示朝上】H- (1车肉拉探头纜时注盍保护好擁头播头.長好事先包奸挥头衙头.拉璇时不要太用力,以免址断探头缆;C、往探头孔因定探头时.不要按,玉採芯部分.血该捲压探头边衆的塑胶边吧探头按圧进探钛孔.桧畫探头是否牢nt究装进塚菲孔°4、其它部件安装注意事项儿农装显示器时・拉线干要太用力丫型殳拉斷显示器贱;B,主机碰安芸在半易理劉的也置*以免岀理插%捧港导竝产品平離丘常工作.尽■谨择穽菜在帝内钱重较少的悅畫*避免出顼干扰导政产品工杵不韋定:乩按"了各连按找固定好产品各祁件后•应该把线柬捆绑回定•井且聰观好1)倒车雷达的工作原理:2)倒车雷达的种类:3)如何选购倒车雷达:4)倒车雷达的准确度:5)倒车雷达的灵敏度6)关于雷达的安装问题 7)雷达安装时要注意什么? 8)问:为什么我的倒车雷达安装后,会产生误报,或是不停地报警,如何处理?资料更新中1)倒车雷达的工作原理:倒车雷达的主要作用是在倒车时,利用超声波原理,由装置于车尾保险杠上的探头发送超声波撞击障碍物后,反射此声波回到探头,探头把数据交给雷达主机,让主机计算车体与障碍物之间的实际距离,通过显示器,声音等方式告诉驾驶者,使停车和倒车更容易、更安全。
倒车雷达喇叭干扰分析与解决方法

报告编号倒车雷达喇叭等干扰分析与解决方法一、问题描述:倒车雷达在按喇叭、开空调及踩油门等情况下出现不必要的误报,影响驾驶员对正常障碍物的判断。
二、问题分析:倒车雷达在平静无干扰情况下正常工作,而在车子按了喇叭、开空调以及踩油门等情况下出现了误报,由此断定倒车雷达系统肯定是受到了车身其他电子器件的干扰,对于干扰我们分析、测试与验证如下:在问题分析之前,首先对倒车雷达工作原理做以简单介绍。
倒车雷达系统工作原理如图1示:图1 雷达系统原理图雷达控制器控制探头发送出58KHZ的方波,发出去的超声波遇到障碍物后反射回来,再次回到探头,在探头内经过简单的滤波与放大后通过选通器件(MUX)进入到放大器一级输入端,在放大器经过一级放大(PGA1)后,通过带通滤波(BPF)再经过二级放大(PGA2),最后经过比较器(Comparator)比较后输入回控制器。
控制器根据发波与回波出现的时间差计算出障碍物的距离。
如果回波信号受到干扰,那么整个系统就会出现工作异常。
我们对雷达正常工作状态和在鸣喇叭、踩油门以及开空调等受到干扰情况下的工作状态做了测试,详细记录如下:1.雷达正常工作时情况时:在不加车身干扰(按喇叭、踩油门及开空调等)时,雷达的几个关键波形如下:报告编号1)正常情况下发波波形、放大器二级放大输出信号、回波波形图2 正常情况下发波波形、二级放大输出信号、回波波形注:信号1(黄色)代表发波信号,信号2(粉色)代表回波信号、信号3(紫色)代放大器二级输出信号。
2)正常情况下发波波形、阈值、回波波形图3正常情况下发波波形、阈值信号、回波波形注:信号1(黄色)代表发波信号,信号2(粉色)代表回波信号、信号3(紫色)代阈值信号。
以上两图中,发波信号为58KHZ 方波,每次发波个数16个,发波信号如图2中的信号1所示,超声波发射后遇到前方障碍物反射回来经过探头电路的简单放大与滤波后,再经过控制器一级放大、带通滤波和二级放大后的波形如图2中的信号3所示,接着进入比较器输入端,比较器阈值电压设定如图3中的信号3所示,当放大后的模拟信号幅值超过阈值线后即会产生回波信号(模拟信号负端电压与阈值比较)。
汽车倒车雷达系统异常的分析及解决
158AUTO TIMEAUTO PARTS | 汽车零部件汽车倒车雷达系统异常的分析及解决欧增开 刘冰莹 卜庆鑫东风柳州汽车有限公司乘用车技术中心 广西柳州市 545000摘 要: 伴随着电磁兼容技术在国内的不断发展,狭小的汽车空间内却集成了大量的电子设备,如导航仪、汽车音响、倒车雷达和组合灯组等电子集成系统,这些电子设备都有可能向周围发射和接受不同波段的电磁干扰信号。
某车型下线车辆批量出现打开位置大灯的情况下,后中两雷达探头工作异常,不能正常侦测报警。
本文介绍了汽车雷达异常故障排查过程,通过零部件替换、机理分析等锁定倒车雷达系统的电磁兼容性能不满足要求导致问题发生。
经实车装车确认,采用隔开倒车雷达线束和后保灯具线束的方式解决此问题。
关键词:倒车雷达 EMC 线束布置随着车载电子设备的日益增加,车辆所处的电磁环境变得越来越复杂,从而可能造成车载电子零部件的工作状态异常甚至损坏。
因此,为了降低或避免车载电子零部件的电磁骚扰,并提高其自身的电磁抗干扰能力,采取相应的EMC 测试手段进行试验评估其电磁性能,对保证整车的电磁兼容至关重要。
但是,随着电子技术的提高,电子系统内部的电子设备变得越来越复杂和密集,工作频率也越来越高,从而可能会导致电子设备内部或电子设备之间出现电磁干扰的隐患。
而当电磁干扰现象发生时,敏感的电子设备会出现故障甚至失效,这将会极大地影响汽车行驶的安全与可靠性。
因此要求汽车各个电子设备和电子控制系统必须相互适应,这就涉及到了汽车电磁兼容性的问题[1]。
电磁兼容性在GB14023中将其定义为设备或者系统在其特定的电磁环境中能够正常工作且不对该环境中的任何事物构成不能承受的电磁骚扰的能力。
汽车电磁兼容性主要是指车辆或其电子电器零部件以及独立的技术单元在车辆的电磁环境中正常工作,且不会对该电磁环境中的任何一个零部件和独立的技术单元造成电磁骚扰的能力。
即车辆在一定时间内,一定的频谱资源条件下,车辆与其电子电器零部件可以共存且不会导致性能降级[2]。
倒车雷达工作原理
倒车雷达工作原理
倒车雷达工作原理是基于超声波技术的。
它通过安装在车辆后方的传感器,发射超声波信号,并接收反射回来的信号来检测车辆周围的障碍物。
具体工作原理如下:当驾驶员将车辆挂入倒档时,倒车雷达系统开始工作。
传感器发射超声波信号,这些信号以一定频率在车辆周围形成一个扇形的探测区域。
当超声波信号碰到障碍物时,一部分信号会被反射回来并被传感器接收到。
接收到的反射信号经过处理后,通过车上的显示屏或蜂鸣器向驾驶员提供相应的警示信息。
通常,显示屏上会显示出障碍物的距离和位置,有时还会配有声音提示。
倒车雷达系统通过分析接收到的反射信号的时间和强度,能够计算出障碍物与车辆的距离和位置。
一般来说,障碍物离车辆越近,反射回来的信号就越强,相应的警示信号也就越强烈。
总的来说,倒车雷达利用超声波技术,通过发射和接收信号来检测车辆周围的障碍物,以帮助驾驶员更好地掌握倒车环境,避免碰撞和擦伤。
浅谈倒车雷达工作原理及常见故障分析
浅谈倒车雷达工作原理及常见故障分析[摘要]本文简要的分析了超声波倒车雷达的原理,并对常见故障现象进行分析。
[关键词]倒车雷达、工作原理,超声波,故障分析引言倒车雷达又称泊车辅助系统,一般由超声波传感器(俗称探头)、控制器和显示器等部分组成,现在市场上的倒车雷达大多采用超声波测距原理,驾驶者在倒车时,启动倒车雷达,在控制器的控制下,由装置于车尾保险杠上的探头发送超声波,遇到障碍物,产生回波信号,传感器接收到回波信号后经控制器进行数据处理,判断出障碍物的位置,由显示器显示距离并发出警示信号,得到及时警示,从而使驾驶者倒车时做到心中有数,使倒车变得更轻松,预防事故的发生,保障行车安全.一、工作原理倒车雷达由超声波传感器(俗称探头),控制器和显示器(或蜂鸣器)等部分组成.倒车雷达一般采用超声波测距原理,在控制器的控制下由传感器发射超声波信号,当遇到障碍时,产生回波信号,传感器接收到回波信号后经控制器进行数据处理,判断出障碍物的位置,由显示器显示距离并发出其他警示信号.从而达到安全泊车的目地.二、超声波工作原理:利用超声传感器产生的超声波对车后发射,如在一定范围内碰到物体,就有一反射波返回发射源(超声传感器的表面),主机利用发射波和反射波之间的延迟时间和声波速度就能测得距离。
[超声波信号发射]当汽车处于倒车状态时,倒车雷达开始启动,控制器控制探头发射超声波信号后,再检测超声波的回波信号.超声波的发射是由控制器发射一串脉冲信号,经放大电路放大后,通过探头发射出去.[超声波的接收]当超声波发射完成后,控制器立即检测是否有经障碍物反射回来的超声波信号,通过主机上的滤波电路,并计算发射的时间,利用S=T*V/2就可以得出障碍物距离。
三、倒车雷达工作原理框图MCU通过预定的程序设计,控制相应电子模拟开关驱动发射电路,使超声波传感器工作。
超声波回波信号通过专有的接收滤波放大电路进行处理后,由MCU的IO口对其进行检测,当全部传感器工作完成后,由系统通过完通过特定的算法得出最近的距离,并驱动显示电路工作,来提醒驾驶者最近的障碍物距离及方位。
倒车雷达工作原理分析及常见故障诊断
倒车雷达工作原理分析及常见故障诊断随着社会经济的发展和交通物流的多样化,汽车已经深入人们的生活。
汽车电气系统的出现,极大地提高了驾驶员的行车舒适性和安全性。
倒车雷达系统的配备,提高了驾驶员在泊车行驶的安全性。
本文就倒车雷达系统的工作原理进行分析,让大家对此系统有更深入的认识。
1.倒车雷达系统分类倒车雷达系统由于车型定位、成本造价、整车网络架构等因素的影响,分为以下几种方式:(1)有单独控制器,无网络通信协议。
(2)有单独控制器,使用CAN网络通信协议。
(3)无单独控制器,使用LIN网络通信协议。
(4)无单独控制器,使用LIN和CAN网络通信协议。
2.倒车雷达系统工作原理介绍(1)有单独控制器,无网络通信协议倒车雷达系统山雷达探头、控制器、蜂鸣报警装置或显示装置组成,各元件之间的连接通过硬线通信。
探头与控制器之间通过硬线连接,每个探头之间有单独的电源搭铁或者共用电源搭铁。
单独探头损坏不影响其他探头的正常工作。
具体原理:控制器接收倒挡开关信一号后工作,驱动雷达探头探测障碍物,计算探头与障碍物的距离,到达报警距离后控制蜂鸣报警器工作。
蜂鸣报警器一般集成在控制器内部,或者单独安装在驾驶室内,通过硬线与倒车雷达控制器连接。
若有显示装置,则通过波段显示障碍物的远近距离。
该车型没有显示装置,只有蜂鸣报警装置提醒驾驶员障碍物的距离信息,蜂鸣器集成在倒车雷达控制器内部。
系统工作原理图1所示。
(2)有单独控制器,使用CAN网络通信协议倒车雷达系统由雷达探头、控制器、雷达开关、CAN网络架构组成。
探头和雷达开关与控制器之问通过硬线连接,探头之间共用电源或搭铁,单独探头损坏有可能影响其他探头的正常工作。
控制器通过CAN网络架构与其他模块通信,此系统中不存在单独的蜂鸣报警器或者倒车障碍物距离信息显示装置。
具体原理:控制器接收倒车保险的供电进行上作,通过硬线驱动探头探测障碍物;或者由单独的雷达开关控制倒车雷达系统的工作,方便在车辆前行的过程中提供泊车辅助信息提示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
浅谈倒车雷达工作原理及常见故障分析
[摘要]本文简要的分析了超声波倒车雷达的原理,并对常见故障现象进行分析。
[关键词]倒车雷达、工作原理,超声波,故障分析
引言
倒车雷达又称泊车辅助系统,一般由超声波传感器(俗称探头)、控制器和显示器等部分组成,现在市场上的倒车雷达大多采用超声波测距原理,驾驶者在倒车时,启动倒车雷达,在控制器的控制下,由装置于车尾保险杠上的探头发送超声波,遇到障碍物,产生回波信号,传感器接收到回波信号后经控制器进行数据处理,判断出障碍物的位置,由显示器显示距离并发出警示信号,得到及时警示,从而使驾驶者倒车时做到心中有数,使倒车变得更轻松,预防事故的发生,保障行车安全.
一、工作原理
倒车雷达由超声波传感器(俗称探头),控制器和显示器(或蜂鸣器)等部分组成.倒车雷达一般采用超声波测距原理,在控制器的控制下由传感器发射超声波信号,当遇到障碍时,产生回波信号,传感器接收到回波信号后经控制器进行数据处理,判断出障碍物的位置,由显示器显示距离并发出其他警示信号.从而达到安全泊车的目地.
二、超声波工作原理:
利用超声传感器产生的超声波对车后发射,如在一定范围内碰到物体,就有一反射波返回发射源(超声传感器的表面),主机利用发射波和反射波之间的延迟时间和声波速度就能测得距离。
[超声波信号发射]
当汽车处于倒车状态时,倒车雷达开始启动,控制器控制探头发射超声波信号后,再检测超声波的回波信号.超声波的发射是由控制器发射一串脉冲信号,经放大电路放大后,通过探头发射出去.
[超声波的接收]
当超声波发射完成后,控制器立即检测是否有经障碍物反射回来的超声波信号,通过主机上的滤波电路,并计算发射的时间,利用S=T*V/2就可以得出障碍物距离。
三、倒车雷达工作原理框图
MCU通过预定的程序设计,控制相应电子模拟开关驱动发射电路,使超声波传感器工作。
超声波回波信号通过专有的接收滤波放大电路进行处理后,由MCU的IO口对其进行检
测,当全部传感器工作完成后,由系统通过完通过特定的算法得出最近的距离,并驱动显示电路工作,来提醒驾驶者最近的障碍物距离及方位。
四、超声波传感器介绍
整个倒车系统的最核心部件,其作用是发出超声波及接收超声波。
影响其性能的主要参数有:外形尺寸与工作频率。
1.倒车雷达超声波传感器频率目前常用的有:40KHZ,48KHZ,58KHZ等等。
1.1 频率为40KHZ传感器侦测范围图
1.2.频率为48KHZ传感器侦测范围图
1.3.频率为58KHZ传感器侦测范围图
选用不同频率的传感器以满足不同车型的实际要求。
2.性能与高度、仰角关系
2.1 倒车雷达的性能与传感器的安装高度、安装位置的保险杆仰角关系最为密切.
2.2由上述传感器的原始特性:可以了解到其基本侦测角度水平垂直的比值为2:1而且
约为120°:60°.
2.3水平探测角度的示意图
照地
在对客户的实际运用上,一般而言不会希望地面上比较小的障碍物被侦测到或是在不平整的碎石头路面有“误动作”的发生.
高度520mm不照地高度450mm照地2.5克服照地的几种方案
2.5.1 提高探头的安装高度
⏹提高探头安装高度同时需考量保险杆造型
⏹建议在55cm~60cm
2.5.2 探头设计为上仰
2.5.3 采用频率更高的传感器
⏹垂直角度小,不易照地
⏹价格提高,不常用
通过以上各种解决措施可知:尽管解决不照地的设计方案有多种,但安装高度和保杆角度一般无法改变,又受成本的制约,通常采用提高探测器仰角的办法来满足其探测性能。
五、以LG-1为例,简要说明其维修原理
5.故障名:倒车雷达在倒车时不工作
5.1.1故障现象:
倒车时倒车雷达显示器无显示,蜂鸣器无提示音发出。
5.1.2故障原因:
①汽车电瓶电压不足;
②连接线束与控制器接触不良;
③连接线束与显示器接触不良;
④连接显示器到控制器的线束损坏;
⑤倒车雷达控制器损坏或倒车雷达显示器损坏
5.1.3故障诊断与排除:
①检查ACC及倒车灯电压是否在9—16V范围内,如小于此电压,请及时调整。
②检查车身线束与控制器连接是否牢靠,如连接正常时,用手触摸探头传感器时,会有轻微的震动感。
如没有,请检查控制器线束的供电端口电压是否正常。
③检查车身线束与显示器连接是否牢靠,如连接正常时,在通电的瞬间显示器上的LED灯会全部点亮大概1秒钟的时间,如没有此现象,请检查显示器线束的供电端口电压是否正常。
④如果显示器通电时能正常工作,且倒车时控制器所接的探头传感器有震动,但显示器无法显示倒车数据,请检查显示器到控制器间的连线是否正确连通,可使用万用表进行断路及短路测试。
⑤如经过上述检查后,仍无法排除故障,即可判断为控制器或显示器损坏。
可分别以好的部件进行替换,从而判断出正确的部件故障。
5.2故障名:倒车雷达误报
5.2.1故障现象:
倒车时达显示器始终显示固定的数字,不会随着障碍物的远近变化而改变。
5.2.2故障原因:
①探头安装有误;
②探头连接线束损坏;
③探头或控制器损坏
5.2.3故障诊断与排除:
①根据显示器的方向指示灯确定出相应的有故障的探头(左边指示灯亮时,代
表左边两个探头探测到物体,右边指示灯亮时,代表右边两个探头探测到物体,而当左,右指示灯同时亮起时,则代表中间两个探头探测到物体),检查探头是否安装歪斜,如存在此现象请及时调整。
(如果显示数据一直为0.6或是0.7,则是探头方向装反,须将上下方向和左右方向进行对调)
②使用万用表检查相应的探头到控制器的连接线束,是否有短路或是断路的现
象
③如经过上述检查后,仍无法排除故障,即可判断为控制器或探头本身损坏。
可以好的探头代替相应的存在问题的探头,如还存在同样问题则可判断为控制器损坏。