相轨迹方程为
《自动控制原理》考点精讲(第8讲 非线性控制系统分析)
自动控制原理(自动控制理论)考点精讲
量外,还含有关于ω的高次谐波分量。使输出波形发生非线
性畸变。 正弦响应的复杂性:①跳跃谐振及多值响应;②倍频振荡与 分频振荡;③组合振荡(混沌);④频率捕捉。 混沌:
自动控制原理(自动控制理论)考点精讲
网学天地( )
e
x
x(t)
x(t)
x(t)
x(t)
ωt ωt
ωt ωt
自动控制原理(自动控制理论)考点精讲
自动控制原理(自动控制理论)考点精讲
网学天地( )
例:欠阻尼二阶系统的相平面描述——相轨迹
相轨迹在某些特定情况 下,也可以通过积分法, 直接由微分方程获得x和x 导数的解析关系式:
x dx = f (x, x) ⇒ g(x)dx = h(x)dx dx
自动控制原理(自动控制理论)考点精讲
α
=
dx dx
=
f (x, x) x
则与该曲线相交的任何相轨迹在交点处的切线斜率均为α,
该曲线称为等倾线。 注1:线性系统的等倾线为直线; 注2:非线性系统的等倾线为曲线或折线。
自动控制原理(自动控制理论)考点精讲
网学天地( )
由等倾线的概念知,当相轨迹经过该等倾线上任一点时,其 切线的斜率都相等,均为α。取α为若干不同的常数,即可 在相平面上绘制出若干条等倾线,在等倾线上各点处作斜率 为α的短直线,并以箭头表示切线方向,则构成相轨迹的切 线方向场。
相平面
u为外作用。是个常量
x
f
x,
x
(1)
式中
x
dx
dt
x
d2x dt 2
则
dx dt
x
用第一个方程除 第二个方程
d x dt
f (x, x)
运动状态方程组
d x f (x, x)
dx
x
相轨迹斜率方程
相轨迹方程可用于描绘运动的相轨迹,也是相平面分析的工具。
线性二阶系统的相轨迹
线性二阶系统的自由运动亦可写成
x a x bx 0
b<0时,根的分布如图,两条等倾线既是相轨迹,又将相平面分成 四个区域。只有初始值落在负斜率的等倾线上,运动将趋于原点。 即使这种情况,如受到微小的扰动,将偏离该轨迹,发散至无穷。
原点称为 鞍点。
线性二阶系统的相轨迹
x a x bx 0
当b=0时,系统的特征根为 s1 0
相轨迹的斜率方程为 d x a dx
s2 a
相轨迹是过初始条件的斜率为-a的直线。
用积分法求得相轨迹
x x(0) ax x(0)
a>0,收敛并最终停止在x轴
a<0,发散至无穷。
奇点与普通点
相轨迹上,每一点切线的斜率为:
e)
1 T
(e
KM )
f2 (e,
e)
1 T
(e
KM )
因此
f1(e,e) f2(e,e)
非线性动力学导论讲义02(二阶系统简介)-岳宝增 (1)

0 ]为单摆倒置点(鞍点),附近相轨线双 2.平衡点[ 曲线;
0]到[ 3.从[
0]或相反的连线为分界线;
在分界线内的轨线是闭合回线 单摆作周期振动,其幅值是x 在相图中所取得的最大值。分 界线以外单摆能量E 超过势能 曲线的极大值,轨道就不再闭 合,单摆作向左或向右方向的 旋转运动(x.符号不变,x持 续增大或减小)。上下部分的波浪线的波动现象是由于 重力的影响,速度越大,波动越小。
x
dx
dx
y
某一具体相轨可以要求其通过特定的点(x,y)得到,将这 一特定的点作为初始状态(x0,y0),其中: (10)
y ( x0 ) y 0
完整的带有方向的相轨构成系统的相图 再来讨论对应常值解的相图上的平衡点
dy f ( x, y ) 0 dt dx y0 dt
的单参数曲线族;称为系统的相图,这些曲线称为相轨线。
此外,(5b)式还表示系统有如图所示的2 π 周期性;还有
.
轨线的方向性(后面讨论)。给定一对值(x,y)或(x,x ) 则对应相图上的某一点P,称为系统的一个状态。某一状态 给出了某一特定摆角为x时其角速度为x =y,这两个变量 正是我们某一特定时刻观察摆的摆动时所感知的对象的量 化表示。对给定的一对值(x,x )亦可以作为微分方程的 初始时刻;因此,任一给定的状态可以确定所有其后续的 状态,而这些状态都位于通过P(x,y)点(初始状态)的相 轨线上。上图中用箭头标定了随着时间的变化,轨线应行 进的方向;该方向可由方程(5a)确定: 当y>0时,则x >0,所以x必然随着t的增加而增大;这表明 在上半平面轨线的方向必须是从左到右;同理,在下半平
推断出微分方程解的重要性质。本章介绍一种应用非 常广泛的几何工具相平面方法,直接根据动力学系统 的微分方程来研究平衡点、周期性、解的渐进性、稳 定性等。经典力学中的单摆问题可以用来说明相平面 法如何揭示微分方程的主要动力学特性。
非线性系统分析方法
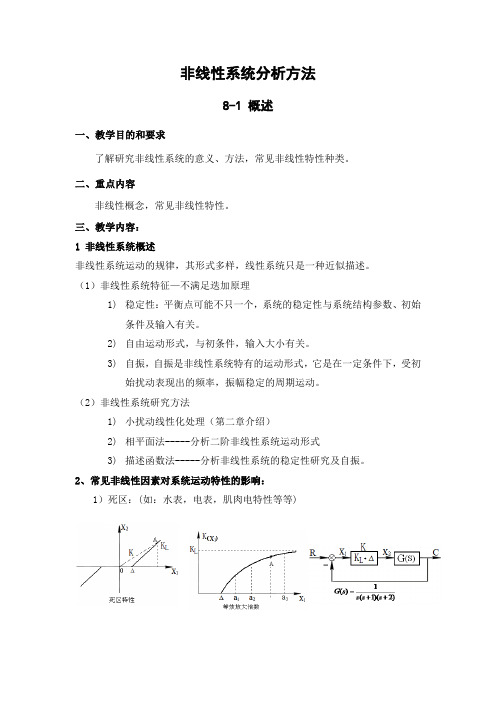
非线性系统分析方法8-1 概述一、教学目的和要求了解研究非线性系统的意义、方法,常见非线性特性种类。
二、重点内容非线性概念,常见非线性特性。
三、教学内容:1 非线性系统概述非线性系统运动的规律,其形式多样,线性系统只是一种近似描述。
(1)非线性系统特征—不满足迭加原理1)稳定性:平衡点可能不只一个,系统的稳定性与系统结构参数、初始条件及输入有关。
2)自由运动形式,与初条件,输入大小有关。
3)自振,自振是非线性系统特有的运动形式,它是在一定条件下,受初始扰动表现出的频率,振幅稳定的周期运动。
(2)非线性系统研究方法1)小扰动线性化处理(第二章介绍)2)相平面法-----分析二阶非线性系统运动形式3)描述函数法-----分析非线性系统的稳定性研究及自振。
2、常见非线性因素对系统运动特性的影响:1)死区:(如:水表,电表,肌肉电特性等等)饱和对系统运动特性的影响:进入饱和后等效K ↓⎪⎩⎪⎨⎧↓↑↓↓,快速性差限制跟踪速度,跟踪误统最多是等幅振荡)(原来不稳,非线性系振荡性统一定稳定)原来系统稳定,此时系(%σ死区对系统运动特性的影响:⎪⎩⎪⎨⎧↓↓↑↓动不大时)]此时可能稳定(初始扰[原来不稳定的系统,,振荡性声,提高抗干扰能力差),能滤去小幅值噪跟踪阶跃信号有稳态误等效%(e K ssσ 可见:非线性系统稳定性与自由响应和初始扰动的大小有关。
2) 饱和(如运算放大器,学习效率等等)3) 间隙:(如齿轮,磁性体的磁带特性等)间隙对系统影响:1) 间隙宽度有死区的特点----使ss e ↓2) 相当于一个延迟τ时间的延迟环节,%σ→↑ 振荡性减小间隙的因素的方法:(1)提高齿轮精度 ; (2)采用双片齿轮; (3)用校正装置补偿。
5) 摩擦(如手指擦纸) 摩擦引起慢爬现象的机理改善慢变化过程平稳性的方法1)2)3)⎧⎪⎨⎪⎩、良好润滑、采用干扰补偿、增加阻尼,减少脉冲,提高平衡性摩擦对系统运动的影响:影响系统慢速运动的平稳性6)继电特性:对系统运动的影响:1)K (2K %3)ss e σ⎧⎧⎪⎨⎩⎪⎪⎧↑⎪⎪⎪⎧↓⎨⎨⎪⎨⎪⎪↓⎪⎩⎩⎪⎪⎪⎪⎩一、二阶系统可以稳定、理想继电特性 等效: 一般地,很多情况下非线性系统会自振带死区))、带死区继电特性 等效: 快态影响(死区+饷)的综合效果振荡性、一般继电特性:除3、2中听情况外,多出一个延迟效果(对稳定性不利)8-2 相平面法一、教学目的和要求:掌握相平面概念及分析方法。
最优控制理论与系统胡寿松版课后习题答案

2-5 求通过(0)1x =,(1)2x =,使下列性能泛函为极值的极值曲线*()x t :2(1)ft t J x dt =+⎰解:由题可知,始端和终端均固定,被积函数21L x =+,0L x ∂=∂,2L x x ∂=∂, 2d L x dt x∂⋅=∂ 代入欧拉方程0L d Lx dt x∂∂-⋅=∂∂,可得20x =,即0x =故1x c = 其通解为:12x c t c =+代入边界条件(0)1x =,(1)2x =,求出11c =,21c = 极值曲线为*()1x t t =+2-6 已知状态的初值和终值为(1)4x =,()4f x t =式中f t 自由且f t >1,试求使下列性能泛函达到极小值的极值轨线*()x t :211[2()()]2ft J x t x t dt =+⎰ 解:由题可知,2122L x x =+,()4f t ψ=,()14x =,()4f x t = 欧拉方程:L 0d L x dt x∂∂-=∂∂ 横截条件:()00t x =x ,()()f f x t t ψ=,()0fTt L L xx ψ∂⎛⎫+-= ⎪∂⎝⎭易得到2dxdt= 故12x t c =+ 其通解为:()212x t t c t c =++根据横截条件可得:()()()122121114424f f f f f x c c x t t c t c x t t c ⎧=++=⎪⎪=++=⎨⎪=+=⎪⎩解以上方程组得:12569f t c c =⎧⎪=-⎨⎪=⎩ 还有一组解⎪⎩⎪⎨⎧===12121c c t f (舍去,不符合题意f t >1)将f t ,1c ,2c 代入J 可得3140)3(4)212(5025.2*=-=+=⎰⎰•t dt x x J . 极值轨线为()*269x t t t =-+2-7 设性能泛函为120(1)J x dt =+⎰求在边界条件(0)0x =,(1)x 自由情况下,使性能泛函取极值的极值轨线*()x t 。
第八章 非线性控制系统分析
整理后得: x
2
x (x x )
2 2 0 2 0
相轨迹
2.等倾线法 --不解微分方程,直接在相平面上绘制相轨迹。 等倾线: 相平面上相轨迹斜率相等的诸点的连线。 等倾线法基本思想: 先确定相轨迹的等倾线,进而绘出相轨迹的切线 方向场,然后从初始条件出发,沿方向场逐步绘制相
四、继电特性
y M 0 x
M y M
x 0 x 0
-M
对系统的影响:
1可能会产生自激振荡,使系统不稳定或稳态误差增大;
2.如选得合适可能提高系统的响应速度。
其他继电特性
y
M -h 0 h -M x M -△ 0
y
-△
△
y M 0 △ -M x
-M
死区 + 继电
x
滞环 + 继电
x ,从x, x 中消
(2)直接积分法
dx dx dx dx x x dt dx dt dx
dx x f ( x, x ) dx
g ( x)dx h( x)dx
x
x0
g ( x)dx h( x)dx
x1,2 0.25 1.39 j
系统在奇点(0,0)处有一对具有负实部的共轭复根, 故奇点(0,0)为稳定的焦点。
f ( x, x ) 奇点(-2,0)处 x
x 2 x 0
2
f ( x, x ) x
c
c
c
c
(6)≤-1 s1s2 --两个正实根
四、奇点和奇线
1.奇点 --同时满足 x 0 和 f ( x, x) 0 的点。
自动控制原理(黄家英)第二版课后答案-10
1 x 1 的t值,因此上式 1 不存在使x x x 1 ,并当: 0 1,x
0 t 定的也可能是不稳定的; e x 1 0 x 0 即:t ln 时,x 。 平衡状态的稳定性不仅与系统的结构和参数有关,而且与 x0 1 7 系统的初始条件有直接的关系。
14
(4) 继电器特性
y (t ) y (t )
x(t)
x(t)
具有滞环的继电器
M x 0: y 0 M M . x 0: y 0 M
.
x h2 h2 x h1 x h1 x h1 h1 x h2 x h2
2.等倾线法
(3)α取不同值时,画 出若干不同的等倾线,在 每条等倾线上画出表示斜 率为α的小线段,构成相 轨迹的切线方向场 (4)从相轨迹的初始状 态点按顺序将各小线段连 接起来,就得到了所求的 相轨迹 。
10.1.2非线性控制系统的特点
• (3)可能存在自持振荡(极限环)现象
– 自持振荡:指没有外界周期变化信号的作用时,系统 内部产生的具有固定振幅和频率的稳定周期运动。 – 线性系统的运动状态只有收敛和发散,只有在临界稳 定的情况下才能产生周期运动。而这一周期运动是物 理上不可能实现的 – 非线性系统,在没有外作用时,可能会发生一定频率 和振幅的稳定的周期运动,即自持振荡,这个周期运 动在物理上是可以实现的。 长时间大幅度的振荡会造成机械磨损,增加控制误差,因此多 数情况下不希望系统有自振发生 自持振荡是某些非线性系统的重要特征,也是研究非线性 8 系统的一个重要内容
相轨迹的基本特征: (3)相轨迹的运动方向
0 — 向右移动 上半平面: x 0 — 向左移动 下半平面: x
第七章非线性控制系统分析习题答案.
∫ ∫ 1
B=
2π
A3 sin 4 ωt
4 A3
dωt =
π
2
1
(1
− cos
2ωt) 2
dωt
1
π0
π 04
∫ [ ] A3
=
π
2 (1 − 2 c os 2ω t + c os 2 2ω t )
A3
dωt =
π
A3
π
− sin 2ωt 2
π0
π2 π
0
A 3 π c o s 4ω t + 1
G1 ( s) +G1 ( s)
4 、 判 断 题 7 -2 图 中 各 系 统 是 否 稳 定 ; −1 N( A) 与 G ( j ω ) 两 曲 线 交 点 是 否 为 自 振 点 。
2
解 :( a ) 不 是 ; ( b) 是 ; (c)是;
( d) a、c 点 是, b 点 不 是;
( e) 是 ;
( 2 ) 由 图 解 7 -5 可 见 , 当 −1 N( A) 和 G ( j ω ) 相 交 时 , 系 统 一 定 会 自 振 。 由 自 振 条 件
A + 6 −K −( A + 6) K
N ( A)G( jω ) =
=
= −1
ω =1 A + 2 2
2( A+2)
( A +6) K = 2 A +4
10
−1 0
10
G( jω ) =
=
−j
j ω( j ω + 1) ω2 + 1
ω( ω2 + 1)
自动控制原理第9章 习题及解析
第9章 习题参考答案9-1 设一阶非线性系统的微分方程为3x x x =-+试确定系统有几个平衡状态,分析各平衡状态的稳定性,并作出系统的相轨迹。
解 3x x x =-+由30x x -+=解得1230, 1, 1e e e x x x ===-。
作出系统的相轨迹图如下:平衡状态(0, 0)稳定,平衡状态(1, 0), (1, 0)-不稳定。
9-2 已知非线性系统的微分方程为(1) 320x x x ++= (2) 0x xx x ++= (3) 0x x x ++= (4) 2(1)0x x x x --+= 试确定系统的奇点及其类型,并概略绘制系统的相轨迹图。
解 (1) 奇点(0, 0)。
特征方程为2320λλ++=两个特征根为1,21, 2λ=--平衡点(0, 0)为稳定节点。
在奇点附近的概略相轨迹图:x(2) 奇点(0, 0)。
在平衡点(0, 0)的邻域内线性化,得到的线性化模型为0x x +=其特征方程为210λ+=两个特征根为1,2j λ=±平衡点(0, 0)为中心点。
在奇点附近的概略相轨迹图:x(3) 奇点(0, 0)。
原方程可改写为0000x x x x x x x x ++=≥⎧⎨+-=<⎩其特征方程、特征根和类型为21,221,2100.50.866 10 1.618, 0.618 j λλλλλλ⎧++==-±⎪⎨+-==-⎪⎩稳定焦点鞍点 在奇点附近的概略相轨迹图:(4) 奇点(0, 0)。
在平衡点(0, 0)的邻域内线性化,得到的线性化模型为x x x-+=其特征方程为210λλ-+=两个特征根为1,20.50.866jλ=±平衡点(0, 0)为不稳定焦点。
在奇点附近的概略相轨迹图:xx9-3 非线性系统的结构图如图9-48所示。
系统开始是静止的,输入信号r(t)=4·1(t),试写出开关线方程,确定奇点的位置和类型,在e-e平面上画出该系统的相平面图,并分析系统的运动特点。
自动控制原理考试试题第七章习题与答案
第七章非线性控制系统分析练习题及答案7-1设一阶非线性系统的微分方程为xx3 x试确定系统有几个平衡状态,分析平衡状态的稳定性,并画出系统的相轨迹。
解令x0得3(21)(1)(1)0xxxxxxx系统平衡状态x e0,1,1其中:x0:稳定的平衡状态;ex1,1:不稳定平衡状态。
e计算列表,画出相轨迹如图解7-1所示。
x-2-11301312x-600.3850-0.38506x112010211图解7-1系统相轨迹可见:当x(0)1时,系统最终收敛到稳定的平衡状态;当x(0)1时,系统发散;x(0)1 时,x(t);x(0)1时,x(t)。
注:系统为一阶,故其相轨迹只有一条,不可能在整个x~x平面上任意分布。
7-2试确定下列方程的奇点及其类型,并用等倾斜线法绘制相平面图。
(1)xxx0(2) x1x2xx122xx12解(1)系统方程为1:xxx0(x0):xxx0(x0)令xx0,得平衡点:x e0。
系统特征方程及特征根:132:ss10,sj(稳定的焦点)1,2222:ss10,s1.618,0.618(鞍点)1,2xf(x,x)xx, d xdxxxxdx dx 1xx,1xxx11I:1(x0)1II:1(x0)计算列表-∞-3-1-1/301/313∞x0:11-1-2/302-∞-4-2-4/3-1x0:11-1-4/3-2-4∞20-2/3-1用等倾斜线法绘制系统相平面图如图解7-2(a)所示。
2图解7-2(a)系统相平面图(2)xxx112①x22xx②12由式①:x2x1x1③式③代入②:(x1x1)2x1(x1x1)即x12x1x10④令x1x10得平衡点:x e0由式④得特征方程及特征根为2.4142ss2101,2(鞍点)0.414画相轨迹,由④式xx 11 d x1dxx12x1x1x 1 x1 2计算列表322.53∞11.52=1/(-2)∞210-1-2∞用等倾斜线法绘制系统相平面图如图解7-2(b)所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
非线性系统在不同初始偏移下的自由运动 3. 线性系统在没有外作用时,周期运动只发生在临界情 况,而这一周期运动是物理上不可能实现。
4. 非线性系统,在没有外作用时,系统中完全有可能发
生一定频率和振幅的稳定的周期运动,如下图所示,这 个周期运动在物理上是可以实现的,通常把它称为自激 振荡,简称自振。
为其等效增益。
非线性环节可看作变增益比例环节
华北科技学院
二、继电特性
1、特性曲线
M
y
来源:继电器是继电
特性的典型元件。
0
-M
x
继电特性 具有图示性质的继电特性称理想继电器。
华北科技学院
2、数学表达式
y
M y M
x0
M
0
-M
x 0
x
造成的影响:
继电特性
(1)改善系统性能,简化系统结构。 (2)可能会产生自激振荡,使系统不稳定。
部件的饱和现象
华北科技学院
2、数学表达式
Ka x2 Kx1 Ka
x1 a | x1 | a x1 a
式中: a 是线性范围, K为线性范围内的传递系数(对 于放大元件,也称增益)。
饱和特性的存在相当于大信号作用时,增益下降。
饱和特性
饱和特性的等效增益
华北科技学院
自动控制原理
Automatic Control Theory
华北科技学院
2018年9月4日星期 二 1
本章主要内容
8-1 非线性控制系统概述
8-2 常见非线性特性及对系统运动的影响
8-3 相平面法 8-4 描述函数法
North China Institute of Scince and Technology
电磁继电器的工作原理和输入-输出特性
二、非线性系统的特点
1. 在线性系统中,系统的稳定性只取决于系统的 结构和参数,对常参量线性系统,只取决于系统
特征方程根的分布,而和初始条件、外加作用没
有关系。 2. 线性系统自由运动的形式与系统的初始偏移无 关。非线性系统则不一样,自由运动的时间响应 曲线可以随着初始偏移不同而有多种不同的形式。
一、相平面的基本概念
1、相平面法 是一种求解二阶常微分方程的图解方法。
设一个二阶系统可以用下列常微分方程描述:
) x f ( x, x
令 x1 x 则
,
x2 x
dx 2 f ( x1 , x 2 ) ,能够体现 x2和 x1的关系。 dx1 x2
来源:放大器的饱和输出特性、磁饱和、元件的行程
限制、功率限制等等。
作用
(1)在大信号作用下,等效传递系数下降跟踪误差,
响应时间,稳态误差。 (2)可能使振荡减弱。 (3)可利用饱和特性来保护系统或元件的安全运行。
华北科技学院
饱和非线性系统
放大器无饱和限制,响应为 曲线1;
放大器有饱和限制时的时间
直流电动机的方框图
华北科技学院
摩擦力矩示意图
小功率随动系统方框图
低速爬行现象
华北科技学院
在非线性系统中,一些更复杂的非线性特性,其中有些 可看成是上述典型特性的不同组合。
y
y M
-hyMຫໍສະໝຸດ -△h-MM
-△
0
x
0 △
-M
x
0 △
-M
x
滞环+继电
华北科技学院
死区+继电
死区+滞环+继电
8-3 相平面法
5. 线性系统中,当输入量是正弦信号时,输出稳态分量 也是同频率的正弦函数,可以引入频率特性的概念并用 它来表示系统固有的动态特性。
6. 非线性系统中,当输入量是正弦信号时,输出稳态分 量包含大量的谐波成分,频率响应复杂,输出波形会很 容易畸变。
三、非线性系统的分析方法
1、相平面法
时域分析法中的一种图解分析法。不适用于高阶系统。 2、描述函数法 结合频域分析法和非线性的谐波线性化的一综合图解分
来源:各类液压阀的正重叠量;系统的库伦摩擦;测量变 送装置的不灵敏区;调节器和执行机构的死区;弹簧预紧 力等。 对系统的影响: (1)使系统产生稳态误差(尤其是测量元件)。 (2)可能会提高系统的抗干扰能力或减少振荡性。
斜坡输入时的系统输出量
包含死区的非线性系统
华北科技学院
四、饱和特性
1、特性曲线 饱和特性是系统中最常见非线性特性。
间隙非线性特性
间隙特性的输入-输出波形
华北科技学院
造成的影响:间隙 输出相位滞后,减小稳定性 裕量,动特性变坏 自持振荡。所以应尽量避免 或减小。
来源:传动机构的间隙: ①齿轮传动中的齿隙; ②液压传动中的油隙; ③磁滞效应。
华北科技学院
六、摩擦
1、特性曲线 摩擦非线性对小功率角度随动系统来说,是一个 很重要的非线性因素。它的影响,从静态方面看,相 当于在执行机构中引入了死区,从而造成了系统的静 差,这一点和死区的影响相类似。
三、死区特性
1、特性曲线 系统中的死区是由测量元 件的死区、放大器的死区以及 执行机构的死区所造成的。
死区特性
华北科技学院
2、数学表达式
0 | x1 | x2 K x1 signx 1 | x1 |
式中
1 x1 0 signx1 1 x1 0
8-1 非线性控制系统概述
什么是非线性系统?
非线性系统一般理解为非线性微分方程所描述的系统。 线性系统的本质特征是叠加原理;非线性系统不满足
叠加原理。 ① 实际的控制系统本质上都是非线性系统;
② 线性系统可看作是非线性系统的特例。
华北科技学院
一、实际系统中的非线性因素
一些常见的非线性特性
华北科技学院
响应曲线如图中的曲线2。
系统的响应
华北科技学院
五、间隙
1、特性曲线 传动机构 (如齿轮传动、杆系传动 ) 的间隙也是控制系 统中的一种常见的非线性因素。
齿轮传动中的间隙
华北科技学院
间隙非线性特性
2、数学表达式
x2 1 , | x1 | b x2 K x1 bsignx K x2 x | x1 | b 2 0, K
析法。分析非线性系统稳定性和自激振荡比较有效。
3、逆系统法 直接运用数学方法研究非线性系统的方法。
华北科技学院
8-2 常见非线性因素对系统 运动特性的影响
一、非线性环节特性
设非线性特性环节表示为
y f ( x)
按线性比例环节描述,定义非线性环节输入和输出之比
y f ( x) k x x