ZN法整定PID参数
z-n 临界比例度法整定 pid 参数

z-n 临界比例度法整定 pid 参数Ziegler-Nichols临界比例度法是一种经典的PID参数整定方法,它是根据系统的临界点表现来确定PID的参数值。
该方法简单易行,不需要精确的数学模型,因此被广泛应用于实际控制系统的参数整定。
首先,我们需要了解一些基本概念。
在PID控制中,P代表比例控制,I代表积分控制,D代表微分控制。
P控制用于根据偏差的大小调节输出,I控制用于消除系统静态误差,D控制则用于抑制系统的振荡和快速响应。
Ziegler-Nichols临界比例度法通过观察系统的输出与输入信号的时域响应曲线来确定PID参数。
具体的步骤如下:1.首先将PID控制器的I和D参数设为0,即仅保留P控制。
2.逐渐增大P参数的值,观察系统的响应情况。
当P参数增加到一定值时,系统的输出会出现持续的振荡,此时称为临界比例度。
3.记录下此时的临界比例度P_c,以及对应的周期T_c(也称为临界周期)。
4.根据临界周期T_c,计算出系统的时间常数T和增益K。
时间常数T和增益K的计算公式为:T = T_c / 2.2K = 0.6 / P_c5.根据计算得到的时间常数T和增益K,可以确定PID控制器的参数:P = 0.5 * KI = 1.2 * K / TD = 0.6 * K * T临界比例度法的优点是简单易行,不需要事先了解系统的数学模型,只需要通过观察系统的响应曲线来确定参数。
然而,该方法的参数整定结果可能不稳定或不准确,因此在实际应用中需要进行进一步的调整和改善。
此外,需要注意的是,临界比例度法适用于一阶或近似一阶(即惯性时间常数较小)的系统。
对于高阶系统或存在明显滞后的系统,临界比例度法可能不适用,需要考虑其他方法进行参数整定。
总之,Ziegler-Nichols临界比例度法是一种简单而实用的PID参数整定方法,通过观察临界比例度来确定参数值。
虽然该方法存在一定的局限性,但在某些情况下仍然可以作为参数整定的起点,后续可以通过实验和调试来进一步改善参数。
ZN系列PID调节仪用户手册

目录一、简介 (2)二、概述 (2)三、主要技术指标 (3)四、仪表面板显示 (3)五、仪表键盘定义 (4)六、B 菜单仪表设置与操作步骤 (5)七、C 菜单仪表设置与操作步骤 (9)八、E 菜单仪表校准设置与操作步骤 (9)九、应用简介 (9)十、仪表的保管、维护与检修 (10)十一、随机附件 (10)注意:使用前请仔细阅读本使用说明书一.简介欢迎您使用江苏中能仪表科技有限公司生产的ZN系列的断续PID调节器、连续PID调节器或伺服PID调节器。
本产品在设计过程中,汇集了国内外众多专家的现场检验,采用仪表专用超大规模集成电路开发设计的新一代多输入方式的智能PID调节器仪表。
仪表机箱内没有可调整部件,所有的参数设置、功能方式选择、模拟量输入输出的准确度标定均通过仪表面板上的按键实现,为了正确、合理的使用仪表,充分发挥仪表的各项功能,请在使用前仔细阅读本说明书的后续部分。
仪表出厂前根据您的订货要求已进行了正确设置,若要更改相应设置参数,必须由熟悉工业控制现场的技术人员在充分了解本仪表性能的基础上才能操作。
在使用中您有新的建议和设想请及时转告本公司,以便为您提供更好的产品。
二.概述PID调节器最多可有8个开头量输出,(如手自动状态输出、输入信号出现故障输出、位控报警输出、控制量、双定时器或可编程智能声光报警。
PID调节器可以将仪表内的PID连续控制量、输入过程量、给定值、阀位反馈量等以模拟量方式输出,同一个量可以给任意1个或2个模拟输出口。
仪表最多可有3个模拟量输出口,用户在订购仪表时请注明模拟输出口的数量及用途,每一个模拟输出口用户均可以定义0~5V、1~5V 0~10mA或4~20mA。
PID调节器(断续、连续或伺服PID调节器)均有以下功能:●各种模拟输入或频率输入,也可以进行开方及小信号切除。
●过程量指示、给定值、控制量指示等三重显示。
●跟踪(阀位反馈)输入信号可任意选择(各种线性输入)●跟踪(阀位反馈)输入的零点与满度可自动或手动校准●3路模拟输出(可分别选过程量、控制量、给定值SP、阀位反馈量)●模拟输出的零点与满度可现场手动校准●频率范围可调的脉冲输出(0.004~10000Hz)●仪表内置16A或40A双向可控硅直接控制交流3KW以下的单相阻性负载或输出3组触发500 A以下双向可控硅的同步信号。
z-n整定法调节pid参数 自动控制原理 -回复

z-n整定法调节pid参数自动控制原理-回复1. 概述自动控制原理自动控制原理是指利用传感器感知系统的状态,并通过执行器调节系统的输出,使系统能够自动实现预期的目标或保持所需的状态。
其中,PID控制器是自动控制系统中最常见的控制器之一,它通过调节比例、积分和微分三个参数来实现对系统的控制。
2. 比例(P)控制器比例控制器是PID控制器中的第一个参数,它根据控制误差的大小,将控制信号与误差的乘积作为输出。
比例控制器的输出正比于误差,但不具备存储上次误差的能力,因此无法完全消除稳态误差。
3. 积分(I)控制器积分控制器是PID控制器中的第二个参数,它在比例控制器的基础上新增了积分项。
积分控制器根据控制误差的累积值来进行调节,能够消除稳态误差。
然而,积分控制器可能引入超调或者导致系统变慢的问题。
4. 微分(D)控制器微分控制器是PID控制器中的第三个参数,它通过测量误差的变化率来进行调节,以改善系统的响应速度。
微分控制器对快速变化的误差进行反应,能够提前控制系统,避免超调现象出现。
然而,过大的微分参数可能导致系统反应不稳定。
5. PID控制器的整定方法为了得到合适的PID参数,需要进行整定过程。
常见的整定方法有经验法、试验法和数学分析法等。
5.1 经验法经验法是通过经验和实践得出的简化方法,适用于部分系统的整定。
比如,对于时间常数较大、响应速度要求不高的系统,可以将PID参数设定为P=0.1、I=0.2和D=0。
5.2 试验法试验法是通过实际试验来确定PID参数。
首先,将系统暂时设为纯比例控制,通过调节P参数,观察系统的响应情况,使其尽可能靠近稳态。
然后,逐步增加I参数,观察系统的稳态偏差是否得到减小。
最后,增加D参数,以改善系统的响应速度。
5.3 数学分析法数学分析法是通过数学模型和控制理论来确定PID参数。
根据系统的数学模型,可以通过控制理论设计出最优的PID参数。
这种方法需要对系统有深入的了解和掌握控制理论知识,对于复杂的系统较为合适。
ZN法整定PID参数

ZN法整定PID参数PID控制器是一种广泛应用于控制系统中的反馈控制器。
它由比例(P)、积分(I)和微分(D)三个部分组成,用于校正系统输出与期望输入之间的误差。
PID参数的调整对于系统的性能和稳定性非常关键。
下面将介绍一种常用的ZN法来整定PID参数。
ZN法是PID参数整定中最经典和最简单的方法之一、ZN法通过对系统进行阶跃响应实验,根据实验数据来计算PID参数的初值。
首先,我们需要将控制系统一定的设定点值。
设定一个合适的目标值,然后将控制器设置为纯比例控制器(I和D参数设置为零)。
这是因为纯比例控制器在响应较小误差时最具特征,易于实验和参数调整。
然后,观察系统的输出响应曲线。
根据曲线特征,确定曲线上的两个重要点:曲线开始出现突变的时间(即曲线的起始点)和曲线达到稳定值的时间(即曲线的终止点)。
然后,计算系统的增益(Ku)和周期(Tu)。
系统的增益(Ku)可以通过观察曲线的倾斜程度来估计。
曲线开始出现突变的时间对应于曲线上的临界点。
根据曲线的斜率,确定这个临界点对应的输出值(Yc)。
接下来,计算系统的周期(Tu)。
周期是曲线的一个完整振荡所需的时间。
通过找到一对相邻的波峰或波谷,计算它们的时间差来获得周期。
有了增益(Ku)和周期(Tu)的数据,我们可以根据ZN法的公式来确定P、I和D的初值。
比例参数(Kp)可以根据公式Kp=0.6*Ku计算得出。
积分时间(Ti)可以通过公式Ti=0.5*Tu计算得出。
微分时间(Td)可以通过公式Td=0.125*Tu计算得出。
ZN法获得的PID参数通常是初值,需要进一步的调整和优化。
这可以通过实验和实际应用中的调整来完成。
通常,I和D参数的调整相对Kp 来说较为困难,需要根据系统的实际需求和性能进行微调。
总结起来,ZN法是一种简单且直观的方法来整定PID参数。
通过对系统进行阶跃响应实验,计算出增益(Ku)和周期(Tu),然后根据公式计算PID参数的初值。
然后根据实际情况进行微调和优化。
(完整word版)Z-N法整定PID参数【带设计题目】

Z-N法整定PID参数在实际应用中,我们尽量避免使用高深复杂的数学公式,希望能使经验法更多的发挥能力,这样既可以节省很多时间,也可以通过经验的传授使更多的工程师或工人可以掌握一种简单有效的方法来进行PID控制器的调节。
传统的PID经验调节大体分为以下几步:1.关闭控制器的I和D元件,加大P元件,使产生振荡。
2.减小P,使系统找到临界振荡点。
3.加大I,使系统达到设定值。
4.重新上电,观察超调、振荡和稳定时间是否符合系统要求。
5.针对超调和振荡的情况适当增加微分项。
以上5个步骤可能是大家在调节PID控制器时的普遍步骤,但是在寻找合时的I和D参数时,并非易事。
如果能够根据经典的Ziegler-Nichols(ZN法)公式来初步确定I和D元件的参数,会对我们的调试起到很大帮助。
John Ziegler和Nathaniel Nichols发明了著名的回路整定技术使得PID算法在所有应用在工业领域内的反馈控制策略中是最常用的。
Ziegler-Nichols整定技术是1942年第一次发表出来,直到现在还被广泛地应用着。
所谓的对PID回路的“整定”就是指调整控制器对实际值与设定值之间的误差产生的反作用的积极程度。
如果正巧控制过程是相对缓慢的话,那么PID算法可以设置成只要有一个随机的干扰改变了过程变量或者一个操作改变了设定值时,就能采取快速和显著的动作。
相反地,如果控制过程对执行器是特别地灵敏而控制器是用来操作过程变量的话,那么PID算法必须在比较长的一段时间内应用更为保守的校正力。
回路整定的本质就是确定对控制器作用产生的过程反作用的积极程度和PID算法对消除误差可以提供多大的帮助。
经过多年的发展,Ziegler-Nichols方法已经发展成为一种在参数设定中,处于经验和计算法之间的中间方法。
这种方法可以为控制器确定非常精确的参数,在此之后也可进行微调。
Ziegler-Nichols方法分为两步:1.构建闭环控制回路,确定稳定极限。
Ziegler-Nichols方法进行PID参数整定
利用Ziegler-Nichols方法进行PID参数设置在实际应用中,我们尽量避免使用高深复杂的数学公式,希望能使经验法更多的发挥能力,这样既可以节省很多时间,也可以通过经验的传授使更多的工程师或工人可以掌握一种简单有效的方法来进行PID控制器的调节。
传统的PID经验调节大体分为以下几步:1. 关闭控制器的I和D元件,加大P元件,使产生振荡。
2. 减小P,使系统找到临界振荡点。
3. 加大I,使系统达到设定值。
4. 重新上电,观察超调、振荡和稳定时间是否符合系统要求。
5. 针对超调和振荡的情况适当增加微分项。
以上5个步骤可能是大家在调节PID控制器时的普遍步骤,但是在寻找合时的I和D参数时,并非易事。
如果能够根据经典的Ziegler-Nichols(ZN法)公式来初步确定I和D元件的参数,会对我们的调试起到很大帮助。
John Ziegler和Nathaniel Nichols发明了著名的回路整定技术使得PID 算法在所有应用在工业领域内的反馈控制策略中是最常用的。
Ziegler-Nichols 整定技术是1942年第一次发表出来,直到现在还被广泛地应用着。
所谓的对PID回路的“整定”就是指调整控制器对实际值与设定值之间的误差产生的反作用的积极程度。
如果正巧控制过程是相对缓慢的话,那么PID 算法可以设置成只要有一个随机的干扰改变了过程变量或者一个操作改变了设定值时,就能采取快速和显著的动作。
相反地,如果控制过程对执行器是特别地灵敏而控制器是用来操作过程变量的话,那么PID算法必须在比较长的一段时间内应用更为保守的校正力。
回路整定的本质就是确定对控制器作用产生的过程反作用的积极程度和PID算法对消除误差可以提供多大的帮助。
经过多年的发展,Ziegler-Nichols方法已经发展成为一种在参数设定中,处于经验和计算法之间的中间方法。
这种方法可以为控制器确定非常精确的参数,在此之后也可进行微调。
Ziegler-Nichols方法分为两步:1. 构建闭环控制回路,确定稳定极限。
如何应用Ziegler_Nichols(Z-N)法整定PID调节器的参数
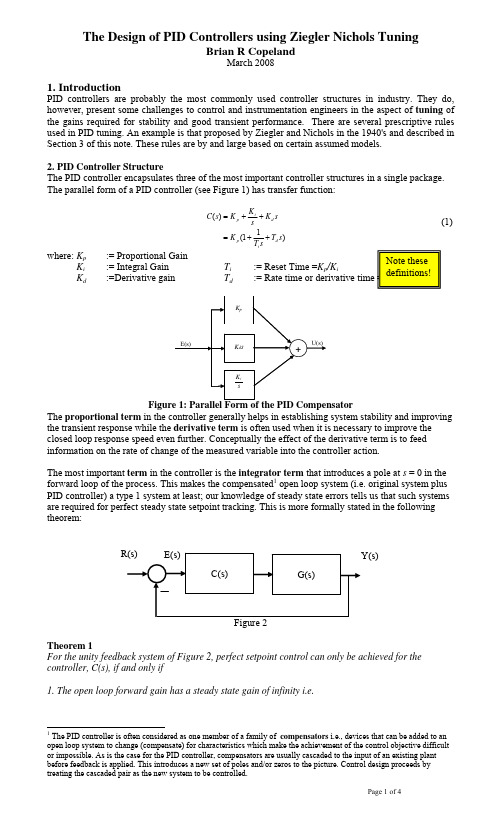
R(s)
E(s) C(s) G(s)
Y(s)
Figure 2 Theorem 1 For the unity feedback system of Figure 2, perfect setpoint control can only be achieved for the controller, C(s), if and only if 1. The open loop forward gain has a steady state gain of infinity i.e.
The Design of PID Controllers using Ziegler Nichols Tuning
Brian R Copeland
March 2008
1. Introduction
PID controllers are probably the most commonly used controller structures in industry. They do, however, present some challenges to control and instrumentation engineers in the aspect of tuning of the gains required for stability and good transient performance. There are several prescriptive rules used in PID tuning. An example is that proposed by Ziegler and Nichols in the 1940's and described in Section 3 of this note. These rules are by and large based on certain assumed models. 2. PID Controller Structure The PID controller encapsulates three of the most important controller structures in a single package. The parallel form of a PID controller (see Figure 1) has transfer function:
ZN法整定PID参数

在实际应用中,我们尽量避免使用高深复杂的数学公式,希望能使经验法更多的发挥能力,这样既可以节省很多时间,也可以通过经验的传授使更多的工程师或工人可以掌握一种简单有效的方法来进行PID控制器的调节。
传统的PID经验调节大体分为以下几步:1.关闭控制器的I和D元件,加大P元件,使产生振荡。
2.减小P,使系统找到临界振荡点。
3.加大I,使系统达到设定值。
4.重新上电,观察超调、振荡和稳定时间是否符合系统要求。
5.针对超调和振荡的情况适当增加微分项。
以上5个步骤可能是大家在调节PI D控制器时的普遍步骤,但是在寻找合时的I和D参数时,并非易事。
如果能够根据经典的Zi egler-Nichol s(ZN法)公式来初步确定I和D元件的参数,会对我们的调试起到很大帮助。
John Ziegle r和Nat hanie l Nichol s发明了著名的回路整定技术使得PID算法在所有应用在工业领域内的反馈控制策略中是最常用的。
Ziegle r-Nichol s整定技术是1942年第一次发表出来,直到现在还被广泛地应用着。
所谓的对PI D回路的“整定”就是指调整控制器对实际值与设定值之间的误差产生的反作用的积极程度。
如果正巧控制过程是相对缓慢的话,那么PID算法可以设置成只要有一个随机的干扰改变了过程变量或者一个操作改变了设定值时,就能采取快速和显著的动作。
相反地,如果控制过程对执行器是特别地灵敏而控制器是用来操作过程变量的话,那么PID算法必须在比较长的一段时间内应用更为保守的校正力。
回路整定的本质就是确定对控制器作用产生的过程反作用的积极程度和PID算法对消除误差可以提供多大的帮助。
经过多年的发展,Ziegle r-Nichol s方法已经发展成为一种在参数设定中,处于经验和计算法之间的中间方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
在实际应用中,我们尽量避免使用高深复杂的数学公式,希望能使经验法更多的发挥能力,这样既可以节省很多时间,也可以通过经验的传授使更多的工程师或工人可以掌握一种简单有效的方法来进行PID控制器的调节。
传统的PID经验调节大体分为以下几步:
1.关闭控制器的I和D元件,加大P元件,使产生振荡。
2.减小P,使系统找到临界振荡点。
3.加大I,使系统达到设定值。
4.重新上电,观察超调、振荡和稳定时间是否符合系统要求。
5.针对超调和振荡的情况适当增加微分项。
以上5个步骤可能是大家在调节PID控制器时的普遍步骤,但是在寻找合时的I和D参数时,并非易事。
如果能够根据经典的Ziegler-Nichols(ZN法)公式来初步确定I和D元件的参数,会对我们的调试起到很大帮助。
John Ziegler和Nathaniel Nichols发明了著名的回路整定技术使得PID算法在所有应用在工业领域内的反馈控制策略中是最常用的。
Ziegler-Nichols整定技术是1942年第一次发表出来,直到现在还被广泛地应用着。
所谓的对PID回路的“整定”就是指调整控制器对实际值与设定值之间的误差产生的反作用的积极程度。
如果正巧控制过程是相对缓慢的话,那么PID算法可以设置成只要有一个随机的干扰改变了过程变量或者一个操作改变了设定值时,就能采取快速和显著的动作。
相反地,如果控制过程对执行器是特别地灵敏而控制器是用来操作过程变量的话,那么PID算法必须在比较长的一段时间内应用更为保守的校正力。
回路整定的本质就是确定对控制器作用产生的过程反作用的积极程度和PID算法对消除误差可以提供多大的帮助。
经过多年的发展,Ziegler-Nichols方法已经发展成为一种在参数设定中,处于经验和计算法之间的中间方法。
这种方法可以为控制器确定非常精确的参数,在此之后也可进行微调。
Ziegler-Nichols方法分为两步:
1.构建闭环控制回路,确定稳定极限。
2.根据公式计算控制器参数。
稳定极限是由P元件决定的。
当出现稳态振荡时就达到了这个极限。
产生了临界系数Kpcrit 和临界振荡周期Tcrit。
确定临界系数Kpcrit和临界振荡周期Tcrit后,根据下表的公式,计算其他参数:
根据上述方法,举例说明:
1.假设Kpcrit=20
2.Tcrit=100ms
确定PID控制器的P、I、D元件的系数以及积分时间内Tn和微分时间Tv。
优化PID控制器的参数:
综上可以看书,在调试PID控制器时,如果应用Ziegler-Nichols方法,可以快速、精确的算出相应的各参数数值,再之后只需进行微调便可得到理想的控制效果。