2016年数学建模国赛A题
2016年国赛题目
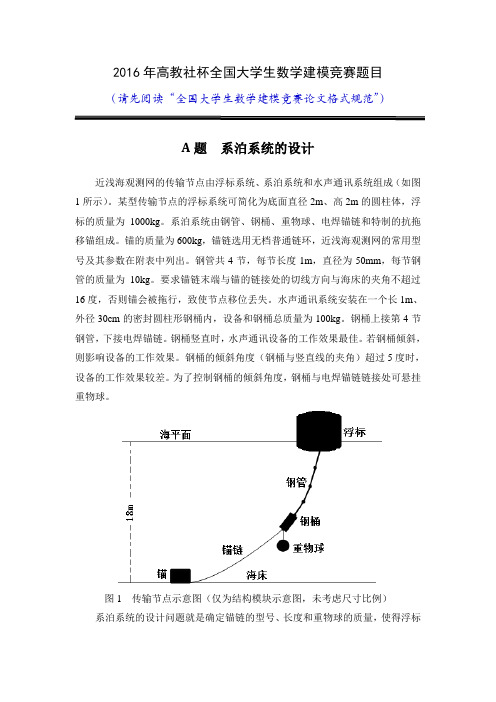
2016年高教社杯全国大学生数学建模竞赛题目(请先阅读“全国大学生数学建模竞赛论文格式规范”)A题系泊系统的设计近浅海观测网的传输节点由浮标系统、系泊系统和水声通讯系统组成(如图1所示)。
某型传输节点的浮标系统可简化为底面直径2m、高2m的圆柱体,浮标的质量为1000kg。
系泊系统由钢管、钢桶、重物球、电焊锚链和特制的抗拖移锚组成。
锚的质量为600kg,锚链选用无档普通链环,近浅海观测网的常用型号及其参数在附表中列出。
钢管共4节,每节长度1m,直径为50mm,每节钢管的质量为10kg。
要求锚链末端与锚的链接处的切线方向与海床的夹角不超过16度,否则锚会被拖行,致使节点移位丢失。
水声通讯系统安装在一个长1m、外径30cm的密封圆柱形钢桶内,设备和钢桶总质量为100kg。
钢桶上接第4节钢管,下接电焊锚链。
钢桶竖直时,水声通讯设备的工作效果最佳。
若钢桶倾斜,则影响设备的工作效果。
钢桶的倾斜角度(钢桶与竖直线的夹角)超过5度时,设备的工作效果较差。
为了控制钢桶的倾斜角度,钢桶与电焊锚链链接处可悬挂重物球。
图1 传输节点示意图(仅为结构模块示意图,未考虑尺寸比例)系泊系统的设计问题就是确定锚链的型号、长度和重物球的质量,使得浮标的吃水深度和游动区域及钢桶的倾斜角度尽可能小。
问题1某型传输节点选用II型电焊锚链22.05m,选用的重物球的质量为1200kg。
现将该型传输节点布放在水深18m、海床平坦、海水密度为1.025×103kg/m3的海域。
若海水静止,分别计算海面风速为12m/s和24m/s时钢桶和各节钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域。
问题2在问题1的假设下,计算海面风速为36m/s时钢桶和各节钢管的倾斜角度、锚链形状和浮标的游动区域。
请调节重物球的质量,使得钢桶的倾斜角度不超过5度,锚链在锚点与海床的夹角不超过16度。
问题3 由于潮汐等因素的影响,布放海域的实测水深介于16m~20m之间。
2016国赛A题国家一等奖论文
x0 , y0
T1 Ti i
D l0
§6 模型的建立与求解
5.1 问题一的分析与求解 5.1.1. 模型的分析 问题一要求我们在给定的一些参数下,假设海水静止,分别计算海面风速为 12m/s 和 24m/s 时钢桶、各节钢管、锚链等的一些指标。首先,我们对整个系泊系统建立直角 坐标系,然后对整个系统做受力分析。设计算法流程,先初始化参数 x0 , y0 ,然后计 算每个物体的 Ti ,i 和 xi , yi ,在通过与海水深度比较,不断修正 y0 和相应的 xn ,使整 体达到最优[3]。 5.1.2. 模型的建立与求解 (1)构建整体坐标系 以锚垂直于海平面向上为 y 轴的正方向,以海面风向为 x 轴,建立二维平面直角坐 标系 xoy 。根据假设条件,浮标系统整体如图 2 所示
图 3 浮标受力分析图
由浮标质量得出,得出其所受重力 G1 m1 g ;浮标所受的浮力(当浮标的吃水深度 D 不断变化时排开水体积用积分表示) : F1 g ( ) 2 h ;由近海风荷载的近似公式可得 2 2 浮标所受的风力: Fw 0.625D(h0 h)vw ;考虑到浮标最终处于静力平衡状态,由静力 学平衡方程有: F1 G1 T1 sin 1
关键词:系泊系统,动力系统,多目标优化,GA 算法
1
§1 问题的重述
1.1 研究问题的背景是什么? 1.1.1 总背景介绍 伴随着世界经济的快速发展, 人们更是逐步加强对海洋领域的探索。为收集海洋环 境的数据资料,人们开始应用浮标系统,同时在开发利用时,都离不开观测设备,如海 底观测站,水下探测器等[1][2]。然而这些设备无一例外的需要系泊系统定位。近浅海观 测网的传输节点由浮标系统、 系泊系统和水声通讯系统组成,简化的某型号输节点的系 泊系统可以如图 1 所示。传统的浮标系统都是由简单的锚—锚链—浮标构成。而这里, 我们研究的浮标系统在锚与浮标之间有一个钢桶(用于安装水声通讯系统) 。钢桶与电 焊锚链链接处悬挂了重物球,是为了控制钢桶的倾斜角度,钢桶的倾斜角度越大,设备 的工作效果较差。 而且钢桶与浮标之间是通过四节相同的钢管连接的。钢管与钢管之间 的连接是可以有偏转角度的。
【免费阅读】2016全国大学生数学建模竞赛A题题目及参考答案
2011高教社杯全国大学生数学建模竞赛题目(请先阅读“全国大学生数学建模竞赛论文格式规范”)A 题 城市表层土壤重金属污染分析随着城市经济的快速发展和城市人口的不断增加,人类活动对城市环境质量的影响日显突出。
对城市土壤地质环境异常的查证,以及如何应用查证获得的海量数据资料开展城市环境质量评价,研究人类活动影响下城市地质环境的演变模式,日益成为人们关注的焦点。
按照功能划分,城区一般可分为生活区、工业区、山区、主干道路区及公园绿地区等,分别记为1类区、2类区、……、5类区,不同的区域环境受人类活动影响的程度不同。
现对某城市城区土壤地质环境进行调查。
为此,将所考察的城区划分为间距1公里左右的网格子区域,按照每平方公里1个采样点对表层土(0~10 厘米深度)进行取样、编号,并用GPS 记录采样点的位置。
应用专门仪器测试分析,获得了每个样本所含的多种化学元素的浓度数据。
另一方面,按照2公里的间距在那些远离人群及工业活动的自然区取样,将其作为该城区表层土壤中元素的背景值。
附件1列出了采样点的位置、海拔高度及其所属功能区等信息,附件2列出了8种主要重金属元素在采样点处的浓度,附件3列出了8种主要重金属元素的背景值。
现要求你们通过数学建模来完成以下任务:(1) 给出8种主要重金属元素在该城区的空间分布,并分析该城区内不同区域重金属的污染程度。
(2) 通过数据分析,说明重金属污染的主要原因。
(3) 分析重金属污染物的传播特征,由此建立模型,确定污染源的位置。
(4) 分析你所建立模型的优缺点,为更好地研究城市地质环境的演变模式,还应收集什么信息?有了这些信息,如何建立模型解决问题?分分工会舒服的规划法规f x c f 是否撒的发生的发生fx c f 是否撒的发生的发生f x c f 是否撒的发生的发生fx c f 是否撒的发生的发生fx c f 是否撒的发生的发生f x c f 是否撒的发生的阿斯顿发斯蒂芬斯蒂芬题 目 A 题 城市表层土壤重金属污染分析摘 要:本文研究的是某城区警车配置及巡逻方案的制定问题,建立了求解警车巡逻方案的模型,并在满足D1的条件下给出了巡逻效果最好的方案。
2016数学建模A题
2016A减肥计划
多数减肥食品达不到减肥的目标,或者即使能减肥一时,也难以维持下去。
许多医生和专家的意见是,只有通过控制饮食和适当的运动,才能在不伤害身体的条件下,达到减轻体重并维持下去的目的.建立一个简单的体重变化规律的模型,并由此通过节食与运动制订合理、有效的减肥计划。
问题:
(1)、如何估计一顿饭摄入的热量?给出学校食堂几个具体的例子,并计算。
(2)、以自己或者身边的人为例,已一周为周期,计算平均每天的摄入热量。
(3)、如果以半年为时间限制,体重减轻10公斤,问题2中的人,应该如何安排自己饮食,应该如何安排自己的运动。
2016年数学建模国赛A题一等奖论文
摘要
近海系泊系统作为气象监控、海洋探测的主要载体工具,对工程的实际应用 有一定的积极作用[1],研究系泊系统在不同环境状况下的内在关系,进而给出适 应不同情况的设计方案,并编写相应的应用软件,有着不能忽视的现实意义[2]。
针对问题一,在整个系泊系统处于最终平衡状态下,从系统的上部钢管开始 受力分析计算,建立不同方向上力的平衡方程和以下部链结点为取距中心的力矩 平衡方程,求得钢管倾斜角度以及下部单元间相互作用拉力,进而计算出钢管的 相对位置改变量。继续分析下部单元的受力情况,建立相同的平衡方程组并求解, 通过反复迭代计算,建立以浮标吃水深度为自变量的迭代代数模型,可求得河道 底部的链环倾斜角度以及整个系泊系统的垂悬高度。进而利用粒子群算法优化上 部浮标的吃水深度,并经过多次迭代优化,最终得到水深 18 米并且风速为 12m/s 和 24m/s 时,浮标吃水深度分别为 0.7348 米和 0.7489 米,同时算出各节钢管的 倾斜角度和各单元的位置坐标(附录及支撑材料),以及浮标游动区域半径 14.2005 米和 17.3203 米。结合理想状态下的锚链悬链线方程拟合位置坐标数据 得出良好的锚链形状曲线方程(式 1.16-1.17),并利用 CAD 软件绘制了所得结 果下的系泊系统 3-维立体分布示意图(图 10)。
在系泊系统中,锚的质量为600kg ,锚链选用无档普通链环。锚与锚链末端 链接,要求链接处的切线方向与海床的夹角不超过 16 度,否则锚会被拖行,致 使节点移位丢失。钢管共 4 节,每节长度 1m ,直径为 50mm ,每节钢管的质量 为10kg。钢桶上接第 4 节钢管,下接电焊锚链。钢桶竖直时,水声通讯设备的 工作效果最佳,钢桶的倾斜角度超过 5 度时,设备的工作效果较差。为了控制钢 球桶的倾斜角度,钢桶与电焊锚链接处可悬挂重物球。
2016年数学建模竞赛A题优秀论文
将(1)式代入得:
dy mg T1 sin 1
dx
T1 cos1
(2)
对于锚链,m=σs ,其中 s 是 AB 锚链的长度,σ是锚链的线密度,即单位长
度锚链的质量[1]。代入(2)式得:
dy sg T1 sin 1
(3)
dx
T1 cos1
根据勾股定理可以得到弧长公式:
ds
1
dy dx
dp dx
T1
cos1
g
1 p2
然后对 x 和 p 分离变量并对两端进行积分得到:
dp
1 p2
T1
g cos 1
dx
即:sinh 1
p
g T1
x
C1
(4)
其中 C1 可以由 x=0,y=0 时的值确定,原点 A 处 p y ' tan 1 ,可得 C1 为:
当海面风速一定且海水静止时,钢桶和各节钢管的倾斜角度、锚链形状、浮 标的吃水深度和游动区域,与锚链线的方程、系泊系统各部分之间的受力平衡和 力矩平衡的约束密切相关。由于传输节点各部分相互影响,根据力学相关知识, 可以按照锚链→钢桶和重物球→钢管→浮标的顺序依次进行受力分析,从而得到 各部分受力平衡时的定量解析式,通过这些表达式可以确定钢桶和各节钢管的倾 斜角度、锚链形状。由于吃水深度与浮标受力直接相关,还可以确定浮标的吃水 深度。对于浮标的游动区域,可以由稳定后系泊系统各个部分在水平方向投影的 总长度来计算游动区域的最大半径。
2016年全国研究生数学建模竞赛A题综述_刘卫东

. ,
FY
-
2
无人 机 的 任务
协同 实 现最 少架 次 的
,
FY
-
2
型无 人 机 完 成 通 信 中 继 任 务 评 阅 中 发 现 不 少 研 究 生 未 能 真 正
,
,
给 出 描 述该 问 题 的 具 体 模型 大 多 数 参 赛 论 文 只 是 通 过 某 种 形式 的 搜 索 算 法 来寻 找 最 优 解
, ,
D
-
1
型 炸弹 还 是
D
-
2
型 炸弹
?
多
,
数 论文 对 这 个 问 题是 考 虑 了 的 但不 少 论 文 的 结果是 不 合理 的 该 问 题 的 具体 解 算 并 不 复 杂
.
可 参 阅 本刊 发 表 的 优 秀 论 文
.
针 对 第 二 阶 段 的 火 力 打击 任 务 规 划 希 望 研 究 生
,
置
、
开机 次 序 和 开 机 时 间 的 不 同 选 择 情 况 对攻 击 方 案 进 行 了
题
.
发现 的 问题进行
了
综 述 最 后 叙述
了
本 赛题 还 需 继 续 思 考 的
;
关 键词
1
:
无 人机 任 务 规 划
;
协
同
规划
;
多 层
规划
;
博弈
问 题背 景
无 人 化 是 武 器 装 备 未 来 发 展 的 重要 趋 势 之
一
.
无人 机
(
U nma nn ed A er
6)
与 火 力 打 击计 划 相 对 应 的 无 人机 航迹 规 划
2016年全国研究生数学建模竞赛A题解答答案

2016年全国研究生数学建模竞赛A题多无人机协同任务规划无人机(Unmanned Aerial Vehicle,UAV)是一种具备自主飞行和独立执行任务能力的新型作战平台,不仅能够执行军事侦察、监视、搜索、目标指向等非攻击性任务,而且还能够执行对地攻击和目标轰炸等作战任务。
随着无人机技术的快速发展,越来越多的无人机将应用在未来战场。
某无人机作战部队现配属有P01~P07等7个无人机基地,各基地均配备一定数量的FY系列无人机(各基地具体坐标、配备的无人机类型及数量见附件1,位置示意图见附件2)。
其中FY-1型无人机主要担任目标侦察和目标指示,FY-2型无人机主要担任通信中继,FY-3型无人机用于对地攻击。
FY-1型无人机的巡航飞行速度为200km/h,最长巡航时间为10h,巡航飞行高度为1500m;FY-2型、FY-3型无人机的巡航飞行速度为300km/h,最长巡航时间为8h,巡航飞行高度为5000m。
受燃料限制,无人机在飞行过程中尽可能减少转弯、爬升、俯冲等机动动作,一般来说,机动时消耗的燃料是巡航的2~4倍。
最小转弯半径70m。
FY-1型无人机可加载S-1、S-2、S-3三种载荷。
其中载荷S-1系成像传感器,采用广域搜索模式对目标进行成像,传感器的成像带宽为2km(附件3对成像传感器工作原理提供了一个非常简洁的说明,对性能参数进行了一些限定,若干简化亦有助于本赛题的讨论);载荷S-2系光学传感器,为达到一定的目标识别精度,对地面目标拍照时要求距目标的距离不超过7.5km,可瞬时完成拍照任务;载荷S-3系目标指示器,为制导炸弹提供目标指示时要求距被攻击目标的距离不超过15km。
由于各种技术条件的限制,该系列无人机每次只能加载S-1、S-2、S-3三种载荷中的一种。
为保证侦察效果,对每一个目标需安排S-1、S-2两种不同载荷各自至少侦察一次,两种不同载荷对同一目标的侦察间隔时间不超过4小时。
为保证执行侦察任务的无人机与地面控制中心的联系,需安排专门的FY-2型无人机担任通信中继任务,通信中继无人机与执行侦察任务的无人机的通信距离限定在50km范围内。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2016年高教社杯全国大学生数学建模竞赛题目
(请先阅读“全国大学生数学建模竞赛论文格式规范”)
A题系泊系统的设计
近浅海观测网的传输节点由浮标系统、系泊系统和水声通讯系统组成(如图1所示)。
某型传输节点的浮标系统可简化为底面直径2m、高2m的圆柱体,浮标的质量为1000kg。
系泊系统由钢管、钢桶、重物球、电焊锚链和特制的抗拖移锚组成。
锚的质量为600kg,锚链选用无档普通链环,近浅海观测网的常用型号及其参数在附表中列出。
钢管共4节,每节长度1m,直径为50mm,每节钢管的质量为10kg。
要求锚链末端与锚的链接处的切线方向与海床的夹角不超过16度,否则锚会被拖行,致使节点移位丢失。
水声通讯系统安装在一个长1m、外径30cm的密封圆柱形钢桶内,设备和钢桶总质量为100kg。
钢桶上接第4节钢管,下接电焊锚链。
钢桶竖直时,水声通讯设备的工作效果最佳。
若钢桶倾斜,则影响设备的工作效果。
钢桶的倾斜角度(钢桶与竖直线的夹角)超过5度时,设备的工作效果较差。
为了控制钢桶的倾斜角度,钢桶与电焊锚链链接处可悬挂重物球。
图1 传输节点示意图(仅为结构模块示意图,未考虑尺寸比例)
系泊系统的设计问题就是确定锚链的型号、长度和重物球的质量,使得浮标的吃水深度和游动区域及钢桶的倾斜角度尽可能小。
问题1某型传输节点选用II型电焊锚链22.05m,选用的重物球的质量为1200kg。
现将该型传输节点布放在水深18m、海床平坦、海水密度为1.025×103kg/m3的海域。
若海水静止,分别计算海面风速为12m/s和24m/s时钢桶和各节钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域。
问题2在问题1的假设下,计算海面风速为36m/s时钢桶和各节钢管的倾斜角度、锚链形状和浮标的游动区域。
请调节重物球的质量,使得钢桶的倾斜角度不超过5度,锚链在锚点与海床的夹角不超过16度。
问题3 由于潮汐等因素的影响,布放海域的实测水深介于16m~20m之间。
布放点的海水速度最大可达到1.5m/s、风速最大可达到36m/s。
请给出考虑风力、水流力和水深情况下的系泊系统设计,分析不同情况下钢桶、钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域。
说明近海风荷载可通过近似公式F=0.625×Sv2(N)计算,其中S为物体在风向法平面的投影面积(m2),v为风速(m/s)。
近海水流力可通过近似公式F=374×Sv2(N)计算,其中S为物体在水流速度法平面的投影面积(m2),v为水流速度(m/s)。
附表锚链型号和参数表
型号长度(mm) 单位长度的质量(kg/m)
I 78 3.2
II 105 7
III 120 12.5
IV 150 19.5
V 180 28.12。