关于车辆安全行车距离的模型
13Pipes模型和Forbes模型
13Pipes模型和Forbes模型从这章开始我们介绍跟驰模型。
我们以两个简单的模型开始,即Pipes模型和Forbes模型,它们都是从驾驶员的日常驾驶经验中总结出来的。
13.1Pipes模型Pipes模型 [1] 是基于加利福尼亚州交通法规中的一条安全驾驶规定:“跟车的一个安全法则是在速度每增加10 mph(十迈或十英里每小时)时就使车间间距增加至少一个车长。
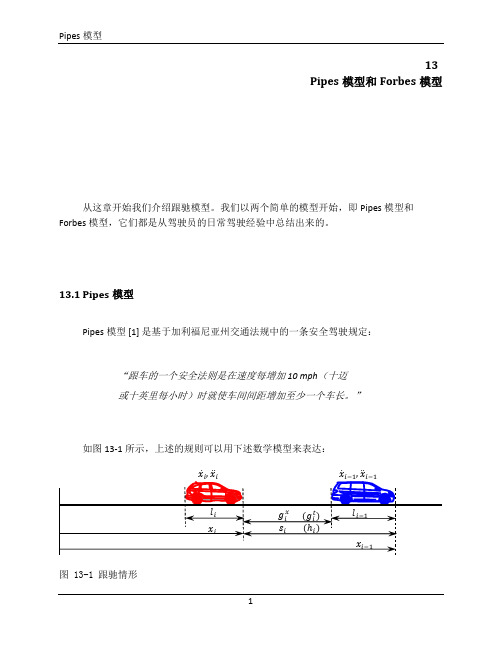
”如图 13-1所示,上述的规则可以用下述数学模型来表达:图 13-1 跟驰情形x ix i−1l i−1s il i gix(git)(ℎi)i i i i i i i x i l t xl t s l t x t x t g 10447.0)())((]))()([()(min 1min 11min ⨯=-=--=---这里)(t xi 是i 号车的速度,单位为m/s ,单位转换为 1 mph ≈0.447 m/s 。
车头间距)(t s i ,车间间距)(t g x i ,前车位置)(1t x i -,后车位置)(t x i ,以及车长l 均以m 为单位。
整合后,Pipes 模型如下:1min )(47.4)(-+=i i ii l t x l t s 假设一辆车的长度为6 m ,上述模型简化为:6)(34.1)(min +=t xt s i i 或者以车头时距)()()(t xt s t h i i i =来表示,上述模型可以改写为: )(634.1)(min t xt h i i +=13.1.1 Pipes 模型的应用Pipes 模型有很多应用,最常见的就是自动驾驶和计算机仿真。
自动驾驶也许最简单的自动驾驶形式就是巡航控制(cruise control 或CC )。
作为一个车载系统,巡航控制通过控制油门来自动控制车辆的速度,使车辆能够以驾驶员设定的速度匀速行驶。
在长途行驶时,巡航控制使得单调无趣驾驶变的轻松简单,因此它是一项很受欢迎的功能。
测定汽车行驶安全距离的主要方法(一)

测定汽车行驶安全距离的主要方法(一)测定汽车行驶安全距离的主要方法方法一:视觉判断法•视觉判断法是人们在驾驶过程中最常用的方法之一。
•驾驶员通过观察前方车辆与自己车辆之间的距离来判断是否保持了足够的安全距离。
•视觉判断法简单易行,但存在主观性强、依赖驾驶员经验等问题。
方法二:反应时间法•反应时间法是通过测量驾驶员在发现紧急情况后的反应时间来推算出安全距离。
•反应时间包括驾驶员观察到紧急情况所需的时间和踩下制动踏板所需的时间。
•通过公式计算得出行驶安全距离,但该方法对驾驶员的反应时间要求较高。
方法三:雷达测距法•雷达测距法利用雷达技术测量汽车与前方车辆之间的距离。
•雷达装置安装在车辆前部,通过测量从雷达到前方车辆的回波时间来计算距离。
•雷达测距法精度高,但设备成本较高,需要专业维护和校准。
方法四:车载摄像头监测法•车载摄像头监测法是通过安装在车辆前部的摄像头监测前方道路状况以及与前方车辆的距离。
•利用图像处理技术,将摄像头捕捉到的图像转化为距离数据。
•车载摄像头监测法实施成本相对较低,但精度受到摄像头画质和处理算法的影响。
方法五:车间距控制系统•车间距控制系统是一种集成多种传感器和技术的系统,能够实时监控前方车辆与自身车辆之间的距离。
•通过激光雷达、摄像头、红外传感器等多种传感器的协同工作,精确测定行驶安全距离。
•车间距控制系统具备高度的智能化和精准度,但设备成本较高。
以上是测定汽车行驶安全距离的主要方法,每种方法都有各自的特点和适用场景。
在实际使用中,可以根据需求和实际情况选择合适的方法来确保行驶的安全。
方法六:车道保持辅助系统•车道保持辅助系统通过摄像头或激光雷达等传感器监测车辆的位置和车道标线,并根据车辆行驶情况自动控制方向盘,以保持车辆在车道内行驶。
•该系统可以通过车辆的位置和车道标线之间的距离来判断是否保持了足够的安全距离。
•车道保持辅助系统能够减少驾驶员的疲劳程度,提高行驶的安全性。
方法七:自适应巡航控制系统•自适应巡航控制系统通过车身前部的雷达或摄像头等传感器监测前方车辆的距离和速度,并自动调整车辆的速度和车距,保持与前车的安全距离。
汽车刹车距离问题数学建模
汽车刹车距离问题数学建模摘要:一、引言二、汽车刹车距离的概念及影响因素1.反应距离2.制动距离三、数学模型的建立1.反应距离模型2.制动距离模型四、数学模型的验证与应用1.模型的验证2.模型的应用五、结论正文:一、引言汽车刹车距离问题是驾驶员在行驶过程中需要重点关注的问题,它直接影响到行车安全。
对汽车刹车距离进行数学建模,可以帮助驾驶员更好地了解刹车距离,提高行车安全意识。
本文将从汽车刹车距离的概念及影响因素入手,建立数学模型,并对模型进行验证与应用。
二、汽车刹车距离的概念及影响因素汽车刹车距离是指从驾驶员察觉到紧急情况到汽车完全停止所需的距离。
它主要包括反应距离和制动距离两部分。
1.反应距离:反应距离是指驾驶员从察觉到紧急情况到开始刹车的距离。
这一距离受驾驶员的反应时间、车速等因素影响。
2.制动距离:制动距离是指汽车在刹车过程中行驶的距离。
它受刹车系统的性能、车速、路面状况等因素影响。
三、数学模型的建立本文采用简化的方法建立汽车刹车距离的数学模型,主要考虑反应距离和制动距离两部分。
1.反应距离模型:假设驾驶员的反应时间为t,车速为v,反应距离为d,则有:d = v * t2.制动距离模型:假设汽车的制动加速度为a,制动距离为d,初速度为v,则有:d = v^2 / (2 * a)四、数学模型的验证与应用1.模型的验证:通过收集实际刹车距离的数据,对模型进行拟合,验证模型的准确性。
2.模型的应用:将建立的数学模型应用于实际驾驶场景,为驾驶员提供参考,帮助他们更好地掌握刹车距离,提高行车安全。
五、结论通过对汽车刹车距离问题的数学建模,我们得到了一个简化的刹车距离模型,该模型可以辅助驾驶员了解刹车距离,提高行车安全意识。
ADAS模型的名词解释
ADAS模型的名词解释ADAS,即"领域自适应系统"(Adaptive Domain System),是一种用于自动驾驶技术领域的模型。
本文将从不同角度解释ADAS模型的含义和用途,探讨其在智能交通领域的重要性。
1. ADAS的概述ADAS系统是一种基于人工智能和机器学习的技术,旨在通过合理地利用传感器、处理器和算法,提高车辆的安全性和驾驶体验。
它能够根据不同的交通环境和驾驶需求,实现自动化的驾驶操作和智能化的决策。
ADAS系统能够自动感知、分析和应对各种驾驶场景和交通状况,例如自动驾驶、自动刹车、车道保持和碰撞预警等功能。
2. ADAS系统的核心技术ADAS系统的核心技术包括传感器技术、数据处理和感知算法、控制与决策算法等。
其中,传感器技术主要包括摄像头、激光雷达、毫米波雷达等多种传感器的应用,用于感知周围环境、检测和跟踪其他交通参与者的动态行为。
数据处理和感知算法主要负责对传感器采集到的数据进行分析和处理,以实现对驾驶场景的感知和理解。
控制与决策算法则负责根据感知结果做出决策,例如制动、转向和加减速等控制操作。
3. ADAS系统的应用场景ADAS系统可应用于各种不同的道路交通场景。
例如,在高速公路上,ADAS 系统可以实现车道保持功能,保持车辆在正确的车道行驶,并通过自动加减速控制与前车保持安全距离。
在城市道路环境中,ADAS系统可以进行自动刹车和碰撞预警,有效减少交通事故的发生。
此外,ADAS系统还可以应用于停车辅助、远程控制和车辆监控等场景,增强驾驶者的驾驶体验和安全性。
4. ADAS系统的优势和挑战ADAS系统的应用在提高驾驶安全性、减少交通事故方面具有重要意义。
通过实时监测和分析驾驶环境,ADAS系统能够预防潜在的危险,并及时采取控制措施,保障驾驶者和行人的生命安全。
此外,ADAS系统还可以提高驾驶者的驾驶体验和行车效率,减少疲劳驾驶和交通堵塞。
然而,ADAS系统的应用也面临着技术难题和安全隐患等挑战,例如对复杂交通环境的理解和处理、对异常情况的应对能力等方面的问题。
高速公路汽车安全距离模型

12 汽 车制动距 离的确定 ,
制动距 离是指车子从 驾驶员 踩制动踏 板到完全 停车所走 过 的距 离 , 即制动距 离 S:S +. 。由图 ( ) s 3 b 可知 ,c过程是匀 速运动 , 过程是减 速度线性 增长运 动 , 过程 是匀减 速运动 。 c f 居 在 过程 中行驶 的距 离为 s l 2
S l O2 2 =V tl () 1
其 中 ,。 是初速度 。 在 过 程 中行驶 的距 离 为 S2因为 过程是 减速度呈 线性增 长 的过 程 , 2, 则有
d v=kd tt () 2
』 s f +05k ) t d = (0 . t d
在条件 v: t =V下 , 式 ( ) o 从 2 可得
给定 的值 也 是 根 据 以前 的 经 验 得 到 的 , 不 精 确 。 并
现在 高 速公 路 、 车 、 距 技 术 等 都 发 展 的很 汽 测 2等
快, 在高 速公路 行车过 程 中 , 了较准 确预 报行 车 间 为 距, 及时 给驾驶 人员发 出警 报 , 防止交 通事 故 的发 生 和提 高行 车效率 , 必 要 建 立 一个 较 准 确 的适 应 高 有 速公 路多种 环境 状况 的汽 车行驶 安全距 离模 型 。虽 然 以前 的研 究建 立 了汽 车安 全 距 离 模 型 , 都 缺 乏 但 算例 验 证 , 也没 有 与规 范 规定 值 进 行 比较 [5, 文 3]本 - 将 推 导 出的安全 距 离模 型用 算 例来 验证 , 与 规 范 并华东 Nhomakorabea交
通
大
学
学
报
2l 年 00
程 , 1 b为简 化后 的汽车制动过程 。在简 化后 的过 程 中 , 图 () 0点表示 驾驶 员接 收 紧急停 车信 号 , 没有作 但 出动作 ; 点表示 驾驶员 移动 右脚 ; 点表 示驾驶员 踩 踏板 ; b c d点表示 制动 器开 始起 作用 ; e点表 示制 动力
车辆高速驾驶临界安全距离
L e —u, A in g o L h n , U W n y M O Ja —u , IZ o g
W U a Z Ch o, HNG n z a L NG i Ya —h o, I Ru
( o e eo E eg P w r n i ei , a j g U ie i f e n ui & A t n ui , aj g2 0 1 , hn ) C l g f n r l y& o e g e r g N ni nvr t o r a t s E n n n sy A o c s o a t s N n n 1 0 6 C i r c i a
1 4
重 庆 理 工 大 学 学 报
随着高速公路里 程 的迅速 增加 , 高速公路 上 的
提 出的临界安全距离模 型对 发生的追尾事故 作 了 3 种假设 , 最终 以引导 车辆突然 发生追尾 事故 时 的安
交通事故数量也在急剧 的升 高。据文献 [ ] 1 中的统
计 ,95年高速公路上发生 45 0起交通事故 , 19 9 而到
能有效地 防止追尾事 故的发 生 , 而临 界安全距 离是
O
车辆防撞 预警系统 的重 要依据 , 以对 临界安 全车 所
距 的研究 具有重 要的实际意义 。文 献 [ ] 3 中提 出的
图 2 汽 车 制动 过程
临界安 全 距 离模 型 , 虑 了引 导 车 驾驶 员 反 应 时 考 间、 制动协 调时 间 和减速 度 增长 时 间 , 在这 些 时 而 间内, 引导 车没发 出制动 信 号 , 因此 跟 随车 没有 意 识到前方 可能有 危 险 。此 模 型对 引导 车 的分析 相 对复杂 , 使计算 出来 的安撞防护栏事故 ; 突然翻车事故; 3 .
高速出11前置指路标志的安全距离设置模型
行为执行时间和空间, 不会因信息缺失、 行为仓促或 突 兀而 造成 分流 区混 乱 , 从 而保 证 分 流 区的 行 车快
速性 、 稳 定性 和安 全性 . 关 于道 路交通 标 志 的设 置 问
情况发生 , 对标志牌的设置高度和偏移宽度都有一 定 的要求 . 一 般要 求 标 志 牌 的设 置 高 度 为 2 . 5 m左
华 南 理 工 大 学 学 报 (自 然 科 学 版)
第4 1 卷 第 2期
2 0 1 3年 2月
J o u r n a l o f S o u t h Ch i n a Un i v e r s i t y o f Te c h no l og y
VO l _ 41 NO. 2 Fe b r u ar y 201 3
的变道 、 减 速驶 离距 离 . 要让所 有 车道 的车辆拥 有 足
题, 许多学者从环境 、 视认性 、 安全及通行能力等方 面 进行 了 相 关 研 究 。 J , 但 考 虑 多 因 素 的综 合 研 究
却 很少 见 . A G S的支 持 方 式 主 要 有 路 边 直 立 式 、 路 上 横跨 式 和 中央架设 式 3类 , 各 自的适 用 条 件 由环 境、 视距 、 经 济 等 条 件 综 合 决 定 J . 我 国高 速 公 路 上的 A G S一 般采 用路 边直 立 式方 式 , 其设 置 距 离 为
安全 距离设 置 模型 .
口前置指路标志( A G S ) 更加重要 , 合理的 A G S 位 置
能 使驾驶 员 获取 足够 的有 用 信 息 , 同时 拥 有 充 足 的
汽车主动避撞系统的安全距离模型和目标检测算法
ui dvl e ytmovh lcli an g n oio vi ne(W/A.h s mdfe e s ga ee pdss feie oio w rn d li ao ac C C ) e yt ensh n o e c l n s i a cl n d s T s e i t ies et— l i (T a e vl tnne i e rd g an g n rk g ae iac n re fi - c lo T C )sh a ao dx tt ai ri d ai fd tne v ot o oi n m s t e u i i w hh g n w n a b n s s
汽车主动避撞系统的安全距离模型和 目标检测算法
裴晓飞,刘昭度 ,马 国成 ,叶 阳
( 北京理工大学 机械与车辆学 院,北京 10 8 ) 0 0 1
摘 要 :为辅助汽车驾驶 员安全 驾驶 , 了 开发 一种汽车主动避撞 系统 。该 系统 以“ 碰撞 时间倒数”T C T1
作为评 价指标 ,采用了 于危险系数 e进行分级报警与主动制动的安全距离模 型,其 关键参 数按照 基
c r t e c l ina od n ets n e ma u l a tma i itr ci s i lme t do r a s T e a ht ol o v ia c t dt n a / uo t e a t n t tmpe ne nd yr d . h wi h i s e a h cn o e o ra c r x e i nss o a te C C y tm i a c r a c t e i dT C ’n e r v s e i e e l a p r e me t h w t t h W/ A s se c o d n ewi d s e T 一 id xi o e h l h n h r mp v c a t es ft, n mb de e d i r r rya dc o e ain c i aey a de o is h r e ’ p i i n o p rt . v t v S ot o Ke r s a t es ft; r i s i a c ; aedsa c d l b t c ee t n c l i r i ; y wo d : c i aey d i n a s t n e s f i n emo e; sa l d tci ; o l o wa n g v v g s t o e o i n s n
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
校第五届大学生数学建模竞赛A题关于车辆安全行车距离的模型摘要本文基于题目所给的数据,综合分析了各种影响安全行车距离的因素,建立起车辆停止的安全距离的数学初等模型,得出了较为合理的计算结果。
对于问题(1),首先,我们以国际经验值公式为基础,建立了模型(一),并从相关资料中得出模型的各个参数的波动范围,解析了各种因素是如何影响安全行车距离的,具有一定的参考价值。
其次,为了能准确地给出具体的数值来确定安全行车距离,我们改进并简化了该模型,以速度为主要参数,建立起模型(二)。
在模型(二)中,我们把安全行车距离近似看为制动距离。
以题目所给的实际数据,进行多项式拟合,得到了二次项的系数k的值为0.0260,并用excel绘图,将模型所得曲线与实际数据的散点图进行比较,得出结果的拟合情况良好。
对于问题(2),在模型(二)的基础上,把安全行车距离分为两部分即制动停车距离和安全停车间距。
安全停车间距定为5英尺。
将问题给出的速度40公里/小时和80公里/小时化为英制单位分别是36.4(英尺/秒)和72.8(英尺/秒),运用以上算法得到安全距离分别为66.7英尺和195.5英尺。
关键词:数学初等模型、excel软件、国际经验公式、安全行车距离模型一、问题的重述随着人们生活水平的不断提高,马路上行驶的车辆也越来越多,交通事故的发生也在不断提高。
针对严重的道路交通情况,为了保障人民的生命安全,在遇到紧急情况时就需要司机能够迅速停下车辆,避免交通事故发生。
安全行车距离是指在车辆行驶过程中两辆车之间必须保持的最小距离,以免在紧急刹车时两辆车相撞。
问题(1)请参考已知的数据(或自己收集资料)建立让车辆停止的安全距离的数学模型。
问题(2)结合1的模型,给出速度是40公里/小时和80公里/小时的安全行车距离。
二、问题的分析所谓的安全行车距离就是指在同一条车道上,同向行驶前后两车间的距离(即后车车头与前车车尾间的距离),保持既不发生追尾事故,又不降低道路的通行能力。
安全行车距离主要取决于制动停车距离。
制动停车距离又包括反应距离和刹车距离。
对于反应距离,也就是当车辆行驶状态发生变化时,驾驶员从看到变化到用脚踩刹车,直到刹车系统产生制动力并开始制动时,汽车在该时段内行驶的距离;而刹车距离即指车辆在刹车系统产生的制动力下开始制动,到运动状态停止时所行驶的距离。
除了制动停车距离外,安全行车距离还应加上安全停车间距,即两车停止运动时的距离。
理想状态下该距离为0,出于安全考虑,本文取值为5英尺。
影响汽车安全行车距离的主要因素有车辆的行驶速度、驾驶员的反应能力、路面的状况、天气的变化、载重量以及车辆的制动系统的结构等。
而车辆的行驶速度是其中最为关键的因素。
对于问题(1),要求参考已知的数据(或自己收集资料)建立让车辆停止的安全距离的数学模型,即所建立的安全行车距离模型能保持既不发生追尾事故,又不降低道路的通行能力。
首先,因为速度是影响汽车安全行车距离中最为关键的因素,所以我们根据一般的经验值公式,建立起模型(一),以描述速度与汽车安全行车距离之间的大概关系,并确定了相关参数的波动范围。
其次,由于理论值与实际参数的不确定性,我们改进了该模型,以速度为主要参数,建立起模型(二),并以问题所给的相关数据进行拟合,得出新的拟合系数k的具体值。
通过excel绘图,将模型所得曲线与实际数据的散点图进行比较,分析得出拟合情况良好。
对于问题(2),我们结合问题(1)的模型(二),将相关的数据化为相同的单位,代入其中,求解出相应结果。
三、模型的假设与符号的说明3.1 模型的假设(1)假设所采用的资料数据都是真实可靠的;(2)假设汽车在刹车过程中未出现故障;(3)假设汽车刹车过程中未遇到因事故引起的公路扭曲等路况;3.2 符号说明d表示安全停车间距;表示反应距离;d1d表示刹车距离;2表示实际行车速率,(i=0,1,2,…13);vi表示不同路面的附着系数;表示驾驶员实际反应时间;t1d表示安全行车距离;k表示二次项的系数;t表示驾驶员反应时间;w表示力f所做的功;m表示物体的质量;v表示物体的速度;f表示物体所受的力;E表示动能的变化量;a表示汽车加速度;四、模型的建立与求解4.1 对问题(1)的模型的建立与求解4.1.1模型(一)的建立与求解车辆的行驶速度是其中最为关键的因素。
《中华人民共和国道路交通安全法实施条例》第八十条规定,机动车在高速公路上行驶,车速超过 100 km / h 时,应当与同车道车保持 100 m 以上的距离;车速低于100 km /h时, 同车前道前车距离可适当缩短,但最小距离不得少于 50 m。
如遇雨雾或路面湿滑 ,应延长行车间距。
以行驶速度这个关键因素,来判断汽车的安全行车距离一般有以下的三种方法 :(1)由于前后车的行驶速度一般都差不多,而且制动过程也差不多,因此可用与前车保持 2 s的时间的方法。
这种方法比较粗糙。
(2)前后汽车间隔的米数和行驶车速的千米数相同。
比如:当汽车车速为 50 km /h 时,安全行车距离为50 m。
(3)车速除以10再平方。
比如当汽车车速为80 km / h 时,安全行车距离为 64 m。
但上三种方法都只能是粗略地估算,并无法准确地计算汽车的安全行车距离。
综合分析影响安全行车距离的各种因素,并按照决定安全距离的反应距离和制动停车距离两个部分,确定如下算法:①反应距离 d1tv d i =1于是在相同的反应时间内,车速越快,反应距离越长。
②制动停车d 2距离根据有关资料分析, 制动距离的长短与汽车的行驶速度、汽车在不同路同行驶时的地面附着系数等因素有关,其数值一般选用经验公式:Φ=25422ivd③安全行车距离dd=d 0+ d 1+ d 2=d+v i t+Φ2542i v④相关参数的确定Φ一般附着系数在干燥水泥路面为 0. 7~1. 0;下雨开始时为 0. 3~0. 4;潮湿水泥路面为 0. 4 ~0. 6。
轮胎与道路的附着系数 φ不同路面的附着系数如表 1所示。
表 4-1 不同路面的附着系数反应时间t,据有关专家测定,在大多情况下数驾驶员的反应时间在 0. 30~1.00s 之间,再加上刹车系统发生作用的时间等因素,总的反应时间在 1. 30~1.98s 之间,即取值为 1.30 ~1.98s 。
它取决于驾驶员反应的灵敏度,操作技术的熟练程度,还与驾驶员的年龄、情绪、身体状况、车速及目标的状态等因素有关,其数据的选择因人而定,很难准确确定。
安全停车间距d 0,两车制动停止时应保持一定的间距d 0以保证安全。
d 0选择是否合理,对安全行车距离有一定的影响。
理想状态下该距离为0,但国内外的资料一般为2~5米。
4.1.2 模型(二)的建立与求解通过以上分析,我们可以认为司机在看到前方有异常,刹车系统产生制动力并开始制动时,汽车所行驶的距离为反应距离:iv t d 11=)1(由能量关系;从踩制动踏板到车停止,汽车车速从v i 变成0的过程中 在F 作用下车行驶距离d 2所做的功为:=W 2Fd 动能的变化量为:=E 2/2mv 汽车车速从v i 变成0过程中,有2Fd =2/2mv ,,按照牛顿第二定律可知F m ∝,刹车时的减速度a 为常数,于是2d =2i kv )2(其中k 是比例系数,实际上1/2k a = 刹车距离为21i i kv v t d += )3(为了将这个模型用于实际,需要知道其中的参数1t 和k .通常有经验估计和数据拟合两种方法,这里我们采用反应时间1t 的平均值(按数据平均值计),其值为0.75秒。
这里给出部分数据。
表4-2 反应时间鉴于刹车距离有一定的范围,我们取其中间值,并重新整理。
利用重新整理后的数据和“t 1=0.75秒,可以得到模型二中k =0.0260;0260.0)75.0(712712=-=∑∑==i ii i i ivv v dk (3)则制动距离与速度的关系为:20260.075.0i i v v d += (4)4.2问题(2)的求解问题(1)的模型(二)求解行车速度与行车安全距离的算法进行优化从来准确估算出问题(2)的结果。
生活中行车安全距离除了制动停车距离外,还应加上安全停车间距,即两车停止运动时的距离。
于是我们引进了安全停车间距d 0。
两车制动停止时应保持一定的间距 d 0 。
d 0选择得是否合理,对系统具有一定的影响。
理想情况最小可以为 0,为了保障安全根据有关国内资料d 0一般为 2 ~5 m ,处于安全考虑此模型规定d 0=5。
于是安全距离为:200260.075.0i i v v d d ++=由问题给出的速度化为英制单位分别是36.4(英尺/秒)和72.8(英尺/秒),运用以上算法得到安全距离分别为66.7英尺和195.5英尺。
五、 模型的结果分析与评价5.1 模型(一)的结果分析与评价由模型(一)可以看出,安全行车距离d 分为三部分,即反应距离、制动停车距离和安全停车间距,但该模型有较多的参数,且在一定的范围内波动,Φ在干燥水泥路面为 0. 7~1. 0;下雨开始时为 0. 3~0. 4;潮湿水泥路面为 0. 4 ~0. 6;反应时间t,在 0. 30~1.00s 之间;安全停车间距d 为2~5米。
但对安全行车距离的研究有一定的指导作用。
在实际驾驶中,按此模型难以准确地测量到与前车的安全行车距离,因此我们改进并简化了该模型,以速度为主要参数,建立起模型(二)。
5.2 模型(二)的结果分析与评价根据模型(二),统计行车安全距离与速度的变化情况如图1所示。
在图1中横坐标表示行车速度,纵坐标表示行车安全距离。
在图中可以看出行车速度是行车安全距离的决定性因素。
表5-1 模型(二)的结果数据速率(英里/小时)观察到的总停止距离(英尺)模型预测值(英尺)29.32 42 44.2936.65 56 62.2943.98 73.5 83.27图1 速率与实际安全距离曲线图2 速率与预测安全行车距离曲线在图2中横坐标表示行车速率,纵坐标表示模型预测行车安全距离;图3 实际值与预测值拟合根据问题给出的相关数据按照模型(二)的公式算出模型预测的安全行车距离,得到表5-1的数据(完整的在附件),运用excel软件得出结果,并把实际值与预测估计值进行图像拟合得到图3,通过图1、图2、图3的对比可以看出,模型的预测结果曲线与实际曲线基本一致,即拟合情况良好。
参考文献[1] 姜启源.谢金星.叶俊. 数学模型.高等教育出版社 2003[2] 韩中庚.马晓军.胡宗云.数学建模竞赛—获奖论文精选与点评(第二卷).科学出版社2013[3] 杨翠萍.官慧峰.高速公路汽车防撞系统的安全行车距离研究,http//.2009[4] 武元杰.孟华.汽车安全车距模型影响因素分析.交通与运输学报.2010(z2).[5] 徐杰.杜文.孙宏. 跟随车安全距离分析.交通运输工程学报2002,2(1).附录:附表4-2 反应时间表5-1 模型(二)的结果数据附表4-3 实际数据。