第三章_单自由度机械系统动力学
单自由度机械动力学分析方法——动态静力法

2
《
关键词: 单自由度; 动力学; 动态静力法; 连杆机构
2
【 bt c】 i ldge o r dmm c i r ia as sd n e po ui . i t s t a s A s at S g e ef e o ah e l y ue a r c gKn o t ial i r n e r f e n ys w i r l d n e - ac n y s《
: 罗阿妮 1 邓 宗全 刘荣强 , 2
・
’・ 卜
(哈尔滨工业大学 机 电工程学 院 , 尔滨 100 ) 哈尔滨工程大 学 机电工程学 院 , 哈 50 1( 哈尔滨 100 ) 50 1
Kie o s a i n lss o n e r e o r e o ma hn r y a c n t — t t a ay i fo e d g e f e d m c ie y d n mis c f
2 《
础、 分析方法, 以及运用该方法解决典型连杆机构动力学问题。
1 动态静力法的理论基础
11 论 基础 .理
间的动力学关系 , 则必须借助典力学即牛顿力学的基础之上。 通过对 运动几何关系可以建立起机构内部各个构件之间的运动位移关系, 加 于机械系统中的单独构件进行受力分析 , 运用构件加速度与合外 对该位移关系式进行求导即可得到机构内部构件之间运动速度 、
2
【 要】 由 摘 单自 度机械在生产实 经常 践中 遇到, 其动力学 对于 分析方法中的 静力法 动态 进行了系 2
2 统的介绍。 给出了 使用该方法进行动力学分析的详细步骤。 通过用该方法来解决典型的反正弦连杆机械 i 5 系统动力学问题, 进一步阐述了该方法在进行机械动力学分析过程中的运用。 5
自由度机械系统动力学分析
06
结论与展望
研究成果总结
01
02
03
04
自由度机械系统动力学分析在 理论和实践方面取得了重要进 展,为复杂机械系统的动态性 能分析和优化设计提供了有力 支持。
自由度机械系统动力学分析在 理论和实践方面取得了重要进 展,为复杂机械系统的动态性 能分析和优化设计提供了有力 支持。
自由度机械系统动力学分析在 理论和实践方面取得了重要进 展,为复杂机械系统的动态性 能分析和优化设计提供了有力 支持。
自由度机械系统动力学分析
目
CONTENCT
录
• 引言 • 自由度机械系统基础 • 自由度机械系统动力学分析方法 • 自由度机械系统动态特性分析 • 自由度机械系统优化设计 • 结论与展望
01
引言
背景介绍
机械系统在工业、航空航天、交通运输等领域广泛应用,其动力 学性能对系统的稳定性和性能至关重要。
结合人工智能、大数据等先进技术,开展自由度 机械系统动力学分析与优化设计,实现智能化、 自动化的动态性能预测和优化设计。
拓展自由度机械系统动力学分析的应用领域,特 别是在智能制造、新能源、生物医学工程等新兴 领域,发挥其在技术创新和产业升级中的作用。
THANK YOU
感谢聆听
稳定性分析
线性稳定性分析
通过判断系统的线性化方程的解的稳定性,确定系统的稳定性。常用的方法有 特征值法和Lyapunov直接法。
非线性稳定性分析
研究非线性系统的稳定性,需要考虑系统的非线性特性,常用的方法有分岔理 论和混沌理论。
振动特性分析
固有频率和模态分析
通过求解系统的运动微分方程,得到系统的固有频率和模态,即系统自由振动的频率和振型。
02
机械系统动力学 第三章 机械系统运动微分方程的求解1
• 3-1机械系统运动方程求解方法-解析法 • 3-2机械系统的运动方程求解方法-数值法 • 3-3机械系统的运动方程求解方法-半解析数
值法
3-1机械系统运动方程求解方法-解析法
3-1-1 单自由度系统的振动
1.问题的提法 工程中大量的动力学问题都可以 归结于图3-1-1 单自由度振动系 统的力学模型,其动力学问题的数 学模型表示为常微分方程的初值 问题 控制方程:
n
3-1机械系统运动方程求解方法-解析法
3-1-1 单自由度系统的振动
在初始条件为 x(0) x0, x(0) x0 欠阻尼条件下,方程的定解
x(t)
ent ( x0
cos d t
x0
x0 d
sin dt)
[1
(
X st
)2 ]2 [2 (
)]2
sin(d t
)
n
n
上中的第一项为单自由度系统自由振动响应,当t
图3-1-1 单自由度振动系 统的力学模型
mx cx kx F(t)
满足初始条件:
x(0) x0, x(0) x0
3-1机械系统运动方程求解方法-解析法
3-1-1 单自由度系统的振动
2. 单自由度振动系统简谐激励作 用下的响应
运动微分方程:
mx cx kx F0 sin t
图3-1-1 单自由度振动系 统的力学模型
3-1机械系统运动方程求解方法-解析法
3-1-1 单自由度系统的振动 2)特解
特解的求法很多,有比较系数法、旋转矢量法、拉 氏变换法等,较简单快捷的方法是旋转矢量法
设特解: x2(t) X sin(t )
代入方程 mx cx kx F0 sin t
机械系统动力学 第三章 机械系统运动微分方程的求解2
3-3机械系统的运动方程求解方法-半解析数值法
解: 2)求 与 t之间的关系
图3-3-9 等效力矩与时间的关系 图3-3-8 等效转动惯量的导数的变化规律
3-3机械系统的运动方程求解方法-半解析数值法
图3-3-10 曲柄角速度与时间的关系
3-3机械系统的运动方程求解方法-半解析数值法
二、等效力矩是等效构件和角速度的函数 Me Me ,
3-2机械系统的运动方程求解方法-数值法
3-2-1 欧拉法
对于常微分方程的定解问题,形如
y f (x, y)
y(x0 )
y0
3-2-1
所谓数值解法, 就是寻求解 y(x) 在一系列离散节点
x1 x2 xn xn1 上的近似值 y1, y2 , , yn , yn1 。
相邻两个节点的间距 hn xn1 xn
一、等效力矩是等效构件转角的函数时,即 M e M e
对上式积分:
ห้องสมุดไป่ตู้ 1
2
J e
2
1 2
J e0 02
0
Me
d
W
J e0 0 2 2W Je
3-3机械系统的运动方程求解方法-半解析数值法
由 d dt d
dt
t t0
d 0
例3-3-1:对于3-2-1所示的偏置曲柄滑块机构,若已
2!
3! t
3-2机械系统的运动方程求解方法-数值法
3-2-2 Newmark- 法
x(t t) x(t) x(t)t x(t) t2 x (t) t3 o(t4)
2!
3!
线性加速度法的迭代公式 1
大致具有3阶精度,将上式的最后一项中
即为Newmark- 法。其迭代公式为
机械动力学
6.机构分析和机构综合。此项内容一般是对机构的结构和运动而言,但随着机械运转速度的提高, 机械动力学已成为分析和综合高速机构时不可缺少的内容。
理论及应用
理论及应用
1.分子机械动力学的研究:作为纳米科技的一个分支,分子机械和分子器件的研究工作受到普遍。 如何针对纳机电系统(NEMS)器件建立科学适用的力学模型,成为解决纳米尺度动力学问题的瓶颈。 分子机械是极其重要的一类NEMS器件.分为天然的与人工的两类。人工分子机械是通过对原子的 人为操纵,合成、制造出具有能量转化机制或运动传递机制的纳米级的生物机械装置。由于分子 机械具有高效节能、环保无噪、原料易得、承载能力大、速度高等特点,加之具有纳米尺度,故 在国防、航天、航空、医学、电子等领域具有十分重要的应用前景,因而受到各发达国家的高度 重视。已经成功研制出多种分子机械,如分子马达、分子齿轮、分子轴承等。但在分子机械实现 其工程化与规模化的过程中,由于理论研究水平的制约,使分子机械的研究工作受到了进一步得 制约。分子机械动力学研究的关键是建立科学合理的力学模型。分子机械动力学采用的力学模型 有两类,第一类是建立在量子力学、分子力学以及波函数理论基础上的离散原子作用模型。
阐述
对刚性转子的平衡已有较成熟的技术和方法:对工作转速接近或超过转子自身固有频率的挠性转 子平衡问题,不论是理论与方法都需要进一步研究。 平面或空间机构中包含有往复运动和平面或空间一般运动的构件,其质心沿一封闭曲线运动。根 据机构的不同结构,可以应用附加配重或附加构件等方法,全部或部分消除其振颤力。但振颤力 矩的全部平衡较难实现。 机械运转过程中能量的平衡和分配关系包括:机械效率的计算和分析,调速器的理论和设计,飞 轮的应用和设计等。 机械振动的分析是机械动力学的基本内容之一,现已发展成为内容丰富、自成体系的一门学科。 机构分析与机构综合一般是对机构的结构和运动而言,但随着机械运转速度提高,机械动力学已 成为分析与综合高速机构时不可缺少的内容。
单自由度机械系统等效动力学模型及速度波动调节
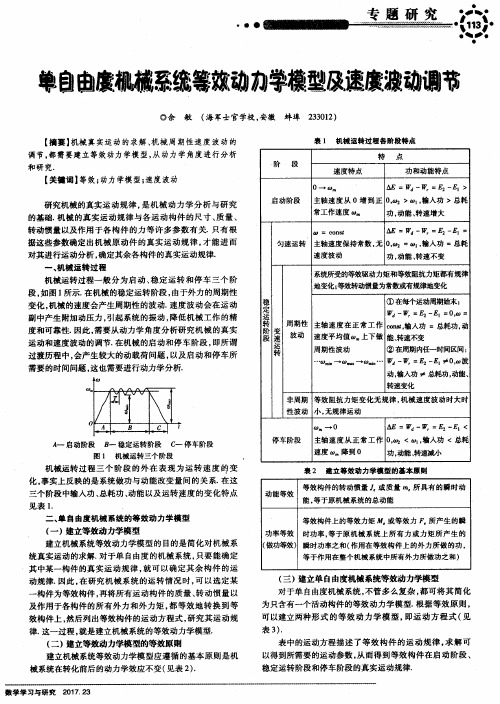
( 一) 建立等效动力学模型 建 立机械系统等效动力学模型 的 目的是简化 对机械 系
统 真实运动的求解. 对 于单 自由度的机械 系统 , 只要能确 定
( 做功等效 ) 瞬时功率之和( 作用 在等效 构件上 的外 力所做的功 ,
等于作用在整个机械系统中所有外力所做 功之 和)
其 中某一构件的真实 运动规 律 , 就 可 以确 定其 余构 件 的运
三个阶段中输入功 、 总耗功 、 动能 以及运 转速度 的变化特 点 见表 1 . 二、 单 自由度机械 系统 的等效动 力学模型
裹2 建立等效动力学模型的基本原则
等效构件的转动惯量 或质量 m 所 具有 的瞬时动
动 能 等 效 能
,
等于原机械系统的总动能
等效构件上的等效力矩 或等效力 所产生的瞬 功率等效 时功率 , 等于原机械 系统 上所 有力 或力矩 所产 生 的
运
变化 , 机械 的速 度会 产生周期性的波动. 速度 波动会在 运动
副 中产生附加动压力 , 引起系统的振动 , 降低 机械工作 的精 度和可靠性. 因此 , 需要从动力学 角度分析研 究机械 的真实 运动和速度波动 的调节. 在机械的启动 和停车 阶段 , 即所谓 过渡历程 中, 会产生较大的动载荷 问题 , 以及 启动和停 车所 需要的时间 问题 , 这也需要进行动力学分析.
专 题 研 究
0 瓣
。
廷.
● , ●
表3 等效动 力学模型 的运动方程
微分 力的形式
方 程
-
丁 。
d 一 e r
L
E … 和E 位置 , 且在这两个位置 M : , 据此确定 [ ] . ( 二 )非周期性速度波动的调节
机械系统动力学课程简介及大纲
课程内容简介课程中文名称:机械系统动力学课程英文名称:Dynamics of mechanical system开课单位:机电工程学院任课教师及职称(3名以上):开课学期:学分:总学时:适用专业:机械制造及其自动化课程内容简介(400字以内):本课程介绍机械系统中常见的动力学问题、机械动力学问题的类型和解决问题的一般过程,讲述刚性机械系统的动力学分析与设计;机构惯性力平衡的原理与方法;含弹性构件的机械系统的动力学;含柔性转子机械的平衡原理与方法;含间隙副机械的动力学;含变质量机械系统动力学以及机械动力学数值仿真数学基础以及相关软件的仿真实例讲解。
通过本课程的学习,使学生能从系统的角度和动力学的观点了解机械产品动态设计的基础知识,掌握当前机械动力学分析的基本方法,学会运用机械多刚体动力学进行复杂机构的动力学分析与综合运用机械弹性动力学和多柔体系统动力学方法对各类典型机构进行弹性动力分析及综合,具备分析和解决工程实际问题的能力。
教材及主要参考书目:1.杨义勇.机械系统动力学.北京: 清华大学出版社,2009.2.陈立平,张云清,任卫群等.机械系统动力学分析及ADAMS应用教程.北京:清华大学出版社,2005.3.徐业宜.高等学校试用教材.北京:机械工业出版社,1991.4.蒋伟.机械动力学分析.北京:中国传媒大学出版社,2005.5.邵忍平. 机械系统动力学.北京:机械工业出版社,20056.唐锡宽,金德闻.机械动力学.北京:高等教育出版社,1983.课程教学大纲课程中文名称:机械系统动力学课程英文名称:Dynamics of mechanical system学分和学时分配:教学目的:本课程着重培养学生对复杂机械系统动力学建模及分析的能力。
通过本课程学习,要求学生掌握当前机械动力学分析的基本方法,学会运用机械多刚体动力学进行复杂机构的动力学分析与综合运用机械弹性动力学和多柔体系统动力学方法对各类典型机构进行弹性动力分析及综合,具备分析和解决工程实际问题的能力。
第3章 单自由度系统
第三章单自由度机械系统动力学3.1 概述在绪论中我们曾指出:机械动力学研究机械在运动时所受的力,以及机械在力作用下的运动。
在第一类问题中,假定输入构件按给定的某种规律运动,计算在此运动情况下需施加于驱动构件上的平衡力矩及运动副中的反力,称为逆动力学。
本书第一章和第二章都属于逆动力学问题。
在第二类问题中,抛掉输入构件按某种给定规律运动的假定,求解在施加于机械的真实外力的作用下,机械系统的运动随时间而变化的规律,称为正动力学。
本章即讨论正动力学问题。
图3.1.1A一停车阶段B一启动阶段;C稳定运转阶段;机械运转的三个阶段,如图3.1.1所示,机械系统从启动到停车的全过程中包含三个阶段:启动阶段(A)稳定运转阶段(B)和停车阶段(C)。
在机械的稳定运转阶段,由于外力的周期性变化,机械的速度会产生周期性的波动。
速度波动会在运动副中产生附加动压力,引起系统的振动,降低机械工作的精度和可靠性。
研究机械的真实运动和调节速度波动的方法就需要进行动力学分析。
在机械的启动阶段和停车阶段,即所谓过渡历程中,会产生较大的动载荷。
在进行机械零部件的强度计算时,常需要知道这一动载荷。
对启动频繁的机械,启动和制动所需要的时间也常常是人们感兴趣的问题。
这也都需要进行动力学分析。
本章首先研究应用最为广泛的单自由度机械系统的动力学分析。
在研究单自由度机械系统时历来都采用一种等效力学模型来代替原有的机械系统。
本章仍介绍这种传统的方法。
这种传统方法只局限在单自由度系统中应用,而不适用于多自由度系统。
由于各种自动机和机器人的出现,多自由度系统应用越来越广泛。
基于多自由度系统分析的需要,提出了多种动力学建模方法,并开发了相应的计算机软件。
单自由度系统是多自由度系统的一个特例,当然也可以用这类通用的方法和软件来进行分析。
在下一章中研究多自由度机械系统的 1动力学分析时,我们再对这些建模方法做一综合介绍。
单自由度机械系统动力学分析大体包括以下几个步骤:1)将实际的机械系统简化为等效动力学模型;2)根据等效动力学模型列出系统的运动微分方程;3)应用解析方法或数值方法求解系统运动微分方程,求出等效构件的运动规律。
机械动力学
vSjy aSjy ) J j j j ]
例题P72
§3.4 动力学方程式的求解 注意:关键是确定等效转动惯量和等效力矩的关系式(解析式、图表形式等)
一、等效转动惯量和等效力矩均为位置的函数
(Md=Md(),Mr=Mr(), Me=Me(),Je=Je())
1. 等效构件的角速度
❖
1 2
式中第二项符号的确定方法为:当Mj与ωj同向时取正号,反向时取负号。
广义力就是作用在广义坐标处的一个力或力矩,它所作的功等于系统中 全部力和力矩在同一时间内所作的功。
广义坐标为一个角位移时,广义力F为一等效力矩Me,它可按下式计算:
F
Me
m ( Fkvk
k 1
cosk
q
)
m
(M j
j 1
j )
q
Me表示式中的广义传动比 j / q、vk / q是由机构的尺度和位置决定的, Me仅仅是机构广义坐标q的函数,与广义速度 q 的变化无关。
单自由度机械系统的动力学方程:
J e q
1 2
J e q
q2
Me
三、等效力学模型
机械系统是复杂多样的,在进行动力学研究时,通常要将复杂 的机械系统,按一定的原则简化为一个便于研究的等效动力学模型。
2、等效条件 (1) 等效构件所具有的动能等于原机械系统的总动能; (2) 等效构件的瞬时功率等于原机械系统的总瞬时功率。
3、等效参数 (1) 等效质量me,等效转动惯量Je; (2) 等效力Fe,等效力矩Me。
等效动力学模型的建立
对于单自由度的机械系统,只要知道其中一个构件的运 动规律其余所有构件的运动规律就可随之求得。因此可把复杂 的机械系统简化成一个构件(称为等效构件),建立最简单的等 效动力学模型,将使研究机械真实运动的问题大为简化。当等 效构件为一个绕机架转动的构件时,模型为图a。当等效构件 为一个移动滑块时,模型为图b 。
第3章_单自由度体系
不同结构的自振周期可能相差很大,从一般平房的0.1 秒,到200m左右高度的超高层结构的4~5秒,到大型 悬索桥的17秒不等。
第3章 单自由度体系
3.2 有阻尼自由振动
3.2 有阻尼自由振动
自由振动: p(t)=0
运动方程: mu cu ku 0
初始条件:u(t) t0 u(0) u(t) t0 u(0)
u(t)
e
nt
[u(0)
cosDt
(
u(0)
D
nu(0)
)
sin
Dt
]
3.2.3 运动的衰减和阻尼比的测量
相邻振动峰值比:
ui ui1
u(ti ) u(ti TD )
exp(nTD )
exp(
2 ) 1 2
u(t) u1
TD
TD
ui ui+1
ti
ti+TD
t
——相邻振幅比仅与阻尼比有关,而与i的取值无关。
将: c 2mn
c c ccr 2mn
代入:
s1,2
c 2m
(
c )2 2m
n2
得: s1,2 n in 1 2 n iD
3.2.2 低阻尼体系(Underdamped Systems)
u est s1,2 n iD
低阻尼体系满足初始条件的自由振动解:
u(t
)
e
nt
[u(0)
3.1 无阻尼自由振动
mu(t) cu(t) ku(t) p(t)
无阻尼:c=0 自由振动:p(t)=0
运动方程: mu(t) ku(t) 0
初始条件: u(t) t0 u(0) u(t) t0 u(0)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Me表示式中的广义传动比 j / q 、vk / q 是由机构的尺度和位置决定的, Me仅仅是机构广义坐标q的函数,与广义速度 q 的变化无关。
1、系统的动能 设机械系统中的第i个构件做一般平面运动,启动能Eki可表示为
Eki
1 2
m v2 i si
1 2
J 2 Si i
式中:mi——构件i的质量; JSi——构件i相对于其质心的转动惯量; vSi——构件i质心的速度; ωi——构件i的角速度。
作平动的构件的动能只含上式的第一项,作绕质心的定轴转动 的构件则只含第二项。
第二,研究机械运转速度波动产生的原因及其调节 方法。
机械运转的三个阶段
1.启动阶段 原动件的速度由零逐渐上升到开始稳定的过程。 2.稳定运转阶段 1)周期变速稳定运转:角速度ω≠常数,产生周期性波动,会在运动副
中产生附加动反力,需进行动力学分析。 2)等速运转:ω=常数的稳定运转。 3.停车阶段 原动件的速度从正常工作速度下降到零的阶段。 在启动和制动阶段是会产生较大的动载荷,需进行动力学计算。
电机铭牌上给出如下数据: 额定功率PH(kW),额定转速nH (r/min),同步转速n0(r/min); 最大转矩MK与额定转矩MH的比值 λ=MK/MH; 启动转矩MD与额定转矩MH的比值
λ1=MD/MH
通过铭牌上得数据可确定机械特性曲线上四个特征点的坐标:A(MK,ωK), A(MH,ωH), A(0,ω0), A(MD,0)。
义坐标为一线性位移时Fi为一个力; n——系统的广义坐标数。
利用拉格朗日方程进行系统的动力学分析时,先选定系统的广 义坐标,然后列出系统动能、势能和广义力的表达式,代入拉格朗 日方程中,即可导出系统的动力学方程。
二、单自由度机械系统的动力学方程
单自由度系统只有一个广义坐标,用q表示。对主动构件做回转 运动这种一般情况,常将主动构件的转角选定为系统的广义坐标。 整个系统的能量和机械功均可表示为这个广义坐标的函数。
生产阻力的几种情况:
1、生产阻力为常数,例如起重机、轧钢机、刨床等。 2、生产阻力随位移而变化,例如活塞式的压缩机和泵、曲柄压力机 等。 3、生产阻力随速度而变化,例如鼓风机、离心泵、螺旋桨。 4、生产阻力随时间而变化,例如球磨机、揉面机等。
驱动力的几种情况:
1、驱动力是常数,例如以重锤作为驱动装置的情况; 2、驱动力是位移的函数,例如用弹簧作驱动件时; 3、驱动力是速度的函数,例如一般的电动机,机械特性均表示为输 出力矩随角速度变化的曲线。
机械系统全部构件的动能总和为
Ek
l i 1
Eki
l
i 1
(
1 2
mi
v
2
si
1 2
J
Si
2
i
)
式中l为活动构件总数
动能也可以表示为
Ek
1 2
Jeq 2
式中
J e
i
l 1
[mi
(
vSi q
)2
J
Si
(
i
q
)2 ]
Je称为系统的等效转动惯量。 q 称为广义速度,是随时间变化的。
2Hale Waihona Puke 系统的势能 对刚体机械系统,不计构件的弹性变形和变形能,而且一般情
§3.3 单自由度机械系统的动力学方程
一、拉格朗日方程
拉格朗日方程:
d dt
( Ek qi
) Ek qi
Ep qi
Fi (i
1,2,...,n)
式中:Ek——系统的动能; Ep——系统的势能; qi——广义坐标,它是可以完全确定机械系统运动的一组独立
参数; Fi——广义力,当广义坐标为一角位移时Fi为一个力矩,当广
§3.2 作用在机械上的力
一、作用在机械上的力的特征
在机械上作用的力:
驱动力 由原动机发出并传给驱动构件的力,此力在一个运动循环內作正
功。 生产阻力
完成有用功时作用于机械上的阻力,此功做负功。 重力
当构件的重心向上运动或向下运动时分别作负功或正功,在一个 循环内作功为零。 摩擦力
由运动副表面的摩擦产生的有害阻力,作负功。
§3.1 概 述
机械的真实运动规律是由作用于机械上的外力、各 构件的质量、尺寸及转动惯量等因素决定的,而研究机 械在外力作用下的真实运动则是机械动力学的基本问题 (机械动力学的正问题)。本章主要研究两个问题:
第一,研究单自由度机械系统在外力作用下的真实 运动规律,即机械系统的运动随时间的变化规律。掌握 通过建立动力学模型建立力与运动参数之间的运动微分 方程来研究真实运动规律的方法。
例题 某起吊重物用的电动葫芦的电动机,型号为Y90L-4,额定功率
PH=1.5kW,同步转速n0=1500r/min,额定转速nH=1410r/min,求 该电动机在额定转速附近的机械性能。
解:在加载过程中电动机角速度只在额定角速度附近波动,可采用 直线形式的机械特性
例题
电动机型号Y100L2-4,额定功率PH=3kW,同步转速n0=1500r/min, 额定转速nH=1420r/min,最大转矩与额定转速之比λ=MK/MH=2.2,推导出三 相异步电动机机械特性图中AC段的机械特性。
况下,由构件的重量产生的势能与动能相对数值也很小,因此拉格 朗日方程中的势能常常可以略去。
3、系统的广义力 设Fk(k=1,2,…,m)和Mj(j=1,2,…,n)分别为作用于机
械上的外力和外力矩,则这些力和力矩的功率为
m
n
P (Fkvk cosk ) (M j j )
k 1
j 1
式中:ωj——有外力矩Mj作用的构件的角速度; vk——外力Fk作用点的速度; αk——Fk与vk的夹角。
式中第二项符号的确定方法为:当Mj与ωj同向时取正号,反向时取负号。
广义力就是作用在广义坐标处的一个力或力矩,它所作的功等于系统中 全部力和力矩在同一时间内所作的功。
广义坐标为一个角位移时,广义力F为一等效力矩Me,它可按下式计算:
F
Me
m ( Fkvk
k 1
cosk
q
)
m
(M j
j 1
j
q
)
二、三相异步电动机的机械特性
如图所示,三相异步电动机的输出力矩随角速度变化的曲线,称 为机械特性。AC段的运转是稳定的,当外载荷加大而导致机械减速 时,输出力矩将增加,并与外载荷达到新的平衡。而AD段的运转是 不稳定的,而外载荷增加导致转速下降时,输出力矩也下降,更无法 与外载荷平衡,造成转速进一步下降,直至停车。因此三相异步电动 机应在AC段工作。点B是电动机的额定工作点。