基于Matlab的客车转向侧翻稳定性分析(精)
利用MATLAB软件计算汽车质心位置用于行驶稳定性分析
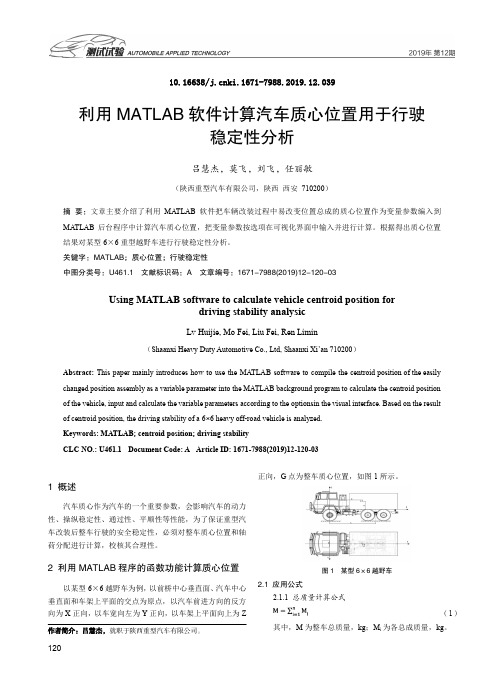
图 1 某型 6×6 越野车 2.1 应用公式
2.1.1 总质量计算公式
(1) 其中,M 为整车总质量,kg;Mi 为各总成质量,kg。
120
吕慧杰 等:利用 MATLAB 软件计算汽车质心位置用于行驶稳定性分析 2.1.2 整车质心计算公式
(2)
其中,X、Y、Z 为整车质心位置坐标;Xi、Yi、Zi 为各 总成质心位置坐标。
1 概述
正向,G 点为整车质心位置,如图 1 所示。
汽车质心作为汽车的一个重要参数,会影响汽车的动力 性、操纵稳定性、通过性、平顺性等性能,为了保证重型汽 车改装后整车行驶的安全稳定性,必须对整车质心位置和轴 荷分配进行计算,校核其合理性。
2 利用 MATLAB 程序的函数功能计算质心位置
以某型 6×6 越野车为例,以前桥中心垂直面、汽车中心 垂直面和车架上平面的交点为原点,以汽车前进方向的反方 向为 X 正向,以车宽向左为 Y 正向,以车架上平面向上为 Z 作者简介:吕慧杰,就职于陕西重型汽车有限公司。
mjhg
当 N2=0 时,mj=mgsinαmax- amgcosαmax/hg
2.1.3 整车前后轴荷计算公式
(3)
图 3 车辆满载上坡行驶 受力分析图
图 4 车辆满载下坡行驶 受力分析图
其中,M 前、M 后分别为整车前后桥轴荷,kg;L 为整车
轴距。
2.2 收集数据并利用 MATLAB 计算质心位置
收集某型 6×6 越野车各总成数据并在 MATLAB 程序中根
据上述公式和各总成数据编写函数程序,将函数结果生成可
解得:αφ=arctan(φ-f)=31.8° 由计算结果可知,αmax>αφ,说明汽车在坡道上上行时, 汽车发生纵向颠覆之前,先发生驱动轮打滑。
汽车转向侧翻稳定性分析

程[ 2 1 汽车侧翻分为动态侧翻和静态侧翻 , 而动态侧 回正力矩 的作用 ; 假设横向速度 , 横摆角速度及侧倾 翻又分为“ 绊倒” 侧翻和“ 非绊倒” 侧翻。“ 绊倒” 侧翻 角速度都远小于车速。建立七 自由度模型如图 1 。
是指汽车在运动中与道路边缘冲撞或汽 车滑移 向软 质 路 面 引起 的侧 翻行 为 ; “ 非 绊 倒 ”侧 翻是 指 汽车 在
极 限行 驶状 态 下 , 例 如 高速 行驶 时转弯 角 过 大 , 汽 车 因受 到 地 面侧 向摩 擦 力 过 大而 引起 的侧 翻行 为 。本
文所提到 的侧 翻如不特别说明 , 一律指“ 非绊倒 ” 侧 翻 。本 文 以三 自由度模 型 为基础 , 建 立 了七 自由度模 型侧翻模型 , 应用 M a l f a b 完成稳态转 向仿真。 根据仿 真结果 分析汽 车结构参数对 汽车抗侧 翻能力 的影 响, 提出汽车的设计的科学依据 。
一
根 据 轮 胎 侧 倔 特 性 : T
耻 蝴
{
I ቤተ መጻሕፍቲ ባይዱ
一k y ( a r c t a n ‘
一 。
卜
( 1 I )
I = R= 一 k b = 一 k b a r c t a n (
)
其中 、 k 前轮和后轮的侧偏刚度 。整理后得 :
侧翻事故 。美国致命事故分析报告系统显示 , 在轻型 变 ; 忽略 轮胎 及悬 架 的非 线性 因素 ; 忽 略 地 面切 向力 车辆 单 车碰撞 事故 中, 5 4%的致命 事故 与侧 翻有关【 ” 。 与侧偏 力 对 轮胎侧 倾 特 性 的影 响 ;忽 略 左右 轮 胎 因 汽车侧 翻定义为汽车行驶过程 中绕其纵轴转动 载荷 变化 而 引起 的 轮胎 特性 的 变化 ,即 同轴 的两 个 9 0 o或 更 多 , 以 至 车 身 与 地 面 相 接 触 的危 险运 动 过 车轮在 x y 平面内有相同的转角和侧偏角 ;忽略轮胎
基于MATLABSimulink的车辆转向稳定性的仿真研究

10.16638/ki.1671-7988.2021.03.010基于MATLAB/Simulink的车辆转向稳定性的仿真研究马园杰,周旭(湖北汽车工业学院机械工程学院,湖北十堰442000)摘要:汽车的操纵稳定性是衡量汽车安全性最基本的指标之一,影响汽车行驶稳定性的基本因素主要有横摆角速度与质心侧偏角,将汽车简化为二自由度模型,建立关于横摆角速度与质心侧偏角的转向微分方程。
基于MA TLAB/Simulink软件建立仿真模型,对前轮转向与四轮转向典型的二自由度汽车模型进行仿真分析。
对比两轮转向和四轮转向的稳定性。
且四轮转向采用线控转向,将线控转向系统与四轮转向系统的优点结合起来,观察采用线控对汽车稳定性的影响。
关键词:二轮转向;四轮转向;横摆角速度;质心侧偏角中图分类号:TP391.9;U463.41 文献标示码:A 文章编号:1671-7988(2021)03-34-03 Simulation Research on Vehicle steering stability based on MATLAB/SimulinkMa Yuanjie, Zhou Xu(Department of Mechanical Engineering, Hubei University of Automotive Technology, Hubei Shiyan 442000)Abstract:Vehicle handing stability is the index to measure automobile safety. Yaw velocity and side slip angle are the basic factors that affect the vehicle handing stability. Simplify the car to two degree of freedom model. This paper establi -shed the differential equations of Yaw velocity and side slip angle. Using the MA TLAB/Simulinl to create the simulation model and analyze the stability of Vehicle steering system. Combine the advantage of the wire steering system with four wheel steering , Observe its effect on stability.Keywords: Two wheel steering; Four wheel steering; Yaw velocity; Side slip angleCLC NO.: TP391.9; U463.41 Document Code: A Article ID: 1671-7988(2021)03-34-03前言随着人们对现代汽车安全性及操纵稳定性的关注,汽车行驶稳定性越来越成为人们备受关注的焦点。
基于MATLAB的汽车电子稳定系统的研究与仿真
科技发展中心制
汽车在高速或低附着系数路面上转向行驶或受到侧向干扰
时,轮胎与地面的侧向附着系数很容易达到附着极限而发生侧
滑,而使丧失操纵稳定性,进一步引发交通事故。ESP—车身电
子稳定系统正是工作于此种工况,通过对车轮主动实施制动,
项 来改善汽车的操纵稳定性,使驾驶员能够对车辆进行正常操
纵,保证汽车行驶的稳定性。
二、 国内外现状及发展趋势
研究初期,人们提出了有关ESP的一些解决方案,并未进行实际 的应用。第一个ESP的解决方案由vanZanten等提出,他通过改变汽 车在全制动转弯时车轮滑动率的分配,来降低车辆的偏航,同时也 减少了制动距离;HeeB等提出了另一种解决方案,将ABS、ASR、 悬架控制、转向控制作为子系统添加到车辆的动态控制系统中;同 时一些有关通过四轮转向,四轮驱动和主动悬架等来改善汽车稳定 性的文献也有发表;McLellan等在文献中提到通过利用ABS和ASR 来控制车辆的动态运动,并指出通过利用驾驶员期望的汽车运动与 汽车实际运动之间的差别来单独控制车轮滑动率的必要性。
各汽车制造厂商所研发的汽车稳定系统的功能与ESP系统的功 能相似,只是采用了不同的英文缩写。例如,宝马公司将其称为 DSC系统,而保时捷和丰田公司则将其分别称为PSM和VSC系统。 如今所有奔驰牌轿车均早己安装了该系统,大众和宝马公司也逐步 将其由选装改为标准配置。
国内对汽车动力学稳定性控制的研究起步较晚,大多数学者只 是基于理论研,目前还没有成熟产品问世。国内对ESP的研究大都 通过模拟仿真的形式,来揭示ESP系统的设计中所具体遇到的问
基于Matlab_Simulink和神经网络的四轮转向车辆控制研究
β1
β β2 β β1
β2
o1
(a)
o2
β2 β1
(b)
β2
β1
o1
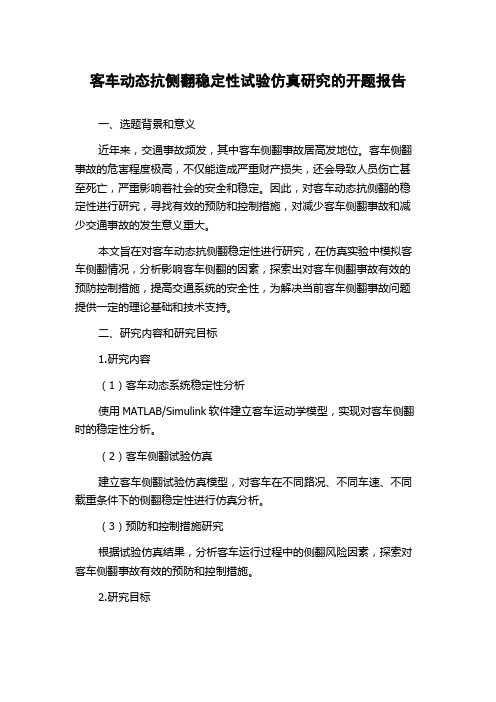
(c) (a)前轮低速转向 (c)四轮低速转向 图 1.1
o2
(d) (b)前轮高速转向 (d)四轮高速转向
两轮转向与四轮转向的对比
1
基于 Matlab/Simulink 和神经网络的四轮转向车辆控制研究
四轮转向的车辆在低速时,在后轮上附加一个与前轮转角相反的转角,可 以减小车辆的转弯半径。 由阿克曼 (Ackerman) 转向模型即可得出这样的结论[3], 即当前轮转角相同时,四轮转向车辆的转弯半径明显小于前轮转向车辆,使车 辆在低速转弯时更加灵活[4-8]。
Key words: 4WS, Nonlinear Tire, Neural Network, Handling and Stability, Simulation Analysis
基于 Matlab/Simulink 和神经网络的四轮转向车辆控制研究
第一章 绪论
1.1 四轮转向原理简介
随着汽车工业的不断发展,改善车辆的操纵稳定性,使驾乘更加舒适和安 全,是现今汽车技术的一个重要发展方向[1]。作为提高车辆操纵稳定性、主动安 全性的四轮转向技术在这种背景下应运而生,并得到了很大的发展。 四轮转向技术能使车辆在转弯时后轮直接参与对车辆侧偏角和侧向运动的 控制,不仅可以减少转向力产生的滞后,而且还能独立地控制车辆的运动轨迹 与姿态[2]。图 1.1 所示为两轮转向与四轮转向的对比[2],其中(a)和(b)为前轮转向 情况,(c)和(d)为四轮转向情况。由图可见,四轮转向车辆的姿态得以控制,车 辆的方向角与航向角重合,提高了车辆的侧向稳定性。
客车动态抗侧翻稳定性试验仿真研究的开题报告
客车动态抗侧翻稳定性试验仿真研究的开题报告一、选题背景和意义近年来,交通事故频发,其中客车侧翻事故居高发地位。
客车侧翻事故的危害程度极高,不仅能造成严重财产损失,还会导致人员伤亡甚至死亡,严重影响着社会的安全和稳定。
因此,对客车动态抗侧翻的稳定性进行研究,寻找有效的预防和控制措施,对减少客车侧翻事故和减少交通事故的发生意义重大。
本文旨在对客车动态抗侧翻稳定性进行研究,在仿真实验中模拟客车侧翻情况,分析影响客车侧翻的因素,探索出对客车侧翻事故有效的预防控制措施,提高交通系统的安全性,为解决当前客车侧翻事故问题提供一定的理论基础和技术支持。
二、研究内容和研究目标1.研究内容(1)客车动态系统稳定性分析使用MATLAB/Simulink软件建立客车运动学模型,实现对客车侧翻时的稳定性分析。
(2)客车侧翻试验仿真建立客车侧翻试验仿真模型,对客车在不同路况、不同车速、不同载重条件下的侧翻稳定性进行仿真分析。
(3)预防和控制措施研究根据试验仿真结果,分析客车运行过程中的侧翻风险因素,探索对客车侧翻事故有效的预防和控制措施。
2.研究目标通过对客车动态抗侧翻稳定性试验仿真的研究和分析,达到以下目标:(1)了解客车动力学稳定性的变化规律,分析影响客车侧翻的因素。
(2)建立客车侧翻试验仿真模型,模拟客车在不同路况、不同车速、不同载重条件下的侧翻情况,探索客车侧翻的特征和规律。
(3)寻找有效的预防和控制措施,以降低客车侧翻事故的发生率,提高客车的安全性和稳定性。
三、研究方法1.客车动力学稳定性分析方法本文采用MATLAB/Simulink软件建立客车运动学模型,分析客车运动过程中的各种力学因素,探讨客车动态系统的稳定性变化规律。
2.客车侧翻试验仿真方法本文基于ADAMS软件建立客车侧翻试验仿真模型,模拟客车在不同路况、不同车速、不同载重条件下的运动情况,分析影响客车侧翻的因素,探索客车侧翻的特征和规律。
3.预防和控制措施研究方法本文通过客车侧翻试验仿真分析,分析客车运行过程中的侧翻风险因素,探索对客车侧翻事故有效的预防和控制措施,为提高客车的安全性和稳定性提供理论支持。
基于matlab的大客车操纵稳定性建模与研究

基于matlab的大客车操纵稳定性建模与研究近年来,大客车的操纵稳定性和安全性问题日益受到关注,针对这一问题本文提出了一种基于Matlab的大客车操纵稳定性建模与研究的方法。
首先,根据大客车的物理性能,构建了一个多模型的Matlab 仿真程序,其中包括大客车的物理运动模型和车辆操纵系统。
然后,对仿真程序进行了系统分析,探讨了大客车操纵稳定性的相关因素,以及操纵精度如何影响操纵稳定性。
最后,利用仿真实验,验证了Matlab仿真程序的准确性。
结果表明,基于Matlab的大客车操纵稳定性建模与研究方法是可行的。
1 Introduction随着交通运输业的发展,大客车在日常交通环境中发挥着重要的作用,但是它的操纵稳定性和安全性问题一直困扰着交通安全研究者。
因此,研究大客车的操纵稳定性是交通安全领域的一个重要课题。
为了解决这一问题,本文采用基于Matlab的建模和仿真方法,对大客车的操纵稳定性进行了研究。
2 Theory2.1 Model根据大客车的物理性能,构造了一个多状态的Matlab仿真程序,包括大客车的物理运动模型和操纵系统模型。
其中,大客车的物理运动模型由线性动力学方程组构成,可以描述大客车在水平面上的运动;操纵系统模型是一个简单的PID控制器,用于模拟大客车操纵过程。
2.2 Analysis通过对仿真程序进行系统分析,探讨了大客车操纵稳定性的相关因素,以及操纵精度如何影响操纵稳定性。
3 Experiment仿真实验用于验证模型的准确性以及车辆操纵稳定性。
仿真实验包括假想试验和实际试验。
在假想试验中,通过改变控制精度来检查大客车操纵稳定性的变化规律。
在实际试验中,使用实际数据来验证仿真结果的准确性。
4 Conclusion本文提出了一种基于Matlab的大客车操纵稳定性建模与研究的方法。
仿真实验表明,Matlab仿真可以准确描述大客车的操纵特性,揭示大客车操纵稳定性的内在规律,提供了有效的操纵稳定性分析技术。
详细步骤MATLAB车辆两自由度操纵稳定性模型分析

基于MATLAB的车辆两自由度操纵稳定性模型及分析汽车操纵稳定性是汽车高速安全行驶的生命线,是汽车主动安全性的重要因素之一;汽车操纵稳定性一直汽车整车性能研究领域的重要课题。
本文采用MATLAB仿真建立了汽车二自由度动力学模型,通过仿真分析了不同车速、不同质量和不同侧偏刚度对汽车操纵稳定性的影响。
研究表明,降低汽车行驶速度,增加前后轮侧偏刚度和减小汽车质量可以减小质心侧偏角,使固有圆频率增加降低行驶车速还可以使阻尼比增加,超调量及稳定时间减少。
车辆操纵稳定性评价主要有客观评价和主观评价俩种方法。
客观评价是通过标准实验得到汽车状态量,再计算汽车操纵稳定性的评价指标,这可通过实车实验和模拟仿真完成,在车辆开发初期可通过车辆动力仿真进行车辆操纵稳定性研究。
1二自由度汽车模为了便于掌握操纵稳定性的基本特性,对汽车简化为线性二自由度的汽车模型,忽略转向系统的影响,直接一前轮转角作为输入;忽略悬架的作用,认为汽车车厢只作用于地面的平面运动。
2 运动学分析确定汽车质心的(绝对)加速度在车辆坐标系的分量a a 和a a 。
Ox 与Oy 为车辆坐标系的纵轴与横轴。
质心速度a 1与t 时刻在Ox 轴上的分量为u ,在oy 轴上的分量为v 。
沿Ox 轴速度分量的变化为:()()cos sin cos cos sin sin u u u v v u u u v v θθθθθθ+∆∆--+∆∆=∆+∆∆---∆∆考虑到∆θ很小并忽略二阶微量,上式变成:除以∆t并取极限,便是汽车质心绝对加速度在车辆坐标系。
沿Ox 轴速度分量的变化为:u x r d d v u v dt dt a θω=-=-同理,汽车质心绝对加速度沿横轴oy 上的分量为:y rv u a ω=+二自由度动力学方程二自由度汽车受到的外力沿y 轴方向的合力与绕质心的力矩和为:1212cos a cos YY Y ZY Y b F F FM F Fδδ=+=-∑∑式中,a a 1,a a 2为地面对前后轮的侧向反作用力;δ为前轮转角。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于Matlab 的客车转向侧翻稳定性分析
摘要:本文主要对客车转向行驶时的侧翻情况进行了研究,建立了客车在行驶过程中转向时的数学模型,推导出了稳态转向时客车侧翻临界车速的计算公式,并结合某客车结构参数和路面附着条件进行了仿真,得出了通过提高客车的抗侧翻性能来提高客车的行驶稳定性的方法。
关键词:客车;转向侧翻;稳定性分析;Matlab
0 引言
侧翻是指汽车在行驶过程中绕其纵轴转动900 或更大的角度,以至车身与地面相接触的一种极其危险的侧向运动。
汽车侧翻可分为两类:一是曲线运动引起的侧翻,二是绊倒侧翻。
曲线运动引起的侧翻是指汽车在道路(包括侧向坡道)上行驶时,由于汽车的侧向加速度超过一定限值,使得汽车内侧车轮的垂直反力为零而引起的侧翻[1]。
客车车身和质量比轿车等小型车大得多,而且其地板一般都比较高,在转向侧翻事故中,车体将向某一侧倾倒,与地面接触的侧围会产生变形,结构的变形可能侵入车厢内部,对乘客造成伤害[2]。
而侧翻试验是较难实施的且成本较大,本文通过建立客车侧翻的数学模型,在Matlab 中进行仿真来分析影响客车转向行驶稳定性的因素,从而为提高客车的操纵稳定性,在设计阶段保证客车结构参数的合理性,避免车辆行驶发生翻车事故奠定理论基础。
1 车辆转向侧翻模型
客车的前后桥一般采用非独立悬架,在行驶过程中遇到弯道或避开障碍物时需要紧急转向。
转向时车辆的质心绕转向瞬心C 作圆周运动。
Rr 为转向瞬心C 到后内侧车轮的转向半径;Rf 为转向瞬心C 到前内侧车轮的转向半径;θ 为汽车转向轮转过的角度;L 为汽车的轴距;汽车质心到前桥距离为a;汽车质心到到后桥距离为b。
2 车辆转向时的受力分析
车辆在转向时,会使车身向外侧倾斜,Gs 为客车车身的悬挂质量受的重力;Gu1 为客车前桥的非悬挂质量受的重力;Gu2为客车后桥的非悬挂质量受的重力;Fyi1,Fyi2 分别为地面给转向内侧车轮的侧向附着力;Fyo1,Fyo2 分别为地面给转向外侧车轮的侧向附着力;Fzi1,Fzi2 分别为地面给转向内侧车轮的支撑反力;Fzo1,Fzo2 分别为地面给转向外侧车轮的支撑反力;Fsy 为客车车身的悬挂质量转向时产生的侧向力;Fuy1,Fuy2 为前后车桥非悬挂质量产生的侧向力。
根据车辆转向时受力分析,为路面附着系数。
设Ms 为客车车身的悬挂质量;Mu1、Mu2 为客车前后桥的非悬挂质量;asy 为客车车身悬挂质量的侧向加速度;auy1、auy2 为客车前后桥非悬挂质量的侧向加速度。
3 车辆转向临界侧翻状态分析
转向时由于悬架的弹性变形,车身悬挂质量会向转向外侧倾斜,使其质心发生了偏移,同时使车身发生了侧倾。
设侧倾角为φ,侧倾角的大小与悬架的侧倾角刚度有关。
由于车轮的弹性变形,内侧车轮与外侧车轮的载荷发生了转移,外侧车轮载荷变大,内侧车轮载荷变小,这样内侧车轮弹性变形减小,外侧车轮弹性变相增大,车桥也发生了微小侧倾,如图3所示。
当转向内侧车轮所受地面支撑反力为零时,可认为汽车已达到转向侧翻的临界状态[3]。
Fzo 为转向时外侧车轮所受的力;Fzi 为转向时内侧车轮所受的力;φ 为转向离心力引起的车身侧倾角;Fyi,Fyo 分别为地面对内、外侧车轮的侧向反力;B 是轮距;hg 是车身悬挂质量的质心高度;hr 是非悬挂质量的质心高度。
4 影响车辆侧翻稳定性的因素分析
影响车辆侧翻稳定性的因素可分为两大类:一是与汽车设计参数有关的部分,如车辆整备质量、质心高度、车辆轮距和悬架特性参数等;二是与车辆行驶状态有关的部分,如车辆行驶速度、转弯半径、路面附着系数、驾驶员操作等[5]。
利用Matlab 软件,分析了质心高度、轮距、侧倾角、转向半径、路面附着系数对车辆转向侧翻的影响。
4.1 质心高度、轮距汽车质心高度与汽车侧翻系数成非线性关系,影响汽车质心高度的因素很多并对汽车侧翻阈值影响很大。
而质心高度与车辆的载重、悬架特性、车速等相关。
轮距受汽车最大车宽限制,其值是一个定值。
由式(15)可知,轮距对汽车侧翻的影响很大,轮距的增加可提高汽车的侧翻稳定性。
质心高度越高,车辆临界稳定车速越低。
质心高度的降低,有利于提高汽车转向行驶的临界稳定车速,因此有效地降低客车的重心,有利于提高其转向稳定性。
当质心高度一定时,增加轮距可以提高车辆的临界稳定车速。
因此,在满足设计要求的同时,尽可能的增加轮距对于提高客车转向稳定性有一定的意义。
4.2 侧倾角在研究车辆侧翻稳定性时,引入“侧倾中心”的概念,即将车身相对地面转动时的瞬时轴线称为车身侧倾轴线,该轴线通过汽车前、后轴处横断面上的瞬时转动中心为侧倾中心,它的位置取决于悬架系统的结构和特性参数等。
车身的侧倾角与临界车速的关系如图5 所示。
侧倾角与临界车速基本成线性关系,车身的侧倾角越小,车辆转向临界稳定车速越大。
车辆转向时车身侧倾角与悬架的侧倾角刚度有关,悬架的侧倾角刚度越大,车身发生侧倾的角度越小,故增大悬架的侧倾角刚度,可以改善车辆侧翻稳定性。
4.3 转向半径由式(8)可知,转向半径对侧向加速度影响很大,转向半
径越大,侧向加速度越小,对于车辆的转向行驶稳定性越有利。
转向半径与临界车速的关系可以看出随着转向半径的增大,车辆临界稳定车速也增大。
可见,汽车行驶时转向过急,导致转向半径过小,车辆可能发生侧翻的速度越低,即在低速时就可能发生侧翻的危险。
4.4 路面附着系数路面条件对于车辆转向稳定性也起着至关重要的作用,车辆在何种路面上行驶对于转向的安全也起着决定性的作用。
路面附着系数与临界车速的关系从图7 中可以看出随着路面附着性能的改善,客车转向行驶的临界稳定车速随之增加,转向轮转过的角度越小,临界车速越大,行驶越安全。
故改善客车行驶的路面环境有利于提高其行驶的稳定性。
5 结论
本文建立了客车在行驶过程中转向时的转向模型,推导出了车辆侧翻临界车速的计算公式,结合相关的车辆结构参数和路面附着条件在Matlab 中进行了仿真。
通过对仿真结果得出了结论:增大车辆的轮距、降低车辆的质心高度、增大车辆悬架的侧倾角刚度、增加转向时的半径、改善路面附着条件,可以提高车辆转向时的侧翻稳定性。
这为车辆在结构设计阶段改善其行驶稳定性奠定了理论基础。
本工程硕士论文源自。