ALENIA雷达讲义
Alenia雷达远程集中监视系统设计与实现
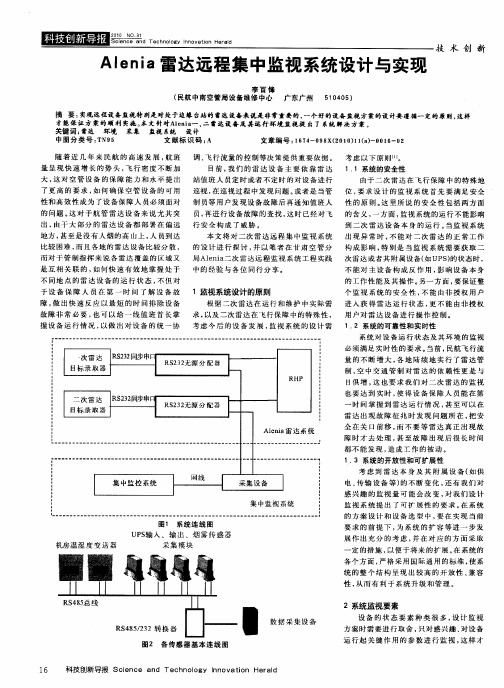
握 设 备 运 行 情 况 , 做 出 对 设 备 的 统 一 协 考 虑 今 后 的 设 备 发 展 , 视 系 统 的 设计 需 1. 系统的 可靠性 和 实时性 以 监 2 必 须 满足 实 时 性 的 要 求 。 当前 , 航 飞行 流 民
量 的 不 断 增大 , 地 陆 续 地 实 行 了 雷 达 管 各
摘 要: 实现远程设备 监视 特别是对处 于边 缘 台站的 雷达 设备来说是非常重要 的, 一个 好的设备监视方案 的设计要遵循一 定的原则 。 这样 才能保 证 方案 的顺 利实施 。 文针对 A e i一 , 雷达设 备及 其运 行环境 监视 提 出了 系统解 决 方案 。 本 ln a 二 关键 词 : 雷达 环境 采集 监视 系统 设计 中图 分 类号 : N 5 T 9 文献 标 识 码 : A 文章 编 号 : 6 4 9 X 2 1 ) 1a一O l -0 1 7 —0 8 ( 0 1 () 0 6 2 0
于 设 备 保 障 人 员在 第 一 时 间 了解 设 备 故
障 , 出 快 速 反 应 以 最短 的 时 间排 除 设 备 做
1 监视 系统 设计 的原则
根 据 二 次 雷 达 在 运 行 和 维 护 中 实 际 需 进 入 获 得 雷 达 运 行 状 态 , 不 能 由非 授 权 更
故 障 非 常 必 要 , 可 以 给 一 线 值 班 首 长 掌 求 , 及 二次 雷 达 在 飞 行 保障 中 的特 殊 性 , 也 以
制 , 中交 通 管 制 对 雷 达 的 依 赖 性 更 是 与 空
日俱 增 , 也 要 求 我 们 对 二 次 雷 达 的 监 视 这
也 要 达 到 实时 , 得 设 备 保 障 人 员 能 在 第 使
《雷达概述》课件 (2)

雷达的未来Байду номын сангаас展
展望雷达技术的未来发展方向和趋势,探讨新型雷达探测技术、全球雷达系统和智能化趋势。
新型雷达探测技术
如超高频雷达、多波束雷达和高分辨率雷达等新技术的研究和应用。
全球雷达系统
构建全球联网的雷达系统,实现全球范围内的目标监测和跟踪。
雷达智能化的趋势
利用人工智能和大数据分析技术,实现雷达系统的智能优化和自主控制。
雷达信号的特点
雷达信号具有脉冲特性和功率特性,能够通过目标的反射或回波信号进行探测和测量。
模拟信号与数字信号
雷达信号可以是模拟信号或数字信号,模拟信号经常需要转换为数字信号进行处理和分析。
基本信号处理算法
包括脉冲压缩、目标检测、距离测量等信号处理算法,用于提取有用的目标信息。
雷达分辨率与探测概率
探索雷达分辨率的概念及其计算方法,了解如何计算雷达的探测概率。
《雷达概述》PPT课件 (2)
探索雷达技术的精髓,从其概念和应用领域入手,了解雷达系统的组成部分 和信号处理等重要环节。
什么是雷达?
雷达是一种用于探测和追踪目标的电磁波探测系统,广泛应用于军事、民用以及天气领域。
雷达的定义
雷达是一种利用电磁波与目标进行相互作用来检测、定位和跟踪目标的探测系统。
雷达的应用领域
雷达分辨率的概念
雷达分辨率是指雷达系统能够分辨两个目标之间的最小距离或空间分辨率。
探测概率的计算
通过利用雷达系统的性能参数和目标特征,可以计算出目标在给定环境中被雷达探测到的概率。
雷达的发展历程与现代雷达技术
追溯雷达的发展历程,了解现代雷达技术的进步与应用。
雷达的发展历程
雷达自20世纪初发展至今,经历了不断的创新和改进,并在军事和民用领域取得了重大突破。
Alenia SSR-M 二次雷达ACP NRP信号流程及异常故障案例分析 莫卓玮
Alenia SSR-M 二次雷达ACP NRP信号流程及异常故障案例分析莫卓玮摘要:本文通过介绍意大利 Alenia SSR-M单脉冲二次雷达ACP NRP的信号流程以及相关电路的分析异常故障案例的分析处理过程,对此会导致整个雷达系统失效的I类故障进行信号流程分析,在发生故障时如何通过故障现象准确定位故障点的位置,如何对故障进行正确处理。
关键词: Alenia;二次雷达;故障分析0 引言意大利ALENIA公司生产的SSR-M型单脉冲二次雷达上世纪九十年代引进中国,广泛分布于各大管制区域,用于空中交通管制系统,承担着监视任务。
SSR-M二次雷达设备由天线部分、切换单元、射频部分、发射部分、接受部分、电源供给部分、控制录取器等七个部分组成,其中ACP NRP作为天线部分传送给雷达最重要的信号,提供方位增量信息以及正北方位基准。
如若异常,将会产生整体角度偏移,使整个雷达系统无法工作,甚至会对ATC系统产生影响。
1 ACP NRP信号流程概述ACP NRP信号由AMDU模块的编码器组件产生,NRP为正北方位信号,每个天线旋转周期产生一个,作为雷达正北方向判断的依据。
ACP为方位增量信号,按照每个周期128个方位进行信号输出后送到ASC机柜进行信号放大处理。
编码器送出的ACP/NRP脉冲信号连接到主板的J1,匹配阻抗为75Ω。
ASC组件中的+5/±12V电源模块为ASC机框各种电路板和编码器提供电源,ASC中的EDR板接收天线ACP和NRP方位数据,并进行滤波,抑制干扰。
然后,经过延迟,以75Ω同轴匹配阻抗和120Ω平衡双绞线匹配阻抗输出,并对ACP和NRP数据进行在线BITE检测。
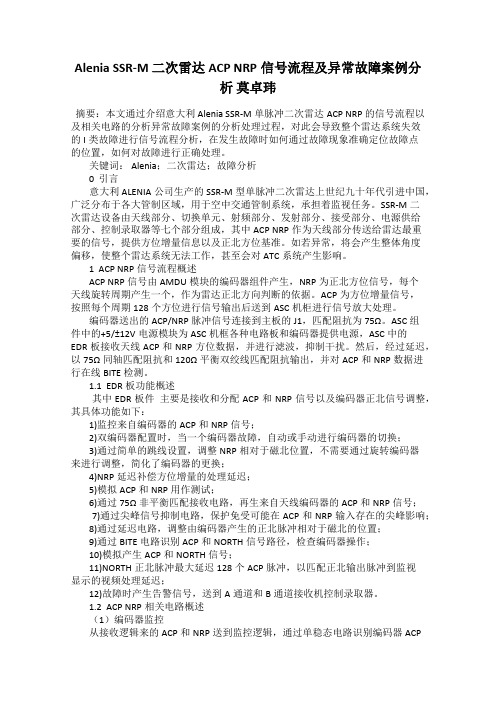
1.1 EDR板功能概述其中EDR板件主要是接收和分配ACP和NRP信号以及编码器正北信号调整,其具体功能如下:1)监控来自编码器的ACP和NRP信号;2)双编码器配置时,当一个编码器故障,自动或手动进行编码器的切换;3)通过简单的跳线设置,调整NRP相对于磁北位置,不需要通过旋转编码器来进行调整,简化了编码器的更换;4)NRP延迟补偿方位增量的处理延迟;5)模拟ACP和NRP用作测试;6)通过75Ω非平衡匹配接收电路,再生来自天线编码器的ACP和NRP信号;7)通过尖峰信号抑制电路,保护免受可能在ACP和NRP输入存在的尖峰影响;8)通过延迟电路,调整由编码器产生的正北脉冲相对于磁北的位置;9)通过BITE电路识别ACP和NORTH信号路径,检查编码器操作;10)模拟产生ACP和NORTH信号;11)NORTH正北脉冲最大延迟128个ACP脉冲,以匹配正北输出脉冲到监视显示的视频处理延迟;12)故障时产生告警信号,送到A通道和B通道接收机控制录取器。
雷达原理课件

雷达原理课件雷达原理课件雷达(Radar)是一种利用电磁波进行探测和测量的技术。
它广泛应用于军事、航空、气象等领域,为我们提供了无可替代的信息和数据。
本文将介绍雷达的原理和应用,并探讨其在现代社会中的重要性。
一、雷达的基本原理雷达的基本原理是利用电磁波的特性来实现目标的探测和测量。
它通过发射一束电磁波,然后接收并分析回波来确定目标的位置、距离、速度等信息。
1. 发射电磁波雷达系统首先发射一束电磁波,通常是微波或无线电波。
这些电磁波会沿着直线传播,并在碰到目标时发生反射或散射。
2. 接收回波当发射的电磁波碰到目标时,它们会发生反射或散射,并返回雷达系统。
雷达接收器会接收到这些回波,并将其转化为电信号。
3. 分析回波接收到的电信号经过处理和分析,可以提取出目标的相关信息。
通过测量回波的时间延迟、频率变化和幅度变化等,雷达系统可以确定目标的位置、距离、速度等参数。
二、雷达的应用领域雷达技术在各个领域都有着广泛的应用,以下是几个常见的领域:1. 军事应用雷达在军事领域中起着至关重要的作用。
它可以用于目标探测、目标跟踪、导航、武器制导等方面。
雷达系统可以帮助军队实时监测敌方的动态,提供战场情报,为作战决策提供重要支持。
2. 航空导航雷达在航空领域中被广泛应用于飞行导航和空中交通管制。
它可以帮助飞行员确定飞机的位置和高度,避免与其他飞行器相撞。
雷达系统还可以监测天气变化,提供飞行安全的重要信息。
3. 气象预报雷达技术在气象领域中扮演着重要角色。
通过测量回波的强度和频率,雷达系统可以提供降水量、风速、云层高度等天气信息。
这对于气象预报和灾害预警非常关键。
4. 海洋勘测雷达在海洋领域中也有着广泛的应用。
它可以用于测量海洋表面的波浪、潮汐和海流等信息。
这对于海洋勘测、海上交通和海洋资源开发具有重要意义。
三、雷达在现代社会中的重要性雷达技术的发展和应用对于现代社会来说具有重要意义。
以下是几个方面的重要性:1. 安全保障雷达系统可以帮助保障国家的安全。
Alenia SIR-M二次雷达28V电压调整模块电路分析及维修

图 4 2 V 直 流稳 压 电 源 电 路 图 8 该 电 路 图按 功 能 细分 成 五 个 部 分 : 流 滤 波 电路 、 整 串联
降低 。 由于 V 一Vc 所 以 V& 小 , 合 管 的 集 电 ., Q q减 复
极 电流 I Q随 之 减 小 , 管 压 降 v 大 , 使 V cl l 故 cQ增 迫 o下 降, 最后 使 输 出 电 压 Vo基 本 维 持 不 变 。 以上 稳 压 过 程 可
来 改 变 误 差 电压 的反 馈值 , 而 调 节 输 出 电压 。 从
保 护 管 Q7的 集 电 极 直 接 接 于 调 整 电 路 Q5的基 极 。 输 出 电 压通 过 R 0 R 9分 压 , R2 2、2 取 O上 的 电 压 给 Q7 极 基
提 供正 向偏 压 R 1为输 出 电流 取 样 电 阻 , 其压 降正 比于 输
*
作者简介 : 陈汉 辉 (9 3)男 , 东 深 圳 人 。工 程 师 。研 究方 向 : 管雷 达设 备 维 护维 修 。 18 一 , 广 航
1
21 0 第 1期 1年
桂 林航 天工业高等 专科 学校学报
陈汉辉/ 文
( 第6 总 1期 ) J UR I O UII O E E O E O P C E HN OG O NA F G IN C l G F A R S A E T C OL Y 。 I
21 0 1年 第 1期 ( 第 6 期) 总 1
桂林 航天 工 业高等 专科 学校 学报
J U N LO UII O L G FA R S A ET C N L G 信 息 与 电 子 工 程 O R A FG LNC L E EO E O P C E H O O Y
ALENIA

合肥 A L E NI A航 管二 次雷 达是 安徽 民航 部 门引 进的第一部国外先进雷达 , 位 于老骆岗机 场跑道 边 , 于 1 9 9 1 年1 0月安装 , 1 9 9 2年 1 2 月 投产 使用 , 在2 0 1 3年 5 月底前 , 承担着合肥骆 岗本场起 降 , 实现低 中高 空覆 盖的任务 , 2 0 1 3年 6 月, 合 肥新桥机 场 的启 用后 , 该 雷 达任务改为合肥 中高空 和上 海高空提供 保 障。根 据我 国 民航设 备使用 规定 , 二 次雷 达 的更 新周 期 为 1 5年 , 目前 , 合 肥这套雷 达 已连 续运行 达 2 3年 , 设 备 内部 电 子元器件老化严 重 , 整体 性 能下 降 , 作用 距 离降低 , 覆 盖范围为 2 0 0 海里( 现今使 用 的航 管二次 雷 达覆 盖范
ALENIA-次雷达低功率告警的分析与处理
ALENIA一次雷达(型号:ATC—33K)设备工作在S波段。
由天线组、发射机(XMTR)、接收机(RCVR)、射频单元、宽带天线共用器和天线启动器/驱动器等单元组成。
采用先进的数据录取、窄带数据传输及自适应技术。
系统工作时,由接收机单元中的控制/录取器产生各种控制信号对系统进行控制,这些信号包括:触发信号、控制信号、数据信号及射频信号等。
1 故障现象雷达接收机面板的低功率告警灯(LDIR PWR 红色灯)亮,输入查看功率指令,液晶数码显示功率偏低(小于60)甚至为0,显示低功率告警,在VD U上观察可发现一次航迹数量较少或为0(与正常情况比较)。
2 分析及解决方法结合设备的日常维护维修经验,经过仔细分析、研究,总结出造成低功率告警的原因,大致有以下几种:(1)功率检测电路。
(2)频率产生及驱动部分。
(3)高压——速调管灯丝工作电压产生电路。
(4)功率放大器件——速调管;以下分别对上述故障原因进行分析、排查解决。
2.1功率检测电路A L EN I A 一次雷达发射机由以下四个机柜组成如图1。
(1)高压机柜:为发射调制器提供三相电源和直流电压。
(2)调制机柜:为速调管提供与RF脉冲同步的稳定高压脉冲。
(3)速调管机柜:对RF信号进行功率放大。
(4)波导机柜:将放大后的RF 信号送到天线。
速调管输出信号被送到波导机柜,在波导机柜中进行功率耦合、衰减、晶体管检波,送到接收机的RXINT板,RXINT板将波导机柜送来的功率信号转换成数字信号后送往VER A计算机。
在此过程中,如果检测头、RXINT板出现问题,都可能造成低功率告警。
检测头中容易故障的部件是二极管检波管,检测头有问题应优先检查检波管,将故障管更换即可。
如果RX IN T板没故障只是存在老化现象,则可以调整此板中的R27电位器(此电位器用于调整差分放大器的偏致电压)。
对于同一功率的信号,通过调整此电位器可以改变在前面板显示的功率数值,从而可以排除因门限问题导致的低功率告警。
浅谈ALENIA二次雷达SIR-M告警原理及其排除
浅谈ALENIA二次雷达SIR-M告警原理及其排除作者:郑和斌来源:《科技视界》 2015年第27期郑和斌(中国民用航空温州空中交通管理站,浙江温州 325024)【摘要】ALENIA 二次雷达在我国使用比较广泛,作为重要部件的SIR-M设备的稳定性在保障民航飞行安全方面非常重要,针对SIR-M的相关故障进行原理分析和提出排除办法。
【关键词】雷达;接收机;△通道;∑通道0引言温州空管站目前使用的是意大利ALENIA公司生产的二次雷达,自从2000年7月开始投入使用以来,由于接近工作年限,雷达设备工作开始不稳定,故障率在逐年提高。
因此,保障雷达设备工作正常,及时排除出现的故障,是日常最重要的工作。
在雷达设备的日常维护中,遇到了不少的问题和故障,对近两年来SIR-M上出现较多的72XX信息告警和71XX信息告警进行了具体的研究和分析,所谓SIR-M的72XX信息告警就是△通道接收告警,而74XX信息告警就是△通道接收告警。
1故障检测的原理雷达设备故障主要通过在线自检电路和开线自检电路进行检测。
在线自检电路利用∑或△通道的增益控制信号来检测∑或△输出信号的大小是否符合要求。
当进行在线自检时,相幅均衡组件J3端的输入信号加到在线自检电路中,该信号与上、下门限进行比较,将比较结果送到告警电路,当告警灯亮,说明J3端的信号处在门限之外,导致错误。
开线自检电路通过连续波经放大器放大后,加到一个中频检波器中。
检波后的视频信号与一门限比较,比较结果经一门电路加到告警电路。
告警电路根据比较结果来决定是否告警,并将该状态传到后续电路中,来控制门电路的开启与否。
272XX信息告警的具体分析和排除参考图1:1)如果71XX信息告警代码(∑通道接收告警)同时存在,则先将∑通道接收告警排除,再进行72XX信息告警故障排除。
由于∑和△通道的告警产生和排除具有一定的相似性,所以在对72XX信息告警代码进行分析和排故后,再简述一下与71XX信息告警代码之间的区别。
ALENIA一次雷达低功率告警的分析与处理
2 分析及 解决方法
仔 细分 析 、 究 , 结 出造 成 低 功 率 告 警 的 研 总 原 因 , 致 有 以 下几 种 : 1功 率 检测 电路 。 大 ()
结 合 设 备 的 日常 维 护 维 修 经 验 , 过 功 分 器 处 理 。 中只 要 任 一 组 件故 障 , 不 常 。 动预 放 大 是 一 块 组 件 , 换 方 便 , 经 其 就 驱 对 排 能 提 供 正 常 的 工 作 频 率 , 过 后 面 滤 波 器 除 故 障 也 比较 容 易 。 经 的 滤 波 处 理 , 没 有 正 常 信 号 送 往 驱 动 预 2. 就 3高 压产生 电路 () 2 频率 产生 及 驱 动 部 分 。3高 压 — 塞调 放 大 电路 , 成 低 功 率 告 警 。 () 造 三相主 电源进入 高压变压 器( HVPS)
信 息 技 术
SIC &T HOOY。 CNE E NLG E C
皿团ቤተ መጻሕፍቲ ባይዱ
ALE I N A一次 雷 达低功 率告 警 的分析 与处 理
李 永 光 ( 中南空管局 广 州 5 4 5 1 0) 0 摘 要 :0 2 世纪9 年代初 , 国民航部 门引进 的意 大:A E I @达 , 0 我  ̄ L N A r 分布在 全 国3 多个机场 , ] 0 为空 中交通 管制发挥重 大作用 。 经过长时 间 较 为稳 定的运行后 , 谈雷达 系统许 多模块 已经老化 , 进入故 障多发期。 中, 功率告警是一次 雷达 比较常见的一 种故障 。 其 低 本文对 引起低 功 率告 警的 几种情况进行分 析 , 并进 行解 决。 关键 词 : 一次雷达 低功率告警 分析 排除 功率检 测 作用距 离 中图 分类 号 :N 5 T 9 文 献标 识码 : A 文 章编 号 :6 2 3 9 (0 20() 0 0-0 1 - 7 12 1)6b一 03 2 7
雷达第三章讲解
空气密度和湿度
– Rain rate
降雨率
– Fog/cloud water content
雾/云的含水量
– Index of refraction
折射率
• Earth’s surface – Surface material (water vs land) – Surface roughness (waves, mountains) – Earth’s curvature
地表 表面物质(水与土地) 表面粗糙度(水波,山)
地球曲率
Atmospheric Attenuation at Sea Level 海平面的大气衰减
Radar power absorbed by water vapor and oxygen 水蒸气和氧气吸收雷达能量
Attenuation is a loss of power characterized by L in radar range equation 雷达距离方程中L代表功率 的衰减
• Atmospheric refraction 大气折射
Interference Basics 干扰的基础
• Two waves can interfere constructively or destructively 两个波可以建设性或破坏性的干扰
• Resulting field strength depends only on relative amplitude 产生的磁场强度只取决于相对振
超折射
的影响
管道 4 / 3地球半径
管道对目标检测的影响
表面无管
发现目标 没有看到目标
表面有 管
管道延伸低空探测范围,但可以 引起在雷达覆盖面的意想不到的孔
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第一章SSR原理1.1航路二次雷达SSR原理基本概念:雷达的原意为无线电检测和测距,他起到对目标定位的作用。
以脉冲雷达为例,通过天线发射射频脉冲。
当射频信号遇到目标以后,其中的一部分能量向雷达站方向反射,通过天线进入接收机。
经过雷达的接收系统放大、检测等处理后,可以发现目标的存在,并可以提取其他的参数信息。
测距是基于光速不变的原理。
由于回波信号往返雷达和目标之间,他将滞后于所发射的探测脉冲时间为Tr。
以探测脉冲作为时间基准,目标和雷达站之间的斜距R为:R = C * Tr / 2由上式可见,对目标的测距(系指斜距)和测时是一致的。
测角,对于监视雷达而言系指方位角 ,亦即偏离正北方向的角度。
一般由扫描天线的主波束的指向所确定,在航管雷达系统中常把工作于上述状态下的雷达称之为一次监视雷达(PSR)。
目前一次雷达主要有三大类:A.航路的监视一次雷达,作用距离在300-500公里B.机场的监视一次雷达,作用距离在100-150公里C.着陆雷达(在跑道附近)。
其信号是提供给塔台调度员的,在塔台显示器上观看飞机下滑的全过程,提供信号仰角7度(上下10度)PSR的优缺点:优点:只要有目标存在就可以发现它(不管敌我)缺点:⑴辐射功率很大(要足够大)R与P的关系:R↔功率的四次方根造价要高得多,设备庞大。
⑵易受干扰(障碍物,气象)⑶不能对目标识别当两个目标很近时也无法区别。
⑷要得到目标的高度也很困难。
二次雷达设备——第1页二次监视雷达(SSR)和一次监视雷达的区别在于工作方式不同。
一次监视雷达可以靠目标对雷达发射的电磁波(射频脉冲)反射,主动发现目标并确定其位置,而二次监视雷达不能靠接收目标反射的自身发射的探测脉冲工作。
他是同地面站(通常称询问机)通过天线的方向性波束发射频率为1030兆赫的一组询问编码(射频脉冲)。
当天线的波束指向装有应答机的飞机的方向时,应答机检测这组询问编码信号,判断编码信号的内容,然后由应答机用1090兆赫的频率发射一组约定的回答编码(射频)脉冲。
回答信号由地面站检测并由录取器处理,由它测量目标的距离、方位、回答编码的内容等,形成目标的点迹报告送到后续设备。
由于完成一次目标的定位是靠两次有源辐射完成的,所以称二次雷达。
监视的含义只表明雷达的功能。
由于二次监视雷达是与机载应答机协同工作,因此他具有一次监视雷达所没有的许多优点:⑴机载应答机的回答频率不同于地面站询问机的询问频率,这样就避免了一次雷达常见的地物杂波和气象杂波的干扰。
⑵由于目标的定位是靠两次有源辐射,同样的探测距离,发射功率比一次监视雷达低的多。
⑶能够利用编码信号交换丰富的信息,特别是采用S模式询问/回答以后可以直接进行数据链通信。
二次监视雷达的工作局限于装有应答机的目标范围之内,在威力范围之内不能发现无应答机的目标。
为了弥补这一缺陷,常将二次雷达和一次雷达配合使用,这样不仅保证没有装应答机的飞机或应答机失灵的飞机的航行管制,同时可以借助一次雷达天线的窄波束改善方位精度和方位分辨力差的二次监视雷达系统。
在一、二次监视雷达联合使用时,二次监视雷达的天线装在一次监视雷达天线的顶部,并与其同步旋转(称为ON-MOUNTED;相反,二次监视雷达独立工作时天线结构称OFF-MOUNTED)。
二次监视雷达的发射信号也与一次监视雷达保持(分频)同步。
他们的回波信号由各自的接收机分别接收,输出信号进行联合录取。
二次雷达设备——第2页1.2询问信号应答信号1.2.1询问信号由地面询问机发射的信号常称为询问信号。
询问信号是以编码形式发射的。
脉冲P1-P3称为模式询问脉冲(简称询问脉冲),他是由天线的询问波瓣辐射。
P1-P3之间的间隔决定每个询问的功能。
国际民航组织规定了六种询问模式,如下表:民用航空规定用模式A和模式C。
脉冲P2称旁瓣抑制脉冲(简称抑制脉冲)。
由天线的控制波瓣辐射。
不论什么询询问时相应的询问模式调制在1030兆赫的载频上,然后通过天线向探测空间定向辐射。
根据使用的要求,可以在每次询问时使用相同的询问模式,也可以在相临的询问中采用不同的询问模式(称模式交替询问)。
1.2.2回答询问当机载应答机收到地面询问机发射的询问信号后,根据询问的内容,自动回答一组编码脉冲,称为回答码。
应答码有16个脉冲组成,码位的代号及时间关系如图2..4所示:二次雷达设备——第3页F1,F2称框架(FRAMING)脉冲或帧脉冲(或称分类脉冲)。
在每次回答时都应出现,以表示一个回答码的存在。
由脚标1,2和4标注的A,B,C,D称数据脉冲,脚标代表数据脉冲的数值,他可以编成4096个独立的应答码。
根据编码的要求在相应的脉冲位置上,可以置逻辑1和逻辑0。
X为备用位,并未使用,恒为逻辑0。
最后一个脉冲SPI是特殊位置指示脉冲。
他距F2位4.35微秒,且在偶而的情况下使用。
回答模式3/A和模式C的信号格式是一样的,但在脚标的数值含义上和译码处理上有所不同。
响应模式3/A询问的回答是识别码,他由4096种不同的回答编码。
数据脉冲分成A、B、C、D四组,他们的脚标代表这组码的数值,根据各数位的存在(由脉冲,逻辑1)和不存在(无脉冲,逻辑0)决定该组数值的大小。
A组数值之和对应识别码的最高值,B组次之,C组为末前位,D组为末位。
应答码有三组代码定义为危急码,不能选作识别码,当地面站收到这三种危急码时,终端处理设备将优先予以处理,并在显示器上闪烁告警,提醒管制员采取应急措施,这三组码为:7700 表示故障危急7600表示飞机通讯系统故障7500表示飞机被劫持当管制员需要进一步辨别回答信号时(如交叉飞行时),由管制员要求领航员发射SPI脉冲。
领航员启动应答机的控制单元发射SPI脉冲后,这个脉冲在模式3/A询问的回答中持续约20秒;即几个天线的旋转周期,然后自动消失。
响应模式C询问的回答是高度码,译码后判决飞机高度的码位续列是按下述排列:D1,D2,D4,A1,A2,A4,B1,B2,B4,C1,C2,C4。
其中,D,A,B,共九位构成标准循环码,按500英尺递增,C共三位形成五周期循环码,按100英尺递增,由于D1代表了最高位,目前民用飞行器尚未达到这个高度,所以民航组织规定D1位恒为逻辑0。
在回答高度码(格雷码)译为BCD码时,其后一位是BCD码是前一位与回答高度码相应位的数值进行异或而得到(即相同为0,相异为1)。
二次雷达设备——第4页例:格雷码:D1D2D4 A1A2A4 B1B2B4 C1C2C40 0 1 1 1 0 1 1 1 0 0 1BCD码:0 0 1 0 1 1 0 1 0十进制数:90高度=十进制数*500英尺+高度修正值-1200=45000-1200=43800计算出来的高度减速去1200英尺即为实际的海拔高度。
又例:回答高度码: 0 0 0 1 0 0 1 1 1 1 0 0 BCD码: 0 0 0 1 1 1 0 1 058*500+400-1200=28200英尺高度码和海拔高度之间的关系,可以从国际民航组织附件10中查到。
由于报告的高度是测量本地高空气压所得到的,因此就必须把机载仪表设备调整到由地面ATC报告的本地地面的气压上,以补偿气压压力的正常改变,得到相对高度。
1.3 二次雷达方程二次雷达设备——第5页和一次雷达不同,二次雷达是靠两次有源辐射(询问机和应答机)完成目标定位。
所以每个辐射源属于单程传输,同样的辐射功率,它比一次雷达作用距离远。
二次雷达方程分成上行(询问)方程和下行(回答)方程。
1.3.1上行方程(UP-LINK)设地面站询问机的发射功率为PI,二次监视雷达天线的询问波瓣的增益为GI,则距地面站询问机天线斜距R处的功率密度为:SI =PI*GI /4πR²上述方程应考虑如下的损耗:1.询问机的发射功率向天线传输过程的损耗L。
它主要包括传输电缆和旋转关节的损耗,约为3.5db(旋转关节损耗0.8db)。
2.天线波束在负3db点之间假定为高斯型波束,由于天线增益不同引起的天线调制损耗La,平均约2db。
对于单脉冲二次监视雷达的垂直大孔径(LVA)天线,它的垂直方向性图在0度高度角增益变化很快。
在计算威力范围时对不同的高度角应使用不同的增益。
如果使用天线罩还要附加0.2db的天线罩引起的损耗。
3.大气吸收衰减Lp。
大气的吸收衰减和大气的密度以及传播的距离有关。
近距离这个损耗可以忽略,低高度角和远距离的吸收衰减较大,考虑到上述衰减后该式变为:SI =PI*GI /4πR²*L*La*Lp 应答机天线截获功率的有效面积为At,则应答机天线接收功率Pt为Pt=At*SI由于At=λ² *Gt/4π,其中Gt为应答机天线增益.将At和SI 代入上式,于是:Pt = PI* GI *Gt*λ² / (4π)²R ² * L * La * Lp二次雷达的距离方程为:λPi* Gi*Gt/rR =*二次雷达设备——第6页4πPt* L*La*Lp当PT最小时得到作用距离Rmax,而PT最小相当于应答机接收机输入端的最小触发电瓶。
当以海里表示最大作用距离时:λPi* Gi*Gt/rRmax=*4π1852 Ptmin* L*La*Lp1.3.2下行方程(DOWN-LINK)用上述同样分析的方法可以得到下行方程用海里表示λtPt* Gi*Gt/rRmax=*4π1852 Pimin* L*La*Lp其中:Pt应答机的发射功率λt应答机的工作过程Pimin询问机接收机输入端的最小触发电平。
通常应当保证上行的最大作用距离和下行最大作用距离相匹配,否则,当上行距离大于下行距离时,本地站收不到被询问的应答机的询问信号,但是应答机的回答会对他所临近的地面站产生异步干扰。
作为航路监视的二次雷达作用距离约为200海里。
二次监视雷达在大气传播过程中由于高度不同气压不同,传播的路径引起折射,这种折射使二次监视雷达信号传播朝向地面弯曲,以至可以收到远距离低于水平面的信号。
异常的传播也可暂时增加雷达的作用距离,如大气的逆温或潮湿空气紧贴海平面都能增加无线电波的折射以致使电波紧贴地球表面传播。
在这种情况下能看到水平面以下距雷达站230海里距离的目标。
1.4 天线特征――询问的旁瓣抑制二次雷达设备——第7页地面站使用的天线有两个基本的波束,询问波束和控制波束。
询问波束具有高增益窄的水平波瓣和低旁瓣的特点。
控制波瓣由较低的峰值增益,他的增益应大于询问波束除主瓣以外所有方向上的增益。
从技术要求可知,询问波束方向性图第一旁瓣电平约为-27dB,平均辐射场强亦可达-33dB左右。
当不存在控制波束时,对于接近地面站的飞机,他的应答被询问波束的旁瓣所触发,在天线扫描过程中,应答机大部分时间处于询问波束的旁瓣的威力范围之内,应答机可能断续或持续回答。