第四节最小相位系统与非最小相位系统
合集下载
第12讲bode最小相位系统和非最小相位系统
(1)对数坐标图 (Bode diagram or logarithmic plot) (2)极坐标图 (Polar plot) (3)对数幅相图 (Log-magnitude versus phase plot)
对数幅频特性 对数频率 特性曲线
相频特性
20log G( j) dB G( j) ()
R(s) + -
E(s)
G(s)
C(s)
假设系统的开环传递函数为
G(s)
K (T1s 1)(T2s 1)(Tms 1) s (T1s 1)(T2s 1)(Tn s 1)
图5-21单位反馈控制系统
G(
j)
(
K (T1 j 1)(T2 j 1)(Tm j j) (T1 j 1)(T2 j 1)(Tn
n
n
时
40 log 40 log1 0 n
dB
所以高频渐近线与低频渐近线在
8
处相交。这个频率就是上述二阶因子的转角频率。
谐振频率谐振峰值
d g() 2(1 2 )(2 ) 2(2 )2 1 0
dt
n2
n2
n n
g ( )
2
2 n
(1
2 n
2
2)2
4
2 (1
2)
G( j)
n
n
L()
20 log
1 2 (
j
1
)
(
j
)2
20log
(1
2 n2
)2
(2
n
)2
n
n
低频渐近线为一条0分贝的水平线
在低频时,即当 n
-20log1=0dB
在高频时,即当 n
最小相位系统非最小相位系统一复杂系统开环传函可
L( ) 20 lg K
( ) 0
L(ω)/dB 20lgK
φ(ω)/(°)
01
ω
01
ω
2. 积分环节 G(s) 1
s
频率特性为
G( j )
1
1
j
e2
j
其幅频特性和相频特性为
A() 1/
奈氏曲线为:
Im
() 90
ω→∞ 0
当 0时,(0) 0;当 1 时,( 1 ) ;当 时,() 。
T
T4
2
不难看出相频特性曲线在半对数坐标系中对于( ω0, -45°)点是斜对称的,这是对数相频特性的一个特点。 当时间常数T变化时,对数幅频特性和对数相频特性的
形状都不变,仅仅是根据转折频率1/T的大小整条曲线
(描点法)
L() 20 lg 1 1 2T 2
20 lg 1 2T 2
() arctgT
L()/dB
0 0.1/T
-10 -20 -30
()/(°) 0°
0.1/T -45°
渐近线 渐近线
1/T
精确曲线
1/T
10/T
10/T
-90°
当ωT=1时, ω=1/T 称为交接频率, 或转 折频率、转角频率。
φ (ω )/(°)
0.1
ω
-90°
3. 微分环节 G(s) s
微分环节的频率特性为
j
G( j ) j e 2
其幅频特性和相频特性为 A( )
奈氏曲线为:
Im ( ) 90
ω→∞
ω=0
0 Re
(第12讲) 最小相位系统和非最小相位系统伯特图求参数

jω
σ
σ
1 1 T T1
1
1
T1
T
图5-18最小相位系统和非最小相位系统的零-极点分布图
对于最小相位系统,其传递函数由单一的幅值曲线唯一确定。 对于非最小相位系统则不是这种情况。
14
第十四页,编辑于星期二:二十二点 四十一分。
相同的幅值特性
非最小相位系统
最小相位系统
图5-19
1 jT 1 jT1 和
1 jT 的相角特性 1 jT1
15
第十五页,编辑于星期二:二十二点 四十一分。
在具有相同幅值特性的系统中,最小相位传递函数(系统)的相角 范围,在所有这类系统中是最小的。任何非最小相位传递函数的相 角范围,都大于最小相位传递函数的相角范围
最小相位系统,幅值特性和相角特性之间具有唯一的对应关 系。
2
2
1
3
24
第二十四页,编辑于星期二:二十二点 四十一 分。
30
G(s) K s(Ts1)
-20dB/dec
20
2
转,角频率为 2 斜率为
10
0
4d 0/B de的c 直线
与,/或其延长线与0分
-10
贝线的交点为 3
-20
由此得到 1KvK -30
2 -40dB/dec
1
3
2
1 T
2 3
K T
20
第二十页,编辑于星期二:二十二点 四十一分。
静态位置误差常数的确定
R(s) + -
E(s)
G(s)
C(s)
假设系统的开环传递函数为
G (s)s K (( T T 1 1 ss 1 1 ))T T (2 (2 ss 1 1 )) (( T T n m ss 1 ) 1 )
σ
σ
1 1 T T1
1
1
T1
T
图5-18最小相位系统和非最小相位系统的零-极点分布图
对于最小相位系统,其传递函数由单一的幅值曲线唯一确定。 对于非最小相位系统则不是这种情况。
14
第十四页,编辑于星期二:二十二点 四十一分。
相同的幅值特性
非最小相位系统
最小相位系统
图5-19
1 jT 1 jT1 和
1 jT 的相角特性 1 jT1
15
第十五页,编辑于星期二:二十二点 四十一分。
在具有相同幅值特性的系统中,最小相位传递函数(系统)的相角 范围,在所有这类系统中是最小的。任何非最小相位传递函数的相 角范围,都大于最小相位传递函数的相角范围
最小相位系统,幅值特性和相角特性之间具有唯一的对应关 系。
2
2
1
3
24
第二十四页,编辑于星期二:二十二点 四十一 分。
30
G(s) K s(Ts1)
-20dB/dec
20
2
转,角频率为 2 斜率为
10
0
4d 0/B de的c 直线
与,/或其延长线与0分
-10
贝线的交点为 3
-20
由此得到 1KvK -30
2 -40dB/dec
1
3
2
1 T
2 3
K T
20
第二十页,编辑于星期二:二十二点 四十一分。
静态位置误差常数的确定
R(s) + -
E(s)
G(s)
C(s)
假设系统的开环传递函数为
G (s)s K (( T T 1 1 ss 1 1 ))T T (2 (2 ss 1 1 )) (( T T n m ss 1 ) 1 )
最小相位系统与非最小相位系统

从传递函数角度看,如果说一个环节的传递函数的极点和零点的实部全都小于或等于零,则称这个环节是最小相位环节.如果传递函数中具有正实部的零点或极点,或有延迟环节,这个环节就是非最小相位环节.
对于闭环系统,如果它的开环传递函数极点或零点的实部小于或等于零,则称它是最小相位系统.如果开环传递函中有正实部的零点或极点,或有延迟环节,则称系统是非最小相位系统.因为若把延迟环节用零点和极点的形式近似表达时(泰勒级数展开),会发现它具有正实部零点.
最小相位系统具有如下性质:
1,最小相位系统传递函数可由其对应的开环对数频率特性唯一确定;反之亦然.
2,最小相位系统的相频特性可由其对应的开环频率特性唯返航一确定;反之亦然.
3,在具有相同幅频特性的系统中,最小相位系统的相角范围最小.
非最小相位系统一词源于对系统频率特性的描述,即在正弦信号的作用下,具有相同幅频特性的系统(或环节),最小相位系统的相位移最小,而非最小相位系统的相位移大于最小相位系统的相位移。
非最小相位系统根轨迹的绘制方法同最小相位系统完全相同。
最小相位系统的幅频特性和相频特性之间存在确定的对应关系。
两个特性中,只要一个被规定,另一个也就可唯一确定。
然而,对非最小相位系统,却不存在这种关系。
非最小相位系统的一类典型情况是包含非最小相位元件的系统或某些局部小回路为不稳定的系统;另一类典型情况为时滞系统。
非最小相位系统的过大的相位滞后使得输出响应变得缓慢。
因此,若控制对象是非最小相位系统,其控制效果特别是快速性一般比较差,而且校正也困难。
较好的解决办法是设法取一些其他信号或增加控制点。
例如在大型锅炉汽包的水位调节中增加一个蒸汽流量的信号,形成所谓的双冲量调节。
4第四节最小相位系统与非最小相位系统

j 5 (w )
1 10T1
1 Wednesday, T1April
01,
2015
1 T2
10 T2
5
最小相位系统和非最小相位系统
在最小相位系统中,对数频率特性的变化趋势和相频特性的 变化趋势是一致的(幅频特性的斜率增加或者减少时,相频特性 的角度也随之增加或者减少),因而由对数幅频特性即可唯一地 确定其相频特性。 伯德证明,对于最小相位系统,对数相频特性在某一频率的 相位角和对数幅频特性之间存在下述关系:
90° 129.3° 173.7°
39.3° 5.1°
5.1° 39.3° 54.9° -5.7° -45° -73°
-96.6° -578.1°
4
最小相位系统和非最小相位系统
L(w )
0 -5 -10 -15 -20
w
1 10T1
1 T1
1 T2
10 T2
180° 135° 90° 45° 0° -45° -90° -135° -180° -225° -270°
Wednesday, April 01, 2015
2
最小相位系统和非最小相位系统
例:有五个系统的传递函数如下。系统的幅频特性相同。
T2 s 1 G1 ( s) = T1s 1 1 - T2 s G2 ( s) = T1s 1 T2 s 1 G3 ( s) = 1 - T1s G4 ( s) = 1 - T2 s 1 - T1s
j (w )
j 3 (w )
j 4 (w )
w
j1 (w )
j 2 (w )
由图可知最小相位系统是指在 具有相同幅频特性的一类系统 中,当w从0变化至∞时,系统 的相角变化范围最小,且变化 的规律与幅频特性的斜率有关 系(如 j1(w) )。而非最小相位系 统的相角变化范围通常比前者 大(如j2(w)、j3(w)、j5(w)); 或者相角变化范围虽不大,但 相角的变化趋势与幅频特性的 变化趋势不一致(如 j4(w) )。
自动控制原理最小相位系统
u1
Gc
(
5.2.1无源校正网络
s ) U2( s ) Ts 1 U1( s ) Ts 1
s 1 T
s 1
T
R2
其中 R2 1
u2
R1 R2
C
T ( R1 R2 )C
低通滤波器
提升低频 衰减高频
5.2.1无源校正网络
1 T
Im
1
j L( )
1 T
1 Re
( )
1 T
1 T
-20 20 lg
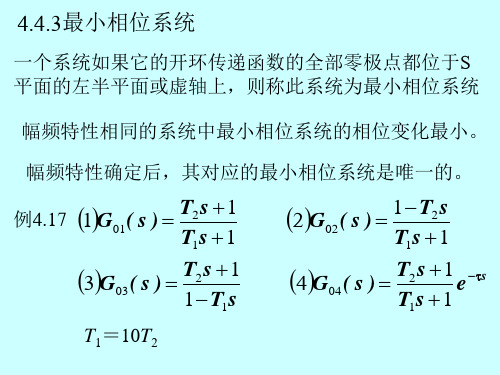
4.4.3最小相位系统
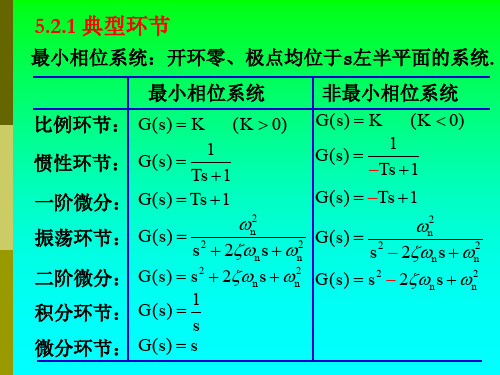
一个系统如果它的开环传递函数的全部零极点都位于S 平面的左半平面或虚轴上,则称此系统为最小相位系统
幅频特性相同的系统中最小相位系统的相位变化最小。
幅频特性确定后,其对应的最小相位系统是唯一的。
例4.17
1G01(
s
)
T2 s T1s
1 1
3G03
(
s
)
T2s 1 1 T1s
T1=10T2
4.4.3最小相位系统
2,对于最小相位系统,其幅频特性和相频特性一一对 应,某频率段的相角主要由该频率段的幅频特性斜率 所决定,也受相邻频段的影响。
-20dB/dec ———— -900 -40dB/dec ———— -1800 -60dB/dec ———— -2700
要使系统稳定,并有足够稳定裕量,应使L(ω)以 -20dB/dec斜率穿越 0dB线,并保持ωc前后有一 定宽度(10倍频程)。
L() L()
4.4.3最小相位系统
-40 -20
c
-40
以-20dB/dec斜率穿越 0dB线,系统稳定。
-20
c -40
Gc
(
5.2.1无源校正网络
s ) U2( s ) Ts 1 U1( s ) Ts 1
s 1 T
s 1
T
R2
其中 R2 1
u2
R1 R2
C
T ( R1 R2 )C
低通滤波器
提升低频 衰减高频
5.2.1无源校正网络
1 T
Im
1
j L( )
1 T
1 Re
( )
1 T
1 T
-20 20 lg
4.4.3最小相位系统
一个系统如果它的开环传递函数的全部零极点都位于S 平面的左半平面或虚轴上,则称此系统为最小相位系统
幅频特性相同的系统中最小相位系统的相位变化最小。
幅频特性确定后,其对应的最小相位系统是唯一的。
例4.17
1G01(
s
)
T2 s T1s
1 1
3G03
(
s
)
T2s 1 1 T1s
T1=10T2
4.4.3最小相位系统
2,对于最小相位系统,其幅频特性和相频特性一一对 应,某频率段的相角主要由该频率段的幅频特性斜率 所决定,也受相邻频段的影响。
-20dB/dec ———— -900 -40dB/dec ———— -1800 -60dB/dec ———— -2700
要使系统稳定,并有足够稳定裕量,应使L(ω)以 -20dB/dec斜率穿越 0dB线,并保持ωc前后有一 定宽度(10倍频程)。
L() L()
4.4.3最小相位系统
-40 -20
c
-40
以-20dB/dec斜率穿越 0dB线,系统稳定。
-20
c -40
5.5最小相位系统与非最小相位系统5.6用频率特性求系统传递函数5.7系统的性能指标

二阶系统的谐振频率为:
r n 1 2 2
1 10T1
1 T1
1 T2
10 T2
180° 135° 90° 45° 0° -45° -90° -135° -180° -225° -270°
j ( )
j 3 ( )
j 4 ( )
j1 ( )
j 2 ( )
由图可知最小相位系统是指在 具有相同幅频特性的一类系统 中,当从0变化至∞时,系统 的相角变化范围最小,且变化 的规律与幅频特性的斜率有关 系(如 j1() )。而非最小相位系 统的相角变化范围通常比前者 大(如j2()、j3()、j5()); 或者相角变化范围虽不大,但 相角的变化趋势与幅频特性的 变化趋势不一致(如 j4() )。
由Bode图确定系统的传递函数
由Bode图确定系统传递函数,与绘制系统Bode图 相反。即由实验测得的Bode图,经过分析和测算,确 定系统所包含的各个典型环节,从而建立起被测系统 的数学模型。 最小相位系统
A sin t
信号源
对象
记录仪
步骤: • 对实验测得的系统对数幅频曲线进行分段处理, 即用斜率为20dB/dec整数倍的直线段来近似测量 到的曲线。 当某处系统对数幅频特性渐近线的斜率发生变化 时,此即为某个环节的交接频率,此环节依据斜 率的变化来确定。 系统最低频率段的斜率由开环积分环节的个数决 定。低频段斜率为-20dB/dec,则系统开环传递函 数有个积分环节,系统为型系统。
•
•
开环增益K的确定
由 =1 作垂线与低频段 ( 或其延长线 ) 的交点的分 贝值=20lgK(dB),由此求出K值。 低频段斜率为 -20dB/dec,低频段 ( 或其延长线 )
第12讲bode最小相位系统和非最小相位系统
() (rad) 57.3 (deg)
传递延时是一种非最小相位特性。如果不采取对消措施,
高频时将造成严重的相位滞后
18
0
-100
-200
-300
-400
-500
-600 10-1
100
101
图5-20传递延迟的相角特性曲线
19
5.2.7 系统类型与对数幅值之间的关系
考虑单位反馈控制系统。静态位置、速度和加速度误差 常数分别描述了0型、1型和2型系统的低频特性。
T
高频时的对数幅频特性曲线是一条斜率为-20分贝/十倍频程的直线
图5-10表示了一阶因子的精确对数幅频特性曲线 及渐近线,以及精确(Exact curve)的相角曲线。
请看下页
7
1
5.2.4 二阶因子 [1 2 ( j /n ) ( j /n )2 ]1 1 2 ( j ) ( j )2
L()
( )
纵坐标均按线性分度
横坐标是角速率 按lg 分度 10倍频程,用dec 3
极坐标图(Polar plot),=幅相频率特性曲线,=幅相曲线 G( j) 可用幅值 G( j) 和相角 () 的向量表示。 当输入信号的频率 0 ~ 变化时,向量 G( j) 的幅值和相位也随之作相应的变化,其端点在复平面上 移动的轨迹称为极坐标图。 奈奎斯特(N.Nyquist)在1932年基于 极坐标图阐述了反馈系统稳定性
作出以分段直线表示的渐近线后,如果需要,再按典 型因子的误差曲线对相应的分段直线进行修正
作相频特性曲线。根据表达式,在低频中频和高频区 域中各选择若干个频率进行计算,然后连成曲线
12
5.2.5最小相位系统与非最小相位系统 Minimum phase systems and non-minimum phase systems 最小相位传递函数
传递延时是一种非最小相位特性。如果不采取对消措施,
高频时将造成严重的相位滞后
18
0
-100
-200
-300
-400
-500
-600 10-1
100
101
图5-20传递延迟的相角特性曲线
19
5.2.7 系统类型与对数幅值之间的关系
考虑单位反馈控制系统。静态位置、速度和加速度误差 常数分别描述了0型、1型和2型系统的低频特性。
T
高频时的对数幅频特性曲线是一条斜率为-20分贝/十倍频程的直线
图5-10表示了一阶因子的精确对数幅频特性曲线 及渐近线,以及精确(Exact curve)的相角曲线。
请看下页
7
1
5.2.4 二阶因子 [1 2 ( j /n ) ( j /n )2 ]1 1 2 ( j ) ( j )2
L()
( )
纵坐标均按线性分度
横坐标是角速率 按lg 分度 10倍频程,用dec 3
极坐标图(Polar plot),=幅相频率特性曲线,=幅相曲线 G( j) 可用幅值 G( j) 和相角 () 的向量表示。 当输入信号的频率 0 ~ 变化时,向量 G( j) 的幅值和相位也随之作相应的变化,其端点在复平面上 移动的轨迹称为极坐标图。 奈奎斯特(N.Nyquist)在1932年基于 极坐标图阐述了反馈系统稳定性
作出以分段直线表示的渐近线后,如果需要,再按典 型因子的误差曲线对相应的分段直线进行修正
作相频特性曲线。根据表达式,在低频中频和高频区 域中各选择若干个频率进行计算,然后连成曲线
12
5.2.5最小相位系统与非最小相位系统 Minimum phase systems and non-minimum phase systems 最小相位传递函数
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
j5 (w)
由图可知最小相位系统是指在 具有相同幅频特性的一类系统 中,当w从0变化至∞时,系统
10
T2 的相角变化范围最小,且变化 的规律与幅频特性的斜率有关 系(如 j1(w) )。而非最小相位系 统的相角变化范围通常比前者
w 大(如j2(w)、j3(w)、j5(w));
或者相角变化范围虽不大,但 相角的变化趋势与幅频特性的
-4.6
-2.3
0
2.3
数幅频特性的斜率。 4.6 u=ln(ww0)
上述公式称为伯德公式。该式说明对于最小相位系统,其幅频特
性与相频特性紧密联系的,当给定了幅频特性,其相频特性也随
之而定,反之亦然。因此,可只根据幅频特性(或只根据相频特
性)对其进行分析或综合;而非最小相位系统则不然,在进行分
析或综合时,必须同时考虑其幅频特性与相频特性。
最小相位系统与非最小相位系统
Sunday, July 12, 2020
1
最小相位系统和非最小相位系统
最小相位系统和非最小相位系统 定义:在右半S平面上既无极点也无零点,同时无纯滞后环节 的系统是最小相位系统,相应的传递函数称为最小相位传递函 数;反之,在右半S平面上具有极点或零点,或有纯滞后环节 的系统是非最小相位系统,相应的传递函数称为非最小相位传 递函数。 在幅频特性相同的一类系统中,最小相位系统的相位移最小, 并且最小相位系统的幅频特性的斜率和相频特性的角度之间具 有内在的关系。
u
e e u
-u
2
2
ln ctgh = ln
2
e - e u
-u
2
2
为加权函数,曲线如图
Sunday, July 12, 2020
6
最小相位系统和非最小相位系统
5 4.8 4.6 4.4
在u=0(w=w0)时
ln
ctgh u 2
;
4.2 4
偏离此点,函数衰减很快。
3.8
3.6 3.4 3.2
在u=±0.69(在w0上下倍频
G1(s)
=
T2s T1s
1 1
j1 (w ) = tg -1T2w - tg -1T1w
G2
(s)
=
1 - T2s T1s 1
j 2 (w ) = -tg -1T2w - tg -1T1w
G3 ( s )
=
T2s 1 1 - T1s
j 3 (w ) = tg -1T2w tg -1T1w
G4
(s)
=
11-
T2s T1s
j 4 (w ) = -tg -1T2w tg -1T1w
G5 ( s )
=
T2s T1s
1 1
e-s
j5 (w ) = tg -1T2w - tg -1T1w - 57.3 w
A1(w) = A2 (w) = A3 (w) = A4 (w) = A5 (w) =
Sunday, July 12, 2020
对最小相位系统:w=0时j (w)=-90°×积分环节个数 ; w=∞时j (w)=-90°×(n-m) 。
不满足上述条件一定不是最小相位系统。 满足上述条件却不一定是最小相位系统。
Sunday, July 12, 2020
2
最小相位系统和非最小相位系统
例:有五个系统的传递函数如下。系统的幅频特性相同。
1 (T2w)2 1 (T1w)2
3
最小相位系统和非最小相位系统
设 T1 = 10T2 , = T2 可计算出下表,其中w = 与 1 的几何中点。
10
/
T1
为对数坐标中
1 T1
T2
w 1/10T1 1/T1 10 / T1 1/T2 10/T2
j1(w) -5.1° -39.3° -54.9° -39.3° -5.1°
7
2
Sunday, July 12, 2020
4
最小相位系统和非最小相位系统
0 L(w)
-5
-10
-15
-20
1
1
10T1
T1
180° j (w )
135° 90°
j3 (w)
45°
0°
-45°
-90° -135°
j 2 (w)
-180°
-225°
-270°
1
1
10T1
T1
Sunday, July 12, 2020
w
1 T2
j 4 (w) j1 (w )
j2(w) -6.3° -50.7° -90° -129.3° -173.7°
j3(w) 6.3° 50.7° 90° 129.3° 173.7°
j4(w) 5.1° 39.3° 54.9° 39.3° 5.1°
j5(w) -5.7° -45° -73° -96.6° -578.1°
Sunday, July 12, 2020
相位角和对数幅频特性之间存在下述关系:
j
(w
0
)
=
1
dA ln ctgh u du
- du
2
式中j0(w)为系统相频特性在观察频率w0处的数值,单位为弧度; u=ln(w/w0)为标准化频率;A=ln|G(jw)|;dA/du为系统相频特性的
斜率,当L(w)的斜率等于20dB/dec时,dA/du =1;函数
3 2.8 2.6 2.4
程处, ln ctgh u = 1.1 ; 2
2.2 2
1.8
在u=±2.3,即在w0上下十
1.6 1.4 1.2
1
倍频程处,ln ctgh u = 0.2 ; 2
0.8 0.6 0.4
即相频特性在w0处的数值
0.2
0
0.01
0.1
1
10
100 ww0 主要决定于在w0附近的对
变化趋势不一致(如 j4(w) )。
1
10
T2
T2
5
最小相位系统和非最小相位系统
在最小相位系统中,对数频率特性的变化趋势和相频特性的
变化趋势是一致的(幅频特性的斜率增加或者减少时,相频特性
的角度也随之增加或者减少),因而由对数幅频特性即可唯一地
确定其相频特性。
伯德证明,对于最小相位系统,对数相频特性在某一频率的
Sunday, July 12, 2020
7
例:已知最小相位系统的渐近幅频特 60
性如图所示,试确定系统的传递函数,50
并写出系统的相频特性表达式。
40
30
解:⒈由于低频段斜率为-20dB/dec所 20
以有一个积分环节;
15 10
ห้องสมุดไป่ตู้
⒉在w=1处,L(w)=15dB,可得
0
-10
20lgK=15,K=5.6
-20
⒊在w=2处,斜率由-20dB/dec变为 -30
-40dB/dec,故有惯性环节1/(s/2+1) -40 -50
⒋在w=7处,斜率由-40dB/dec变为 -60 0.1
-20dB/dec,故有一阶微分环节(s/7+1)
5.6(1 s 1)
G(s) =
7 s( 1 s 1)
2
j (w) = -90 tg-1 w - tg-1 w
由图可知最小相位系统是指在 具有相同幅频特性的一类系统 中,当w从0变化至∞时,系统
10
T2 的相角变化范围最小,且变化 的规律与幅频特性的斜率有关 系(如 j1(w) )。而非最小相位系 统的相角变化范围通常比前者
w 大(如j2(w)、j3(w)、j5(w));
或者相角变化范围虽不大,但 相角的变化趋势与幅频特性的
-4.6
-2.3
0
2.3
数幅频特性的斜率。 4.6 u=ln(ww0)
上述公式称为伯德公式。该式说明对于最小相位系统,其幅频特
性与相频特性紧密联系的,当给定了幅频特性,其相频特性也随
之而定,反之亦然。因此,可只根据幅频特性(或只根据相频特
性)对其进行分析或综合;而非最小相位系统则不然,在进行分
析或综合时,必须同时考虑其幅频特性与相频特性。
最小相位系统与非最小相位系统
Sunday, July 12, 2020
1
最小相位系统和非最小相位系统
最小相位系统和非最小相位系统 定义:在右半S平面上既无极点也无零点,同时无纯滞后环节 的系统是最小相位系统,相应的传递函数称为最小相位传递函 数;反之,在右半S平面上具有极点或零点,或有纯滞后环节 的系统是非最小相位系统,相应的传递函数称为非最小相位传 递函数。 在幅频特性相同的一类系统中,最小相位系统的相位移最小, 并且最小相位系统的幅频特性的斜率和相频特性的角度之间具 有内在的关系。
u
e e u
-u
2
2
ln ctgh = ln
2
e - e u
-u
2
2
为加权函数,曲线如图
Sunday, July 12, 2020
6
最小相位系统和非最小相位系统
5 4.8 4.6 4.4
在u=0(w=w0)时
ln
ctgh u 2
;
4.2 4
偏离此点,函数衰减很快。
3.8
3.6 3.4 3.2
在u=±0.69(在w0上下倍频
G1(s)
=
T2s T1s
1 1
j1 (w ) = tg -1T2w - tg -1T1w
G2
(s)
=
1 - T2s T1s 1
j 2 (w ) = -tg -1T2w - tg -1T1w
G3 ( s )
=
T2s 1 1 - T1s
j 3 (w ) = tg -1T2w tg -1T1w
G4
(s)
=
11-
T2s T1s
j 4 (w ) = -tg -1T2w tg -1T1w
G5 ( s )
=
T2s T1s
1 1
e-s
j5 (w ) = tg -1T2w - tg -1T1w - 57.3 w
A1(w) = A2 (w) = A3 (w) = A4 (w) = A5 (w) =
Sunday, July 12, 2020
对最小相位系统:w=0时j (w)=-90°×积分环节个数 ; w=∞时j (w)=-90°×(n-m) 。
不满足上述条件一定不是最小相位系统。 满足上述条件却不一定是最小相位系统。
Sunday, July 12, 2020
2
最小相位系统和非最小相位系统
例:有五个系统的传递函数如下。系统的幅频特性相同。
1 (T2w)2 1 (T1w)2
3
最小相位系统和非最小相位系统
设 T1 = 10T2 , = T2 可计算出下表,其中w = 与 1 的几何中点。
10
/
T1
为对数坐标中
1 T1
T2
w 1/10T1 1/T1 10 / T1 1/T2 10/T2
j1(w) -5.1° -39.3° -54.9° -39.3° -5.1°
7
2
Sunday, July 12, 2020
4
最小相位系统和非最小相位系统
0 L(w)
-5
-10
-15
-20
1
1
10T1
T1
180° j (w )
135° 90°
j3 (w)
45°
0°
-45°
-90° -135°
j 2 (w)
-180°
-225°
-270°
1
1
10T1
T1
Sunday, July 12, 2020
w
1 T2
j 4 (w) j1 (w )
j2(w) -6.3° -50.7° -90° -129.3° -173.7°
j3(w) 6.3° 50.7° 90° 129.3° 173.7°
j4(w) 5.1° 39.3° 54.9° 39.3° 5.1°
j5(w) -5.7° -45° -73° -96.6° -578.1°
Sunday, July 12, 2020
相位角和对数幅频特性之间存在下述关系:
j
(w
0
)
=
1
dA ln ctgh u du
- du
2
式中j0(w)为系统相频特性在观察频率w0处的数值,单位为弧度; u=ln(w/w0)为标准化频率;A=ln|G(jw)|;dA/du为系统相频特性的
斜率,当L(w)的斜率等于20dB/dec时,dA/du =1;函数
3 2.8 2.6 2.4
程处, ln ctgh u = 1.1 ; 2
2.2 2
1.8
在u=±2.3,即在w0上下十
1.6 1.4 1.2
1
倍频程处,ln ctgh u = 0.2 ; 2
0.8 0.6 0.4
即相频特性在w0处的数值
0.2
0
0.01
0.1
1
10
100 ww0 主要决定于在w0附近的对
变化趋势不一致(如 j4(w) )。
1
10
T2
T2
5
最小相位系统和非最小相位系统
在最小相位系统中,对数频率特性的变化趋势和相频特性的
变化趋势是一致的(幅频特性的斜率增加或者减少时,相频特性
的角度也随之增加或者减少),因而由对数幅频特性即可唯一地
确定其相频特性。
伯德证明,对于最小相位系统,对数相频特性在某一频率的
Sunday, July 12, 2020
7
例:已知最小相位系统的渐近幅频特 60
性如图所示,试确定系统的传递函数,50
并写出系统的相频特性表达式。
40
30
解:⒈由于低频段斜率为-20dB/dec所 20
以有一个积分环节;
15 10
ห้องสมุดไป่ตู้
⒉在w=1处,L(w)=15dB,可得
0
-10
20lgK=15,K=5.6
-20
⒊在w=2处,斜率由-20dB/dec变为 -30
-40dB/dec,故有惯性环节1/(s/2+1) -40 -50
⒋在w=7处,斜率由-40dB/dec变为 -60 0.1
-20dB/dec,故有一阶微分环节(s/7+1)
5.6(1 s 1)
G(s) =
7 s( 1 s 1)
2
j (w) = -90 tg-1 w - tg-1 w