水箱液位串级控制实验
实验三 水箱液位串级控制系统实验
(实验三)水箱液位串级控制系统实验报告班级测控四班学号0800201428 姓名王常玥一、实验目的1.通过实验了解水箱液位串级控制系统组成原理。
2.掌握水箱液位串级控制系统调节器参数的整定与投运方法。
3.了解阶跃扰动分别作用于副对象和主对象时对系统主控制量的影响。
4.掌握液位串级控制系统采用不同控制方案的实现过程。
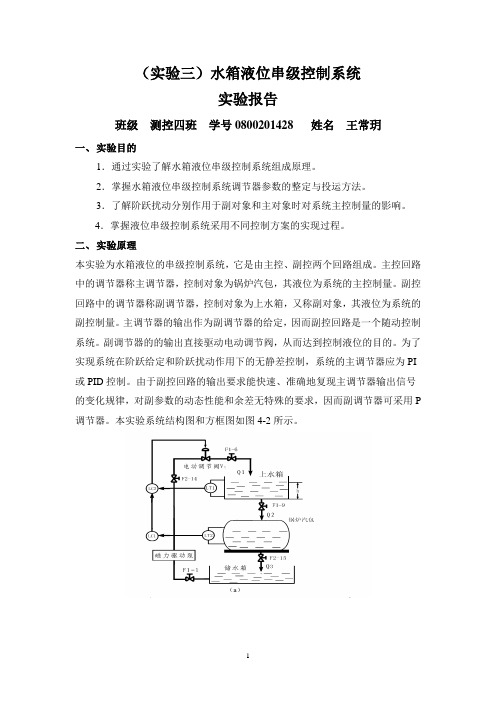
二、实验原理本实验为水箱液位的串级控制系统,它是由主控、副控两个回路组成。
主控回路中的调节器称主调节器,控制对象为锅炉汽包,其液位为系统的主控制量。
副控回路中的调节器称副调节器,控制对象为上水箱,又称副对象,其液位为系统的副控制量。
主调节器的输出作为副调节器的给定,因而副控回路是一个随动控制系统。
副调节器的的输出直接驱动电动调节阀,从而达到控制液位的目的。
为了实现系统在阶跃给定和阶跃扰动作用下的无静差控制,系统的主调节器应为PI 或PID控制。
由于副控回路的输出要求能快速、准确地复现主调节器输出信号的变化规律,对副参数的动态性能和余差无特殊的要求,因而副调节器可采用P 调节器。
本实验系统结构图和方框图如图4-2所示。
图4-2 水箱液位串级控制系统(a)结构图(b)方框图三、实验设备DDD-Z05-I实验对象及DDD-Z05-IK控制屏、DDD-Z05-III 电源控制柜一台、SA-12挂件一个、SA-13A挂件一个、计算机一台、万用表一个、实验连接线若干。
四、实验内容与步骤本实验选择上水箱和锅炉汽包,实验之前先将储水箱中贮足水量,然后将阀门F1-1、F1-6、F2-14全开,F1-9 、F2-15开适当开度(F1-9﹥F2-15),其余阀门均关闭。
1.按照第一章1-6用网线和交换机连接操作员站和服务器,以及服务器和主控单元,“SA31 FM148现场总线远程I/O模块”、“SA31 FWM158现场总线远程I/O模块”挂件挂到屏幕上,并将挂件的通讯线街头插入屏内Profibus-DP总线接口上,将控制屏左侧Profibus-DP总线连接到主控单元DP口,并按照下面的控制屏接线图连接实验系统。
水箱液位串级控制
题目10 水箱液位串级控制一、课程设计主要任务及要求1、通过实验了解水箱液位串级控制系统的结构组成与原理。
2、掌握水箱液位串级控制系统调节器参数的整定与投运方法。
3、了解阶跃扰动分别作用于副对象和主对象时对系统主控制量的影响。
二、实验设备1. THJ-FCS型高级过程控制系统实验装置。
2. 计算机及相关软件。
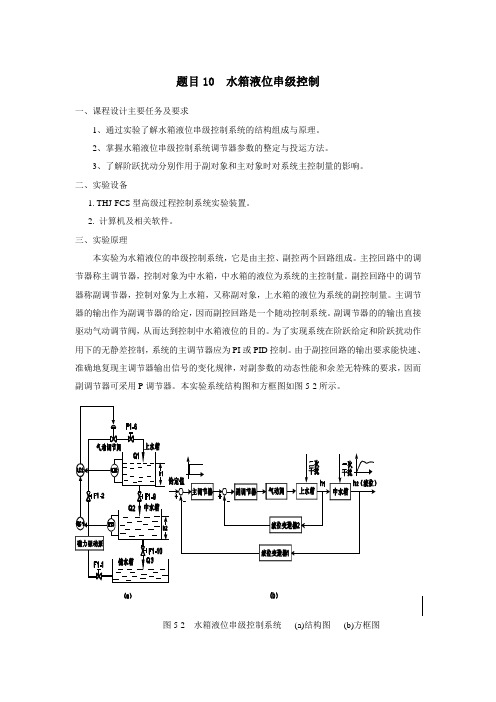
三、实验原理本实验为水箱液位的串级控制系统,它是由主控、副控两个回路组成。
主控回路中的调节器称主调节器,控制对象为中水箱,中水箱的液位为系统的主控制量。
副控回路中的调节器称副调节器,控制对象为上水箱,又称副对象,上水箱的液位为系统的副控制量。
主调节器的输出作为副调节器的给定,因而副控回路是一个随动控制系统。
副调节器的的输出直接驱动气动调节阀,从而达到控制中水箱液位的目的。
为了实现系统在阶跃给定和阶跃扰动作用下的无静差控制,系统的主调节器应为PI或PID控制。
由于副控回路的输出要求能快速、准确地复现主调节器输出信号的变化规律,对副参数的动态性能和余差无特殊的要求,因而副调节器可采用P调节器。
本实验系统结构图和方框图如图5-2所示。
图5-2 水箱液位串级控制系统(a)结构图(b)方框图四、实验控制系统流程图本实验控制系统流程图如图5-3所示。
图5-3 实验控制系统流程图本实验主要涉及三路信号,其中两路是现场测量信号上水箱和中水箱液位,另外一路是控制阀门定位器的控制信号。
上水箱和中水箱液位检测信号LT1和LT2为标准的模拟信号,直接传送到SIEMENS 的模拟量输入模块SM331,SM331和分布式I/O模块ET200M直接相连,ET200M挂接到PROFIBUS-DP总线上,PROFIBUS-DP总线上挂接有控制器CPU315-2 DP(CPU315-2 DP 为PROFIBUS-DP总线上的DP主站),这样就完成了现场测量信号到CPU的传送。
本实验的执行机构为带PROFIBUS-PA通讯接口的阀门定位器,挂接在PROFIBUS-PA 总线上,PROFIBUS-PA总线通过LINK和COUPLER组成的DP链路与PROFIBUS-DP总线交换数据,PROFIBUS-DP总线上挂接有控制器CPU315-2 DP,这样控制器CPU315-2 DP 发出的控制信号就经由PROFIBUS-DP总线到达PROFIBUS-PA总线来控制执行机构气动调节阀。
实验四 下水箱液位和进口流量串级控制实验

实验四下水箱液位和进口流量串级控制实验一、实验目的1、学习闭环串级控制的原理。
2、了解闭环串级控制的特点。
3、掌握闭环串级控制的设计。
4、初步掌握闭环串级控制器参数调整。
二、实验设备A3000-FBS现场系统,百特控制系统。
三、实验要求1、设计串级控制器。
2、经过参数调整,获得最佳的控制效果,并通过干扰来验证。
四、实验内容与步骤1、在现场系统A3000-FBS,将回路2手动调节阀JV201、JV206完全打开,使下水箱闸板具有一定开度,其余阀门关闭。
2、在控制系统A3000-CS上,将百特内给定仪表4~20mA输出端连到百特外给定仪表4~20mA外给定端,百特外给定仪表4~20mA输出端连到调节阀输入端,下水箱液位输出端连到百特内给定仪表4~20mA输入端,支路2流量计输出端连到百特外给定仪表4~20mA输入端。
3、打开A3000-CS电源,百特仪表通电。
打开A3000-FBS电源,调节阀通电。
4、启动计算机组态王软件,运行百特仪表组态程序,登陆进入下水箱液位和进口流量串级控制试验。
首先进行副回路比例调节。
主回路设为手动,副回路设为自动。
SP设为60%,主回路调节器输出设为40%,I为1800,调节P值,使调节阀控制量输出即PV1输出平衡。
获得P值。
5、在A3000-FBS上,启动右边水泵2#开关,给下水箱注水。
6、切换至单主回路控制即把手动改为自动,调节主回路的P、I值待系统稳定后,对系统加扰动信号。
通过反复对副调节器和主调节器参数的调节,使系统具有较满意的动态响应和较高的控制精度。
画下最终的曲线。
7、实验结束后,关闭阀门,关闭水泵。
关闭全部电源设备,拆下实验连接线。
六、实验结果提交1、画出液位流量串级控制实验系统的框图和最终获得的满意响应曲线,以及最佳串级控制参数。
2、阐述实现液位流量串级控制的原理。
实验三上水箱下水箱液位串级控制实验
实验三上水箱下水箱液位串级控制实验一.实验目的1.掌握串级控制系统的基本概念和组成。
2.掌握串级控制系统的投运与参数整定方法。
3.研究阶跃扰动分别作用在副对象和主对象时对系统主被控量的影响。
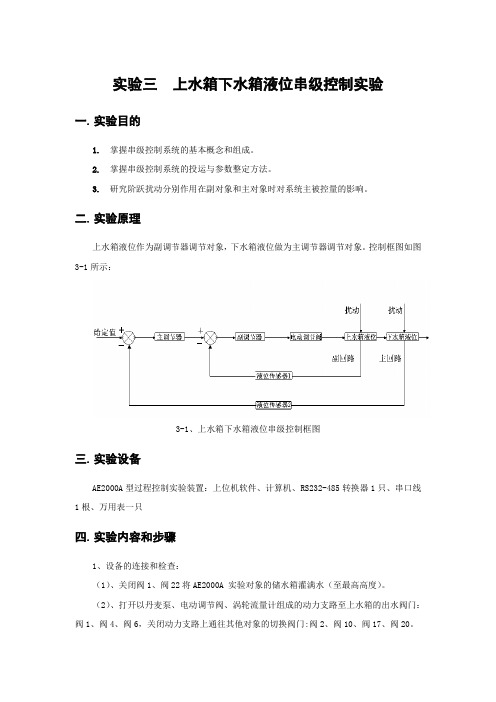
二.实验原理上水箱液位作为副调节器调节对象,下水箱液位做为主调节器调节对象。
控制框图如图3-1所示:3-1、上水箱下水箱液位串级控制框图三.实验设备AE2000A型过程控制实验装置:上位机软件、计算机、RS232-485转换器1只、串口线1根、万用表一只四.实验内容和步骤1、设备的连接和检查:(1)、关闭阀1、阀22将AE2000A 实验对象的储水箱灌满水(至最高高度)。
(2)、打开以丹麦泵、电动调节阀、涡轮流量计组成的动力支路至上水箱的出水阀门:阀1、阀4、阀6,关闭动力支路上通往其他对象的切换阀门:阀2、阀10、阀17、阀20。
(3)、打开上水箱的出水阀:阀8至适当开度。
(4)、检查电源开关是否关闭2、系统连线图:图3-2、实验接线1)、如图5-2所示:将I/O信号接口板上的下水箱液位的钮子开关打到OFF位置,上水箱液位的钮子开关打到ON位置。
2)、将下水箱液位+(正极)接到任意一个智能调节仪的1端(即RSV的+极),下水箱液位-(负端)接到智能调节仪的2端(即RSV的-极)。
智能仪表的地址设为1,软件定义调节仪地址为1的调节器为主调节器,调节仪地址为2的调节器为副调节器。
3)、将主调节仪的4~20mA输出接至I/O信号面板的温度变送器转换电阻上转换成1~5V 电压信号,再将此转换信号接至另一调节仪(副调节器)的1端和2端作为外部给定,上水箱液位信号转换为0.2~1V的信号后接入副调节器的3、2两端。
调节器输出的4~20mA接电动调节阀的4~20mA控制信号两端。
4)、电源控制板上的三相电源、单相Ⅰ的空气开关、单相泵电源开关打在关的位置。
5)、电动调节阀的~220V电源开关打在关的位置。
6)、智能调节仪的~220V电源开关打在关的位置。
实验方案:水箱液位串级控制系统

过程控制综合实验报告实验名称:水箱液位串级控制系统专业:班级:姓名:学号:实验方案一、实验名称:水箱液位串级控制系统二、串级控制系统的概述1、图5-1是串级控制系统的方框图。
该系统有主、副两个控制回路,主、副调节器相串联工作,其中主调节器有自己独立的给定值R,它的输出m1作为副调节器的给定值,副调节器的输出m2控制执行器,以改变主参数C1。
图5-1 串级控制系统方框图R-主参数的给定值;C1-被控的主参数;C2-副参数;f1(t)-作用在主对象上的扰动;f2(t)-作用在副对象上的扰动。
2、串级控制系统的特点串级控制系统及其副回路对系统控制质量的影响已在有关课程中介绍,在此将有关结论再简单归纳一下。
(1).改善了过程的动态特性;(2).能及时克服进入副回路的各种二次扰动,提高了系统抗扰动能力;(3).提高了系统的鲁棒性;(4).具有一定的自适应能力。
3、主、副调节器控制规律的选择在串级控制系统中,主、副调节器所起的作用是不同的。
主调节器起定值控制作用,它的控制任务是使主参数等于给定值(无余差),故一般宜采用PI或PID调节器。
由于副回路是一个随动系统,它的输出要求能快速、准确地复现主调节器输出信号的变化规律,对副参数的动态性能和余差无特殊的要求,因而副调节器可采用P或PI调节器。
4、主、副调节器正、反作用方式的选择正如单回路控制系统设计中所述,要使一个过程控制系统能正常工作,系统必须采用负反馈。
对于串级控制系统来说,主、副调节器的正、反作用方式的选择原则是使整个系统构成负反馈系统,即其主通道各环节放大系数极性乘积必须为正值。
各环节的放大系数极性是这样规定的:当测量值增加,调节器的输出也增加,则调节器的放大系数K c为负(即正作用调节器),反之,K c为正(即反作用调节器);本装置所用电动调节阀的放大系数K v恒为正;当过程的输入增大时,即调节器开大,其输出也增大,则过程的放大系数K0为正,反之K0为负。
液位流量串级控制

水箱液位控制系统的设计摘要:随着现代工业生产过程向着大型、连续方向发展,对控制系统的控制品质提出了日益增长的要求。
在这种情况下,传统的单回路液位控制已经难以满足一些复杂的控制要求,水箱液位控制系统由于控制过程特性呈现大滞后、外界环境的扰动较大,要保持水箱液位最后都保持设定值,用简单的单闭环反馈控制不能实现很好的控制效果,所以采用串级闭环反馈系统。
本设计采用水箱液位和注水流量串级控制,设计系统主要由水箱、管道、三相磁力泵、水压传感器、涡轮流量计、变频器、可编程控制器及其输入输出通道电路等构成。
系统中由液位PID控制器的设定值端口设置液位给定值,水压力传感器检测液位。
涡轮流量计测流量,变频器调节水泵的转速,采用PID算法得出变频器输出值,实现流量的控制。
流量控制是内环,液位控制是外环。
制作相对应的控制画面,让画面的个按钮与变量相对应,对系统的个参数进行整定,通过不断的调试,使系统尽可能的保持在要求的位置。
系统电源由接触器和按钮控制,系统电源接通后PLC进行必要的自检和初始化,控制器接收到系统启动按钮动作信号后,通过接触器接通电机电源,启动动力系统工作,开始两个闭环系统的调节控制。
目录1、设计目的和任务 (1)1.1 目的 (1)1.2 主要任务 (1)2、设计方案提出及选择 (1)2.1 液位单闭环控制系统 (1)2.2 液位流量串级控制系统 (1)3、液位串级控制系统组成结构 (2)3.1 串级控制系统的组成 (2)3.2 系统总貌图 (4)4、设计方案的控制流程图和电气原理图 (4)4.1 水箱液位串级控制系统的结构图设计 (4)4.2 水箱液位串级控制系统框图的设计 (5)4.3 电气原理图的设计 (5)5、系统工作原理 (6)5.1 水箱工作原理 (6)5.2 PID控制工作原理 (7)6、软件流程图及程序的编写 (7)7、上位机画面制作 (9)8、PID参数整定 (10)8.1 串级控制回路系统的优点 (10)8.2 串级控制系统的作用 (10)8.3 监控画面参数的调节 (10)9、结果 (11)1、设计目的和任务1.1 目的利用实验室的多容水箱及其辅助检测设备,并采用PLC作为控制器的硬件,设计一个液位控制系统,使得液位能够尽量保持平稳在设定的范围内通过课程设计,加强对课程的理解与掌握,学会查寻资料、方案比较,以及设计计算及系统调试等环节,初步掌握PLC的硬件设计和软件设计,程序调试等PLC系统的开发过程,进一步提高分析解决实际问题的能力。
CS4000双容水箱液位串级PID控制实验(1~6号实验装置)
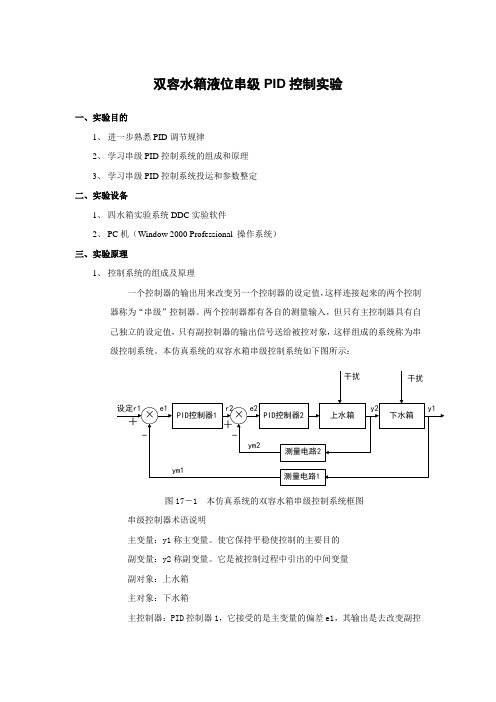
双容水箱液位串级PID控制实验一、实验目的1、进一步熟悉PID调节规律2、学习串级PID控制系统的组成和原理3、学习串级PID控制系统投运和参数整定二、实验设备1、四水箱实验系统DDC实验软件2、PC机(Window 2000 Professional 操作系统)三、实验原理1、控制系统的组成及原理一个控制器的输出用来改变另一个控制器的设定值,这样连接起来的两个控制器称为“串级”控制器。
两个控制器都有各自的测量输入,但只有主控制器具有自己独立的设定值,只有副控制器的输出信号送给被控对象,这样组成的系统称为串级控制系统。
本仿真系统的双容水箱串级控制系统如下图所示:图17-1 本仿真系统的双容水箱串级控制系统框图串级控制器术语说明主变量:y1称主变量。
使它保持平稳使控制的主要目的副变量:y2称副变量。
它是被控制过程中引出的中间变量副对象:上水箱主对象:下水箱主控制器:PID控制器1,它接受的是主变量的偏差e1,其输出是去改变副控制器的设定值副控制器:PID控制器2,它接受的是副变量的偏差e2,其输出去控制阀门副回路:处于串级控制系统内部的,由PID控制器2和上水箱组成的回路主回路:若将副回路看成一个以主控制器输出r2为输入,以副变量y2为输出的等效环节,则串级系统转化为一个单回路,即主回路。
串级控制系统从总体上看,仍然是一个定值控制系统,因此,主变量在干扰作用下的过渡过程和单回路定值控制系统的过渡过程具有相同的品质指标。
但是串级控制系统和单回路系统相比,在结构上从对象中引入一个中间变量(副变量)构成了一个回路,因此具有一系列的特点。
串级控制系统的主要优点有:1)副回路的干扰抑制作用发生在副回路的干扰,在影响主回路之前即可由副控制器加以校正2)主回路响应速度的改善副回路的存在,使副对象的相位滞后对控制系统的影响减小,从而改善了主回路的相应速度3)鲁棒性的增强串级系统对副对象及控制阀特性的变化具有较好的鲁棒性4)副回路控制的作用副回路可以按照主回路的需要对于质量流和能量流实施精确的控制由此可见,串级控制是改善调节过程极为有效的方法,因此得到了广泛的应用。
上水箱液位与进水口流量串级控制实验实验报告
《控制工程实验》实验报告实验题目:上水箱液位与进水口流量串级控制实验课程名称:《控制工程实验》姓名:学号:专业:年级:院、所:日期: 2019.04.18实验三上水箱液位与进水口流量串级控制实验一、实验目的1.通过实验了解水箱液位串级控制系统组成原理。
2.掌握水箱液位串级控制系统调节器参数的整定与投运方法。
3.了解阶跃扰动分别作用于副对象和主对象时对系统主控制量的影响。
4.掌握液位串级控制系统的实现过程。
二、实验设备1. 实验装置对象及控制柜 1套2. 装有Step7、WinCC等软件的计算机 1台3. CP5621专用网卡及MPI通讯线各1个三、实验原理本实验为水箱液位的串级控制系统,它是由主控、副控两个回路组成。
主控回路中的调节器称主调节器,控制对象为下水箱,下水箱的液位为系统的主控制量。
副控回路中的调节器称副调节器,控制对象为中水箱,又称副对象,中水箱的液位为系统的副控制量。
主调节器的输出作为副调节器的给定,因而副控回路是一个随动控制系统。
副调节器的的输出直接驱动电动调节阀,从而达到控制下水箱液位的目的。
为了实现系统在阶跃给定和阶跃扰动作用下的无静差控制,系统的主调节器应为PI或PID控制。
由于副控回路的输出要求能快速、准确地复现主调节器输出信号的变化规律,对副参数的动态性能和余差无特殊的要求,因而副调节器可采用P调节器。
本实验系统结构图和方框图如图1所示。
四、实验内容与步骤本实验选择选择上水箱和中水箱串联作为被控对象。
实验之前先将储水箱中贮足水量,然后将阀门F1-1、F1-7全开,将中水箱出水阀门F1-10开度开到70%左右、下水箱出水阀门F1-11开度50%左右(要求阀F1-10稍大于阀F1-11),其余阀门均关闭。
图1 双容水箱液位串级控制系统(a)结构图 (b)方框图1.用 MPI 通讯电缆线将 S7-300PLC 连接到计算机 CP5621 专用网卡,并按照控制柜接线图连接实验系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第六节水箱液位串级控制实验
一、实验目的
1. 熟悉串级控制系统的结构与特点
2. 掌握串级控制系统的投运与参数的整定方法
3. 研究阶跃扰动分别作用于副对象和主对象时对系统主控制量的影响
二、实验设备
1. THJ-2型高级过程控制系统实验装置
2. 计算机、上位机MCGS组态软件、RS232-485转换器1只、串口线1根
3. 万用表1只
三、实验原理
图6-1 液位串级控制系统的结构图
图6-2 液位串级控制系统的方框图
本实验为水箱液位的串级控制系统,它是由主、副两个回路组成。
每一个回路中都有一个属于自己的调节器和控制对象,即主回路中的调节器称主调节器,控制对象为下水箱,作为系统的被控对象,下水箱的液位为系统的主控制量。
副回路中的调节器称副调节器,控制对象为中水箱,又称副对象,它的输出是一个辅助的控制变量。
本系统控制的目的不仅使系统的输出响应具有良好的动态性能,且在稳态时,系统的被控制量等于给定值,实现无差调节。
当有扰动出现于副回路时,由于主对象的时间常数大于副对象的时间常数,因而当被控制量(下水箱的液位)未作出反映时,副回路已作出快速响应,及时地消除了扰动对被控制量的影响。
此外,如果扰动作用于主对象,由于副回路的存在,使副对象的时间常数大大减小,从而加快了系统的响应速度,改善了动态性能。
图6-1为实验系统的结构图,图6-2为相应控制系统的方框图。
四、实验容与步骤
1.按图6-1要求,完成实验系统的接线。
2.接通总电源和相关仪表的电源。
3.打开阀F1-1、F1-2、F1-7、F1-10、F1-11,且使阀F1-10的开度略大于F1-11。
4.按经验数据预先设置好副调节器的比例度。
5.调节主调节器的比例度,使系统的输出响应出现4:1的衰减度,记下此时的比例度δS和周期TS。
据此,按经验表查得PI的参数对主调节器进行参数整定。
6.手动操作主调节器的输出,以控制电动调节阀支路给中水箱送水的大小,等中、下水箱的液位相对稳定,且下水箱的液位趋于给定值时,把主调节器切换为自动。
7.打开计算机,运行MCGS组态软件,并进行如下的实验:
1)当系统稳定运行后,突加阶跃扰动(将给定量增/减5%~15%),观察并记录系统的输出响应曲线。
2)适量打开阀F2-4,观察并记录阶跃扰动作用于副对象(中水箱)时,系统被控制量(下水箱液位)的响应过程。
3)将阀F2-4关闭,去除副对象的阶跃扰动,且待系统再次稳定后,再适量打开阀F2-5,观察并记录阶跃扰动作用于主对象时对系统被控制量的影响。
8.通过反复对主、副调节器参数的调节,使系统具有较满意的动、静态性能。
用计算机记录此时系统的动态响应曲线。
副P=4 主P=3 I=100000 D=11000
副P=4 I=100000 主P=3 I=100000 D=11000
五、思考题
1.试述串级控制系统为什么对主扰动(二次扰动)具有很强的抗扰能力?如果副对象的时间常数与主对象的时间常数大小接近时,二次扰动对主控制量的影响是否仍很小,为什么?
答:在串级控制系统中,由于引入了一个副回路,不仅能及早克服进入副回路的扰动,而且又能改善过程特性。
副调节器具有“粗调”的作用,主调节器具有“细调”的作用,从而使其控制品质得到进一步提升。
如果副对象的时间常数与主对象的时间常数大小接近时,很有可能发生共振现象,使得副环的工作频率处于谐振频率,其相角接近180°,从而使得副环的增益为负,形成正反馈,出现共振现象,二次扰动对主控变量的影响将会很大。
2.为什么本实验中的副调节器可设置为比例(P)调节器?
答:由于副控回路的输出要求能快速、准确地复现主调节器输出信号的变化规律,对副参数的动态性能和余差无特殊的要求,因而副调节器可采用P调节器。
3.改变副调节器的比例度,对串级控制系统的动态和抗扰动性能有何影响,试从理论上给予说明。
答:在一定围,副控制器P参数增大,副回路输出最大动态偏差增大,振荡和恢复周期更短,振荡更剧烈,使得副控制器的输出更加有利于及时跟踪主控制器的输出,及时调节执行器的输出,从而使得串级控制系统更加有利于及时克服进入副环扰动的影响,提高控制系统的品质,提高抗干扰能力,但P如果过大,会使得副控制器的输出余差增大,导致副控制器很难真实反映主控制器输出的精确性。