3空间一般力系
空间一般力系
Fy = −Fxy cos β = −F cosα cos β n
机械设计基础
§5-2 力对轴的矩
y
平面里的力对点之矩,实际是空间里力对轴之矩。 平面里的力对点之矩,实际是空间里力对轴之矩。
z
r r Mz (F) = Mo (Fxy ) =±Fxy ⋅ h
x
空间的力对轴之矩: 空间的力对轴之矩:
(a)力与轴平行,力对轴的力矩等于零; )力与轴平行,力对轴的力矩等于零; )、(c) (b)、( )力与轴相交,力对轴的力矩等于零; )、( 力与轴相交,力对轴的力矩等于零;
X Y Z 方向: 方向: cosα = , cos β = , cosγ = F F F
机械设计基础
⒍ 注意 力在坐标轴上的投影是代数量; 力在坐标轴上的投影是代数量;而力沿直角坐标轴的分量及 力在坐标平面上的投影是矢量。 力在坐标平面上的投影是矢量。 二、空间汇交力系的合成 ⒈ 几何法 与平面汇交力系的合成方法相同,也可用力多边形方法求 与平面汇交力系的合成方法相同, 合力。 合力。
⒊ 二次投影法(间接投影法) 二次投影法(间接投影法) 当力与各轴正向间夹角不易 确定时, 面上, 确定时,可先将 F 投影到xy 面上,然后再投影到x、y 轴 上。 X =F⋅sinγ ⋅cosϕ=F ⋅cosϕ=F⋅cosθ⋅cosϕ 即:
Y =F⋅sinγ ⋅sinϕ=Fxy ⋅sinϕ=F⋅cosθ⋅sinϕ Z = F ⋅ cosγ = F ⋅ sinθ
Fxy
作用点: 作用点: 物体和力矢的起点或终点 的接触之点。 的接触之点。
机械设计基础
一次投影法(直接投影法) ⒉ 一次投影法(直接投影法) 由图可知: 由图可知: X =F⋅cosα,
第三章空间力系习题解答

3-10如图3-35所示的空间支架。已知:∠CBA=∠BCA=60°,∠EAD=30°,物体的重量为W=3kN,平面ABC是水平的,A、B、C各点均为铰接,杆件自重不计。试求撑杆AB和AC所受的压力FAB和FAC及绳子AD的拉力FT。
图3-35
3-11空间构架由三根直杆铰接而成,如图3-36所示。已知D端所挂重物的重量W=10kN,各杆自重不计。试求杆AD、BD、CD所受的力。
图3-41
3-17曲轴如图3-42所示,在曲柄E处作用一力F=30kN,在曲轴B端作用一力偶M而平衡。力F在垂直于AB轴线的平面内且与铅垂线成夹角a=10°。已知:CDGH平面与水平面间的夹角f=60°,AC=CH=HB=400mm,CD=200mm,DE=EG。不计曲轴自重,试求平衡时力偶矩M之值和轴承的约束反力。
习 题
3-1在边长为a的正六面体上作用有三个力,如图3-26所示,已知:F1=6kN,F2=2kN,F3=4kN。试求各力在三个坐标轴上的投影。
图3-26
3-2如图3-27所示,已知六面体尺寸为400 mm×300 mm×300mm,正面有力F1=100N,中间有力F2=200N,顶面有力偶M=20N·m作用。试求各力及力偶对z轴之矩的和。
图3-36
3-12空间桁架如图3-37所示。力F作用在ABDC平面内,且与铅垂线成45°角,ΔEAK≌ΔFBM,等腰三角形ΔEAK、ΔFBM和ΔNDB在顶点A、B和D处均为直角,又EC=CK=FD=DM。若F=10kN,试求各杆的受力。
图3-37
结点A
结点B
3-13三轮车连同上面的货物共重W=3kN,重力作用点通过C点,尺寸如图3-38所示。试求车子静止时各轮对水平地面的压力。
图3-42
力学第三章空间力系
第三章空间力系二、基本内容1. 基本概念1) 力在空间直角坐标轴的投影(a) 直接投影法:巳知力F 和直角坐标轴夹角a 、丫,则力F 在三个轴上的投 影分别为X = F cos aZ = Feos/(b) 间接投影法(即二次投影法):巳知力F 和夹角八°,则力F 在三个轴上的 投影分别为X = F sin/cos^9Y = F sin/sin 。
Z = F cos/2) 力矩的计算(a) 力对点之矩—、目的和要求能熟练地计算力在空间直角坐标轴上的投影。
熟练掌握力对点之矩与力对轴之矩的计算。
对空间力偶的性质及其作用效应有清晰的理解。
了解空间力系向一点简化的方法,明确空间力系合成的四种结果。
能正确地画出各种常见空间的约束反力。
会应用各种形式的空间力系平衡方程求解简单空间平衡问题。
对平行力系中心和重心应有清晰的概念,能熟练地应用坐标公式求物体 的重心。
1、2、3、4、5、6^ 7、在空间情况下力对点之矩为一个定位矢量,其定义为i j kM0(F) = rx F = x y z = (yZ - zY)i + (zX - xZ)j + (xY - yX)kX Y Zr = xi + yj + zk F = Xi+ Yj + Zk其中尸为力尸作用点的位置矢径(b)力对轴之矩在空间情况下力对轴之矩为一代数量,其大小等于此力在垂直于该轴的平面上的投影对该轴与此平面的交点之矩,其正负号按右手螺旋法则来确定,即M Z(F) = ±F u,h = +2AOAB在直角坐标条下有Mx (乃=yZ-zY M y (F)=zX-xZ M z (F) =xY-yX(c)力矩关系定理力对己知点之矩在通过该点的任意轴上的投影等于同一力对该轴之矩。
在直角坐标系下有Mo(F)^M x(F)i+My(F)j+M2(F)k(d)合力矩定理空间力系的合力对任一点之矩等于力系中各力对同一点之矩的矢量和,即Mo g)二 W, (F)空间力系的合力对任一轴(例如z轴)之矩等于力系中各力对同一轴之矩的代数和,即M z(F R)=ZM z(F)=Z(xY-yX)3)空间力偶及其等效条件(a)力偶矩矢空间力偶对刚体的作用效果决定于三个要素(力偶矩大小、力偶作用面方位及力偶的转向),它可用力偶矩矢肱表示。
空间一般力系
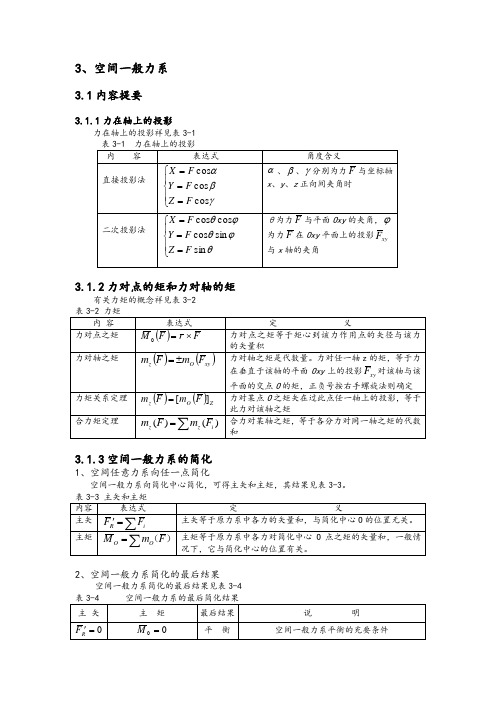
3、空间一般力系3.1内容提要3.1.1力在轴上的投影力在轴上的投影祥见表3-13.1.2力对点的矩和力对轴的矩有关力矩的概念祥见表3-23.1.3空间一般力系的简化1、空间任意力系向任一点简化空间一般力系向简化中心简化,可得主矢和主矩,其结果见表3-3。
2、空间一般力系简化的最后结果空间一般力系简化的最后结果见表3-43.1.4空间一般力系的平衡空间一般力系是力系的最一般形式,其平衡的充要条件是,力系的主矢和对任一点O 的主矩都等于零,即0='R F ,00=M空间力系的平衡方程见表3-5。
3.2解题要点1、 空间一般力系的题型可分为空间力系的简化问题和平衡问题两大类。
物体在空间力系作用下的平衡问题的解题方法和步骤与平面问题基本相同。
但求解空间问题时,要有清晰的空间概念,熟练掌握力在轴上的投影和力对轴之矩。
3、为了简化计算,在选取投影抽与力拒轴时,投影轴要与尽可能多的未知力或其所 在的平面相垂直,力矩轴应与尽可能多的未知力相交或平行.投影轴不一定要彼此垂直, 也不一定要与力矩轴相重合。
在列平衡方程时,可用适当的力矩方程取代投影方程,即 可采用四矩式、五矩式或六矩式的平衡方程,只要所建立的平衡方程是彼此独立的,就能 解出全部未知量。
4.解空间力系平衡问题时,有时采用将该力系向三个相互垂直的坐标平面投影的方 法,将空间力系化为三个平面力系分别求解。
采用此法时,必须注意各力在投影面上投 影的大小、方向及作用点的位置。
3.3范例分析例3-1 图3-1(a)为直角三棱柱。
其上作用力系::F 1=200 N,22F F '==100N ,试求该力系在各轴上的投影及对轴之矩。
图3-1解解题思路: F 1在轴上的投影可按直接投影法计算,对轴之矩可用力对轴之矩的解析式计算;22F F '与组成一个空间力偶矩矢M 1=F 2×0.2=20N ·m ,如图(b )所示,对轴之矩直接投影即可。
空间力系

第三章 空间力系一、空间汇交力系(一)空间汇交力系的合成 1.空间力在坐标轴上的投影 (1)一次投影法如图3-1所示,若已知力F 与三个坐标轴x,y,z 间的夹角分别为θ、β和γ,则力F 在三个坐标轴上的投影分别为⎪⎭⎪⎬⎫===γβθcos cos cos z y x F F F (3.1)图3-1相应的,若已知力F 的三个投影,可以求出力F 的大小和方向,即大小为 222z y x F F F F ++=(3.2)方向 ⎪⎪⎪⎭⎪⎪⎪⎬⎫===F FF F F F z yx γβθcos cos cos(3.3)(2)二次投影法如图3-2所示,若已知力F 与坐标轴Oxy 的仰角γ以及力F 在Oxy 平面上的投影xy F 与x 轴间的夹角ϕ,则力F 在三个坐标轴上的投影分别为γϕλϕγsin sin in cos in F F Fs F Fs F z y x ===,,图3-22.合力投影定理 合力在某轴上的投影,等于各分力在同一坐标轴上投影的代数和。
即∑=+++=xixn x x Rx FF F F F 21 同理 ∑∑==ziRz yi RyF F F F ,3.空间共点力系的合成空间共点力系可以合成为一个合力,该合力的作用线通过力系的公共作用点,合力的大小和方向为()()()222∑∑∑++=zyxR F F F F (3.4)()()()⎪⎪⎪⎭⎪⎪⎪⎬⎫===∑∑∑R z R R yRR xRF F F F F F k F j F i F ,cos ,cos ,cos(3.5)(二)空间汇交力系的平衡 1.空间汇交力系的平衡条件空间汇交力系平衡的充要条件是合力等于零,即()()()0222=++=∑∑∑zyxR F F F F2.空间汇交力系的平衡方程根据平衡条件,得到空间汇交力系的平衡方程为⎪⎪⎭⎪⎪⎬⎫===∑∑∑000y x zFFF(3.6)利用上述三个方程,可以求解3个未知量。
02第二讲:刚体的平衡方程

n
n
FR = ( ∑ Fx ) 2 + ( ∑ Fy ) 2 + ( ∑ Fz ) 2
M O = (∑ M Ox )2 +(∑ M Oy )2 +(∑ M Oz )2
空间任意力系平衡的充分必要条件: 空间任意力系平衡的充分必要条件:
∑ MOx (F ) = 0 ∑ M x (F ) = 0 ∑ Fx = 0 FR = 0 ⇔ ∑ Fy = 0 MO = 0 ⇔ ∑ MOy (F ) = 0 = ∑ M y (F ) = 0, MOz (F ) = 0 ∑ M z (F ) = 0 ∑ ∑ Fz = 0 10
平面任意力系平衡的充分必要条件: 平面任意力系平衡的充分必要条件:
y
一矩式
O
x
∑F = 0 x ∑MA(F) = 0 ∑MB(F) = 0
∑ Fx = 0 ∑ Fy = 0 ∑ M O ( F ) = 0
二矩式
三矩式
∑MA(F) = 0 ∑MB(F) = 0 ∑MC (F) = 0
– 力系中各力的大小、方向、作用点、力系的简化点A。 力系中各力的大小、方向、作用点、力系的简化点 。
• 输出结果
– 力系的主矢(大小和方向或用分量表示) 力系的主矢(大小和方向或用分量表示) – 力系对 点的主矩(大小和方向或用分量表示) 力系对A点的主矩(大小和方向或用分量表示) 点的主矩 – 力系简化的最简结果
FAy F A x
A
B
W
F B
∑ Fx = 0 C ∑ Fy = 0 W ∑ M O ( F ) = 0
讨论: 讨论: 二矩式和三 矩式的应用
第3章-平面与空间一般力系

故求土压力 FR使墙倾覆的力矩,就是求 FR
对A点的力矩。由已知尺寸求力臂d不方便,但如果将
FR分解为两分力 F1 和 F2
M A (FR ) M A (F1) M A (F2 )
F1h / 3 F2b
,
=FR cos 30
=150kN 3
1h3.5m -F1R50siknN301h1.5m
注意:主矢与简化中心位置无关,主矩则有关。因此说
到力系的主矩时,必须指出是力系对于哪一点的主矩。
主矢的解析表达法
R RX 2 RY 2
RX X1 X 2 X n X1 X 2 X n X
同理: RY Y
R X 2 Y 2
Tan RY Y RX X
M0=∑M0=M0(F1)+M0(F2)+…M0(Fn)=∑M0(F)
又B处的支座反力垂直于支持面,要形成与已知力偶M反向的 力偶,B处的支座反力 FB 方向只能斜向上,A处的支座反力
FA 的方向斜向下,作用线与 FB 平行,且有 FA FB
n
由平衡条件 Mi 0 ,得: i 1
FB d M 0
30°
FB (4m sin 30 ) 20MkN m 0
n
Mi 0
i 1
【例题3-3】 如图3-10(a)所示的简支梁AB,受一力偶的作用。
已知力偶 M 20kN m ,梁长l 4m ,梁的自重不计。 求梁A、B支座处的反力。
30°
M
A B
4m
60°
d
M
A FA
B FB 4m
【解】 取梁AB为研究对象,梁AB上作用一集中力偶M且保持 平衡,由于力偶只能用力偶来平衡,则A、B处的支座反力必形 成一对与已知力偶M反向的力偶
空间力系的平衡方程式及其应用

即与各坐标轴相交。因此各力对坐标轴的矩均为零,即式(3-17)中,
M x (F ) 0 , M y (F ) 0, M z (F ) 0 。于是,空间汇交力系的平衡方程
只有三个,即
Fx 0
Fy
0
Fz
0
(3-18)
(2)空间平行力系
若取z轴平行于力系中各力的作用线,则 Oxy 坐标面与各力作用线
衡的必要与充分条件是:力系的主矢和力系对于任意点的主矩矢
都等于零。即
FR 0
MO 0
根据式(3-14)和式(3-16),上述条件可写成
空间任意力系平衡的必要与充分条 件是:力系中各力在任一直角坐标 系中每一轴上的投影的代数和等于 零,以及各力对每一轴的矩的代数 和也等于零。
Fx 0
Fy 0
式中,负号表明 FB ,FC 的实际方向与假设相反,即两杆均受压力。
例3-4
O1 和 O2 圆盘与水平轴 AB 固连,O1 盘垂直于z轴,O2 盘垂直于x轴,
力的矢量和。
即
FR F1 F2 Fn Fi (3-11)
图3-9
附加力偶系可合成为一个空间力偶,其力偶矩 MO,等于各附加力
偶矩的矢量和,亦即等于原力系中各力对于简化中心O的矩的矢量和。
MO MO (F1) MO (F2 ) MO (Fn ) MO (Fi )
F称R 为原力系的主矢,称为原力系对简化中心O的主矩矢 M。O
Fz 0
M
x
(F
)
0
M y (F ) 0
M
z
(F
)
0
(3-17)
空间任意力系是物体受力的最一般情况,其他类型的力系都可 以认为是空间任意力系的特殊情形,因而它们的平衡方程也可 由方程式(3-17)导出,具体如下。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3、空间一般力系内容提要力在轴上的投影力在轴上的投影祥见表3-1表3-1 力在轴上的投影力对点的矩和力对轴的矩有关力矩的概念祥见表3-2空间一般力系的简化1、空间任意力系向任一点简化空间一般力系向简化中心简化,可得主矢和主矩,其结果见表3-3。
2、空间一般力系简化的最后结果空间一般力系简化的最后结果见表3-4空间一般力系的平衡空间一般力系是力系的最一般形式,其平衡的充要条件是,力系的主矢和对任一点O 的主矩都等于零,即0='R F ,00=M空间力系的平衡方程见表3-5。
解题要点1、 空间一般力系的题型可分为空间力系的简化问题和平衡问题两大类。
物体在空间力系作用下的平衡问题的解题方法和步骤与平面问题基本相同。
但求解空间问题时,要有清晰的空间概念,熟练掌握力在轴上的投影和力对轴之矩。
3、为了简化计算,在选取投影抽与力拒轴时,投影轴要与尽可能多的未知力或其所 在的平面相垂直,力矩轴应与尽可能多的未知力相交或平行.投影轴不一定要彼此垂直, 也不一定要与力矩轴相重合。
在列平衡方程时,可用适当的力矩方程取代投影方程,即 可采用四矩式、五矩式或六矩式的平衡方程,只要所建立的平衡方程是彼此独立的,就能 解出全部未知量。
4.解空间力系平衡问题时,有时采用将该力系向三个相互垂直的坐标平面投影的方 法,将空间力系化为三个平面力系分别求解。
采用此法时,必须注意各力在投影面上投 影的大小、方向及作用点的位置。
范例分析例3-1 图3-1(a)为直角三棱柱。
其上作用力系::F 1=200 N,22F F '==100N ,试求该力系在各轴上的投影及对轴之矩。
图3-1解解题思路: F 1在轴上的投影可按直接投影法计算,对轴之矩可用力对轴之矩的解析式计算;22F F '与组成一个空间力偶矩矢M 1=F 2×=20N ·m ,如图(b )所示,对轴之矩直接投影即可。
)N ( 28.742922004.03.02.02.02221=⨯=++=F F x)N ( 56.1482942002941=⨯==F F y)N ( 41.1112932002931-=⨯-=-=F F z)m N ( 56.44041.1114.0)(⋅-=-⨯-=-=y z x zF yF M)m N ( 28.341241.1112.053)(1⋅=+⨯=+-=M xF zF M z x y 154)(M yF xF M x y z +-=)m N ( 161628.44.056.1482.0⋅=+⨯-⨯=7例3-2均质矩形板ABCD 重P=200 N ,作用在其对角线交点上,矩形板用球形铰链A 和蝶形铰链B 固定在墙上,并用绳子CE 维持在水平位置如图3-2(a )所示,若α=30°,试求绳子的拉力以及铰链A,B 的反力。
图3-2解解题思路:取矩形板为研究对象,空间球形铰链A 的约束反力可用三个互相垂直的分力来表示。
而蝶形铰链轴向的约束反力和垂直于轴向的约束力偶可以忽略,故约束反力的作用线在垂直于铰链轴的平面内。
作用在板上的力组成一个空间任意力系,它有六个平衡方程,可求解六个未知力。
(1)取矩形板为研究对象,受力图如图(b )所示。
为便于计算绳子拉力F 对x ,y 轴之矩,可将力F 分解成平行于z 轴的分力F z =F sin30°,与在板平面内的分力F xy =F cos30°。
(2)建立空间任意力系的平衡方程:0)(=∑F m z , 0=Bx F (1) 0)(=∑F m y ,030sin 21=⋅︒-⨯BC F BC P (2) N F 200=0)(=∑F m x ,030sin 21=⋅︒+⨯-⋅CD F AB P AB F Bz (3)0=Bz F0=∑X ,060cos 30cos =︒⋅︒-+F F F Bx Ax (4)N 6.86=Ax F0=∑Y , 030cos 30cos =︒⋅︒-F F Ay (5)N 150=Ay F0=∑Z , 030sin =︒+-+F P F F Bz Az (6)N 100=Az F[讨论]空间力系的平衡方程建立次序可以随意,一般,首先建立的是不用解联立方程的力矩平衡方程。
应尽可能使一个方程包含一个未知量,使未知量从方程中直接解出。
最后还可以用非独立的平衡方程来校核所得约束力。
如对DB 线用0=∑DB M 平衡方程来校核力F ,F Az 的例3-3 图3-3(a )所示电杆OD 高7m ,D 处受水平力F =10kN 作用。
O 处视为球铰支座,A 处以钢索AB 、AC 与地面相连,略去电杆自重。
试求钢索拉力及支座反力。
解:解题思路:电杆OD 受已知力F 、钢索的拉力F 1与F 2以及球铰支座O 处的反力F Ox 、F Oy 、F Oz 作用,计有5个未知量,可由空间一般力系平衡方程的基本形式求解。
OD 杆的受力如图(b )所示。
对图示坐标系,列平衡方程图3-30=∑X , 0sin 45cos sin 45cos 21=+︒-︒Ox F a F a F (1)0=∑Y , 0cos 45cos cos 45cos 21=+︒+︒+-Oy F a F a F F (2)0=∑Z , 045cos 45cos 21=︒-︒-F F F Oz (3) 0)(=∑F m x , 0445sin 445sin 721=⋅︒-⋅︒-⋅F F F (4)0)(=∑F m y 0345sin 345sin 21=⋅︒-⋅︒F F (5)由图示几何关系知:53sin =a ,54cos =a 联立求解上述5个平衡方程,可得kN 37.1221==F F ,F Ox =0,F Oy =–4 kN ,F Oz = kN其中,负号表示约束反力的实际方向与假设的方向相反。
讨论 为了避免解联立方程组,如何合理选取力矩轴理论依据是当力与轴相交或平行时,力对该轴之矩等于零。
首先,欲使力矩平衡方程中不出现F 1及F 2 ,可过F 1、F 2交点A 作x '及y '轴(图b ),此时力F 、F Oy 、F Oz 与y '轴共面,则这些力对y '轴之矩为零。
故应以y '轴为矩轴。
0)(=∑'F m y ,05=⋅-Ox F得0=Ox F同理,应以x '轴为矩轴列为矩平衡方程。
由于已求出00=X ,在下面建立平衡方程时,可不再考虑。
由0)(=∑'F m x ,052=⋅-⋅Oy F F得kN 452-=-=F F Oy其次以F 1、F 2的交线BC 为矩轴,即0)(=∑F m BC ,047=⋅-⋅Oz F F得kN 5.1747==F F Oz 最后,求F 1及F 2 。
分别以OC 及OB 为力矩轴,列出力矩平衡方程0)(=∑F m OC , 0)290cos(225sin 71=-︒⋅⋅+⋅-a F a F 0)(=∑F m OB , 0)290cos(225sin 72=-︒⋅⋅-⋅a F a F 可解出αααcos 257)290cos(225sin 721F F F F ⋅=-==kN 37.12542570==应注意到,在上式的力矩计算中,应用了力矩关系定理。
例如,当求)(1F m OC 时,是将力1F 对O 点之矩先表示为矩矢)(10F m ,再投影到OC 轴上。
在本例中还可应用对CG 及BE 轴的力矩平衡方程,以求解F 1及F 2 。
综上述可知,由于合理地选取了力矩轴,并以力矩方程代替了投影方程,使得每个未知量都可由一个平衡方程单独解出来。
既避免了解联立方程组,又可避免由于数值计算而产生误差的传播。
例3-4 在铅垂轴AB 上有一个水平圆盘。
A 点为向心轴承,B 点为止推轴承。
盘上C 点有力F 作用,在转轴上绕有一软绳,绳的一端悬挂有重物P ,如图3-4(a )所示。
已知:P=100KN ,r 1=,r 2=, a=1m ,α=30°,β=60°.试求平衡时力F 及轴承反力。
解解题思路:先对z 轴取矩,列平衡方程,求出力F ,然后再求出A 及B 处的反力。
图3-4(1)选取AB 物体为研究对象,A 点具有两个方向的轴向约束,B 点具有三个方 向的轴向约束,将传动轴上软绳分割。
显然,分割后绳子的拉力为P 值。
物体的受力图见图(b),为方便地建立平衡方程,可将力F 分解成三个轴向的分力,按二次投影法,可得各分力大小为:F x =Fcos60°cos30°,F y =Fcos 260°,F y =Fsin60°。
在作力F 的二次投影时,可以作辅助图(c )来表示。
(2)按尽可能避免求解联立方程的原则建立方程:∑=0)(F m z, 060cos 21=︒-⋅r F rP得 F=80kN∑=0)(F mX, 030cos 232=︒-++-z y Ay F r aF aP aF得 F A y =63﹒3kN∑=0)(F m Y , 030sin 32=︒++z x Ax F r aF aF 得 F Ax =–17﹒3kN ∑=0X , 0=++x Bx Ax F F F 得: F Bx =–17﹒3kN ∑=0Y , 0=--+y By Ay F P F F 得 F By =56﹒7kN∑=0Z , 0=-z Bz F F 得 F Bz =69﹒3kN讨论:对空间一般力系的平衡问题,可先将空间力沿三个坐标轴方向分解,然后再列平衡方程求解,较为方便。
例3-5边长为a 的等边三角形板ABC 用三根铅直杆1、2、3和三根与水平面各成30°角的斜杆4、5、6支撑在水平位置。
在板的平面内作用有力偶M ,如图3-5(a)所示。
板和各杆的自重不计,求各杆的内力。
图3-5解:解题思路:因支撑三角板的杆都是二力杆,故用截面法将各杆截开,取三角板为研究对象,受力如图(b )所示。
它们构成空间一般力系,有六个未知量,可用空间一般力系平衡方程式求解。
下面分别用三种方法求解。
[方法一]用空间力系一般形式的平衡方程式求解。
坐标系Dxyz 如图(b )所示。
0)(=∑F M z ,030cos 30cos 5=+︒⋅︒M a F (1) 得 a Ma M F 3430cos 25-=︒-= 0=∑Y ,030cos 30cos 30cos 30cos 54=︒︒-︒︒F F (2) 得 aM F F 3454-== 0=∑X ,030sin 30cos 30sin 30cos 30cos 546=︒︒-︒︒-︒F F F (3)得 aMF F F 3430sin )(546-=︒+= 0)(=∑F M x ,030cos 30sin 30cos 42=︒⋅︒-︒-a F a F得 aMF F 3230sin 42=︒-= (4) 0)(=∑F M y ,030sin 30sin 30sin 30sin 5423=⋅︒-︒⋅︒-︒--a F a F a F a F (5) 得 aMF F F F 3230sin )30sin (5423=︒-︒--= 0=∑Z ,030sin 30sin 30sin 654321=︒-︒-︒----F F F F F F (6)得aMF F F F F F 3230sin )(654321=︒++---= 上述求得的结果为各杆内力的大小。