第三章—空间力系
03第三章 空间力系
m (F) = m (F ) z O xy = m (F ) +m (F ) O x O y
即
m (F) = xY − yX z
同理可得其余两式,即有:
m (F) = yZ − zY x my (F) = zX − xZ m (F) = xY − yX z
力对轴的矩的解析式
三、力对点的矩与力对通过该点的轴之矩的关系 ⒈ 定理 力对点的矩矢在通过该点的 任意轴上的投影等于这力对于该 轴的矩。 轴的矩。这就是力对点之矩与对 通过该点轴之矩的关系。 通过该点轴之矩的关系。 ⒉ 证明
第3章 章 空 间 力 系
本章重点、 本章重点、难点
⒈重点
力在空间直角坐标轴上的投影和力对轴之矩。 力在空间直角坐标轴上的投影和力对轴之矩。 空间力系平衡方程的应用。 空间力系平衡方程的应用。 常见的空间约束及约束反力。 常见的空间约束及约束反力。
⒉难点
空间矢量的运算, 空间矢量的运算,空间结构的几何关系与立体 图。
四、空间力偶系的合成与平衡 ⒈ 合成 由于空间力偶系各力偶是自由矢量,只要不改变各分力偶 矩矢方向,将它们都滑移至某汇交点,它们的合成符合矢量合 成法则。 即:合力偶矩 = 分力偶矩的矢量和。
n i= 1
即: m = m +m +m +L m = ∑m + n 1 2 3 i
2 2 大小: m = mx ห้องสมุดไป่ตู้m2 +mz ; y
四、力对点的矩的解析求法 又由于
m (F) = r ×F O =[m (F)]xi +[m (F)]y j +[m (F)]z k O O O
=mx (F)i +my (F) j+mz (F)k
第三章空间力系

Part B 空间力系的简化
[解 ]
F1=F2=F3=F4=F5=F=100N
′ FR =
′ ′ ′ (FRx )2 + (FRy )2 + (FRz )2
=
(16.3)2 + (199.2)2 + (157.7 )2
= 254.6N
′ FRx 16.3 cosα = = = 0.0640 α = 86.33° ′ FR 254.6
M O (Fxy ) = Fxy d
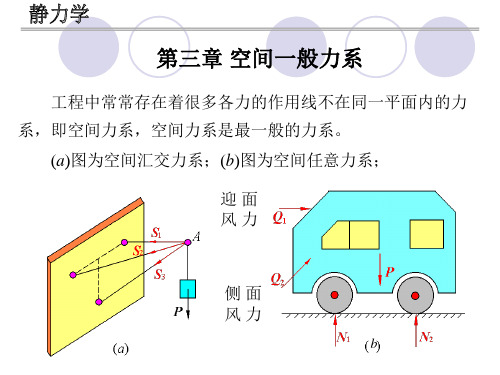
Part A 空间力系的基本概念
合力矩定理
任意一个力系的合力对于任意一点(任意的轴) 任意一个力系的合力对于任意一点(任意的轴)的矩等于力 系中各力对同一点(或轴)的力矩的矢量和(或代数和). 系中各力对同一点(或轴)的力矩的矢量和(或代数和).
Mo (FR ) = Mo (F1) + Mo (F2 ) + ...... + Mo (Fn )
[解 ]
F1=F2=F3=F4=F5=F=100N
′ FRx = ∑ Fix
=− 2 2 2a a F2 − F3 + F4 + F5 2 2 3a 2a = 0.163F = 16.3N
′ FRy = ∑ Fiy
2 2 2a a F2 + F3 + F5 2 2 3a 2a = 1.992 F = 199.2N a ′ FRz = ∑ Fiz = F1 + F5 = 1.577 F = 157.7N 3a =
z MO M2 M1 O Mn F'R
主矢 F’R
′ FR = F′+ F2′ +...... + Fi′+ Fn′ = ∑Fi′ 1
力学第三章空间力系
第三章空间力系二、基本内容1. 基本概念1) 力在空间直角坐标轴的投影(a) 直接投影法:巳知力F 和直角坐标轴夹角a 、丫,则力F 在三个轴上的投 影分别为X = F cos aZ = Feos/(b) 间接投影法(即二次投影法):巳知力F 和夹角八°,则力F 在三个轴上的 投影分别为X = F sin/cos^9Y = F sin/sin 。
Z = F cos/2) 力矩的计算(a) 力对点之矩—、目的和要求能熟练地计算力在空间直角坐标轴上的投影。
熟练掌握力对点之矩与力对轴之矩的计算。
对空间力偶的性质及其作用效应有清晰的理解。
了解空间力系向一点简化的方法,明确空间力系合成的四种结果。
能正确地画出各种常见空间的约束反力。
会应用各种形式的空间力系平衡方程求解简单空间平衡问题。
对平行力系中心和重心应有清晰的概念,能熟练地应用坐标公式求物体 的重心。
1、2、3、4、5、6^ 7、在空间情况下力对点之矩为一个定位矢量,其定义为i j kM0(F) = rx F = x y z = (yZ - zY)i + (zX - xZ)j + (xY - yX)kX Y Zr = xi + yj + zk F = Xi+ Yj + Zk其中尸为力尸作用点的位置矢径(b)力对轴之矩在空间情况下力对轴之矩为一代数量,其大小等于此力在垂直于该轴的平面上的投影对该轴与此平面的交点之矩,其正负号按右手螺旋法则来确定,即M Z(F) = ±F u,h = +2AOAB在直角坐标条下有Mx (乃=yZ-zY M y (F)=zX-xZ M z (F) =xY-yX(c)力矩关系定理力对己知点之矩在通过该点的任意轴上的投影等于同一力对该轴之矩。
在直角坐标系下有Mo(F)^M x(F)i+My(F)j+M2(F)k(d)合力矩定理空间力系的合力对任一点之矩等于力系中各力对同一点之矩的矢量和,即Mo g)二 W, (F)空间力系的合力对任一轴(例如z轴)之矩等于力系中各力对同一轴之矩的代数和,即M z(F R)=ZM z(F)=Z(xY-yX)3)空间力偶及其等效条件(a)力偶矩矢空间力偶对刚体的作用效果决定于三个要素(力偶矩大小、力偶作用面方位及力偶的转向),它可用力偶矩矢肱表示。
第06讲-空间力系

1.力在空间直角坐标轴上的投影 1.力在空间直角坐标轴上的投影
一次投影法: 一次投影法:力F与三个 坐标轴所夹的锐角分别 为α、β、γ, 则力F在三 个轴上的投影等于力的 大小乘以该夹角的余弦 z
Fz F
γ
o
Fx = Fcosα Fy = Fcosβ Fz = F cos γ
FR ' = (∑ Fx ) 2 + (∑ Fy ) 2 + (∑ Fz + [∑ M y (F )]2 + [∑ M z (F )]2
• 空间力系的平衡方程 平衡的必要与充分条件: 平衡的必要与充分条件:
′ M o =0, FR =0
平衡方程: 平衡方程:
若已知力在三个坐标 Fx 轴上的投影Fx、Fy、Fz, 也可求出力的大小和方向, x 即 :
2 2
F
γ
o y
ϕ
Fy Fxy
F = Fx + Fy + Fz Fy Fx Fz cosα = ,cosβ = ,cosγ = F F F
2
2.力对轴之矩 2.力对轴之矩
门上作用一力F,使其绕 固定轴z转动。Fxy对z轴之矩 就是力F对z轴之矩,用Mz(F) 表示。则:
M z ( FR ) = ∑ M z ( F )
例1:图示力F=1000N,求F对z轴的矩Mz。 FZ
z
5
Fy
Fxy
y
Fx Fx
Fxy
x 10
Fy
x
3.空间力系的平衡 3.空间力系的平衡
空间力系的简化: 空间力系的简化 : 与平面任意力系的简化方法一样, 空间力系也可以简化为一个主矢和一个主矩。
3空间力系解析
(1)球铰(球形铰链)
球形铰链
(2)轴承(滚珠轴承),蝶铰链
轴 承
ZA
XA
蝶 铰
(3)止推轴承
(4)空间固定端
[例2] 图示起重机自重不计,已知:AB=3m,AE=AF=4m, Q=200kN,起重臂AC位于拉索BE、BF的对称平面内。求:索
X i 0, TA TB cos60 0
TA TB cos60
3 80 1
6
2
11.5 ( N )
Yi 0, N A TB sin 60 0
NA
3 80 6
3 20 ( N ) 2
[例5]绞车的轴安装于水平位置。已知绞车筒半径r1=10cm, 胶带轮半径r2=40cm,a=c=80cm,b=120cm,重物重P=10kN 。设胶带在垂直于转轴的平面内与水平成α=300角,且
三、空间一般力系向一点的简化
把研究平面一般力系的简化方法拿来研究空间一般力系的 简化问题,但须把平面坐标系扩充为空间坐标系。
设作用在刚体上有 空间一般力系
F1, F2 , F3 Fn 任选O点——简化中心
m1
F'1 F'n
= mn
m2
F'2
①根据力的平移定理,将各力向O点平移, 得到一空间汇交力系: F '1,F2 ',F3'Fn ' 和一附加空间力偶系:m1,m2 ,mn
[注意] m1,m2 ,mn 分别是各力对O点的矩。
②合成 F '1 , F2 ', F3 ',, Fn ',得主矢 R '
空间力系

第三章 空间力系一、空间汇交力系(一)空间汇交力系的合成 1.空间力在坐标轴上的投影 (1)一次投影法如图3-1所示,若已知力F 与三个坐标轴x,y,z 间的夹角分别为θ、β和γ,则力F 在三个坐标轴上的投影分别为⎪⎭⎪⎬⎫===γβθcos cos cos z y x F F F (3.1)图3-1相应的,若已知力F 的三个投影,可以求出力F 的大小和方向,即大小为 222z y x F F F F ++=(3.2)方向 ⎪⎪⎪⎭⎪⎪⎪⎬⎫===F FF F F F z yx γβθcos cos cos(3.3)(2)二次投影法如图3-2所示,若已知力F 与坐标轴Oxy 的仰角γ以及力F 在Oxy 平面上的投影xy F 与x 轴间的夹角ϕ,则力F 在三个坐标轴上的投影分别为γϕλϕγsin sin in cos in F F Fs F Fs F z y x ===,,图3-22.合力投影定理 合力在某轴上的投影,等于各分力在同一坐标轴上投影的代数和。
即∑=+++=xixn x x Rx FF F F F 21 同理 ∑∑==ziRz yi RyF F F F ,3.空间共点力系的合成空间共点力系可以合成为一个合力,该合力的作用线通过力系的公共作用点,合力的大小和方向为()()()222∑∑∑++=zyxR F F F F (3.4)()()()⎪⎪⎪⎭⎪⎪⎪⎬⎫===∑∑∑R z R R yRR xRF F F F F F k F j F i F ,cos ,cos ,cos(3.5)(二)空间汇交力系的平衡 1.空间汇交力系的平衡条件空间汇交力系平衡的充要条件是合力等于零,即()()()0222=++=∑∑∑zyxR F F F F2.空间汇交力系的平衡方程根据平衡条件,得到空间汇交力系的平衡方程为⎪⎪⎭⎪⎪⎬⎫===∑∑∑000y x zFFF(3.6)利用上述三个方程,可以求解3个未知量。
理论力学-第三章空间力系
例3-4 已知: F , l , a, 求: x F , M y F , M z F M
解: 把力 F 分解如图 M x F F l a cos
My
F Fl cos
M z F F l a sin
飞机向前飞行 飞机上升 飞机侧移 飞机绕x轴滚转
飞机转弯 飞机仰头
二.空间任意力系的简化结果分析(最后结果)
合力 FR 0, M O 0 过简化中心合力
FR 0, M O 0, FR M O
合力.合力作用线距简化中心为
d M O FR
§3–2
力对点的矩和力对轴的矩
一.力对点的矩以矢量表示 ——力矩矢
三要素:
(1)大小:力 F 与力臂的乘积
(2)方向:转动方向 (3)作用面:力矩作用面.
M O (F ) r F
M O ( F ) (r F ) ( xi yj zk ) ( Fx i Fy j Fz k ) ( yFz zFy )i ( zFx xFz ) j ( xFy yFx )k
空间力偶系平衡的充分必要条件是 :合力偶矩矢等于零,即
M 0
M
x
0
M
y
0
M
z
0
--称为空间力偶系的平衡方程.
例3-6 已知:两圆盘半径均为200mm,AB =800mm,圆盘面O1垂直于 z轴,圆盘面O2垂直于x轴,两盘面上作用有力偶,F1=3N, F2=5N,构件自重不计. 求:轴承A,B处的约束力. 解: 取整体,受力图如图所示.
第三章 空间力系
Ft tan Fa Ft tan Fr cos
第三章 空间力系
【课堂练习】图示力F作用在A点,此力在x轴、y轴、z轴 上的投影分别是多少?
第三章 空间力系
三、交于一点且互相垂直的三力的合成
力直角平行六面体法则
F=
Fx2 Fy2 Fz2
Fx cosα= F
Fy cosβ= F
第三章 空间力系
(2)力F对各坐标轴之矩为: Mz(F )= Mz(Fx)+Mz(Fy)= -Fx· y+Fy· x= -10.98 N· m Mx(F )=Mx(Fy)+Mx(Fz)= -Fy· z-Fz· y= -105 N· m My(F)=My(Fx)+My(Fz)=Fx· z+Fz· x=53.3 N· m。
解:
(1)确定车刀刀尖为研究对象,以工件主轴为水平轴空间 直角坐标系。
第三章 空间力系
( 2)刀尖受力分析
刀尖受到径向力Fx(沿x轴方向)、轴向力Fy(沿y轴方 向)、圆周力Fz(沿z轴方向)的作用。 (3)用力直角平行六面体法则求合力F 以三力Fx、Fy、Fz为棱边作一直角平行六面体,则此六面 体的对角线即为三力的合力F=19.6 kN
第三章 空间力系 三、空间力系的平衡条件和平衡方程
力矢的主矢和力系对空间任意一点的主矩都等于零。
FR' 0
,
Mo 0
Fy =0 Fy=0 Fz=0 Fz =0 Mx(F )=0 Mz(F )=0
• 空间汇交力系力系 Fx =0 • 空间平行力系力系 Fy=0 • 空间任意力系力系 Fx=0 • 空间力偶系力系
第三章 空间力系 四、空间力系平衡的平面解法
1.确定研究对象,画出受力图。
第三章空间力系概论
§3-1 空间汇交力系
例3-1:支柱AB顶端B上作用两个力,大小均为2kN,方向如图所示。
试分别写出两个力在三个坐标轴上的投影。
§3-1 空间汇交力系
例3-1:支柱AB顶端B上作用两个力,大小均为2kN,方向如图所示。
M rBA F
2、力偶的性质 (1)力偶中两力在任意坐标轴上投影的代数和为零 . (2)力偶对任意点取矩都等于力偶矩,不因矩心的改
变而改变。 (3)只要保持力偶矩不变,力偶可在其作用面内
任意移转,且可以同时改变力偶中力的大小
与力偶臂的长短,对刚体的作用效果不变. (4)只要保持力偶矩不变,力偶可从其所在平面
2.力对轴的矩
M z (F) MO (Fxy) Fxy d
d
Fxy
O
力与轴相交或与轴平行(力与轴在同一平面内), 力对该轴的矩为零.
3、力对点的矩与力对过该点的轴的矩的关系 Mx (F) Mx (Fx ) Mx (Fy ) Mx (Fz ) Fz y Fy z
M y (F) M y (Fx ) M y (Fy ) M y (Fz ) Fx z Fz x Mz (F) Fy x Fx y
F,l, a,
求:M x F , M y F , M z F
解:把力 F 分解如图
M x F F l a cos M y F Fl cos
M z F F l a sin
§3–3 空间力偶
1、力偶矩以矢量表示--力偶矩矢
F1 F2 F1 F2
空间力偶的三要素 (1) 大小:力与力偶臂的乘积; (2) 方向:转动方向; (3) 作用面:力偶作用面。
3 空间力系(教资优择)
§3-3 空间力偶
1、力偶矩以矢量表示,力偶矩矢
M
A
F
F
B
M
rA rB
O
MO F ,F MO F MO F rA F rB F
rB rA AB, F F '
M0 F, F AB F M
第三章 空间力系
力偶对空间任一点的矩矢与矩心无 关,这样的矢量称为自由矢量 空间力偶对刚体的作用效果决定于下列因素: (1)矢量的模,即力偶矩的大小M=Fd; (2)矢量的方位与力偶作用面相垂直; (3)矢量的指向与力偶的转向关系服从右手螺旋法则
力在轴上的投影等于该力与该轴单位矢的点积
第三章 空间力系
2、空间汇交力系的合力与平衡条件
z F2
FR
F1 O
Fn1 y
Fn
空间汇交力系的合力等于各分力 的矢量和,合力作用线通过汇交点
n
FR Fi
i 1
x
空间汇交力系的合力在任一轴的投影,等于
各分力在同一轴上投影的代数和
FR
F i x
Fy j
3、力对点的矩与力对通过该点的轴的矩的关系
MO F x M x F MO F y M y F
MO F z M z F
力对点的矩矢在通过该点的某轴上的 投影,等于力对该轴的矩
第三章 空间力系
例题3-3 已知F作用于D点,a,b,c,求 M AC (F )
C
Dc
Fb
A
aB
第三章 空间力系
xFy yFx
M x F yFz zFy M y F zFx xFz
M z F xFy yFx
第三章 空间力系
例题3-2
已知力F 在垂直于y轴的平面内,BC平行于 x轴,CD平行于 y轴,AB=BC=l,CD=a, 求 F 对 x、y、z三轴的矩
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
O xh a
y b Fxy
符号规定:从z轴正向看,若力使刚体逆时针转则取正号,反之 取负。也可按右手螺旋法则确定其正负号。
由定义可知:(1)当力的作用线与轴平行或相交(共面)时,力 对轴的矩等于零。(2)当力沿作用线移动时,它对于轴的矩不变。
力对轴之矩实例
Fz Fy
Fx
3.2力对点的矩和力对轴的矩
由力偶的性质可知:力偶的作用效果取决于力偶矩 的大小、力偶转向和作用面方位。因此可用一矢量M表 示:选定比例尺,用M的模表示力偶矩的大小;M的指 向按右手螺旋法则表示力偶的转向; M的作用线与力偶 作用面的法线方位相同。如图所示。 M称为力偶矩矢。
Fx 0 Fy 0
Fz 0
空间汇交力系平衡的必要与充分条件是:该力系力系 中所有各力在三个坐标轴上的投影的代数和分别等于 零。
例1 重为P的物体用杆AB和位于同一水平面的绳索AC与AD支承,如图。已知
P=1000N,CE=ED=12cm,EA=24cm, = 45°,不计杆重;求绳索的拉
z MO(F)
O
r
h x
B F
A(x,y,z) y
3.2力对点的矩和力对轴的矩
以r表示力作用点A的矢径,则
z
B
MO(F) r F
以矩心O为原点建立坐标系,则 MO(F)
F
r xi y j zk F Fx i Fy j Fz k
i jk MO(F) r F = x y z
Fx Fy Fz
Fx F sin g cosj Fy F sin g sinj Fz F cosg
z Fz
gF Fx j
Fxy x
Fy y
3.1 空间汇交力系
2.空间汇交力系的合成与平衡
(1)合成 将平面汇交力系合成结果推广得:
FR F1 F2 F n Fi
或 FR Fx i Fy j Fz k
力和杆所受的力。
解:以铰A为研究对象,受力如图。
D E
A
X 0 :TC sin TD sin 0
C
Y 0 : TC cos TD cos S sin 0
P
B
Z 0 : S cos P 0
由几何关系:
cos 24 2
12 2 24 2 5
解得:
S 1414N TC TD 559 N
kr Oj
ih x
A(x,y,z) y
( yFz zFy )i (zFx xFz ) j (xFy yFx )k
3.2力对点的矩和力对轴的矩
力矩矢MO(F)在三个坐标轴上的投
z
影为
[M O (F )]x yFz zFy
MO(F)
[M O (F )]y zFx xFz [M O (F )]z xFy yFx
y
b
cos a2 b2
a2 b2 c2
cosj a
a2 b2
M y (F) 0
M z (F ) M z (Fx ) M z (Fy ) M z (Fz ) Fya
如图所示,长方体棱长为a、b、c,力F沿BD,求力F对AC之矩。
解:
M AC (F ) M C (F ) AC
M C (F ) F cos a Fba
求力F在三轴上的投影和对三轴的矩。
z
解:
Fx F cos cosj
Fa a2 b2 c2
c
Fy F cos sinj
Fb a2 b2 c2
x
Fz F sin
Fc a2 b2 c2
M x (F ) M x (Fx ) M x (Fy ) M x (Fz ) Fyc
F
a j Fxy
z
C
E DTD TCx
A
y
S
P
B
3.2力对点的矩和力对轴的矩
1. 力对点的矩以矢量表示-力矩矢
空间力对点的矩的作用效果 取决于:力矩的大小、转向和力 矩作用面方位。这三个因素可用 一个矢量MO(F)表示,如图。其模 表示力矩的大小;指向表示力矩 在其作用面内的转向(符合右手螺 旋法则);方位表示力矩作用面的 法线。由于力矩与矩心的位置有 关,所以力矩矢的始端一定在矩 心O处,是定位矢量。
z
Fz
F B
A(x,y,z)
Fy
Fx
O
y
ya x
Fy
Fx
Fxy
b
3.2力对点的矩和力对轴的矩
比较力对点的矩和力对轴的矩的解析表达式得:
[M O (F )]x M x (F ) [M O (F )]y M y (F ) [M O (F )]z M z (F )
即:力对点的矩矢在通过该点的某轴上的投影,等于力 对该轴的矩。
设力F沿三个坐标轴的分量分别为Fx, Fy,Fz,力作用点A的坐标为(x,y,z),则
M z (F ) MO (Fxy )
MO (Fx ) MO (Fy ) xFy yFx
同理可得其它两式。故有
M x (F ) yFz zFy
x
M y (F ) zFx xFz
M z (F ) xFy yFx
第三章
空间力系
3.1 空间汇交力系
1.力在直角坐标轴的投影
若已知力与正交坐标系Oxyz三轴间夹角,则用直 接投影法
z
Fx F cos(F , i)
Fz
Fy F cos(F , j) Fz F cos(F , k)
F
kj Fx i
Fy
y
x
3.1 空间汇交力系
当力与坐标轴Ox 、Oy间的夹角不易确定时,可把 力F先投影到坐标平面Oxy上,得到力Fxy,然后再把这 个力投影到x 、y轴上,这叫间接投影法。
a2 b2
B
C
F
D
c
A
a
b
M AC (F ) M C (F ) cos
Fabc a2 b2 a2 b2 c2
3.3空间力偶
空间力偶的性质
力偶由一个平面平行移至刚体另一个平行平 面不影响它对刚体的作用效果。
R
F' B FO
A R'
F2 F1 B1
A1 F'1的矢量表示,力偶矩矢
kr Oj
ih x
B F
A(x,y,z) y
3.2力对点的矩和力对轴的矩
2.力对轴的矩
力F对z 轴的矩定义为:
Mz (F ) MO (Fxy ) Fxyh 2AOab
z FB A
力对轴的矩是力使刚体绕该轴转动效果 的度量,是一个代数量,其绝对值等于 力在垂直于该轴平面上的投影对于轴与 平面交点的矩。
合力的大小和方向为:
FR ( Fx )2 ( Fy )2 ( Fz )2
cos(FR
,
i)
Fx FR
, cos(FR
,
j)
Fy FR
, cos(FR
,
k)
Fz FR
3.1 空间汇交力系
(2)平衡
空间汇交力系平衡的必要与充分条件是:该力系的合 力等于零。
FR Fi 0
以解析式表示为: