微光和红外图像假彩色融合与处理算法研究
04图像融合技术概论(像素级)
图像像素级融合算法(讲稿1)2、图像融合算法研究主要集中介绍像素级融合算法。
依实现原理划分,像素级图像融合算法大体分为:代数算法,假彩色技术,图像调制技术,多分辨技术,基于视觉神经动力学的图像融合技术,等。
2.1 代数法代数法包括加权融合、单变量图像差值法、图像比值法等。
最常用的方法是加权平均法。
加权平均法主要是运用代数运算和线性运算来处理图像,是早期的图像融合方法。
它的基本原理是不对源图像进行任何的图像变换或分解,而是直接对各源图像中的对应像素进行选择(选取最大值或最小值)、平均或加权平均等简单处理后输出融合图像。
以表示融合图像的第个像素灰度值,表示参加融合的第幅图像第个像素灰度值。
表示参加融合的第幅图像第个像素的权值。
加权平均法的数学表示式为:根据实际应用的需要,代数法可采取局部和全局处理。
下面主要说明全局法的处理过程。
考虑到图像的整体性,所有融合运算采用了统一标准,因此称为全局法。
主要步骤如下:(1)求出图像灰度的最大值、最小值、均值与方差;(2)由这些参数通过一定的运算,计算出一个变换式,可将高分辨力图像的灰度变成0到1的实数;(3)用变换后的实数与低分辨力图像进行一定的运算,其所得到的结果即为融合图像;(4)这个图像往往色调比较暗,必须进行增强才能满足要求。
设高分辨力图像灰度、灰度最小值、最大值、均值与方差分别为,低分辨力图像灰度值为,融合后的灰度值为,为变换系数。
2、假彩色技术假彩色(False Color)图像融合处理的原理基于如下事实:人眼对颜色的分辨力远超过对灰度等级的分辨力。
因此,如果通过某种彩色化处理技术将蕴藏在不同原始信道图像灰度等级中的细节信息以不同的色彩来表征,可以使人眼对融合图像的细节有更丰富的认识。
以假彩色法来实现图像融合的工作由来已久,随着对人眼生理特性认识的逐步深入,这种方法也在不断改进,以期达到既能将各原始信道的图像信息尽量地表现出来,又能使融合图像的可视效果符合人眼生理习惯的目的,这是当前假彩色研究的关键所在。
基于可见光与红外图像特征融合的目标跟踪
基于可见光与红外图像特征融合的目标跟踪闫钧华;陈少华;许俊峰;储林臻【期刊名称】《中国惯性技术学报》【年(卷),期】2013(000)004【摘要】Aiming at the problem that the accuracy of tracking object is not high when with a single image source, CAMShift(Continuously Adaptive Mean Shift) tracking algorithm is improved by using different characteristics of the tracked target in the visible images and infrared images. Firstly,“color-gradient back projection”is selected as the improved target model in visible image, and“gray-gradient back projection”is selected as the improved target model in infrared image. Then the coefficient of qi which is got by using the improved CAM Shift tracking algorithm in visible images and infrared images respectively is used to judge the effect of the two images tracking. The weights of two images are adjusted adaptively by the coefficient of qi. Finally, the feature fusion image and the location of object are got according to the respective weight. The experimental results show that, for visible and infrared image of 320pixel×240pixel, the object tracking algorithm which is based on feature fusion by visible images and infrared images can get much accurate location of tracking target under complex background in which the accuracy of tracking object is 0.5pixel, and the velocity of tracking object is 30-32 ms/frame.%针对单一图像源下目标跟踪精度不高的问题,利用跟踪状态下的目标存在于可见光与红外图像中的特征对连续自适应均值移动跟踪算法做出改进。
基于小波变换的红外与可见光图像的融合
层小波变换分解算法相 同。
3 . 2 基 于小 波 变换 的 融 合
参考 文献
… 1 聂 其贵 , 马 惠珠 ,基 于 目标 提 取 的 红 外
与可 见光图像融合新算 法 【 J ] .应 用 科
技 . 2 0 1 4 ( 1 0 】 : 4 9 - 5 2 .
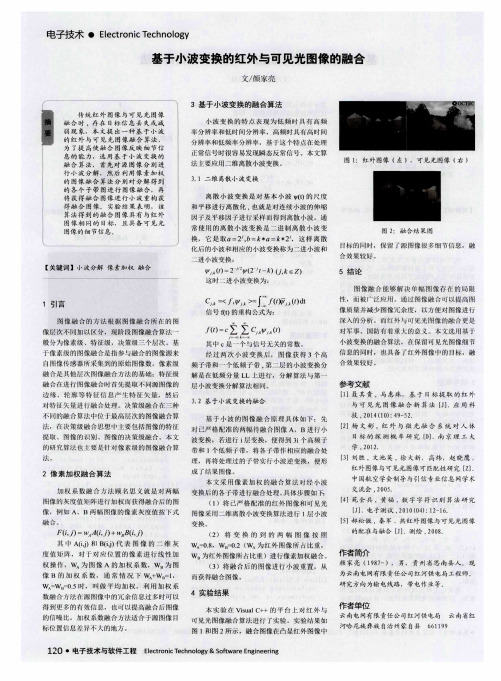
基 于小 波的 图像 融合 原理 具体 如 下:先 对 已严格配 准的两幅待融合 图像 A,B进行小 波变换 ,若进行 i 层 变换 ,便 得到 3 i 个高频 f 带和 1个低频 子带 ,将 各子带作相应的融合处 理 ,再将处理 过的予带实行小波逆变换,便形
. I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
图 2 : 融合 结 果 图
和平移进 行离散化 , 也就 是对连续 小波 的伸缩 因子及平移 因子进行 采样 而得到离散小波 。通 常 使用 的 离散小 波变 换 是二进 制离 散小 波变
换 , 它 是 取 a=2 , b:k} a=k} 2 , 这 样 离 敞 化 后 的 小波 和 相应 的 小 波 变 换 称 为 二 进 小 波 和 进 小波 变 换 :
红 外 图像 与可 见 光 图像 可 匹 配 性研 究 【 z 】 .
2像素加权融合算法
加 权 系数融 合 , J ’ 法 顾 名 思 义就 是 对 两 幅 像 的 灰 度 值 矩 阵 进 行加 权 而 获 得 融 合 后 的
将 获 得 融 合 图 像 进 行 小 波 重 构 获 得融 合 图像 。 实验 结 果表 明,该 算法 得到 的 融合 图像 具有 与 红外 图像 相 同 的 目 标 , 且 具 备 可 见 光 图像 的 细节 信 息
基于GAN的红外与可见光图像融合算法
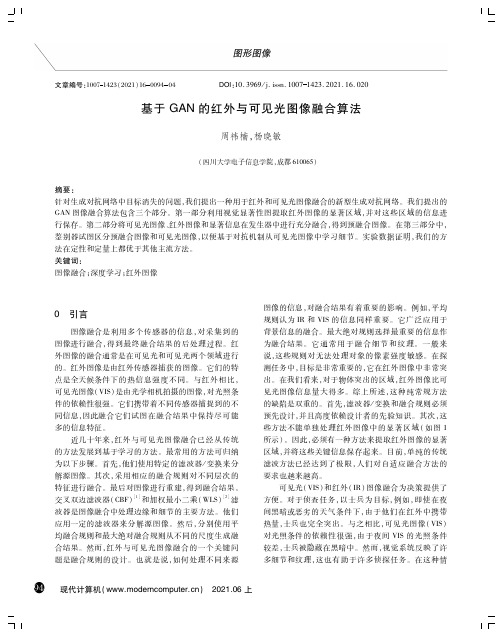
为了验证我们所提出的算法的有效性和有效性
我们选取了六对典型的图像对进行主观评价这六对 图像对在可见光和红外图像融合中被广泛应用 实验 结果如图# 所示
实验结果可以看出作为对比的方法简单易行不 能保留原有的显著区域 这是因为它每次从可见光图 像中迭代学习显著区域的边缘和强度都会受到越来 越多的约束 为此在./8中引入64P过程并提取显 著区域是非常必要的 然而我们基于./8的方法解 决了这个问题成功地保存了丰富的热信息 以Y列 的直升机为例其他算法无法保持边缘尖锐的突出物 体这将导致在某些计算机视觉任务中分类效果不理 想 相比之下本文算法成功地保留了显著信息这将 大大有利于分类任务
红外原始图像和可见光原始图像的分辨率不同是 一个值得注意的事实 由于不同传感器的特性红外 图像的分辨率较低而可见光图像的分辨率较高 为 了解决这个问题我们对红外图像进行了采样 随后 我们将红外和可见光图像的大小调整为1%' q1%' 的 比例作为优化的图像对 最后我们将每个图像的跨 距设置为%0以裁剪足够的数据 这样我们就可以产 生大量的红外和可见光数据集以训练本文网络
在鉴别过程中鉴别器输出预测的标签计算预融 合图像与可见光图像之间的损失 这个过程可以看作 是一个融合过程因为它试图最小化预融合图像和可 见光图像之间的差异 我们采用最小二乘损失函数作 为损失函数对预融合图像和可见光图像进行约束从 而融合出丰富的可见光信息 换句话说鉴别器被设 置成区分预融合图像和可见光图像之间的差异直到 可以忽略差异为止 ./8的鉴别器由五组模块组成 如图% 所示 在第一组模块中我们应用了# q# 卷积 层和R*:a函数 从第二组到第四组模块我们应用了 # q# 卷积层Y;,KF83)V操作和R*:a函数 在最后一 组模块中我们应用一个线性层来输出预测的标签
《2024年复杂背景条件下的红外小目标检测与跟踪算法研究》范文
《复杂背景条件下的红外小目标检测与跟踪算法研究》篇一一、引言随着红外成像技术的不断发展,红外小目标检测与跟踪技术在军事、安防、自动驾驶等领域具有越来越广泛的应用。
然而,由于复杂背景条件下的红外图像具有多种噪声干扰、动态变化和低信噪比等特点,红外小目标的检测与跟踪一直是一个具有挑战性的问题。
本文旨在研究复杂背景条件下的红外小目标检测与跟踪算法,为实际应用提供理论依据和技术支持。
二、红外小目标检测算法研究2.1 背景建模与噪声抑制在复杂背景下,红外图像中的噪声和背景干扰是影响小目标检测的关键因素。
为了有效地抑制噪声和背景干扰,本文采用基于动态背景建模的方法。
该方法通过建立背景模型,实时更新背景信息,从而实现对动态背景的准确描述。
在此基础上,采用滤波算法对图像进行预处理,以降低噪声对小目标检测的影响。
2.2 小目标检测算法针对红外小目标的特性,本文采用基于形态学和边缘检测的算法进行小目标检测。
首先,通过形态学滤波器对图像进行滤波处理,以增强小目标的特征。
然后,利用边缘检测算法提取出小目标的边缘信息。
最后,通过设定阈值和连通性分析,实现对小目标的准确检测。
三、红外小目标跟踪算法研究3.1 跟踪算法概述红外小目标跟踪是利用检测到的目标信息,在连续帧图像中实现对目标的稳定跟踪。
本文采用基于滤波预测和特征匹配的跟踪算法。
该算法结合了滤波预测和特征匹配的优点,能够在复杂背景下实现对红外小目标的稳定跟踪。
3.2 滤波预测算法滤波预测算法是利用上一帧目标的位置信息,通过滤波器对目标进行预测。
本文采用卡尔曼滤波器进行预测,通过对系统噪声和测量噪声的统计特性进行建模,实现对目标位置的准确预测。
3.3 特征匹配算法特征匹配算法是利用目标的特征信息,在连续帧图像中实现目标的匹配。
本文采用基于灰度特征和形状特征的匹配算法。
首先,提取出目标区域的灰度特征和形状特征。
然后,通过计算特征之间的相似度,实现目标的匹配。
在匹配过程中,采用优化算法对目标位置进行微调,以提高跟踪的准确性。
红外与可见光图像融合算法研究

红外与可见光图像融合算法研究一、本文概述随着科技的发展,图像处理技术已经成为现代社会中不可或缺的一部分,尤其在军事、医疗、安全监控等领域,其应用日益广泛。
红外与可见光图像融合算法作为图像处理技术的一个重要分支,近年来受到了广泛关注和研究。
本文旨在深入探讨红外与可见光图像融合算法的原理、方法及其应用,为相关领域的研究和实践提供理论支持和技术指导。
本文将概述红外与可见光图像融合的基本概念,包括红外图像和可见光图像的特点、图像融合的必要性以及融合的基本原理。
在此基础上,将详细介绍目前国内外在红外与可见光图像融合领域的研究现状和发展趋势,包括各种融合算法的优势和局限性。
本文将重点研究红外与可见光图像融合的关键技术,包括图像预处理、特征提取、融合策略等。
针对这些关键技术,本文将深入分析其原理、方法及其优缺点,并结合实际案例进行具体说明。
同时,本文还将探讨如何优化融合算法,以提高融合图像的质量和效率。
本文将通过实验验证所研究的红外与可见光图像融合算法的有效性和可行性。
通过实验数据的收集、处理和分析,将评估融合算法的性能指标,如清晰度、对比度、融合度等,并与其他算法进行对比分析。
本文还将讨论融合算法在实际应用中的潜力和挑战,为未来的研究提供方向和建议。
本文将全面深入地研究红外与可见光图像融合算法的原理、方法及其应用,以期为相关领域的研究和实践提供有益参考和借鉴。
二、红外与可见光图像融合技术概述红外与可见光图像融合技术是一种多源信息融合技术,旨在将红外图像和可见光图像中的有用信息进行融合,以生成一种包含更多信息、更具可读性和可理解性的新图像。
这种技术能够结合不同传感器捕捉到的信息,利用它们各自的优点,以弥补彼此的不足。
红外图像主要反映物体的热辐射信息,对于隐蔽目标、伪装目标以及夜间目标的检测具有显著优势。
红外图像往往分辨率较低,且难以区分目标的细节和纹理。
而可见光图像则提供了丰富的色彩和纹理信息,对于场景的识别和目标的分类具有较好的效果。
近红外图像增强与彩色化算法
文章编号:2095-6835(2018)02-0024-04近红外图像增强与彩色化算法*史珂,郑鑫毅,汤春明,魏鑫,张新新,杜月新,乐娟(天津工业大学电子与信息工程学院,天津300387)摘要:提出了一种新的近红外图像增强与彩色化算法,先将近红外图像取反,然后用MSRCR算法处理取反后的RGB三个通道的图像,将处理后的RGB三通道灰度值分别拉伸合并成一幅新的图像,取反后用改进的导向滤波实现图像增强,用改进的BOF算法检索用于给近红外图像上色的彩色参考图像,接着采用Welsh算法对增强后的近红外图像分区域上色,再通过纹理匹配选取相似像素点,实现近红外图像的彩色化。
实验结果表明,这种算法增强后的图像细节清晰,色彩传递效果好,且算法运行速度比较快。
关键词:近红外图像增强;彩色化;MSRCR算法;检索彩色参考图像中图分类号:TP391.1文献标识码:A DOI:10.15913/ki.kjycx.2018.02.024很多重要的夜视或低照度场景,比如军事基地、安全中心和交通要塞等,主要利用红外图像实现全面监控。
红外图像反映了目标场景的热辐射信息,它主要是由目标场景的辐射率差和温差决定的。
红外图像具有对场景亮度变化不敏感,以及对于目标具有良好的探测性等优点,所以被广泛应用。
但是,研究发现,红外图像丢失了原有可见光图像的一些细节边缘和纹理等特征。
于是,Stan.Z提出了近红外(NIR)图像成像系统,NIR即波长范围为0.7~1.1μm的光,它既具有红外成像的一些优点,又能保持一定的细节特征。
然而,近红外图像依然存在对周围环境温度变化比较敏感、对玻璃的非穿透性等缺点,且由于实际获取图像时会受到外部环境,比如光照不足、光照不均、雾霾雨水等恶劣天气的影响,严重影响了图像的视觉质量,因此,我们需要对获取的近红外图像进行增强和彩色化,以便获得更好的视觉效果。
目前存在的近红外图像增强算法主要有基于直方图均衡、自适应的直方图增强算法和Retinex理论[1-5]等。
基于超分辨率重建的红外图像处理研究
基于超分辨率重建的红外图像处理研究一、研究背景与意义红外图像具有光学成像无法替代的优势,但由于其相应器件等硬件限制,成像质量相对受限。
如何利用算法优化红外图像的信息提取效率,使得红外图像能够更好地为工业监控、医学诊断等领域提供服务,成为当前的研究热点。
超分辨率重建技术是利用多帧低分辨率图像姓名官队高分辨率图像的一种算法。
其技术特点在于能够通过低分辨率图像获得更有细节明显、轮廓更加鲜明的高分辨率图像,从而实现对图像的全面分析和应用。
二、红外图像处理研究的现状1. 红外图像成像质量方面的限制红外图像成像质量的限制主要来自于两方面:其一是红外探测器器的分辨率受限,其二是复杂环境下红外图像环境噪声严重。
2. 红外图像降噪算法为了消除红外图像的环境噪声,减少影响图像质量的因素,科研工作者提出了许多基于信号处理、图像滤波等方面的降噪算法。
然而这些算法的优劣性并未被充分测试,且在使用效果上具有更多的局限性。
3. 超分辨率重建算法的应用超分辨率重建算法能够更好地衍生出画面明细更加清晰的高分辨率图像,因此也受到了科研工作者的重视。
然而超分辨率重建算法在红外图像处理方面应用尚处在起步阶段,存在较多的技术难点和待解决的问题。
三、基于超分辨率重建的红外图像处理的研究内容1. 红外图像的超分辨率重建算法分析红外图像超分辨率重建算法基于多图像滤波算法(MBF)和重叠数据块算法(ODA)相结合。
其中,MBF算法主要通过图像滤波的方式提取图像细节信息,ODA算法则是通过工程技术和计算机软硬件方面的完善平台,提高处理效率和生成质量。
2. 基于人工神经网络的红外图像超分辨率重建人工神经网络(ANN)在红外图像处理方面也有着广泛的应用。
科学家通过ANN网络对多帧低分辨率图像进行分析与学习,并输出高分辨率图像。
尤其是在图像处理的细节和清晰度提升方面,ANN算法具有较高的优势。
3. 红外图像超分辨率重建实验研究实验结果表明,基于超分辨率重建的红外图像处理技术能够有效提高红外图像处理的信息提取效率,使得图像的图文一致度更高,对于红外监控、医学诊断等领域均有着重要的应用价值。
基于深度学习的红外图像目标检测算法研究
基于深度学习的红外图像目标检测算法研究随着深度学习技术的不断进步和发展,其在计算机视觉领域的应用也越来越广泛。
其中,基于深度学习的红外图像目标检测算法也在近几年迅速发展,并在各种实际应用中展现出了非常出色的效果。
本文将深入探讨基于深度学习的红外图像目标检测算法的研究现状、技术原理、应用前景等相关问题。
一、研究现状在深度学习技术的不断推动下,基于深度学习的红外图像目标检测算法也取得了不少进展。
其中,目前最常用的深度学习模型包括卷积神经网络(Convolutional Neural Networks,CNN)、循环神经网络(Recurrent Neural Networks,RNN)和使用多模态数据的联合深度学习模型(Joint Deep Learning Model)。
其中,卷积神经网络在红外图像目标检测中应用最为广泛,也取得了非常优秀的效果。
在红外图像目标检测中,深度学习算法的应用主要有以下几个方面。
首先,采用深度学习算法对红外图像进行预处理,可以有效地提高图像的质量和分辨率,从而更好地进行后续的目标检测任务。
其次,深度学习算法可以对红外图像中的目标进行分类和识别,实现自动化的检测任务。
此外,深度学习算法还可以对目标进行跟踪和追踪,实现目标在大范围内的准确定位和追踪。
二、技术原理在基于深度学习的红外图像目标检测中,卷积神经网络是最常用的模型。
其基本原理是通过一系列的卷积层、池化层、全连接层等网络层次,将输入图像进行特征提取和转换,最终输出目标的概率和位置信息。
具体来说,卷积层可以对图像进行特征提取和压缩,池化层可以对特征进行降维和抽象,全连接层可以对特征进行分类和回归。
这些网络层次之间的组合和拼接,可以实现高效准确的目标检测任务。
此外,当前流行的基于深度学习的目标检测算法通常还采用了一些优化技术,如非极大值抑制(Non-Maximum Suppression,NMS)、快速多尺度检测(Speedup Multi-scale Detection,SMD)和多标签平滑(Multi-Label Smoothing,MLS)等。
红外与可见光图像融合算法研究
红外与可见光图像融合算法研究随着红外和可见光摄像技术的进步,红外与可见光图像融合技术成为当前研究的热点之一。
红外图像和可见光图像各有其独特的优势,在特定的应用领域中,将两者融合可以提供更全面、更准确的信息,从而改善图像的识别和分析性能。
红外图像主要反映目标的热量分布情况,能够穿透雾霾、烟尘等干扰,适用于夜间监测、目标探测等场景。
而可见光图像则能够提供丰富的纹理和颜色信息,适用于白天场景下的目标识别和追踪。
因此,将红外图像和可见光图像进行融合可以充分利用两者的优势,提高图像的可视性和识别能力。
红外与可见光图像融合算法是指将两幅不同模态的图像融合为一幅综合图像的过程。
目前,常用的融合算法包括基于像素级的融合算法和基于特征级的融合算法。
像素级融合算法直接对两幅图像的像素进行加权平均或最大值选择等操作,简单高效,但无法充分利用两幅图像的特征信息。
特征级融合算法则利用图像的特征信息(如边缘、纹理等)进行融合,能够提取更丰富的信息,但计算复杂度较高。
近年来,随着深度学习技术的发展,深度学习算法在红外与可见光图像融合中的应用逐渐增多。
深度学习算法能够自动学习图像的特征表示,通过卷积神经网络等结构,将图像的特征进行提取和融合,提高了融合结果的质量和准确性。
但深度学习算法在数据需求和计算资源方面存在一定的限制,需要大量的标注数据和高性能计算设备。
红外与可见光图像融合算法的研究还面临着许多挑战,如如何充分利用两幅图像中的信息、如何提高融合结果的视觉质量、如何提高算法的实时性等。
未来的研究可以从以下几个方面进行:优化融合算法的性能,提高融合结果的清晰度和准确性;研究多模态图像融合算法,将更多类型的图像信息进行融合;开发适用于特定应用场景的融合算法,提高图像在特定环境下的识别能力。
总之,红外与可见光图像融合算法的研究对于提高图像识别和分析性能具有重要意义。
未来的研究需要继续探索新的融合算法,并结合实际应用需求,不断提高融合算法的性能和实用性,推动该领域的发。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图J.J.1金字塔融合算法
在以往的塔式融合算法中,数据融合的方法一般有:①逻辑方法(与、或); ②平均法:③特征选择方法(有基于像素和基于区域的选择法);④加权法。在 图像的小波变换域,系数的幅值代表了原始图像在该分辨率下灰度变化的剧烈 程度,可用小波变换域的局部极值点来重构小波系数,从而重构原始图像。局 域能量较大像素代表了原始图像中的明显特征。由于图像的边缘特征一般大于 一个像素,可以使用基于区域的特征选择并结合加权方法,在各分辨率的细节 图像中选择代表各原始图像的明显特征的系数,构成融合图像的金字塔数据结 构,然后重构融合图像。如果重建的图像超出动态显示范围,则需要重新进行
(1)基于伪彩色实现的多重图像融合 人眼能分辨的颜色有上千种,但只能区分从黑到白的20多种灰度。伪彩色
处理通过把不同灰度等级的像素分别置以不同的颜色,将那些人眼不能分辨的 扶度转化成能分辨的颜色,提高了细节分辨能力。因此,灰度图像的伪彩色显 示是一种非常有效而又常用的图像增强处理技术。
在主要针对热图像和微光CCD图像的融合研究中,为了使融合结果具有一 定的自然性,一般把温度图像的高灰度级对应融合图像的暖色调,如品、黄、 红等,而低灰度级对应于冷色调。因此,可用热图像的灰度信息来调整微光图 像像素的灰度级.即首先实现基于素级的多重灰度图像融合。它与一般的多
1.1 3像素级多传感器图像融合的方法
1 夜视图像的狄度融合
夜视图像狄度融合的方法有很多,最简单的图像融合方法是直接对两幅图 像逐个像素耿平均,但是这种方法将使只在一幅图像中出现的特征对比度减弱。 为了解决这一问题,近年来提出了几种基于金字塔的图像融合方法,如高斯金 字塔、拉普拉斯金字塔、ROLP金字塔、梯度金字塔等。其基本思路是首先构 造输入图像的金字塔,再按一定的特征选择方法从中取值形成融合金字塔,通 过对融合金字塔实施逆变换即可获得融合图像。图1.1.1显示了从两幅图像的 金字塔形成一个融合金字塔,继而形成一幅融合图像的过程。
冠奄警酸骝
氆)RoH色空问卿u匹色童闾
图l 1 3 RGB和LHS色空间示意图
图1.1.4 RGB色空间假彩色融合
坝I.论义
微光和红外国像假彩色融台1j处理算怯研究
典型的RGB颜色通道的图像数据的来源有:多光谱图像、可见光图像、电 视图像、热成像图像、x光图像和核磁共振图像及各种卫星遥感图像等等。以 多光谱图像融合和热成像图像与微光CCD电视图像融合为例。当比较可见光 谱图像和近红外图像时,由于目标和场景在各波长的光谱反射特性各不相同, 导致各原始图像之间的灰度特性有很大差别,而热成像图像和微光图像的差别 更太。热成像图像反映目标和场景的红外辐射特性,而微光图像是反映物体的 反射特性,因此它们不仅在灰度特性表现出不相容,而且在热成像图像中,边 缘会在形状和尺度上发生变化。实验以及以往研究者的工作表明:图像之间的 这种差别,会给这类图像的配准和灰度图像融合带来较大的困难。而对于假彩 色图像融合来说,这种差别可以变成有利因素。利用这个差别,可开发出各种 算法,恰当地控制色差,达到更好地分辨目标与背景以及图像细节的目的。
蛐I境卫
微光和红外图像假彩色融台与处理算法研究
由此可见,发展多谱融台彩色夜视技术势在必行。
1 1.2像素级多传感器图像融合的含义及其特点
多传感器图像融合包括像素级、特征级和决策级三个层次。像素级图像融 合是在对各种传感器的原始信息未作许多预处理之前就进行信息的综合分析。 特征级的融合是在信息的中间层次上进行的,它是对预处理和特征抽取后获得 的景物信息,如边沿、形状、轮廓等信息进行综合处理。决策级的融合是在最 高层次上进行的信息融合,在融合之前,每种传感器相应的处理部件已独立地 完成了决策或分类任务,信息融合的工作实质是按一定的准则及每个传感器决 策的可信度进行协调.作出全局最优的决策。像素级图像融合是最低层次的图 像融合.该层次的数据融合准确性最高,能够提供其它层次上的融合所不具备 的细节信息,但因为需要处理的信息量大,因此对于计算机的运算速度和内存 容量要求较高。
chromatics and real—time processing,a number of theoretic algorithms of false color fusion and pre—processing on LLL and IR images are explored.In the technique of pre—processing on night vision images, such algorithms as image registration,non—uniformity correction,image enhancement are mainly studied and realized.An innovatory algorithm of full..scale non..uniformity correction on IR images is presented and an arithmetical progression histogram equalization algorithm in the enhancement of image is validated and developed in this dissertation.In the technique of fusion on night vision images,reformative algorithms of false color fusion on LLL and IR images and a series of derivative algorithms are put forward,Thought software emulation and practical experiment,the fusion effects are more excellent than those of the original algorithms,
在现代高技术条件下的局部战争中,夜间观察能力已成为军队战斗力的重 要组成部分。夜视技术的迅速发展,以各种成像传感器为核心的夜视器材的广 泛使用,增加了需要同步观察和监视的图像数量,导致了信息表现形式的多样 性。它在使夜间战场变得透明的同时,加大了操作人员的工作负担,使得操作 人员在连续观察多个图像时,往往不能有效地对所获得的视觉信息进行综合分 析,特别是当几个操作人员同时观察多个成像系统时更是如此。利用交替显示 每个传感器的视频信号的办法来显示最佳传感器的信号,即使在静态环境中也 难以完成。因此把来自多个成像传感器的图像融合成一幅图像具有很大的实用 价值。
小波变换被认为是傅里计分析方法的突破性进展,在夜视图像融合也得到 了应用。与金字塔方法相比,所做的主要修改就是用小波变换替代了金字塔a 小波变换把图像的边缘特征按尺度映射到塔式结构的各层中,在相同的尺度下, 对多幅原始图像在小波变换域进行基于像素级特征的融合。
——塑!:鱼苎
堂垄塑堑丛里堡堡墅鱼壁鱼!竺些竺竺里!塞 ¥otao。nn蝴.Oa
Keywords:pre.processing,false color,fusion,non—uniformity correction, image enhancement
——兰生兰受王—一一 塑垄塑塾堑望堡堡翌垒墼鱼兰竺塑塞生堕塞
.
1绪论
1.1多传感器图像融合概述
1.1.1多传感器图像彩色融合的意义
另外,各种图像传感器的性能极大地依赖于使用环境,至今还没有一种图 像传感器在多种不同的使用条件下,其各项性能(作用距离、测量精度、分辨 率、抗干扰、灵敏度等)都高于其它类型的图像传感器,融合多传感器图像能 够提高图像探测系统的探测和识别能力。多传感器图像融合改变了传统单一通 道显示和处理的落后方法,可有效地摹取多通道图像信息特征,构成统一图像 或图像特征.提供显示中心显示或决策机构判别。
(2)基于RGB色空间的假彩色图像融合 基于RGB色空间(如图1.1.3(a1所示)的图像融合算法结构是:对R,G,
B各基色通道赋予来自不同图像传感器的图像数据(经过处理的或没有经过处 理的),合成一幅假彩色图像。以达到识别目标与背景、分辨图像细节等目的。 如图1.1,4将原始图像映射到RGB三通道的预处理计算是该算法的核心环节。 本算法的最大特点是计算简单,速度快,便于硬件实现。但是,彩色调色板(即 彩色标尺)的确定需要通过多次试验比较,才能得到一个相对最佳结果,而不 同的目标和背景对彩色调色板的要求又各不相同。该方法一般用于1—3个图像 通道的数据融合。
比例变换和量化。 2夜视图像的假彩色融合
由于应用环境(目标与场景)不同,图像的特性多种多样,对各种任务的 要求也各不相同,因此假彩色图像融合算法也各种各样。目前尚未发现在各种 任务要求下融合效果全优的算法。所使用的算法大体可分为三类;灰度融合后 采用伪彩色编码融合,基于RGB色空间的假彩色融合,基于LHS色空间的假 彩色融合。
以往的微光和红外热像的显示图像是单色的,通过区分颜色可以提高人类 视觉,特别是在低亮度对比情况下,目标与背景之间的色度差别对将目标从其 周围背景中识别出来的概率有显著影响。另一方面,对于微光夜视系统,由于 其输入照度低及目标与背景的反射差别小,因而所获取的视频信息具有很低的 信噪比。对于红外热像夜视系统.尽管由于工作在较长光谱波段,对成像辐射 有良好的大气透射比,因而有更佳的图像探测性能,但热像细节对比常不如可 见与微光图像好,增加了目标识别困难。基于这样的实际技术背景,以提高目 标探测与识别概率为目的的多谱融合彩色夜视技术,受到入们越来越多的重视。
碗卜论艾