第7章回转体的平衡
第7章机械动力学
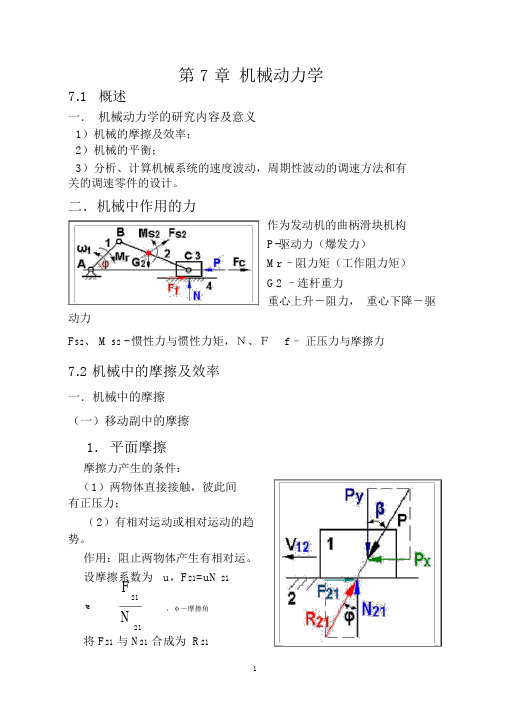
第 7 章机械动力学7.1概述一.机械动力学的研究内容及意义1)机械的摩擦及效率;2)机械的平衡;3)分析、计算机械系统的速度波动,周期性波动的调速方法和有关的调速零件的设计。
二.机械中作用的力作为发动机的曲柄滑块机构P-驱动力(爆发力)Mr –阻力矩(工作阻力矩)G2 –连杆重力重心上升-阻力,重心下降-驱动力F S2、 M S2 - 惯性力与惯性力矩,N、F f –正压力与摩擦力7.2 机械中的摩擦及效率一.机械中的摩擦(一)移动副中的摩擦1.平面摩擦摩擦力产生的条件:(1)两物体直接接触,彼此间有正压力;(2)有相对运动或相对运动的趋势。
作用:阻止两物体产生有相对运。
设摩擦系数为u,F21=uN 21F21tg,φ-摩擦角N21将 F21与 N21合成为 R21R21-总反力(全反力)P X P分解为 P和 P ,tgX Y P Y( P X P sin、 P Y P cos )F21P X,有F21tgY 方向平衡: Py=N 21,即:tg tg P Xtg讨论:①总反力 R21恒与相对速度V 12成 90° +φ②当β >φ, P X > F21,滑块作加速运动;当β =φ, P X = F21,动则恒动,静则恒静;当β <φ, P X < F21,原来运动,作减速运动,原来静止,永远静止,称自锁。
③ 自锁条件:β≤φβ=φ,条件自锁(静止);β<φ,无条件自锁。
2.斜面摩擦斜面机构如图,滑块置于升角α的斜面上,摩擦角为φ,作用于滑块上的铅垂力为Q,求滑块等速上升和下降时所需水平平衡力P 和 P’。
(1)求等速上升水平平衡力 PP-驱动力, Q-阻力PQ R 21 0 ,tg ()P,P Qtg () (1)Q( 2)求等速下降水平平衡力 P ’Q -驱动力, P ’-阻力P'Q R 21 0 ,tg () P ',P 'Qtg () (2)Q讨论:① 欲求下滑 (反行程) P ’,只需将式 ( 1)中 P →P ’,φ→ (-φ )② 下滑时,当α >φ, P ’为平衡力α <φ, P ’为负,成为驱动力的一部分,该条件下,若无 P ’,则无论 Q 多大,滑块不下滑,称自锁,自锁条件:α≤φ。
机械工程图学习题集加详细答案 第7章

7-5完成被截切圆柱的三面投影。
(2)完成水平和侧面投影
7-5完成被截切圆柱的三面投影。
(3)完成水平和正面投影
7-5完成被截切圆柱的三面投影。
(3)完成水平和正面投影
7-5完成被截切圆柱的三面投影。
(4)完成侧面投影。
7-5完成被截切圆柱的三面投影。
(4)完成水平投影。
7-5完成被截切圆柱的三面投影。
(2)完成水平及侧面投影(注意整理轮廓线)。
7-9完成相贯体(平面立体与曲面立体)的投影。
(2)完成水平及侧面投影(注意整理轮廓线)。
7-9完成相贯体(平面立体与曲面立体)的投影。
(3)完成正面和侧面投影(注意整理轮廓线)。
7-9完成相贯体(平面立体与曲面立体)的投影。
(3)完成正面和侧面投影(注意整理轮廓线)。
7-10完成相贯体(曲面立体与曲面立体)的投影。 (6)
7-10完成相贯体(曲面立体与曲面立体)的投影。 (6)
7-10完成相贯体(曲面立体与曲面立体)的投影。 (7)
7-10完成相贯体(曲面立体与曲面立体)的投影。 (7)
7-10完成相贯体(曲面立体与曲面立体)的投影。 (8)
7-10完成相贯体(曲面立体与曲面立体)的投影。 (8)
7-6完成被截切圆锥的三面投影。
(4)完成水平和侧面投影。
7-6完成被截切圆锥的三面投影。
(5)完成水平和侧面投影。
7-6完成被截切圆锥的三面投影。
(5)完成水平和侧面投影。
7-6完成被截切圆锥的三面投影。
(6)完成水平和侧面投影。
7-6完成被截切圆锥的三面投影。
(6)完成水平和侧面投影。
7-10完成相贯体(曲面立体与曲面立体)的投影。 (1)
机械设计基础第7章机械动力学基础
的牙型斜角β。图7-5所示为三角形螺纹螺旋副的摩擦。对于
这类螺旋副,若忽略螺纹导角的影响,则可把螺杆相对螺 母的运动近似为楔形滑块相对于斜槽面的运动。
第 7 章 机械动力学基础
因此,只要用当量摩擦角φv代替式(7-2)、(7-3)中的摩 擦角φ,就可得到这类螺旋副的摩擦计算式。由图可知,
在这种情况下,相当的楔形滑块的半楔角θ等于90°-β。
第 7 章 机械动力学基础
当轴颈1在驱动力矩T的作用下相对于轴承2以等角速度 ω转动时,由于轴颈与轴承之间存在间隙,因此两者之间为
线接触,轴颈1在与轴承2接触处将受到法向反力N及摩擦力
Ff的作用。将N与Ff合成为总反力R,因R应与Fr组成一阻止 轴颈转动的力偶,其力偶矩Tf与驱动力矩T相平衡,故轴颈 与轴承的接触点k应偏右,如图7-7(b)
(7-15)
(2) 对于跑合轴颈,由于轴端各处的磨损程度不一 致,而使压强的分布如图7-10中曲线所示,一般可近似
认为压强与半径的乘积为常数,由此可推得
1 rf ( R r ) 2
(7-16)
第 7 章 机械动力学基础
图7-11 (a) 结构图; (b)
第 7 章 机械动力学基础
例7-1 可随意调整上下高度的衣帽钩结构如图7-11(a)所 示。设立柱与套筒之间的摩擦系数为f,P为衣帽钩的自重,
因此滑块将保持原来的运动状态(等速下滑或静止)。若导角
小于摩擦角,即λ<φ时, F < 0,则表明要使滑块等速下滑, t 必须成为驱动力 (反向)。显然,在这两种情况下,若滑块原 Ft
来静止,则无论Fa有多大,滑块都将保持静止(即自锁)。因
此,矩形螺纹螺旋副摩擦和斜面摩擦时的自锁条件为 λ≤φ (7-4)
(NEW)杨可桢《机械设计基础》(第6版)笔记和课后习题(含考研真题)详解(修订版)
第1章 平面机构的自由度和速度分析 1.1 复习笔记 1.2 课后习题详解 1.3 名校考研真题详解
第2章 平面连杆机构 2.1 复习笔记 2.2 课后习题详解 2.3 名校考研真题详解
第3章 凸轮机构
3.1 复习笔记 3.2 课后习题详解 3.3 名校考研真题详解 第4章 齿轮机构 4.1 复习笔记 4.2 课后习题详解 4.3 名校考研真题详解 第5章 轮 系 5.1 复习笔记 5.2 课后习题详解
图1-2-1 唧筒机构
图1-2-2 回转柱塞泵
图1-2-3 缝纫机下针机构
图1-2-4 偏心轮机构 答:机构运动简图分别如图1-2-5~图1-2-8所示。
1-5至1-13.指出(图1-2-9~图1-2-17)机构运动简图中的复合铰链、局
部自由度和虚约束,计算各机构的自由度。
解:(1)图1-2-9所示机构的自由度为 (2)图1-2-10中,滚子1处有一个局部自由度,则该机构的自由度为 (3)图1-2-11中,滚子1处有一个局部自由度,则该机构的自由度为 (4)图1-2-12所示机构的自由度为
(5)图1-2-13所示机构的自由度为 (6)图1-2-14中,滚子1处有一个局部自由度,则该机构的自由度为 (7)图1-2-15中,滚子1处有一个局部自由度,A处为三个构件汇交的 复合铰链,移动副B、B'的其中之一为虚约束。则该机构的自由度为 (8)图1-2-16中,A处为机架、杆、齿轮三构件汇交的复合铰链。则该 机构的自由度为 (9)图1-2-17所示机构的自由度为 1-14.求出图1-2-18导杆机构的全部瞬心和构件1、3的角速比。
2015研、厦门大学2011研]
【答案】自由度大于0,且自由度数等于原动件数
2.两构件通过______或______接触组成的运动副称为高副。[常州大学 2015研]
船舶流体力学第7章(打印)

第七章 势流理论(二)本章主要讨论:轴对称有势流动和机翼绕流的有关理论。
§7.1 轴对称流动一条曲线绕轴旋转一周形成的物体形状称为旋成体。
当来流沿旋成体中轴线方向绕流旋成体时,通过中轴线的各子午面上的流动均相同,这种流动称为轴对称流动。
比如,均匀流绕圆球的流动。
对于无旋轴对称流动,存在速度势函数φ和流函数ψ 。
但,速度势函数φ是调和函数,流函数 ψ 不是调和函数。
采用柱坐标(r ,θ,x ),设 x 轴为对称轴,流动参数不随 θ 变化。
),,(t x r v v r r = ),,(t x r v v x x =不可压缩流体的轴对称势流应该满足:()()0=∂∂+∂∂xrv r rv x r 连续性方程:0=∂∂-∂∂r v x v xr 无旋条件: 如果存在物体壁面S ,速度应该在物面上满足边界条件:0=v 物面法向流速为零:∞=V 无穷远处流速:求解不可压缩流体轴对称势流问题的主要任务就是寻求满足以上方程组和边界条件的速度矢量。
有两种数学求解途经:rxV ∞轴对称轴途径一:0122222=∂∂+∂∂+∂∂=∇xr r r φφφφ控制方程:0=V 物面无穿透条件:∞=V 无穷远处来流:xv rv x r ∂∂=∂∂=φφ,这里:速度势函数φ是调和函数,可以采用叠加法求解。
途径二:0122222=∂∂+∂∂-∂∂=x r r r D ψψψψ控制方程:0=V 物面无穿透条件:∞=V 无穷远处来流:rr v xr v x r ∂∂=∂∂-=ψψ1,1这里:流函数函数Ψ不是调和函数,称为斯托克斯函数。
但它是线性的,也可采用叠加法求解。
一.基本的轴对称势流:1.均匀直线流:0,,0===∞θv V v v x r∞=∂∂==∂∂=V x v r v x r φφ,0 x V ∞=∴φ∞=∂∂==∂∂-=V r r v x r v x r ψψ1,01又 221r V ∞=∴ψ2.空间点源(汇)流:(0 , 0)处有一点源 Q : R v R Q 24π=()22244xr QR Q v R +==ππ如图,有:()22224sin xr rx r Q v v r R r +⋅+===∂∂∴πθφ()22224cos xr xx r Q v v x R x +⋅+===∂∂∴πθφ 2214xr Q +⋅-=∴πφ()23224x r rxQrv r x +==∂∂πψ又:()232224x r Qr rv x r +=-=∂∂πψ且:224x r xQ +⋅-=∴πψ 22224,14xr xQ xr Q +⋅-=+⋅-=πψπφ即:当点源在 x 0 点(轴对称轴上),速度势函数和流函数为:()()22022414x x r x x Q x x r Q -+-⋅-=-+⋅-=πψπφ 3.空间偶极子流:0lim 0>=∆∞→→∆M x Q Q x 令:()()23222222220414114limx r x M x r x M x x x r xr x Q Q x +⋅-=⎪⎪⎭⎫⎝⎛+∂∂=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡∆∆-+-+∆=∞→→∆πππφ令:()23224x r x M +⋅-=∴πφ ()232224x r r M +⋅=πψ亦可得:当偶极子在 x 0 点(轴对称轴上),速度势函数和流函数为:()[]()[]232322222044x x r r M x x r x x M-+⋅=-+-⋅-=πψπφ*二.均匀来流绕圆球体的流动:采用球坐标(R ,θ,λ)。
机械设计基础第7章回转体的平衡

§7-2 回转体的平衡计算
一、静平衡和静不平衡
对于轴向尺寸很小的回转体, 其宽径比(B/D)小于0.2,例如 齿轮、盘形凸轮、带轮、链轮 及叶轮等,其质量的分布可以 近似地认为在同一回转面内。
这种回转体的不平衡是因为其质心位置不在回转轴线上,且 其不平衡现象在回转体的轴水平搁置时就能显示出来,故称 为静不平衡。
若使Fb’与Fb”完全代替F,必须满足:
Fb 'Fb" Fb Fb 'l Fb"l
Fb 'Fb" Fb Fb 'l Fb"l
又: l l l
则:
Fb
'
l l
Fb
Fb "
l l
Fb
mb rb
l l
mb rb
mbrb
l l
mb rb
体可以在任何位置保持静止,而不会自行转动,因此这种 平衡称为静平衡(单面平衡)。 综上所述,静平衡的条件是:分布于该回转体上各个质量 的离心力(或质径积)的向量和等于零,即回转体的质心与 回转轴线重合。
通常尽可能将rb的值选大些,以便使mb小些。
有些结构在所需平衡的回转面上不能安装平衡质量, 可选另两个回转面分别安装平衡质量使回转体达到平衡。
如图所示的转子中,设不平衡
质量m1、m2分布于相距l的两个 回转面内,且m1=m2 ,rl=-r2。
该回转体的质心虽落在回转轴
上,而且m1 rl+ m2r2 = 0,满足
静平衡条件。
但因m1和m2不在同一回转面内,当 回转体转动时,在包含m1、m2 和
机械设计基础教材
第25页/共476页
F = 3×3–2×4 = 1
F = 3×4–2×5 = 2
n = 3
Pl= 4
n = 4
Pl = 5
如图1-12(a):
如图1-12(b):
第26页/共476页
【例1-2】如图1-13所示,计算曲柄滑块机构的自由度。 活动构件数n=3低副数高副数
第19页/共476页
第20页/共476页
第21页/共476页
平面机构运动简图的绘制
绘制机构运动简图的步骤:(1)分析机构的组成,观察相对运动关系,了解其工作原理。(2)确定所有的构件(数目与形状)、运动副(数目和类型)。(3)选择合理的位置,能充分反映机构的特性。(4)确定比例尺 (5)用规定的符号和线条绘制成机构运动简图。
1. 机构运动简图的定义
第15页/共476页
运动副及构件的表示方法
1.构件构件均用直线或小方块来表示,如图1-6示。
第16页/共476页
2.转动副
第17页/共476页
3.移动副 如图1-8所示,注意移动副的导路应与两构件相对移动的方向一致。
第18页/共476页
4.高副两构件组成高副时的相对运动与这两个构件在接触处的轮廓形状有直接关系,因此,在表示高副时必须画出两构件在接触处的曲线轮廓。如图1-8、图1-9所示为齿轮高副和凸轮高副的表示方法。
图1-4 (a)凸轮高副
平面机构中高副引入一个约束,保留两个自由度。
图1-4 (b)齿轮高副
第12页/共476页
运动链与机构
运动链:两个以上的构件以运动副连接而构成的系统。如图1-5所示,若运动链中各构件首尾相连,则称之为闭式运动链,否则称为开式运动链。
机械基础第2版习题答案第7章
机械基础第2版习题答案第7章第七单元支承零部件练习题一、名词解释1.轴轴是支承传动件(如齿轮、蜗杆、带轮、链轮等)的零件。
2.曲轴曲轴是指将回转运动转变为往复直线运动(或将往复直线运动转变为回转运动)的轴。
3.软轴软轴是由几层紧贴在一起的钢丝构成,可将扭矩(扭转及旋转)灵活地传递到任意位置的轴。
4.心轴心轴是指工作时仅承受弯矩作用而不传递转矩的轴。
5.转轴转轴是指工作时既承受弯矩又承受转矩的轴。
6.传动轴传动轴是指工作时仅传递转矩而不承受弯矩的轴。
7.轴承轴承是用来支承轴或轴上回转零件的部件。
8.滑动轴承滑动轴承是工作时轴承和轴颈的支承面间形成直接或间接滑动摩擦的轴承。
9.滚动轴承滚动轴承是将运转的轴与轴座之间的滑动摩擦变为滚动摩擦,从而减少摩擦损失的一种精密的机械元件。
二、填空题1.支承零部件主要包括轴和轴承,它们是组成机器不可缺少的重要零部件。
2.轴是支承传动件的零件,轴上被支承的部位称为轴颈,轴的功用是支承回转零部件,并使回转零部件具有确定的位置,传递运动和扭矩。
3.轴承是支承轴颈的支座,轴承的功用是保持轴的旋转精度,减少轴与支承件之间的摩擦磨损。
4.轴按其形状进行分类,可分为直轴、曲轴和软轴(或挠性轴、钢丝软轴)三类。
5.轴的结构包括轴颈、轴头、轴身三部分。
6.根据轴承工作时摩擦性质的不同,轴承分为滑动轴承和滚动轴承两大类。
7.滑动轴承根据承受载荷方向的不同,可分为向心滑动轴承和推力滑动轴承两大类。
8.滑动轴承通常由轴承座、轴瓦(或轴套)、润滑装置和密封装置等组成。
9.常用的轴瓦分为整体式轴瓦和剖分式轴瓦两种结构。
10.滑动轴承的失效形式主要有磨粒磨损、刮伤、胶合(咬粘)、疲劳、腐蚀等。
11.滚动轴承一般由内圈、外圈、滚动体和保持架组成。
12.常见的滚动体有球、短圆柱滚子、长圆柱滚子、球面滚子、圆锥滚子、螺旋滚子、滚针等多种。
13.滚动轴承的分类方法很多,按滚动轴承所能承受的载荷方向或公称接触角进行分类,可分为向心滚动轴承和推力滚动轴承。
工程图学第7章立体的相贯线
交线为两条平面 曲线(椭圆)
例:补全正面投影
●
●
●
●
●
●
●
●
●
● ●
● ●
●
●
● ●
● ●
★ 外形交线
◆ 两外表面相贯 ◆ 一内表面和一外表面相贯
★ 内形交线
◆ 两内表面相贯
小 结:
无轮是两外表面相贯, 还是一内表面和一外表面 相贯,或者两内表面相贯, 求相贯线的方法和思路是 一样的。
外表面和内表面相交
外表面和内表面相交
挖孔后
切割后
内表面和内表面相交
两圆柱相交时,相贯线的形状和位置取决于它们直径的相对 大小和轴线的相对位置,表中表示两圆柱面的直径相对大小变 化时对相贯线的影响。这里特别指出的是,当相贯线(也可不垂 直)的两圆柱面直径相等,即公切一个球时,相贯线是相互垂直 的两椭圆,且椭圆所在的平面垂直于两条轴线所确定的平面。
Pv
1’
2’
Qsvv
3’ (6’) (5’)
4’
1”
Pw
6”
2”
Qw
5”
3”
Sw
4”
Ⅰ 56
1 4
32
Ⅳ
求圆柱与半球的相贯线
例4:求两轴线交叉圆柱的相贯线
RW
Y
作图:
4`` 3``
2``
(5``)
(6``) a``
1.求特殊点
垂直圆柱的水平投影中 标注特殊点。先确定转向
(7``) 1`` 轮廓线上的点。
垂直相交两圆柱直径相对变化时的相贯线
水平圆柱较大
第7章滚动齿轮习题解答
习题7-1 如图所示的滚齿机工作台传动机构,已知各轮齿数为z1=15,z2=28,z3=15, z4=35,z 9=40及被切齿轮B的齿数为64,求传动比i75.题7-1图题7-2图7-2 如图所示轮系中,已知各轮齿数为z1=20,z2=25,z2′=20,z3=40,z3′=35,z4=40,z4′=2(右旋), z5=60, z5′=20(模数m=4mm)。
若n1=500r/min,求齿条6的线速度v的大小和方向。
7-3如图所示轮系中,已知z1=z3′=20, z3=z5=60.试求(1)齿轮2和齿轮4的齿数z2和z 4;(2)传动比i15题7-3图题7-4图7-4 如图所示钟表传动机构,N为发条盘,E为擒纵轮,S、M与H分别为秒针、分针和时针。
已知z1=72,z2=12,z3=64,z4=8,z5=60,z6=8,z7=60,z8=6,z9=8,z10=24,z11=6,z 12=24。
求秒针与分针的传动比iSM及分针与时针的传动比iMH。
7-5 如图所示轮系,已知各轮齿数z1=60,z2=20,z2′=30,z3=15;在图a中,若已知n 3=150r/min,n1=50r/min,n3和n1转向如图所示,求nH的大小和转向。
在图b中,若已知n 3=150r/min,n1=50r/min,转向如图所示,求nH的大小和转向。
题7-5图7-6 如图所示的手动起重葫芦,各齿轮齿数分别为z1=30,z2=15,z2′=18,z3=54,求手动链轮S和起重链轮H的传动比iSH。
题7-6图题7- 7图7-7如图所示的液压回转台传动机构,已知z2=15,马达M的转速(指马达转子相对其壳体的转速)n M=12r/min ,回转台H 的转速(与马达转速n M相反)n H=-1.5r/min ,求齿轮1的齿数。
7-8如图所示的手动齿轮机构。
已知各轮齿数z 1=z 2′=40, z 2=z 3=38,求手柄转速n H与齿轮1转速n 1的传动比i H1。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
§7-2 回转体的平衡计算
一、静平衡和静不平衡
对于轴向尺寸很小的回转体, 其宽径比(B/D)小于0.2,例 如齿轮、盘形凸轮、带轮、 链轮及叶轮等,其质量的分 布可以近似地认为在同一回 转面内。
这种回转体的不平衡是因为其质心位置不在回转轴线 上,且其不平衡现象在回转体的轴水平搁置时就能显示 出来,故称为静不平衡。
令 r’b=r”b=rb 则:
结论:
mb
l l
mb
mb
l l
任意一个质径积都可以用任意选定的两个回转面
T’和T”内的两个质径积来代替。若向径不变,任一质
量都可用任选的两个回转平面内的两个质量来代替。
二、动平衡和动不平衡
轴向尺寸较大的回转体,如b/D0.2的转子,其质量的分布 不能再近似地认为是位于同一回转面内,而应看作分布于垂 直于轴线的许多互相平行的回转面内。这类回转体转动时所 产生的离心力系不再是平面汇交力系,而是空间力系。因此, 单靠在某一回转面内加一平衡质量的静平衡方法并不能消除 这类回转体转动时的不平衡。
第 7 章 回转体的平衡
§7-1 回转体平衡的目的 §7-2 回转体的平衡计算 §7-3 回转体的平衡试验
§7-1 回转体平衡的目的
一、回转体定义
机械中绕固定轴线作回转运动的构件称为回转体(或转子)。
二、回转体不平衡产生的原因
1.回转体的结构形状不对称、制造安装的误差;
2.材质不均匀。
F
一偏离回转Leabharlann 心距离为r的m1l1 l
m1
m1
l
l1 l
m1
m2
l2 l
m2
m2
l
l2 l
m2
m3
l3 l
m3
m3
l
l3 l
m3
因此,上述回转体的不平衡质量可以认为完全集中在Ⅰ和
Ⅱ两个回转面内。对于回转面Ⅰ ,其平衡方程为
mbrb m1r1 m2r2 m3r3 0
该回转体可以在任何位置保持静止,而不会自行转动, 因此这种平衡称为静平衡(单面平衡)。 综上所述,静平衡的条件是:分布于该回转体上各个 质量的离心力(或质径积)的向量和等于零,即回转体 的质心与回转轴线重合。
通常尽可能将rb的值选大些,以便使mb小些。
有些结构在所需平衡的回转面上不能安装平衡质量, 可选另两个回转面分别安装平衡质量使回转体达到平衡。
随回转体的转动而周期性变化,故 回转体仍处于动不平衡状态。
这种不平衡通常在回转体运转的情况下才能完全显示出来,故
称为动不平衡。对于动不平衡的回转体,必须选择两个垂直 于轴线的校正平面,并在这两个面上适当附加(或去 除)各自的平衡质量,使各质量产生的离心力与力偶 矩都达到平衡,这种平衡称为动平衡(双面平衡)。
位置有关; 2) 动平衡包含了静平衡的条件,故经动平衡的回转
体一定也是静平衡的。但是,静平衡的回转体却 不一定是动平衡的。
§7-3 回转体的平衡试验
结构上不对称于回转轴线的回转体,可以根据质 量分布情况计算出所需的平衡质量,使它满足平 衡条件。这样,它就和对称于回转轴线的回转体 一样在理论上达到完全平衡。
回转体的动平衡条件是:回转体上各质量的离心力的向量和 等于零,且离心力所引起的力偶矩的向量和也等于零。
如图所示,设回转体的不平衡质量ml、 m2 、 m3分布在1、2、3 三个回转面内,因为向径各为rl、 r2、 r3。现将平面1、2、3 内 的质量ml、 m2 、 m3分别用任选的两个回转面Ⅰ和Ⅱ内的质量 m1Ⅰ 、m2Ⅰ 、m3Ⅰ 和m1Ⅱ、m2Ⅱ、m3Ⅱ来代替。得:
F3
F2
Fb
F1
其平衡条件为
或
F=Fb+ ∑Fi=0
meω2= mbrbω2 + ∑miriω2=0 即
me= mbrb + ∑miri=0
上式中质量与向径的乘积称 为质径积,它表达各个质量所产 生的离心力的相对大小和方向。
F3
F2
Fb
F1
上式表明,回转体平衡后,e=0,即总质心与回转轴 线重合,此时回转体质量对回转轴线的静力矩mge=0,
对于结构对称的回转体,由于制造和装配误差以 及材质不均匀等原因,也会引起不平衡,而这种 不平衡是无法计算出来的,只能在平衡机上通过 实验的方法加以平衡。根据质量分布的特点,平 衡试验法也分为两种。
质量m,当以角速度ω转动时所
产生的离心力F为
ω
F=mrω2
三、回转体不平衡的影响
1.在转动时产生的离心力不平衡,在运动副上引起了不断变 化的动压力,降低机械效率,影响机械工作质量和寿命。
2.增大轴的弯曲应力,降低轴的强度。 3.使机械产生强迫振动和噪声。
四、回转体平衡的目的
调整回转体的质量分布,使回转体工作时离心力系达 到平衡,以消除附加动压力,尽可能减轻有害的机械振动。
静不平衡的回转体匀速转动 时,这些质量所产生的离心 力构成同一平面内的不平衡
汇交力系,它们的合力 ∑Fi不
等于零。
对于这种不平衡回转体,只要 在同一回转面内加一质量(或 在相反方向减一质量),使它 产生的离心力与原有质量所产 生的离心力的向量和等于零, 这个力系就成为平衡力系,此 回转体就达到平衡状态,这就 是回转体静平衡原理。
如图所示的转子中,设不平衡
质量m1、m2分布于相距l的两个
回转面内,且m1=m2 ,rl=-r2。
该回转体的质心虽落在回转轴
上,而且m1 rl+ m2r2 = 0,满足
静平衡条件。
但因m1和m2不在同一回转面内,当 回转体转动时,在包含m1、m2 和
回转轴的平面内存在一个由离心力
F1和F2组成的力偶,该力偶的方向
作向量图如图所示。由此求出质径积mbⅠrbⅠ 。选定rbⅠ 后 即可确定mbⅠ 。
同理,对于回转面Ⅱ ,其平衡方程为
mbrb m1r1 m2r2 m3r3 0
作向量图如图所示。由此求出质径积mbⅡrb Ⅱ 。选定rbⅡ 后即可确定mbⅡ。
特别提示: 1) 动平衡的不平衡质量与所选两个校正平面的相对
若使Fb’与Fb”完全代替F,必须满足:
Fb 'Fb" Fb Fb 'l Fb"l
Fb 'Fb" Fb Fb 'l Fb"l
又: l l l
则:
Fb
'
l l
Fb
mb rb
l l
mb rb
Fb "
l l
Fb
mbrb
l l
mb rb