三角网算法
delaunay三角网生长准则及算法

Delaunay 三角网是Voronoi(或称thiessen多边形,V 图)图的伴生图形◆Delaunay 三角网的定义:由一系列相连的但不重叠的三角形的集合, 而且这些三角形的外接圆不包含这个面域的其他任何点。
◆Voronoi图的定义:Voronoi图把平面分成N 个区,每一个区包括一个点,该点所在的区域是距离该点最近的点的集合。
◆Delaunay三角网的特性:◆不存在四点共圆;◆每个三角形对应于一个Voronoi图顶点;◆每个三角形边对应于一个Voronoi图边;◆每个结点对应于一个Voronoi图区域;◆Delaunay图的边界是一个凸壳;◆三角网中三角形的最小角最大。
空外接圆准则最大最小角准则最短距离和准则在TIN中,过每个三角形的外接圆均不包含点集的其余任何点在TIN中的两相邻三角形形成的凸四边形中,这两三角形中的最小内角一定大于交换凸四边形对角线后所形成的两三角形的最小内角一点到基边的两端的距离和为最小Delaunay三角剖分的重要的准则张角最大准则面积比准则对角线准则一点到基边的张角为最大三角形内切圆面积与三角形面积或三角形面积与周长平方之比最小两三角形组成的凸四边形的两条对角线之比。
这一准则的比值限定值,须给定,即当计算值超过限定值才进行优化Delaunay三角剖分的重要的准则不规则三角网(TIN)的建立●三角网生长算法就是从一个“源”开始,逐步形成覆盖整个数据区域的三角网。
●从生长过程角度,三角网生长算法分为收缩生长算法和扩张生长算法两类。
方法说明方法实例收缩生长算法先形成整个数据域的数据边界(凸壳),并以此作为源头,逐步缩小以形成整个三角网分割合并算法逐点插入算法扩张生长算法从一个三角形开始向外层层扩展,形成覆盖整个区域的三角网递归生长算法逐点插入算法分割合并算法12121212递归生长算法333TIN 建立过程中的几个问题:◆邵春丽.DELAUNAY 三角网的算法详述及其应用发展前景◆鲍蕊娜,等:基于凸壳技术的Delaunay 三角网生成算法研究◆于杰等:Delaunay 三角网构建方法比较研究周围点的提取 点在三角形中的查找 空外接圆判断准则 线段求交问题。
一种改进的Delaunay三角网生成算法
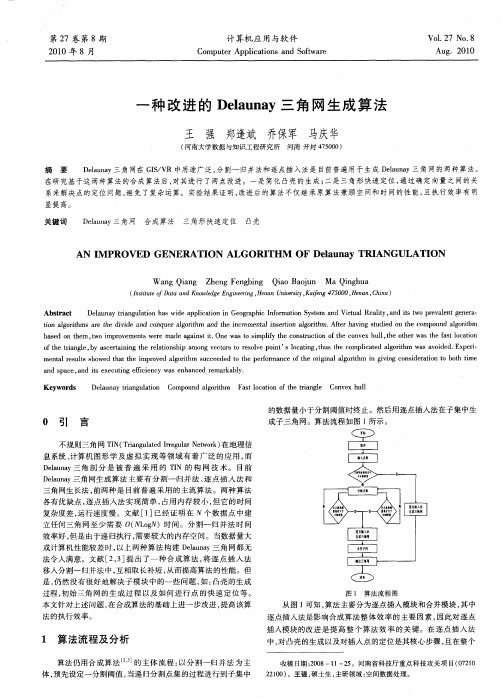
的数据量小于分割 阈值时终止 。然后用逐点插入法在子集中生
0 引 言
不规则三角 网 TN( r nuae r glr e ok 在地理信 I T a gl dI e a t r ) i t ru N w
息 系统 、 计算机 图形学 及虚拟 实现 等领域 有着 广泛 的应 用 , 而 D l ny三角 剖 分 是 被 普 遍 采 用 的 TN 的 构 网 技 术 。 目前 e ua a I
王 强 郑逢斌 乔保军 马庆华
( 河南大学数据与知识工 程研究所 河南 开封 4 5 0 ) 7 0 0
摘 要
D lua e ny三角 网在 GS V 中用途广 泛 , 割一 归并法和逐 点插入法是 目前普遍用 于生成 D lu a a I/ R 分 e ny三角 网的 两种 算法。 a
(ntueo aaa dK o l g n ier g,ea nvrt,a eg4 5 0 , ea , hn ) Istt fD t n nwe eE gne n H n nU i syK in 70 0 H n n C i i d i ei f a
Ab t a t sr c D lu a ra g lt n h swie a p ia in i o r p i n o mai n S se a d Vi u lRe l y a d i wop e ae t e e a e a n y t n u ai a d p l t n Ge ga hc I f r t y t m n r a a i , n t t r v n n r ’ i o c o o t t s l g
在研 究基于这两种算法 的合成算法后 , 对其进行 了两点改进 。一是简 化凸壳的生成 ; 二是 三角形快速定位 , 通过 确定 向量之 间的关
一种高效构建Delaunay三角网的算法

关 键词 : ea n y三角 网; 据分块 ; O D lu a 数 L P优 化 ; 不规则 三 角 网 中图分 类号 :P3 1 文献标 识码 : 文章编 号 :6 1—7 4 ( 0 0 0 T 1 A 17 17 2 1 ) 2—0 9 1 1—0 5
第 9卷 第 2期
21 0 0年 4月
江 南 大 学 学 报 (自 然 科 学 版 ) J u n l f in n nUnv ri ( au a ce c dt n o r a a g a ie s y N tr l in eE io ) oJ t S i
Vo . No 2 19 .
A i h- f c e y Al o ih fCo t u tng Dea H g Ef inc g r t m o nsr c i l una i ng a i n i y Tra ul tO
SHAN — i n , ZHENG o Xu x a g Ta , LIGe n
me h p rii n,t e tbu l ra g l t d ir g a t r so h s u e s inal tme g st e e s a tto h n i idsti n u a e r e ul rnewo k n t e e s bs t ,f ly i r e h s ting l rn t r ne b ne s q n i ly Th plti t d o h s a g rt ra u a e wo kso y o e ue ta l . e s itng meho ft i l o ihm a c e s h c n de r a e t e s a c c pe o o n sr ma ka l .Th eo mp o e a m c n t uid De a a ra ul to e r h s o fp i t e r b y e us fi r v d Gr ha s a o b l l un yti ng a i n o u bl c n r a e h ro ma c ft l o ih fs b- o k i c e s st e pe f r n e o he ag rt m.Ther s l fo x rme t h wst tt e e u to ure pe i n ss o ha h a g rt m sa ditnc up ro iy i h fi i n y o o tuc i g ir g l rnewo k l o ih ha si ts e i rt n t e efc e c fc nsr tn re u a t r . Ke wor y ds: d l u y ti n ulto e a na ra g a i n, da a e pa tton, ts t rii LOP o i zn ptmii g, ti n u a e ra g l t d
遥感影像三角网几何校正并行算法及优化研究

遥感影像三角网几何校正并行算法及优化研究遥感影像的几何校正是图像处理中一个重要的步骤,它可以消除影像中的几何畸变,提高图像的几何精度。
随着遥感影像数据的不断增加,如何高效地进行几何校正成为了一个挑战。
本文将讨论遥感影像三角网几何校正的并行算法及其优化研究。
第一部分:几何校正原理遥感影像的几何校正是通过建立几何变换模型,将传感器采集到的数据映射到真实世界坐标系中。
常用的几何校正方法有多项式拟合、重采样等。
三角网几何校正是其中一种重要的方法,它通过选择一些具有代表性的控制点,在图像上建立三角网,利用三角网的特性进行几何校正。
第二部分:并行算法并行算法是提高几何校正效率的重要手段。
在遥感影像三角网几何校正中,可以采用并行计算的方式加速计算过程。
一种常用的并行算法是基于图像分块的方法,将大图像切分为多个小块,在多个计算单元上同时进行计算。
此外,还可以利用并行处理器、图形处理器等硬件设备来实现并行计算,提升几何校正的速度。
第三部分:并行算法的优化为了进一步提高几何校正的效率,我们可以对并行算法进行优化。
一方面,可以采用任务划分和负载均衡的策略,将计算任务合理分配给每个计算单元,保证各个计算单元的工作负载平衡。
另一方面,可以结合GPU等硬件的特点进行优化,如优化访存模式、减少数据传输等。
第四部分:实验与结果为了验证所提出的并行算法及优化方法的有效性,我们进行了一系列的实验。
实验数据包括不同分辨率、不同大小的遥感影像。
实验结果表明,所提出的并行算法相较于传统算法,在几何校正的速度和效果上都有明显的提升。
结论:本文研究了遥感影像三角网几何校正的并行算法及其优化方法。
通过并行计算的方式,可以提高几何校正的效率,加速图像处理过程。
同时,通过优化并行算法,可以进一步提升几何校正的速度和精度。
在未来的研究中,可以进一步探索其他优化策略,进一步提高几何校正的效果。
三角网布设及概算

三角形生成
根据地形数据,利用三角形生 成算法,构建三角形网格。
结果输出
将生成的三角形网格输出为所 需格式,如DXF、DWG等。
Байду номын сангаас2
三角网布设方法
常规三角网布设方法
常规三角网布设方法
根据地形起伏和精度要求,在实地测量和计算的基础上,按照一定的 规则和密度布设一系列三角形,形成三角网。
适用范围
适用于地形起伏较小、精度要求一般的测量项目。
优点
操作简单,精度可靠,能够满足一般测量需求。
缺点
在地形起伏较大的地区,需要增加测量点和计算量,工作量大,效率 较低。
优化三角网布设方法
优化三角网布设方法
基于常规三角网布设方法,通过优化算法 和计算机技术,自动选择最优的三角形组
合和布设方案,提高测量效率和精度。
优点
能够自动选择最优的三角形组合和布设方 案,减少人工干预和计算量,提高测量效
三角网布设及概算
contents
目录
• 三角网布设概述 • 三角网布设方法 • 三角网布设的参数选择 • 三角网布设的概算 • 三角网布设的应用场景 • 三角网布设的未来发展
01
三角网布设概述
三角网布设的定义
三角网布设:根据地形数据,利用数 学和几何原理,将地形表面划分为一 系列连续三角形,形成三角网的过程。
THANKS FOR WATCHING
感谢您的观看
物力成本概算
物力成本
包括三角网布设所需的材料、设备等 费用。
物力成本概算
根据项目需求,选择合适的材料和设 备,并进行物力成本概算,以确保项 目预算的合理性和可行性。
时间成本概算
时间成本
包括三角网布设所需的时间费用,如 工期、维护期等。
基于三角网生成法的Delaunay三角网生成算法的研究与实现

基于三角网生长法的Delaunay三角网生成算法***************【摘要】论文简要介绍了Delaunay三角网的性质以及基本生成算法,并重点介绍了三角网生长法的基本原理和算法步骤,并通过设计合理的数据结构,对算法进行实现。
对算法进行分析并提出通过构建格网索引,进一步提高三角网生成效率。
【关键词】三角网生长法扩展TIN 格网索引1.引言数字地形模型DTM(Digital Terrain Model)是指对地形表面形态属性信息的数字表达,是带有空间位置特征和地形属性特征的数字描述[1]。
DTM是GIS的基础数据来源,可用于土地利用现状的分析、合理规划及洪水险情预报等。
DTM地形属性为高程时称为数字高程模型(DEM)。
DEM主要的三种表示模型为规则格网模型、等高线模型、不规则三角网模型(Triangular Irregular Network 简称TIN)。
数字化等高线模型不适合计算坡度或制作地貌渲染图等地形分析,规则格网数据结构简单,计算方便;但存在数据冗余,数据采集较麻烦,难以表达复杂地形等缺陷。
TIN即能够避免平坦地形时数据冗余,也能表达复杂地形,可以根据任意地形特征点表示DEM,因此被广泛应用。
Delaunay三角剖分能最大程度的接近等边三角形,避免狭长三角形,并且能保持三角网的唯一性,使其成为生成TIN的最佳选择。
本论文将简要介绍和比较几种常用的Delaunay三角网生成算法(逐点插入法,三角网生长法,分割合并算法等),并且对三角网生长法算法原理进行研究分析和程序实现。
2.Delaunay三角网的性质Delaunay三角网中的三角形必须满足以下几个性质:(1)空圆特性每一个Delaunay三角形的外接圆不包括Delaunay三角网中的任何其他点。
(2)最大最小角特性在三角剖分中,Delaunay三角网的所有三角形的最小角之和最大。
即使得Delaunay三角形最大程度接近等边三角形。
三角网法计算土石方全部过程

三角网法计算土石方全部过程三角网法是一种用来计算土石方的常用方法。
它通过建立一个三角网,将地面划分成许多小块,然后根据每个小块的高程数据计算出土方量。
以下是三角网法计算土石方的全部过程。
1.收集数据:首先,需要收集地面的高程数据。
可以使用现代测量设备如全站仪或GPS进行测量,也可以使用传统的水准仪和经纬仪方法进行测量。
测量要点应该覆盖整个工程区域,以获取更准确的高程数据。
2.建立三角网:根据测得的高程数据,可以使用计算机软件或手工方法建立一个三角网。
三角网是由互相连接的等边三角形组成的网络,其中每个顶点都有一个高程数值。
3.绘制等高线:根据建立好的三角网,可以绘制等高线。
等高线是连接具有相同高程数值的点的曲线。
绘制等高线有助于观察地形的变化,并用于后续土石方计算。
4.划定计算区域:根据工程需要,将整个地面划分成不同的计算区域。
每个计算区域都应该是一个封闭的区域,包含一个或多个三角形。
5.计算每个计算区域的面积:将每个计算区域的三角形面积相加,即可得到该区域的面积。
可以使用海伦公式或其他适用的方法来计算三角形的面积。
6.计算每个计算区域的平均高程:将每个计算区域的三个顶点的高程相加,然后除以3,即可得到该区域的平均高程。
7.计算每个计算区域的体积:将每个计算区域的面积乘以其平均高程,即可得到该区域的体积。
这个体积表示该区域的挖方或填方量。
8.汇总计算结果:将每个计算区域的挖方或填方量相加,即可得到整个工程区域的土石方量。
9.验证计算结果:为了验证计算的准确性,可以进行现场实测。
使用测量仪器测量挖方或填方后的实际土方量,并进行比较。
如果计算结果与实测结果相符,则说明计算准确。
需要注意的是,三角网法只适用于地形复杂或具有大坡度的工程。
对于较为平坦的地形,可以使用其他方法如平均截面法来计算土石方量。
此外,在进行土石方计算时,应考虑到工程的实际需求和限制,并确保按照相关标准和规范进行计算。
生成三角网格的三种基本方法

生成三角网格的三种基本方法
生成三角网格的三种基本方法
Shamos和Hoey提出了分治算法思想[10],并给出了一个生成V-图的分治算法。
Lewis和Robinson将分治算法思想应用于生成D-三角网[11]。
他们给出了一个“问题简化”算法,递归地分割点集,直至子集中只包含三个点而形成三角形,然后自下而上地逐级合并生成最终的三角网。
逐点插入法
Lawson提出了用逐点插入法建立D-三角网的算法思想[11]。
逐点插入算法的基本步骤是:
定义一个包含所有数据点的初始多边形;在初始多边形中建立初始三角网,然后迭代以下步骤,直至所有数据点都被处理:插入一个数据点P,在三角网中找出包含P的三角形t,把P与t 的三个顶点相连,生成三个新的三角形;三角网生长法三角网生长算法的基本步骤是:
以任一点为起始点;
找出与起始点最近的数据点相互连接形成D-三角形的一条边作为基线,按D-三角网的判别法则,即它的两个基本性质找出与基线构成D-三角形的第三点:1、任何一个Delaunay三角形的外接圆的内部不能包含其他任何点[Delaunay1934]。
2、最大化最小角原则:每两个相邻的三角形构成凸四边形的对角线,在相互交换后,六个内角的最小角不再增大。
基线的两个端点与第三点相连,成为新的基线;迭代以上两步直至所有基线都被处理。
上
述过程表明,三角网生长算法的思路是,先找出点集中相距最短的两点连接成为一条Delaunay边,然后按D-三角网的判别法则找出包含此边的D-三角形的另一端点,依次处理所有新生成的边,直至最终完成。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三角网算法(2010-11-15 10:54:01)原作:Paul Bourke / 1989.1 翻译:robter_x原文出处:.au/~pbourke/terrain/triangulate/这是一个适用于地形模型的三角网算法。
摘要(略)介绍有很多技术能够应用于表面插值,也就是说,已知一些采样点高度,求与这些采样点接近的某点的高度。
一些常用的方法是邻接插值,表面补丁,二次曲面,多边形插值,样条插值和下面将要描述的丹尼三角网(Delauney Triangulation)。
一些插值方法经常应用于经验数据的显示,例如,地形模型中的原始数据来源于调查,气象中心的气象分析数据,或有限元分析筛选出的数据等。
这篇文章讨论的技术不仅适用于地形模型,而且适用于其它方面,这个技术具有下列特点有一些地方的采样点密度高,而另一些地方的采样点密度低。
例如,在地形模型中,一般水边界的内部的采样点呈低密度分布,而在一些较复杂的地方,采样点呈高密度分布。
由于地形表面的不连续,导致采样平面上的采样点较密集。
这些可能是自然情况,如,悬岩和河岸,也可能是人工制造的不连续,如围墙。
很多平滑方法不能很好的处理这种情况,特别是那些基于多边形的函数将导致表面尖突,摆动和不稳定。
采样点经常沿着等值线分布,这是由于采样点的来源可能是等值线图或者地质调查组的实际勘探。
这是导致采样点密度不一致的另一个原因。
沿着采样点曲线有较高的采样点密度,而与采样点曲线垂直的路径,除非遇到另一条采样点曲线,否则,没有采样点。
经常需有处理大量的采样点。
对一个适用的技术来说,随着采样点数量的增加,处理采样所需的时间应该适度的增加。
典型的采样点数量一般是100~100000,对于一个自动化的取样方法来说,通常会有这么大数量的采样点。
获得的采样点一般是逐步增多的。
最初获得的采样点被分析,对于感兴趣的地方可能会增加采样密度。
很显然,在分析结果上增加一些新的采样点来进一步分析比对所有的采样点重新分析要有利。
算法应该适合在普通的台式机上运行,这些台式机不可能有大量的内存,磁盘空间和高速处理器。
这儿讨论的技术已经成功的应用于地形模型,它处理了地形数据所涉及的上述几个方面,并且能很容易的导出网格和产生等值线。
三角剖分三角剖分是指把一系列采样点划分为不覆盖的有边界的三角形区域,三角形的顶点是已知的采样点。
已被提出的三角剖分算法有很多种,而最流行的算法是径向扫描算法和用来实现丹尼三角网的Watson算法。
丹尼三角网在几何学上是与Direchlet网格密切相关的,而Direchlet网格又被称作Voronoi or Theissen网格。
这些网格把平面划分为许多多边形区域,每一个多边形区域内有一个采样点,这个采样点称作发生点,而在这个多边形区域中的所有的其它点都与发生点较接近。
把共用同一个边的邻接多边形的发生点连接起来形成丹尼三角网。
这样连接之后,三角形的边垂直平分多边形的边。
图一丹尼三角网(细线)通过9个发生点与Direchlet网格(粗线)关联,三角网的边垂直正交多边形的边。
在多边形内的点与这个多边形的发生点较接近,而与其它发生点较远。
这样的三角网有一些满足要求的特征。
三角形的三条边尽可能的相等,从而避免尖锐三角形的出现。
除了个别情况,通过这种方法得到的三角网是唯一的(即不管采样点如何排列)。
一个个别情况的例子是:四个点位于矩形的四个角上,它们只能用两种方法来进行三角剖分。
这种情况在实际数据中很少碰到,如果觉得唯一性更重要,可以对这四个点中的一个或多个点施加一些微小的位移。
有一种使用其它技术效果不太好的独特的情况,就是采样点密度不一致的区域混合在一起的情况。
基于这个方法的三角剖分很好的解决了这种情况,对高密度采样点区域划分了更多的三角形,因此,也更详细,而对低密度采样点区域划分较少的三角形,因此,没有这么详细。
不连续区域的处理是十分自然的。
不连续区域能尽可能的窄,这完全取决于采样要求,它仅仅是导致了几近直角的三角形的出现。
然而,请注意,除非有特别的操作,否则,采样平面上不应该有两个完全重叠的采样点,除非这两个采样点有不同的海拔高度。
这种情况可能发生在数字化相距很近的不连续区域时获得的离散点。
解决这个问题的方法是给这个采样点在正确的方向上施加一些微小的位移。
实现这种三角剖分的算法是十分高效的,并且对含有大量采样点的区域是十分合适的。
如果以后获得了更多的采样点,可以把这些新获得的采样点添加到已经计算好的三角网中,而不用对所有的采样点进行重新三角剖分。
这使得可以用一种高效可能的方法对一个区域进行更加详细的剖分。
形成的平面可以作为进一步形成平面的多边形使用,或者也可以用一种规则网格产生采样点。
给出包含多边形的一系列三角形是一件简单的事,那就是找到一个多边形,它在采样平面上的投影包含指定的采样点。
多边形在网格点上交点就是高度值。
另一个求网格上点的值的方法是使用Direchlet网格而不是三角网格。
这就避免了第一种方法容易产生大角度和小角度的角的情况。
显然,这更吸引人,因为对应一个区域的网格影响采样点。
等值线图可以从三角网格或分布在矩形网格中的采样点直接产生。
如果能获得网格数据,则产生平滑的表面也是比较容易的。
(译者注:本段表达不清楚,但不影响算法的描述)算法在三角剖分过程中的任何一个阶段,需要有一个存在三角网,一个新的采样点被添加到这个存在的三角网中。
通过产生一个超级三角形来对这个处理过程初始化,这个超级三角形就是人工设定的包含所有采样点的三角形。
在三角剖分过程的最后,任何与超级三角形有共享边的三角形都将从三角形集合中删除。
图2a新的采样点被添加到存在的三角网中所有的三角形,如果它的外接圆包含了新添加的采样点,则对这些三角形作标记,这些已标记的三角形的外边形成一个包围多边形。
(三角形的外接圆是指三角形的三个顶点落在圆周上)。
图2b三角形的外接圆包含新的采样点,所有这些三角形的外边形成一个包围多边形在包围多边形内的三角形都被删除,新添加的采样点与包围多边形的外边形成新的三角形。
图2c新添加的采样点与包围多边形的外边形成新的三角形每增加一个点,就会增加两个三角形。
因此,三角形的总数是采样点总数的两倍。
(这个数量包含超级三角形,当与超级三角形有共享边的三角形删除之后,三角形的总数将减少,确切的数量依赖于采样点的分布)三角剖分的算法可以用以下伪代码描述。
subroutine triangulateinput : vertex listoutput : triangle listinitialize the triangle listdetermine the supertriangleadd supertriangle vertices to the end of the vertex listadd the supertriangle to the triangle listfor each sample point in the vertex listinitialize the edge bufferfor each triangle currently in the triangle listcalculate the triangle circumcircle center and radiusif the point lies in the triangle circumcircle thenadd the three triangle edges to the edge bufferremove the triangle from the triangle listendifendfordelete all doubly specified edges from the edge bufferthis leaves the edges of the enclosing polygon onlyadd to the triangle list all triangles formed between the point and the edges of the enclosing polygonendforremove any triangles from the triangle list that use the supertriangle verticesremove the supertriangle vertices from the vertex listend能用很多方法对上述代码进行优化以使它更有效率。
最有意义的改进是对采样点按某个坐标系排序,选择的坐标系应该包含大部分的采样点。
假如采样点按X轴排序,那么,只要某个采样点与某个三角形外接圆圆心的距离的X分量大于外接圆半径,则随后的采样点可以不再考虑这个三角形了,因为随后的采样点不会落在这个三角形的外接圆内。
通过这种方法改进的算法,其随采样点增加的复杂度为O(N^1.5)。
花费的时间相对来说不依赖于采样点的分布,在自然分布的情况,以及特殊情况,如正规化,统一化,等值线和网格分布下,花费的时间至多只有25%的偏差。
算法不要求有大量的内部存储空间,算法仅仅需要一个内部逻辑型数组,这个数组用来标记不需要考虑的三角形。
假如内存足够的话,可以保存每一个产生的三角形的外接圆中心和半径来提高速度,这样避免了在新添加采样点的情况下重新计算它们。
假如能为上述和其它增加速度的方法提供足够的内存,那么花费的时间和采样点的数量基本上呈线性关系。
图3和图4是两个运用上述算法模拟出的陆地表面的例子。
图3三角剖分的结果图4从三角网获得的没有边界的透视的网格表面参考文献1.G. Petrie and T.J.M KennieTerrain modelling in Survey and Civil Engineering.Computer Aided Design, Volume 19, number 4, May 1987.2.Sibson, R.A Brief History of Natural Neighbour Interpolation.In Barnett, V. Interpreting Multivariate Data,John Wiley & Sons, New York. 19813.McCullagh, M.J.Creation of Smooth Contours Over Irregularly Distributed DataUsing Local Surface Patches.Geographical Analysis, Vol 13, number 1, January 1981.4.Akima, N..A Method of Bivariate Interpolation and Smooth Surface Fittingfor Irregularily Distributed Data Points.ACM Transactions on mathematical Software. Volume 4, number 1,19785.Barnhill, R.E., Gregory, J.A.Polynomial Interpolation to Boundary Data on TrianglesMathematics of Computation, Number 29. 19756.Holroyd, M.T., Bhattacharya, B.K.Automatic Contouring of Geophysical Data Using Bicubic SplineInterpolation.Dept. of Energy, Mines, and Resources Publications.Geological Survey of Canada, 1970.7.Yoeli, P.,Computer Executed Interpolation of Contours into Arrays ofRandomly Distributed Height Points.Cartographer Journal, Volume 14, number 2, 1977.8.Mirante A., and Weingarten N.The Radial Sweep Algorithm for Constructing TriangulatedIrregular Networks.IEEE Computer Graphics and Applications, Vol 2, No 3, 19829.S.W.Sloan, G.T.HoulsbyAn Implementation of Watson's Algorithm for Computing 2-DDelauney Triangulations.Advanced Engineering Software, Volume 6, Number 4, 198410.Green P. J., Sibson R.Computing Dirichlet Tesselations in the Plane.The Computer Journal, Number 24, 198111.Ilfick, M. H.Contouring by Use of a Triangular Mesh.Cartographic Journal, Volume 16, pp 24-28, 197912.Bourke, P.D.A Contouring Subroutine.BYTE Magazine, June, 1987(如需转载,请保留文章的完整性)。