机械原理课程设计-插床齿轮机构的设计
机械原理课程设计插床
机械原理课程设计插床一、课程目标知识目标:1. 理解并掌握插床的基本工作原理和结构组成;2. 学习并掌握插床操作的基本步骤和机械加工中的安全技术;3. 掌握运用机械原理解决实际插床操作中问题的方法。
技能目标:1. 能够正确操作插床,完成简单的金属切削加工;2. 能够根据加工要求,合理选择和安装插床刀具;3. 能够分析插床加工过程中的常见问题,并采取相应措施解决。
情感态度价值观目标:1. 培养学生对机械原理和机械加工的兴趣,激发其探索精神和创新意识;2. 增强学生的安全意识,培养其认真负责的工作态度;3. 提高学生的团队合作能力和解决问题的自信心。
课程性质:本课程为实践性较强的学科,注重理论联系实际,培养学生动手操作能力和解决实际问题的能力。
学生特点:高年级学生,具备一定的机械基础知识,具有较强的学习能力和动手能力。
教学要求:结合课本内容,注重实践操作,通过实际操作让学生深入了解插床的工作原理和操作技巧,提高学生的实际操作能力和安全意识。
在教学过程中,将课程目标分解为具体的学习成果,便于教学设计和评估。
二、教学内容1. 理论知识:- 插床的基本原理:参照课本第三章第二节,讲解插床的工作原理、分类及结构组成;- 刀具选择与安装:结合课本第四章第一节,介绍插床刀具的类型、选用原则及安装方法;- 安全技术:依据课本第十二章,阐述插床操作过程中的安全注意事项及事故预防措施。
2. 实践操作:- 插床操作步骤:按照课本第五章,让学生实际操作插床,掌握基本操作流程;- 加工工艺:结合课本第六章,教授简单零件的加工工艺,提高学生实际加工能力;- 问题分析与解决:针对实际操作过程中可能出现的问题,指导学生参照课本内容进行分析和解决。
3. 教学进度安排:- 理论部分:共计4课时,分别讲解插床原理、刀具选择与安装、安全技术;- 实践部分:共计8课时,分阶段进行插床操作、加工工艺学习和问题分析。
教学内容依据课程目标,结合课本章节,科学系统地组织,旨在确保学生掌握插床相关知识和技能。
机械原理课程设计--插床齿轮机构的设计
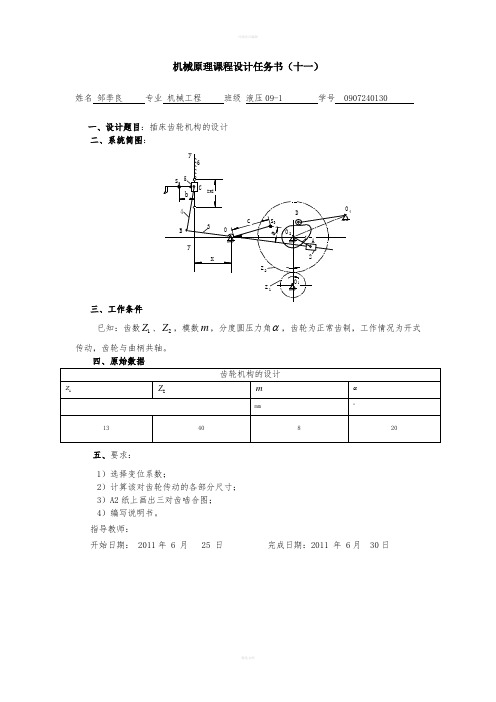
机械原理课程设计任务书(十一)姓名 邹季良 专业 机械工程 班级 液压09-1 学号 0907240130一、设计题目:插床齿轮机构的设计 二、系统简图:三、工作条件已知:齿数1Z 传动,齿轮与曲柄共轴。
四、原始数据五、要求:1)选择变位系数;2)计算该对齿轮传动的各部分尺寸; 3)A2纸上画出三对齿啮合图; 4)编写说明书。
指导教师:开始日期: 2011年 6 月 25 日 完成日期:2011 年 6月 30日1数学模型1中心距a ':2)(21z z m a +⨯= ;a '=(a/5+1)⨯5;2啮合角α':;)cos(2)()cos(21ααα⨯'⨯+='z z m实αααinv z z x x inv +++=')/()(tan 22121;3分配变位系数21x x 、;17sin 22min≈=*αah zmin 1min min 1/)(z z z h x a -=*;min 2min min 2/)(z z z h x a -=*;;αααtan 2))((2121z z inv inv x x +-'=+4齿轮基本参数:(注:下列尺寸单位为mm)齿顶高系数:0.1=*a h齿根高系数: 25.0=*c齿顶高变动系数: y x x -+=21σ分度圆直径; 11mz d = 22mz d = 基圆直径; αcos 11mz d b = αcos 22mz d b = 齿顶高: )(11σ-+=*x h m h a a)(22σ-+=*x h m h a a齿根高: )(11x c h m h a f -+=*)(22x c h m h a f -+=**齿顶圆直径: 1112a a h d d += 2222a a h d d += 齿根圆直径; 1112f f h d d -= 2222f f h d d -= 节圆直径: αα'='cos cos 11d dαα'='cos cos 22d d齿距: m p π=节圆齿距:αα'='cos cos pp基圆齿距: απcos m p b =中心距变动系数 y=(a a -')/m ; 分度圆齿厚:απtan 22155m m x s +=απtan 22166m m x s +=5 重合度:)]tan (tan )tan (tan [212211ααααπε'-+'-=a a z z)/(cos 1111a b a d d -=α)/(cos 2212a b a d d -=α一般情况应保证2.1≥ε6齿顶圆齿厚:)(2111111ααinv inv r r r s s a a a a --=)(2222222ααinv inv r r r s s a a a a --=一般取25.0≥a s7 展角:'-'=11111arccos )tan(arccosd d d d b b θ '-'=22222arccos )tan(arccosd d d d b b θ2程序框图3程序清单及运行结果#include"math.h"#include"stdio.h"#define z1 13.0#define z2 40.0#define t 20*3.14/180 /*yalijiao,unit:rad*/ #define m 8 /*moshu*/#define hax 1.0#define cx 0.25#define Zmin 17.0#define pi 3.14main( ){ int a,ai; double ti; /*niehejiao*/double x1,x2,xh;double db1,db2; /*jiyuanzhijing*/ double d1,d2; /*fenduyuanzhijing*/ double ha1,ha2; /*chidinggao*/double hf1,hf2; /*chigengao*/double df1,df2; /*chigenyuanzhijing*/ double di1,di2; /*jieyuanzhijing*/ double da1,da2; /*chidingyuanzhijing*/ double p; /*chiju*/double p1; /*jieyuanchiju*/ double pb; /*jiyuanchiju*/double S1,S2; /*chihou*/double Sb1,Sb2; /*jiyuanchihou*/double Sa1,Sa2; /*chidinghou*/double o1,o2; /*jieyuanzhanjiao*/ double e; /*chonghedu*/double y,Xmin1,Xmin2; /*y shifenlixishu*/ double cdb;double cgm;/*chidingaobiandongxishu*/int j,i;a=m*(z1+z2)/2;printf("a=%d \n",a);i=a/5;ai=(i+1)*5;printf("ai=%d (mm)\n",ai);ti=acos(a*cos(t)/ai);printf("ti=%4.3f (rad)\n",ti);cdb=z2/z1;printf("\n cdb=%5.3f \n",cdb);y=0.5*(z1+z2)*(cos(t)/cos(ti)-1);printf("y=%5.3f \n",y);d1=m*z1;d2=m*z2;printf("d1=%5.3f,d2=%5.3f (mm)\n",d1,d2);db1=m*z1*cos(t);db2=m*z2*cos(t);printf("db1=%5.3f,db2=%5.3%f (mm)\n",db1,db2); di1=d1*cos(t)/cos(ti);di2=d2*cos(t)/cos(ti);printf("di1=%5.3f,di2=%5.3f (mm)\n",di1,di2); p=m*pi;printf("p=%5.3f (mm)\n",p);p1=p*cos(t)/cos(ti);pb=pi*m*cos(t);printf("p1=%5.3f,pb=%5.3f (mm)\n",p,p1,pb); Xmin1=hax*(Zmin-z1)/Zmin;printf("Xmin1=%3.4f (mm)\n",Xmin1);Xmin2=hax*(Zmin-z2)/Zmin;printf("Xmin2=%3.4f (mm)\n",Xmin2);xh=0.5*(tan(ti)-ti-(tan(t)-t))*(z1+z2)/tan(t);printf("xh=x1+x2=%5.3f \n",xh);for(j=0;j<10;j++){x1=Xmin1+0.04*j;x2=xh-x1;if(x2<Xmin2)break;cgm=x1+x2-y;ha1=m*(hax+x1-cgm);ha2=m*(hax+x2-cgm);hf1=(hax+cx-x1)*m;hf2=(hax+cx-x2)*m;da1=d1+2*ha1;da2=d2+2*ha2;df1=d1-2*hf1;df2=d2-2*hf2;S1=0.5*pi*m+2*x1*m*tan(t);S2=0.5*pi*m+2*x2*m*tan(t);Sb1=S1*db1/d1-db1*(tan(acos(db1/db1))-acos(db1/db1)-(ta n(t)-t));Sb2=S2*db2/d2-db2*(tan(acos(db2/db2))-acos(db2/db2)-(tan(t)-t));Sa1=S1*da1/d1-da1*(tan(acos(db1/da1))-acos(db1/da1)-(ta n(t)-t));Sa2=S2*db2/d2-da2*(tan(acos(db2/da2))-acos(db2/da2)-(ta n(t)-t));o1=tan(acos(db1/di1))-acos(db1/di1);o2=tan(acos(db2/di2))-acos(db2/di2);e=(z1*(tan(acos(db1/da1))-tan(ti))+z2*(tan(acos(db2/da2 ))-tan(ti)))/(2*pi);if((S1>cx*m)&&(S2>cx*m)&&(Sb1>cx*m)&&(Sb2>cx*m)&&(Sa1>cx*m)&&(Sa2>cx*m)&&(e>1.2)){ printf("x1=%5.3f,x2=%5.3f (mm)\n",x1,x2);printf("cgm=%5.3f \n",cgm);printf("ha1=%5.3f,ha2=%5.3f(mm)\n",ha1,ha2);printf("hf1=%5.3f,hf2=%5.3f(mm)\n",hf1,hf2);printf("da1=%5.3f,da2=%5.3f(mm)\n",da1,da2);printf("df1=%5.3f,df2=%5.3f (mm)\n",df1,df2);printf("S1=%5.3f,S2=%5.3f (mm)\n",S1,S2);printf("Sb1=%5.3f,Sb2=%5.3f (mm)\n",Sb1,Sb2); printf("Sa1=%5.3f,Sa2=%5.3f (mm)\n",Sa1,Sa2); printf("o1=%6.5f,o2=%6.5f (rad)\n",o1,o2); printf("e=%5.3f \n",e);printf("db1=%5.3f,db2=%5.3f (mm)\n",db1,db2);}}}运行结果ai=215 (mm)ti=0.385 (rad)df1=92.885, df2=297.421 (mm)s1=15.792, s2=11.622 (mm)sb1=16.295, sb2=15.397 (mm)o1=0.02029, o2=0.02029 (mm)e=1.381db1=97.734, db2=300.721 (mm)x1=0.595, x2=-0.201 (mm)cgm=0.019ha1=12.609, ha2=6.238 (mm)hf1=5.238, hf2=11.609 (mm)da1=129.219, da2=332.475 (mm)df1=93.525, df2=296.781 (mm)s1=16.025, s2=11.389 (mm)sb1=16.514, sb2=15.178 (mm)sa1=2.215, sa2=5.372 (mm)o1=0.02029, o2=0.02029e=1.370db1=97.734, db2=300.721 (mm)4 设计总结一周的课程设计就要结束了,通过这短短的一周,我学到了很多,首先是对插床齿轮的进一步了解,还有增强了自己动手的实践能力,很多很多,真是受益匪浅。
插床的机械原理课程设计

插床的机械原理课程设计一、课程目标知识目标:1. 学生能理解插床的基本结构组成及其工作原理;2. 学生能掌握插床的主要机械部件名称及其功能;3. 学生能了解插床在制造业中的应用和重要性。
技能目标:1. 学生能够运用所学知识,分析并解释插床机械运动的过程;2. 学生能够通过实际操作,掌握插床的安全操作规程和简单维护方法;3. 学生能够通过小组合作,设计并制作简单的插床模型,培养动手能力和团队协作能力。
情感态度价值观目标:1. 学生能够培养对机械原理学习的兴趣,增强探索精神和创新意识;2. 学生能够树立安全意识,养成严谨的科学态度和良好的操作习惯;3. 学生能够认识到插床在国民经济中的地位,培养爱国主义情怀和民族自豪感。
课程性质分析:本课程为机械原理实践课,注重理论联系实际,通过讲授、演示、实践等教学手段,使学生掌握插床的基本原理和操作技能。
学生特点分析:学生为初中年级,具备一定的物理知识和动手能力,对新鲜事物充满好奇,但注意力集中时间有限,需要通过趣味性和实践性强的教学活动激发学习兴趣。
教学要求:结合学生特点,注重启发式教学,引导学生主动参与,提高课堂互动性。
强调实践操作,培养学生动手能力,同时关注安全意识和团队协作能力的培养。
通过教学评估,确保课程目标的实现。
二、教学内容1. 插床概述- 插床的定义、分类及用途;- 插床在机械加工中的地位与作用。
2. 插床的结构与工作原理- 插床的主要部件及其功能;- 插床的工作原理及运动分析。
3. 插床的操作与维护- 插床的操作规程及注意事项;- 插床的日常维护与保养。
4. 插床的应用案例- 插床在实际加工中的应用实例;- 插床加工零件的工艺流程。
5. 插床模型设计与制作- 小组合作设计插床模型;- 动手制作插床模型,并进行调试。
教学大纲安排:第一课时:插床概述及用途;第二课时:插床结构与工作原理;第三课时:插床操作与维护;第四课时:插床应用案例分析与讨论;第五课时:插床模型设计与制作。
毕业设计_机械原理课程设计插床主体机构的设计

《机械原理课程设计》说明书课程设计题目插床主体机构的设计学院机械工程学院专业机械设计制造及其自动化学生姓名班级机制本(2)班学号指导教师起止日期 2015年6月15日- 19日目录第一章插床主体机构的设计设计任务书 (2)1.1 工作原理 (2)1.2 设计数据表 (2)1.3 设计要求与任务 (3)1.4 技术要求 (3)第二章设计计算过程 (4)2.1 导杆机构分析与设计 (4)2.1.1机构的运动尺寸 (4)2.1.2 导杆机构的运动分析 (5)2.1.3 绘制所设计的机构运动简图 (5)2.2 凸轮机构设计 (8)2.2.1 确定凸轮机构的基本尺寸 (8)2.2.2 凸轮廓线的绘制 (11)2.3 齿轮机构设计 (12)2.3.1 确定齿轮机构的基本尺寸 (12)2.3.2绘制齿轮传动简图 (14)第三章设计体会 (15)第四章主要参考文献 (15)第五章附件 (17)5.1 附件1 导杆机构运动简图及速度加速度多边形 (17)5.2 附件2凸轮廓线的绘制图 (17)5.3 附件3齿轮传动简图 (17)第一章 插床主体机构的设计设计任务书1.1 工作原理如图所示为插床结构简图及阻力线图。
插床主要由齿轮机构、导杆机构凸轮机构等组成,如图1-1所示。
电动机经过减速装置(图中只画出齿轮21,z z ),使曲柄1转动,再通过导杆机构1-2-3-4-5-6,使装有刀具的滑块沿导路y-y 作往复运动,以实现刀具切削运动。
为了缩短空程时间,提高生产率,要求刀具具有急回运动。
刀具与工作台之间的进给运动,是由固结于轴2O 上的凸轮驱动摆动从动杆D O 4和其他有关机构(图中未画出)来完成的图1-1 插床结构简图及阻力线图1.2设计数据表表1.1导杆机构的设计及运动分析表1.2 凸轮机构的设计表1.3 齿轮机构的设计1.3 设计要求与任务根据已知条件,要求完成如下设计任务:(1)、导杆机构的设计及运动分析。
机械原理课程设计—插床机构说明书

第二章插床主体机构尺寸综合设计之巴公井开创作机构简图如下:H=100mm,行程比系数K=2,YY轴的距离图 1 极限位置。
由几何关系知,,于是可得,即曲柄长度为2.图 2 杆BC,由图 2。
形。
又有几何关系知道四边平行四边形,那么又上面讨论知等边三角形,于是有又已知,于是可得到即杆的100mm。
YY轴的距离的确定图 32O 到YY 轴的距离有图我们看到,YY 轴由3311y y y y 移动到过程中,同一点的压力角先减小,后又增大,那么在中间某处必有一个最佳位置,使得每个位置的压力角最佳。
考虑两个位置:1当YY 轴与圆弧12B B 刚相接触时,即图3中左边的那条点化线,与圆弧12B B 相切与B1点时,当B 点转到12,B B ,将会出现最大压力角。
12B B 重合时,即图中右边的那条点化线时,B点转到B1时将出现最大压力角为了使每一点的压力角都为最佳,我们可以选取YY 轴通过CB1中点(C 点为12B O 与12B B 得交点)。
又几何关系知道:由上面的讨论容易知道02230=∠C O B,再代入其他数据,得:B 1综上,插床主体设计所要求的尺寸已经设计完成。
选取1:1 的是比例尺,画出图形如图纸一上机构简图所示。
第三章插床切削主体机构及函数曲线分析主体机构图见第一张图。
度。
规定位移,速度,加速度向下为正,插刀处于上极限位置时位移为0.(1)位移在1:1 的基础上,量的位移为79.5mm。
,即曲柄转过175°。
(2)速度直,由理论力学中分歧构件重合点地方法可得上与A AOB上与AAOB上与A点重合的速度。
BC YY轴平行,有理论力学同一构件分歧点的方法可得:C C点相对于B点转动速度,B点速度。
又B点是杆件3 上的一点,,杆件3B点和杆件与A则可到由已知可得,规定选取比例尺12mm,于是,可得即曲柄转过175°时,插刀的速度为0.174m/s。
(3)加速度由理论力学知识可得矢量方程:其中,是滑块上与A点重合点的加速度,科氏加速度,(其中q是C点相对于B点转动的速度,方向过由C指向B C点相对于B点转动的切向加速度,大小位置,方向垂直BC。
机械原理课程设计—插床机构说明书
机械原理课程设计—插床机构说明书第二章 插床主体机构尺寸综合设计机构简图如下:已知21O O =150mm ,1/2 BO BC ,行程H=100mm ,行程比系数K=2,根据以上信息确定曲柄,1A O 2,BO BC 长度,以及2O 到YY 轴的距离 1.A O 1长度的确定图 1 极限位置由)180/()180(00θθ-+=K ,得极为夹角:060=θ,首先做出曲柄的运动轨迹,以1O 为圆心,A O 1为半径做圆,随着曲柄的转动,有图知道,当A O 2转到12A O ,于圆相切于上面时,刀具处于下极限位置;当A O 2转到22A O ,与圆相切于下面时,刀具处于上极限位置。
于是可得到12A O 与22A O 得夹角即为极为夹角060=θ。
由几何关系知,212211O O A O O A ∠=∠,于是可得,021221160=∠=∠O O A O O A 。
由几何关系可得:2111cos O O A O ∙=θ代入数据,21O O =150mm ,060=θ,得mm A O 751=即曲柄长度为75mm 2. 杆2BO BC 、的长度的确定图 2 杆BC ,BO 2长度确定由图2 知道,刀具处于上极限位置2C 和下极限位置1C 时,21C C 长度即为最大行程H=100mm ,即有21C C =100mm 。
在确定曲柄长度过程中,我们得到021221160=∠=∠O O A O O A ,那么可得到022160=∠B O B ,那么可知道三角形221O B B ∆等边三角形。
又有几何关系知道四边形1221C C B B 是平行四边形,那么1212C C B B =,又上面讨论知221O B B ∆为等边三角形,于是有1221B B O B =,那么可得到mm O B 10022=,即mm BO 1002=又已知1/2=BO BC ,于是可得到mmBO BC 1002== 即杆2,BO BC 的100m m 。
机械原理课程设计插床机构设计
深航北方科技学院课程名称机械原理课程设计插床机构设计题目名称插床机构设计学生学院机械工程系专业班级学号学生姓名指导教师一设计任务书 (1)1、工作原理 (1)2、设计数据 (2)二参数设计 (3)1.倒杆机构的方案选型 (3)(1)方案I (3)(2)方案II (3)(3)方案III (4)2、导杆机构分析与设计 (4)(1)导杆机构尺寸计算 (4)(2)导杆在1位置的运动分析 (5)1)速度分析 (5)3)加速度分析 (6)(2)凸轮机构设计 (7)(1) 确定凸轮机构的基本尺寸 (7)(2) 凸轮廓线的绘制 (9)(4)齿轮的设计计算 (11)1)设计原理 (11)2)小齿轮参数计算 (11)3)大齿轮参数计算 (11)三小结 (13)一设计任务书1、工作原理插床机械系统的执行机构主要是由导杆机构和凸轮机构组成。
图1.1为其参考示意图,电动机经过减速传动装置(皮带和齿轮传动)带动曲柄3转动,再通过导杆机构使装有刀具的滑块5沿导路y—y作往复运动,以实现刀具的切削运动。
刀具向下运动时切削,在切削行程H中,前后各有一段0.05H的空刀距离,工作阻力F为常数;刀具向上运动时为空回行程,无阻力。
为了缩短回程时间,提高生产率,要求刀具具有急回运动。
刀具与工作台之间的进给运动,是由固结于轴O2上的凸轮驱动摆动从动件DOl8和其它有关机构(图中未画出)来完成的。
图1.1 插床工作原理图2、设计数据二 参数设计1.倒杆机构的方案选型(1)方案I该方案如图2—1由两个四杆机构组成。
使b>a, 构件1、2、3、6便构成摆动导杆机构,基本参数为b/a=λ。
构件3、4、5、6构成摇杆滑块机构。
图2—1方案特点如下:1).是一种平面连杆机构,结构简单,加工方便,能承受较大载荷。
2).具有急回作用,其行程速比系数00(180)/(180)k θθ=+-,而arcsin(1/)θλ=。
只要正确选择λ,即可满足行程速比系数k 的要求。
机械原理课程设计说明书 插床机构
一 插床机构的设计与运动分析1.插床机构简介与设计数据插床主要由齿轮机构、导杆机构和凸轮机构等组成,如图2-1,a 所示。
电动机经过减速装置(图中只画出齿轮1z 、2z )使曲柄1转动,再通过导杆机构1-2-3-4-5-6,使装有刀具的滑块沿导路y-y 作往复运动,以实现刀具切削运动。
为了缩短空程时间,提高生产率,要求刀具有急回运动。
刀具与工作台之间的进给运动,是由固结于轴2O 上的凸轮驱动摆动从动杆D O 4和其他有关机构来完成的。
设计数据表 设计内容 导杆机构的设计及运动分析符号 1n K HB O BCl l 3 32O O la b c单位 min r mm mm数据 652120116055551251.设计内容和步骤已知 行程速度变化系数(行程速比系数)K ,滑块5的冲程H ,中心距32O O l ,比值BO BCl l 3,各构件重心S 的位置,曲柄每分钟转数 1n 。
要求 设计导杆机构,作机构两个位置的速度多边行和加速度多边形,做滑块的运动线图。
步骤1)设计导杆机构。
按已知条件确定导杆机构的各未知参数。
其中滑块5的导路y y -的位置可根据连杆4传力给滑块5的最有利条件来确定,即y y -应位于B 点所画圆弧高的平分线上。
2)作机构运动简图。
选取长度比例尺)(mm m l μ,按表22-所分配的两个曲柄位置作出机构运动简图,其中一个位置用粗线画出。
曲柄位置的作法如图22-;取滑块5在上极限时所对应的曲柄位置为起始位置1 ,按转向将曲柄圆周十二等分,得12个曲柄位置,显然位置9对应于滑块5处于下极限时的位置。
再作出开始切削和终止切削所对应的'1和'8两个位置。
3)作速度、加速度多边形。
选取速度比例尺⎪⎭⎫⎝⎛mm s m v μ和加速度比例尺⎪⎪⎭⎫ ⎝⎛mm s m a 2μ,用相应运动图解法作该两个位置的速度多边形和加速度多边形,并将其结果列入下表:项目位置1ω2A v23A A v 3A v CB v C v 3S vω大小 方向 106.28 0.471 0. 14 0.450 0.04 0.2 0.26 2.1逆时针单位 s 1 s m s 1项目 位置 2A a K A A a23 n A a 3t A a 3n CB a C a 3S a ε2.96 0.6 0.96 0.04 0.016 0.04 0.54单位2s m 21s4)作滑块的运动线图。
机械原理课设插床
机械原理课程设计说明书题目:插床机构姓名:班级:学号:指导教师:成绩:完成时间:目录1.1机构简介 (2)1.2设计任务 (2)1.3原始数据 (3)2.1机构运动方案设计 (3)2.2电动机、齿轮传动机构方案 (4)2.3总体方案图 (6)3.1电动机的选择 (7)3.2传动比分配 (8)3.3齿轮机构设计 (8)3.4主机构的设计 (10)3.5主机构的运动分析 (12)3.6主机构的受力分析 (15)3.7主机构的速度波动 (21)4.1课程设计小结 (23)参文考献 (25)一、机构简介与设计数据1、机构简介插床是一种用于工件表面切削加工的机床。
插床主要由连杆机构、凸轮机构和齿轮机构等组成,如图所示。
电动机经过齿轮机构减速使曲柄1转动,再通过连杆机构1—2—3—4—5—6,使装有刀具的滑块5沿导路y —y 作往复运动,以实现刀具的切削运动。
刀具与工作台之间的进给运动,是由固结于轴O 2 上的凸轮驱动摆动从动件O 4D 和其他有关机构(图中未画出)来完成。
为了缩短空回行程时间,提高生产率,要求刀具有急回运动。
2、设计数据二、设计内容1.导杆机构的设计及运动分析设计导杆机构,作机构的运动简图,并作机构两个位置的速度、加速度多边形以及刨头的运动线图,作滑块的运动线图。
以上内容与后面动态静力分析共画在0号图纸(图纸格式与机械制图要求相同,包括边框、标题栏等)上。
整理说明书。
2.导杆机构的动态静力分析确定机构一个位置的各运动副反力及应加于曲柄上的平衡力矩。
作图部分画在运动分析的图样上。
整理说明书。
3.凸轮机构设计绘制从动杆的运动线图,画出凸轮实际轮廓曲线。
以上内容作在3号图纸上。
整理说明书。
4.齿轮机构设计做标准齿轮,计算该对齿轮传动的各部分尺寸,以3号图纸绘制齿轮传动的啮合图。
整理说明书。
插床主体机构尺寸综合设计......................................................................................................机构简图如下:• cos ∠ B 2 O 2 C ) / 2由上 面的讨 论容易 知道 ∠ B 2 O 2 C = 30 度 ,再 代入其 他数据 ,得:x = 93 . 3 mm ,即 O 2 到 YY 轴的 距离为 93.3mm 三、插床导杆机构的速度分析位置1速度加速度分析1)求导杆3上与铰链中心A 重合的点3A 的速度3A V滑块2——动参考系,3A ——动点3A V = 2A V+ 23A A V 方向: ⊥A O 3 ⊥A O 2 ∥A O 3 大小: ? 11ωl ?式中:2A V =12ωA l O =6.28×0.075(m/s )=0.471m/s取速度比例尺v u =0.01(mmsm /),作出速度图32a pa ,进而可得导杆3的角速度大小:3ω=33r V A =33r pa u v =0.374/0.20157=1.855(rad/s) 及其转向为顺时针。
插床的机械原理课程设计
插床的机械原理课程设计一、课程目标知识目标:1. 学生能够理解并描述插床的基本结构及其工作原理;2. 学生能够掌握插床操作的基本步骤和注意事项;3. 学生能够了解并解释插床加工过程中常见的问题及解决办法。
技能目标:1. 学生能够正确操作插床,完成给定零件的加工;2. 学生能够运用所学知识解决实际操作中遇到的问题;3. 学生能够通过实际操作,提高动手能力和团队协作能力。
情感态度价值观目标:1. 学生能够认识到机械加工在工业生产中的重要性,培养对机械专业的热爱;2. 学生能够养成严谨、细致的工作态度,提高安全意识和责任感;3. 学生能够在团队协作中学会沟通与交流,培养合作精神。
课程性质:本课程为机械加工技术课程,旨在让学生掌握插床的机械原理和操作技能,提高学生的实际操作能力。
学生特点:学生为初中二年级学生,具有一定的机械基础知识,好奇心强,动手能力强,但安全意识相对较弱。
教学要求:结合学生特点,注重理论知识与实际操作的紧密结合,强调操作安全,培养学生的动手能力和团队协作能力。
通过本课程的学习,使学生能够达到上述课程目标,为今后的学习和工作打下坚实基础。
二、教学内容1. 插床的基本结构- 插床的组成部分及其功能- 各部件的相互关系及作用2. 插床的工作原理- 插削加工的基本概念- 插床的运动原理及切削过程3. 插床操作基本步骤与注意事项- 开机、关机流程- 零件装夹、刀具选择与安装- 插削参数的设置及调整- 操作过程中的安全注意事项4. 插床加工常见问题及解决办法- 零件加工误差的原因分析- 刀具磨损、断裂的处理方法- 机床故障的排查与解决5. 实践操作- 完成简单零件的插削加工- 操作过程中的安全防护与协作教学内容安排与进度:第一课时:介绍插床的基本结构及各部件功能第二课时:讲解插床的工作原理及插削加工基本概念第三课时:学习插床操作基本步骤和注意事项第四课时:分析插床加工过程中常见问题及解决办法第五课时:实践操作,完成简单零件的插削加工教材章节关联:本教学内容与教材第三章“机床及其应用”中的第三节“插床及其应用”相关联,涵盖了该节内容的核心知识点,为学生提供了系统的学习指导。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
工程技术大学课程设计说明书课程名称:机械原理课程设计院系:机械工程学院专业班级:机自17-4 姓名:海鹏学号: 1707010430总评成绩及评语评语:□经考核,该同学基本完成了课程设计的全部任务,达到任务书的训练要求。
□经考核,该同学在课程设计期间未完成设计任务。
成绩:根据该同学完成任务情况,结合课程设计期间表现,经教研室答辩小组综合审定,该同学机械原理课程设计成绩为教师签名机械原理课程设计任务书(十一)海鹏 专业 机自 班级 17-4 学号 1707010430一、设计题目:插床齿轮机构的设计 二、系统简图:三、工作条件已知:齿数1Z 传动,齿轮与曲柄共轴。
四、原始数据五、要求:1)依据题目条件和不根切条件,计算符合的变位系数(至少5组); 2)选定一组变位系数,计算该对齿轮传动的各部分尺寸;3)在A3纸上画出齿轮啮合图;要求:①按设计尺寸画;②作图体现:极限啮合点1N 、2N ,啮合角α' ,四个圆b d d a d f d 和节圆d ' ,12B B ,每个齿轮画出3条渐开线(2同1异),每条渐开线找出起始点(b b b P S e =+ )齿顶圆齿厚(1a s 2a s )。
4)编写说明书。
指导教师:席本强 曲辉开始日期: 2019 年 7 月 10 日 完成日期: 2019 年 7 月 17 日1数学模型1中心距a ':2)(21z z m a +⨯= ;a '=(a/5+1)⨯5;2啮合角α':;)cos(2)()cos(21ααα⨯'⨯+='z z m实αααinv z z x x inv +++=')/()(tan 22121;3分配变位系数21x x 、;17sin 22min≈=*αah zmin 1min min 1/)(z z z h x a -=*;min 2min min 2/)(z z z h x a -=*;;αααtan 2))((2121z z inv inv x x +-'=+4齿轮基本参数:(注:下列尺寸单位为mm )齿顶高系数:0.1=*a h齿根高系数: 25.0=*c齿顶高变动系数: y x x -+=21σ分度圆直径; 11mz d = 22mz d =基圆直径; αcos 11mz d b = αcos 22mz d b =齿顶高: )(11σ-+=*x h m h a a)(22σ-+=*x h m h a a 齿根高: )(11x c h m h a f -+=*)(22x c h m h a f -+=**齿顶圆直径: 1112a a h d d += 2222a a h d d +=齿根圆直径; 1112f f h d d -= 2222f f h d d -=节圆直径: αα'='cos cos 11d dαα'='cos cos 22d d齿距: m p π= 节圆齿距: αα'='cos cos pp基圆齿距: απcos m p b =中心距变动系数 y=(a a -')/m ; 分度圆齿厚:απtan 22155m m x s +=απtan 22166m m x s +=5 重合度:)]tan (tan )tan (tan [212211ααααπε'-+'-=a a z z)/(cos 1111a b a d d -=α)/(cos 2212a b a d d -=α一般情况应保证2.1≥ε6齿顶圆齿厚:)(2111111ααinv inv r r r s s a a a a --=)(2222222ααinv inv r r r s s a a a a --=一般取25.0≥a s7 展角:'-'=11111arccos )tan(arccosd d d d b b θ '-'=22222arccos )tan(arccosd d d d b b θ2程序框图3程序清单及运行结果#include"math.h"#include"stdio.h"#define z1 13.0#define z2 40.0#define t 20*3.14/180 /*yalijiao,unit:rad*/#define m 8 /*moshu*/#define hax 1.0#define cx 0.25#define Zmin 17.0#define pi 3.14main( ){ int a,ai; double ti; /*niehejiao*/double x1,x2,xh;double db1,db2; /*jiyuanzhijing*/double d1,d2; /*fenduyuanzhijing*/ double ha1,ha2; /*chidinggao*/double hf1,hf2; /*chigengao*/double df1,df2; /*chigenyuanzhijing*/ double di1,di2; /*jieyuanzhijing*/double da1,da2; /*chidingyuanzhijing*/double p; /*chiju*/double p1; /*jieyuanchiju*/double pb; /*jiyuanchiju*/double S1,S2; /*chihou*/double Sb1,Sb2; /*jiyuanchihou*/double Sa1,Sa2; /*chidinghou*/double o1,o2; /*jieyuanzhanjiao*/double e; /*chonghedu*/double y,Xmin1,Xmin2; /*y shifenlixishu*/double cdb;double cgm; /*chidingaobiandongxishu*/ int j,i;a=m*(z1+z2)/2;printf("a=%d \n",a);i=a/5;ai=(i+1)*5;printf("ai=%d (mm)\n",ai);ti=acos(a*cos(t)/ai);printf("ti=%4.3f (rad)\n",ti);cdb=z2/z1;printf("\n cdb=%5.3f \n",cdb);y=0.5*(z1+z2)*(cos(t)/cos(ti)-1);printf("y=%5.3f \n",y);d1=m*z1;d2=m*z2;printf("d1=%5.3f,d2=%5.3f (mm)\n",d1,d2);db1=m*z1*cos(t);db2=m*z2*cos(t);printf("db1=%5.3f,db2=%5.3%f (mm)\n",db1,db2); di1=d1*cos(t)/cos(ti);di2=d2*cos(t)/cos(ti);printf("di1=%5.3f,di2=%5.3f (mm)\n",di1,di2);p=m*pi;printf("p=%5.3f (mm)\n",p);p1=p*cos(t)/cos(ti);pb=pi*m*cos(t);printf("p1=%5.3f,pb=%5.3f (mm)\n",p,p1,pb); Xmin1=hax*(Zmin-z1)/Zmin;printf("Xmin1=%3.4f (mm)\n",Xmin1);Xmin2=hax*(Zmin-z2)/Zmin;printf("Xmin2=%3.4f (mm)\n",Xmin2);xh=0.5*(tan(ti)-ti-(tan(t)-t))*(z1+z2)/tan(t);printf("xh=x1+x2=%5.3f \n",xh);for(j=0;j<10;j++){x1=Xmin1+0.04*j;x2=xh-x1;if(x2<Xmin2)break;cgm=x1+x2-y;ha1=m*(hax+x1-cgm);ha2=m*(hax+x2-cgm);hf1=(hax+cx-x1)*m;hf2=(hax+cx-x2)*m;da1=d1+2*ha1;da2=d2+2*ha2;df1=d1-2*hf1;df2=d2-2*hf2;S1=0.5*pi*m+2*x1*m*tan(t);S2=0.5*pi*m+2*x2*m*tan(t);Sb1=S1*db1/d1-db1*(tan(acos(db1/db1))-acos(db1/db1)-(tan(t)-t)); Sb2=S2*db2/d2-db2*(tan(acos(db2/db2))-acos(db2/db2)-(tan(t)-t)); Sa1=S1*da1/d1-da1*(tan(acos(db1/da1))-acos(db1/da1)-(tan(t)-t)); Sa2=S2*db2/d2-da2*(tan(acos(db2/da2))-acos(db2/da2)-(tan(t)-t)); o1=tan(acos(db1/di1))-acos(db1/di1);o2=tan(acos(db2/di2))-acos(db2/di2);e=(z1*(tan(acos(db1/da1))-tan(ti))+z2*(tan(acos(db2/da2))-tan(ti)) )/(2*pi);if((S1>cx*m)&&(S2>cx*m)&&(Sb1>cx*m)&&(Sb2>cx* m)&&(Sa1>cx*m)&&(Sa2>cx*m)&&(e>1.2)){ printf("x1=%5.3f,x2=%5.3f (mm)\n",x1,x2);printf("cgm=%5.3f \n",cgm);printf("ha1=%5.3f,ha2=%5.3f (mm)\n",ha1,ha2); printf("hf1=%5.3f,hf2=%5.3f (mm)\n",hf1,hf2); printf("da1=%5.3f,da2=%5.3f (mm)\n",da1,da2); printf("df1=%5.3f,df2=%5.3f (mm)\n",df1,df2); printf("S1=%5.3f,S2=%5.3f (mm)\n",S1,S2); printf("Sb1=%5.3f,Sb2=%5.3f (mm)\n",Sb1,Sb2); printf("Sa1=%5.3f,Sa2=%5.3f (mm)\n",Sa1,Sa2); printf("o1=%6.5f,o2=%6.5f (rad)\n",o1,o2); printf("e=%5.3f \n",e);printf("db1=%5.3f,db2=%5.3f (mm)\n",db1,db2);}}}运行结果ai=215 (mm)ti=0.385 (rad)df1=92.885, df2=297.421 (mm) s1=15.792, s2=11.622 (mm)sb1=16.295, sb2=15.397 (mm)o1=0.02029, o2=0.02029 (mm)e=1.381db1=97.734, db2=300.721 (mm) x1=0.595, x2=-0.201 (mm)cgm=0.019ha1=12.609, ha2=6.238 (mm)hf1=5.238, hf2=11.609 (mm)da1=129.219, da2=332.475 (mm) df1=93.525, df2=296.781 (mm) s1=16.025, s2=11.389 (mm)sb1=16.514, sb2=15.178 (mm)sa1=2.215, sa2=5.372 (mm)o1=0.02029, o2=0.02029e=1.370db1=97.734, db2=300.721 (mm)4 设计总结一周的课程设计就要结束了,通过这短短的一周,我学到了很多,首先是对插床齿轮的进一步了解,还有增强了自己动手的实践能力,很多很多,真是受益匪浅。