机械振动二自由度
机械振动二自由度讲解
动能、势能和能量耗散函 数均是非负的。也就是说, 对任意的位移,任意的速 度,必然有
ET
1 {x'}T [M ]{x'} 0 2
U 1 {x}T [K ]{x} 0
2
D 1 {x'}T [C]{x'} 0
2
由此可知,质量矩阵、阻尼矩阵和刚度矩阵均是正定或半正定矩阵。一般说来,
工程振动问题中遇到的质量矩阵一般都是正定矩阵。对于静定和超静定结构,刚度矩
U
1 2
k1x12
1 2
k2 (x2
x1 ) 2
1 2
k3 x22
1 2 {x1,
x2}T
k1 k2
k2
k2 k2 k3
xx12
1 2
{x}T
[K
]{x}
系统的能量 耗散函数
D
1 2
c1x'12
1 2
c2
(x'2
x'1
)2
1 2
c3 x'22
U
1 2
[k1
y
2 A
k2( yA
Lq )2 ]
1 2
{
y
A
,q
}k1k2 Lk2
mL1 mL12
Ic
y'
q
A
'
k2L k2 L2
yA
q
yA和q下的运动微分方程为
示例:
10二自由度系统的各阶固有频率与主振型

实验10 二自由度系统的各阶固有频率与主振型一、实验目的1.学会用共振法确定二自由度系统的各阶固有频率。
2.观察二自由度系统的各阶振型。
3.将实验测得的各阶固有频率和振型与理论结果进行比较。
二、实验装置与仪器1.机械振动与控制实验台。
2.磁电式非接触激振器(JZF-1型)。
3.激振信号源(SJF-3型)。
4.重锤两个(1kg 与2kg 各一个),磁性表座,两质量块的钢丝绳一根,螺丝刀。
图4-12-1 二自由度横向振动系统的装置简图三、实验原理二自由度系统的装置示意如图4-12-1所示,两个质量块、m 的质量均为m (集中质量),钢丝绳的张力可以通过改变重锤的重量来调节,从而构成一个弦上有集中质量的横向振动系统,不计钢丝绳的质量,便将无限自由度系统简化为二自由度系统的模型,具有两个固有频率。
在激振力作用下,系统发生振动,该振动是两个主振型的叠加。
当激振频率等于某一阶固有频率时,系统的振动形态就是该阶固有频率的主振型,而另一阶振型的影响可以忽略不计。
A mB 在测定系统的固有频率时,需要连续调节激振频率,使系统出现某阶振型且振幅值达到最大,这时的激振频率就是该阶的固有频率。
由振动理论,两个集中质量的运动系统可由以下方程描述:0=+KX XM &&其中质量矩阵为:mm 00=M 刚度矩阵为:21123/6/3/3/6−−=−−=L T L T L T L T L T K 位移矩阵为:21x x X =系统的一阶固有频率为:mLT 31=ω 或者 mL T f 3π211= 系统的二阶固有频率为:mLT 92=ω 或者 mL T f 9π212= 在以上各式中, =0.0045kg 为集中质量, m T 为弦丝张力(N ), =L 0.625m 为弦丝长度。
各阶主振型分别为()111++=A 以及()112−+=A ,参见图4-12-2。
(a ) (b )图4-12-2 二自由度系统的一阶主振型(a )和二阶主振型(b )四、实验方法1.将磁电式非接触激振器接入激振信号源输出端,把激振器对准其中任一个质量块,保持一定的间隙(8—10mm ),使得振动时激振器与质量块不会发生碰撞。
《机械振动》张义民—第4章第1、2节ppt
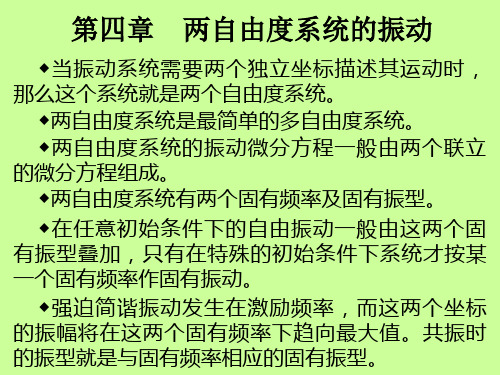
◆当振动系统需要两个独立坐标描述其运动时, 那么这个系统就是两个自由度系统。
◆两自由度系统是最简单的多自由度系统。 ◆两自由度系统的振动微分方程一般由两个联立 的微分方程组成。 ◆两自由度系统有两个固有频率及固有振型。
◆在任意初始条件下的自由振动一般由这两个固 有振型叠加,只有在特殊的初始条件下系统才按某 一个固有频率作固有振动。
大象体积庞大,走起路来 更是别具一格,四只脚移动 时分别各自相差90度的位移 差。没有一只脚做的是相同 位移的移动。
◆四只脚动物可以看作是“四个振动体耦合在一起的 系统”吗?事实上,四个振动体组成的系统的基本运动 模式,确实与所提到的那四种走路方式一模一样。
◆可是动物们为什么会按照耦合振动体的方式来行走 呢?虽说现在关于这个问题还没有定论。生物学家们认 为,掌管运动的脑神经网(由数突连接起来的神经细胞) 看起来更接近“耦合振动体”一些。有推测认为,正是 脑神经网的动力学特性,使得动物走起路来才会表现出 振动体的特点。
1998年匈牙利的物理学家塔 马斯·维塞克在布达佩斯音乐学 院举行的一场音乐会上意外地发 现了同步化的现象。
演出相当成功,落幕后观众们热烈的掌声长达 3分钟之久,而维塞克博士便在这里发现了有趣 的东西。音乐会刚一结束,观众们雷鸣暴雨般的 掌声响起,然而过了一段时间之后,观众们的热 烈的掌声显然同步化了,变成了同一种节奏的拍 手。为了答谢观众们的热情,演奏者重新走上台 来谢幕,这时的掌声又突然之间失去了刚才的节 奏,雨点般疯狂地响起。在最后长达3分钟的鼓 掌声中,狂热的掌声和同步的掌声依次交替出现。
◆强迫简谐振动发生在激励频率,而这两个坐标 的振幅将在这两个固有频率下趋向最大值。共振时 的振型就是与固有频率相应的固有振型。
第十一讲—二自由度系统强迫振动
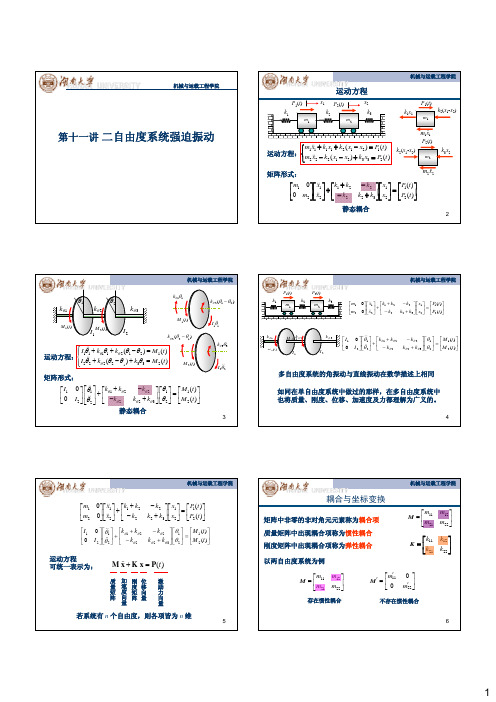
机械与运载工程学院第十一讲二自由度系统强迫振动2机械与运载工程学院运动方程m 1m 2k 3k 1k 2x 1x 2P 1(t )P 2(t )k 1x 1k 2(x 1-x 2)11x m m 1P 2(t )k 2(x 1-x 2)22xm m 2k 3x 2⎩⎨⎧=+−−=−++)()()()(2332122212121111t P x k x x k x m t P x x k x k x m 运动方程:矩阵形式:⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡+−−++⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡)()(0021213222212121t P t P x x k k k k k k x x m m3机械与运载工程学院1θk 1I 2θ2I 2θk 3θk )(1t M )(2t M 1θ11θθk 11θ I )(1t M )(212θθθ−k 22θ I )(2t M 33θθk )(122θθθ−k 1111121212222332()()()()I k k M t I k k M t θθθθθθθθθθθ⎧++−=⎪⎨+−+=⎪⎩运动方程:矩阵形式:122111122322220()0()k k k I M t k k k I M t θθθθθθθθθθ+−⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤+=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥−+⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦ 4机械与运载工程学院⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡+−−++⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡)()(0021213222212121t P t Px x k k k k k k x x m m⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡+−−++⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡)()(0021213222212121t M t M k k k k k k I I θθθθθθθθθθ 多自由度系统的角振动与直线振动在数学描述上相同如同在单自由度系统中做过的那样,在多自由度系统中也将质量、刚度、位移、加速度及力都理解为广义的。
动力学-二自由度系统的自由振动

x1 x2
0
MX KX 0
求如下形式的解:
X
c c '
cost
特征方程
2M K 0
(k2 m22 )(k1 k2 m12 ) k22 0
方程有正实根: 1,2
特征向量:
i2 MKຫໍສະໝຸດ c c '0,
i
1,2
如果
X
c c '
cost
是解,
方程的通解:
则
X
c c '
sin
第七章 机械振动基础
• 当描述系统的一组参数在某一固定值附近往复变 化时,称之为振动。
•力学和机械系统中的振动称为机械振动。
研究振动的目的: 1. 振动的性质与特性 2. 利用振动 3. 消除振动
§7-4、二自由度系统的自由振动
一、运动微分方程的建立
取静平衡位置为坐标原点:
k1
m1
x1
T
1 2
m1x12
m122
c4
振型: 第一振型
第二振型
1
u(1)
k1
k2 m112
k2
1
u(2)
k1
k2
m1
2 2
k2
二、二自由度系统自由振动的特性
系统的固有频率、振型与初始条 件无关,仅与系统的参数有关。
三、一般的二自由度系统
二自由度系统的动力学方程
m11 m21
m12 m22
x1 x2
k11 k21
k12 k22
x1 x2
0
MX KX 0
M:广义质量矩阵,K:广义刚度矩阵
1 2
m2 x22
k2
m2
机械振动二自由度
k2 L y A {0} 2 k2 L q
3. 取广义坐标为yA,yB
m L2 I c 2 1 L2 ET y A ', y B ' 2 1 m L L2 I c L2 m L L2 I c 1 yA ' L2 2 m L I c yB ' 1 L2
这个方程不存在惯性耦合
k2 L2 k1L1 0
时方程存在弹性耦合
对角矩阵, 解耦。系统垂直方向的运动与绕质心的转动独立。
k2 L2 k1L1 0
2.取广义坐标为yA,q
m L y' A m 1 1 1 2 2 ET [m( y' A L1q ' ) I cq ' ] { y' A ,q '} q ' 2 系统 2 2 1 1 m L m L I c
L2 变换矩 [u ] L 1 阵为 L
L1 L 1 L
m L2 I c 2 在yA和yB下 m 0 T L2 的质量矩阵 [u ] 0 I c [u ] m L L2 I c 1 为 L2
m L L2 I c 1 L2 m L2 I c 1 L2
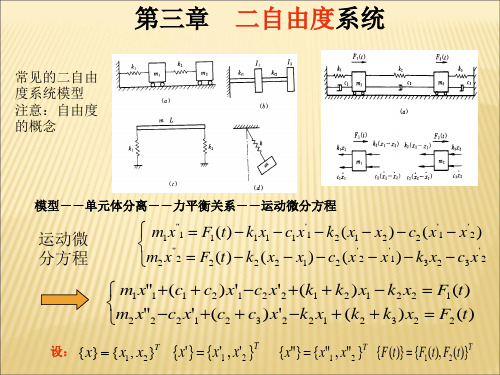
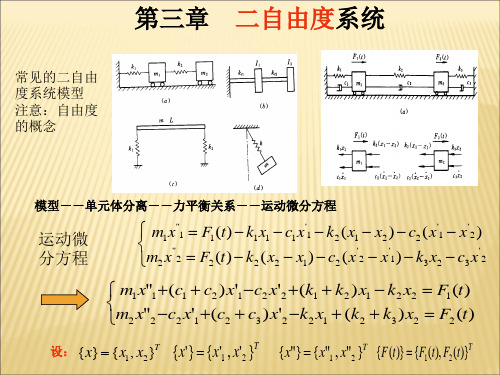
m1 x"1 (c1 c2 ) x'1 c2 x'2 (k1 k2 ) x1 k2 x2 F1 (t ) m2 x"2 c2 x'1 (c2 c3 ) x'2 k2 x1 (k2 k3 ) x2 F2 (t )
设: {x} {x1, x2}T
的动 能和 势能 为:
机械振动学(第二章)-二自由度振动系统
3.1.2 二自由度无阻尼自由振动 1、自由振动微分方程
根据式(3-1),可得无阻尼二自由度自由振动微分方程为:
1 (k1 k2 ) x1 k2 x2 0 x m1 2 k2 x1 (k2 k3 ) x2 0 x m2
即:
(3-4)
(k1 k 2 ) k2 1 x x1 x2 0 m1 m1 ( k 2 k3 ) k2 2 x x1 x2 0 m2 m2
1 1 x x 为加速度向量; 为速度向量; 2 2 x x f1 (t ) f (t ) 为激振力向量 2
x1 x 为位移向量; 2
根据以上,式(2-2)可写为以下更为一般的简化形式,即:
CX KX F (t ) MX
将固有频率 n1和 n 2 代入(3-10),可得
1 a d ad 2 ( ) bc 0 1 b 2 2 1 a d ( a d ) 2 bc 0 2 b 2 2
装备制造学院 College of Equipment Manufacture
装备制造学院 College of Equipment Manufacture
三、二Байду номын сангаас由度系统的振动
装备制造学院
College of Equipment Manufacture
3.1 二自由度自由振动
二自由度系统属于简单的多自由度系统,而多自由度系统 不同于单自由度系统的振动问题,不再是单自由度系统的简 谐振动了,而是多种频率的简谐波组成的复合运动。 这些频率是系统的固有频率,一般系统有几个自由度,就 有几个系统固有频率。 当系统按照其中某一固有频率作自由振动时,称为主振动, 主振动是一种谐振动。 几个自由度系统在任意初始条件下的响应,应是几个主振 动的叠加。 系统做主振动时,任何瞬时各个运动坐标之间具有一定的 相对比值,即称为系统的主振型。
机械振动4两自由度系统的动力学方程

实际振动为:
x(t ) x ( 2) (t ) x ( 2) (t )
1 1 C1 sin(1t 1 ) C2 sin(2t 2 ) (4.1 17) r1 r2
其中C1、C2和1、2由初始条件确定。
《振动力学》 12
例4.1-1: m1 m, m2 2m,
2 2 k11k22 (k1 k2 )(k2 k3 ) k2 k12
i2 0 (i 1,2) i (i 1,2)为正实根,即两个固有 频率。 每个i 代入方程 (4.1 10),得到: 2 k u k12 2 11 i m1 2 (k11 i m1 )u1 k12u2 0 u1 k12 k22 i2 m2
(4.1 15a) (4.1 15b)
u(1)、u( 2)称 为 振 型 向 量 或 模 态 向
量 , 分 别 对 应 于 1、2。
x1(i ) Ci u1(i ) sin( i t i ), 对每个 i: (i ) (i 1,2) (i ) x2 Ci u2 sin( i t i ),
以O点为参考点,O点与质心C的距离为a,距离A、B点分 别为l1、l2,相对静平衡位置O0的位移为x,刚性杆相对平 衡位置的偏角为θ 。 试建立系统的动力学方程。
《振动力学》 19
解:以x、θ 为广义坐标
xc x a sin
θ 为小量
θ
xc x a
k1
x O0
k2
系统的动能:
T 1 2 1 2 C I c C mx 2 2 1 ) 2 1 J 2 a m( x 2 2
m人
k1 c1
m车
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
m mL1
mL1 mL12
I
C
y"
q "
k1 k2
k2L
k2L k2 L2
yA
q
{0}
这个方程存在弹性耦合和惯性耦合
3. 取广义坐标为yA,yB
系统 的动
ET
1 2
y
A
',
yB '
mL22 I L2
mL1L2
c
I
c
mL1L2 L2
mL12 I
I
c
c
yA' yB '
k2
k2 k2 k3
x1 x2
1 {x}T 2
[ K ]{x}
系统的能量 耗散函数
D
1 2
c1x'12
1 2
c2
(x'2
x'1
)2
1 2
c3 x'22
1 2
{x'1
,
x'2
}c1c2c2
c2 c2 c3
xx''12
1 2
{x'}T
[C]{x'}
利用这三个函数可以分别求出三 个矩阵的各个元素
工程振动问题中遇到的质量矩阵一般都是正定矩阵。对于静定和超静定结构,刚度矩
阵也是正定矩阵。
上面关于质量矩阵、阻尼矩阵和刚度矩阵情况的讨论完全可以推广到任意的二自
由度系统和n自由度系统。
[M
]
m1
0
0
m2
[C
]
c1 c2
c2
c2
c2
c3
[K
]
k1 k2
k2
k2
k2
k3
将m1,m2联结在一起的弹性元件k2和阻尼元件c2使得系统的两个质量的振动相互影 响,并使刚度矩阵和阻尼矩阵不是对角矩阵。一般来说,多自由度系统的运动微分 方程中的质量矩阵、阻尼矩阵和刚度矩阵都可能不是对角矩阵,这样微分方程存在 耦合。如果质量矩阵是非对角矩阵,称方程存在惯性耦合;如果阻尼矩阵是非对角 矩阵,称方程存在阻尼耦合;如果刚度矩阵是非对角矩阵,称方程存在弹性耦合。
示例:
不同坐标系下的运动微分方程
四个广义坐标yA,yB,yC,q,
1.取广义坐标为yc,q
系统的动能 和势能为:
ET
1 2
my'c2
1 2
Icq
'2
1 2
{y'c
,q
m
'}
0
0 Ic
y'c
q'
U
1 2
{
yc
,q
}k2
k1 L2
k2 k1
L1
k2 L2 k1L12
k1L1 k2 L22
能和
L2
L2
势能
为:
U
1 2
k1
y
2 A
1 2
k2 yB2
1 2{yA,
yB}k01
0 k2
yA yB
yA和yB 下的运动微分方程为
mL22 I L2
mL1L2
c
I
c
mL1L2 Ic L2
mL12 Ic
y
" A
yB"
k1
0
L2
L2
2.取广义坐标为yA,q
系统 的动
ET
1 2
[m(
y'A
L1q
'
)2
Icq
'2
]
1 2
{y'
A
,q
m '}mL1
能和
势能
为:
U
1 2
[k1
y
2 A
k2( yA
Lq )2 ]
1 2
{
y
A
,q
}k1k2 Lk2
mL1 mL12
Ic
y'
q
A
'
k2L k2 L2
yA
q
yA和q下的运动微分方程为
mij m ji cij c ji kij k ji
系统的动 能为
ET
1 2
m1x'12
1 2
m2
x'22
1 2
{x'1
,
x'2
}m01
0 m2
xx''12
1 {x'}T 2
[M
]{x'}
系统的势 能为
U
1 2
k1x12
1 2
k2
(
x2
x1)2
1 2
k3
x22
1 2
{x1,
x2}T
k1 k2ycqຫໍສະໝຸດ yc和q下的运动 微分方程为
m
0
0 Ic
y
q
k2
k1 L2
k2 k1L1
k2 L2 k1L12
k1L1 k2L22
yc
q
{0}
这个方程不存在惯性耦合
k2L2 k1L1 0 时方程存在弹性耦合 k2L2 k1L1 0 对角矩阵, 解耦。系统垂直方向的运动与绕质心的转动独立。
x'2 ) c3 x ' 2
mm21xx""21
(c1 c2 )x'1c2 x'2 c2 x'1(c2 c3 )x'2
(k1 k2 )x1 k2 x2 k2 x1 (k2 k3 )x2
F1 (t ) F2 (t)
设: {x} {x1, x2}T {x'} {x'1 , x'2 }T {x"} {x"1 , x"2 }T {F(t)} {F1(t), F2(t)}T
[M
]
m1
0
0
m2
[C]
c1 c2
c2
c2
c2
c3
[K
]
k1 k2
k2
k2
k2
k3
[M ]{x"}[C]{x'}[K]{x} {F(t)}
矩阵写出的运动微分方程与单自由度系统的运动微分方程非常相似。如果将 数认为是一阶方阵和一维向量,二者在形式上就统一了
多自由度系统的质量矩阵、阻尼矩阵和刚度矩阵一般均是对称矩阵
定理
实二次型
f
xT
Ax
为正定的充分
必要条件是:它的标准形的 n 个系数全为正。
证
设可逆变换
x
Cy使
n
f ( x) f (Cy) kyi2 . i 1 上页 下页 返回
如果质量矩阵、阻尼矩阵和刚度矩阵都是对角矩阵,则系统的运动微分
方程没有任何耦合,变为两个彼此独立的单自由度方程,各个未知量可以单 独求解。因此,如何消除方程的耦合是求解多自由度系统运动微分方程的关 键。从数学上讲,就是怎样使系统的质量矩阵、阻尼矩阵和刚度矩阵在某一 坐标系下同时成为对角矩阵。
第三章 二自由度系统
常见的二自由 度系统模型 注意:自由度 的概念
模型--单元体分离--力平衡关系--运动微分方程
运动微 分方程
mm21xx""21
F1(t) F2 (t)
k1x1 k2 (x2
c1x'1 x1)
k2 c2
(x1 x2 (x'2 x
)
' 1
c2 (x'1 ) k3x2
mij
2ET , xixj
2U kij xix j ,
2D cij xixj
动能、势能和能量耗散函 数均是非负的。也就是说, 对任意的位移,任意的速 度,必然有
ET
1 {x'}T [M ]{x'} 0 2
U 1 {x}T [K ]{x} 0
2
D 1 {x'}T [C]{x'} 0
2
由此可知,质量矩阵、阻尼矩阵和刚度矩阵均是正定或半正定矩阵。一般说来,
定义
设有实二次型
f
xT
Ax,
如果对于任何
x ≠ 0 , 都有 f(x) > 0,(显然 f(0) = 0 ),则称 f 为正定
二次型,并称对称阵 A 是正定的。记作 A > 0 ;如果
对任何 x ≠ 0 , 都有 f(x) < 0 , 则称 f 为负定二次型, 并称对称阵 A 是负定的 ,记作 A < 0 。