维宏系统安川伺服电机接线定义
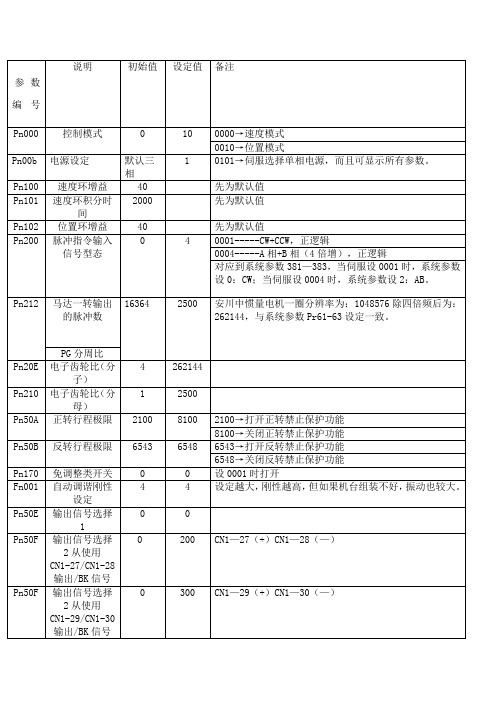
安川私服驱动器参数与接线图
4
0001-----CW+CCW,正逻辑
0004-----A相+B相(4倍增),正逻辑
对应到系统参数381—383,当伺服设0001时,系统参数设0:CW;当伺服设0004时,系统参数设2:AB。
Pn212
马达一转输出的脉冲数
16364
2500
安川中惯量电机一圈分辨率为:1048576除四倍频后为:262144,与系统参数Pr61-63设定一致。
参数编号
说明
初始值
设Байду номын сангаас值
备注
Pn000
控制模式
0
10
0000→速度模式
0010→位置模式
Pn00b
电源设定
默认三相
1
0101→伺服选择单相电源,而且可显示所有参数。
Pn100
速度环增益
40
先为默认值
Pn101
速度环积分时间
2000
先为默认值
Pn102
位置环增益
40
先为默认值
Pn200
脉冲指令输入信号型态
0
0
设0001时打开
Fn001
自动调谐刚性设定
4
4
设定越大,刚性越高,但如果机台组装不好,振动也较大。
Pn50E
输出信号选择1
0
0
Pn50F
输出信号选择2从使用CN1-27/CN1-28输出/BK信号
0
200
CN1—27(+)CN1—28(—)
Pn50F
输出信号选择2从使用CN1-29/CN1-30输出/BK信号
PG分周比
Pn20E
电子齿轮比(分子)
4
伺服电机接线
伺服电机个人日记 2009-09-12 10:17 阅读2 评论0字号:大中小一、按照驱动器说明书上的"位置控制模式控制信号接线图"连接导线3(PULS1),4(PULS2)为脉冲信号端子,PULS1连接直流电源正极(24V电源需串连2K左右的电阻),PULS2连接控制器(如PLC的输出端子)。
5(SIGN1),6(SIGN2)为控制方向信号端子,SIGN1连接直流电源正极(24V电源需串连2K左右的电阻), SIGN2连接控制器(如PLC的输出端子)。
当此端子接收信号变化时,伺服电机的运转方向改变。
实际运转方向由伺服电机驱动器的P41,P42这两个参数控制。
7(com+)与外接24V直流电源的正极相连。
29(SRV-0N),伺服使能信号,此端子与外接24V直流电源的负极相连,则伺服电机进入使能状态,通俗地讲就是伺服电机已经准备好,接收脉冲即可以运转。
上面所述的六根线连接完毕(电源、编码器、电机线当然不能忘),伺服电机即可根据控制器发出的脉冲与方向信号运转。
其他的信号端子,如伺服报警、偏差计数清零、定位完成等可根据您的要求接入控制器。
构成更完善的控制系统。
二、设置伺服电机驱动器的参数。
1、Pr02----控制模式选择,设定Pr02参数为0或是3或是4。
3与4的区别在于当32(C-MODE)端子为短路时,控制模式相应变为速度模式或是转矩模式,而设为0,则只为位置控制模式。
如果您只要求位置控制的话,Pr02设定为0或是3或是4是一样的。
2、Pr10,Pr11,Pr12----增益与积分调整,在运行中根据伺服电机的运行情况相应调整,达到伺服电机运行平稳。
当然其他的参数也需要调整(Pr13,Pr14,Pr15,Pr16,Pr20也是很重要的参数),在您不太熟悉前只调整这三个参数也可以满足基本的要求.3、Pr40----指令脉冲输入选择,默认为光耦输入(设为0)即可。
也就是选择3(PULS1),4(PULS2),5(SIGN1),6(SIGN2)这四个端子输入脉冲与方向信号。
伺服驱动器外部接线及详细说明
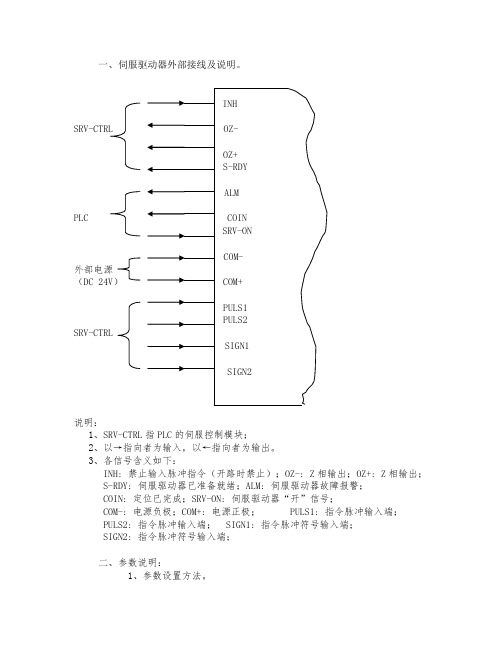
一、伺服驱动器外部接线及说明。
SRV-CTRLPLC外部电源(DC 24V)SRV-CTRL说明:1、SRV-CTRL指PLC的伺服控制模块;2、以→指向者为输入,以←指向者为输出。
3、各信号含义如下:INH: 禁止输入脉冲指令(开路时禁止);OZ-: Z相输出;OZ+: Z相输出;S-RDY: 伺服驱动器已准备就绪;ALM: 伺服驱动器故障报警;COIN: 定位已完成;SRV-ON: 伺服驱动器“开”信号;COM-: 电源负极;COM+: 电源正极; PULS1: 指令脉冲输入端;PULS2: 指令脉冲输入端; SIGN1: 指令脉冲符号输入端;SIGN2: 指令脉冲符号输入端;二、参数说明:1、参数设置方法。
操作面板上共有5个按键,意义如下:MODE:模式转换键,按此键可在4个模式间切换,这4个模式是:DP-××××: 选择监视项目(共有7个, 在按 MODE键显示DP-××××后先按SET,再按↑或↓选择)⑴、DP-EPS: 位置偏差;⑵、DP-SPD: 转速;⑶、DP-TRQ: 转矩;⑷、DP-CNT: 控制方式;⑸、DP-IO: 输入输出信号状态;⑹、DP-ERR: 错误信息;⑺、DP_NO: PR-××××: 设定参数。
EE-××××: 写入参数。
AT-××××: 自动增益调整。
SET:为设定及确认键。
↑:数值增加或移动到下一个选项;↓:数值减少或移动到上一个选项;←:数位间移动;具体设置步骤详见有关Driver的补充信息说明:1、参数号码后加“#“者为需要更改的,如02号参数实际应用中应设为0;2、控制方式含义T:转矩控制S:速度控制P:位置控制3、出厂设定为”*”者为出厂时未设置,需根据实际自行设置;4、其余参数可使用出厂设置;5、最后一栏为新Driver与之对应的参数(有些没有);6、更详细的说明参见Driver手册(旧)或参考Driver手册(新)中对应的参数;7、以下表格为Driver实际参数设置表。
安川SGMJV,SGMGV编码器与CDHD接线定义

测试安川电机样机:
1、电机型号:SGMJV-02A3(带20位编码器)。
2、编码器接线:
电机侧自带的连接器,它直接插入驱动器的反馈输入接口。
它是公头,针脚定义如下图截图所示:
电机侧编码器针脚定义如下图所示:“伺服单元侧”即上述公头,
母头的针脚定义及其延长线接线如下图示:
最终接线表:
功能 CDHD C4(26针) 线色 上述母头(6针) Data+ 1 棕 5 Data- 14 黑 6 5 VDC 11 紫 1 0 VDC
24
蓝
2
3、 电机规格:规格书上未提供电感、电阻、极数等信息。
实测电阻约为7.7 Ohm 。
通
过ZERO 1模式,读取极数为6。
2014-10-11补记:安川电机编码器与SERVOTRONIX CDHD 驱动器的连接
SERVOTRONIX CDHD 驱动器 安川电机编码器
信号名 C4接口(26针) 信号名 6针molex 连接器 Data+ 1 PS 5 Data- 14 /PS 6 5 VDC 11 PG 5V 1 0 VDC 24
PG 0V 2 电池正极 无(编码器直接接到电池)
BAT(+)
3
电池负极 无(编码器直接接到电池) BAT(-)
4
屏蔽
26
FG
壳体
20141029
1、安川SGMGV 马达编码器与CDHD 驱动器接线定义
最终接线表:
功能 CDHD C4(26针) 安川SGMGV 马达编码器(10针) Data+ 1 1 Data- 14 2 5 VDC 11 4 0 VDC
24
9
1
2 4 6
3 5
紫 红 棕
黑
黑 蓝。
安川伺服单元接线规格
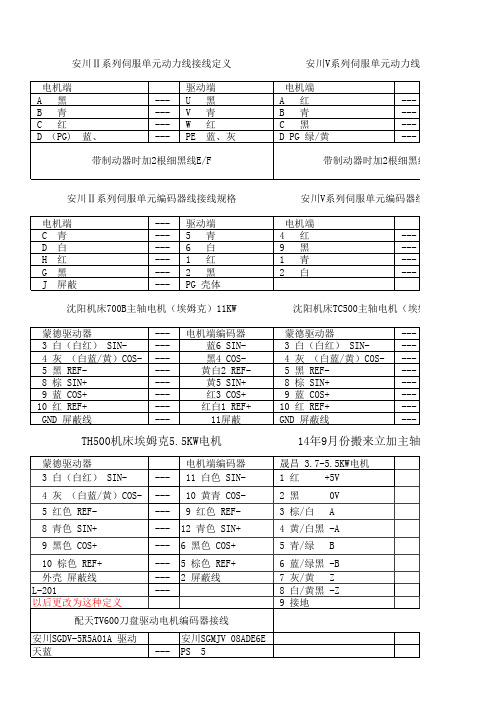
安川SGDV-5R5A01A 驱动
安川SGMJV 08ADE6E
天蓝
--- PS 5
晟昌 3.7-5.5KW电机 1 红 +5V
2黑
0V
3 棕/白 A
4 黄/白黑 -A
5 青/绿 B
6 蓝/绿黑 -B
7 灰/黄 Z 8 白/黄黑 -Z 9 接地
蓝 红 黑 橙 白橙 壳体
--- /PS 5 --- PG5V 1 --- PG0V 2
蒙德驱动2排 红1 黑9 棕2 黄 10 绿3 蓝 11 灰4 白 12
3 白(白红) SIN-
---
4 灰 (白蓝/黄)COS- ---
5 黑 REF-
---
8 棕 SIN+
---
9 蓝 COS+
---
10 红 REF+
---
GND 屏蔽线
---
电机端编码器 蓝6 SIN黑4 COS黄白2 REF黄5 SIN+ 红3 COS+ 红白1 REF+ 11屏蔽
蒙德驱动器
---
安川V系列伺服单元编码器线接线规格
电机端
--- 驱动端
电机端
C青
--- 5 青
4红---ຫໍສະໝຸດ D白--- 6 白
9黑
---
H红
--- 1 红
1青
---
G黑
--- 2 黑
2白
---
J 屏蔽
--- PG 壳体
沈阳机床700B主轴电机(埃姆克)11KW
沈阳机床TC500主轴电机(埃姆克)5.5KW
蒙德驱动器
---
3 白(白红) SIN-
---
4 灰 (白蓝/黄)COS- ---
伺服驱动器接线原理图

颜色
功能
记号
I/O
方式
CN1-5
CN1-6
CN1-17
CN1-18
5V电源
+5V
伺服电机光电编码器用+5V电源;
电缆长度较长时,应使用多根芯线并联,减小线路压降。
CN1-1
CN1-2
CN1-3
CN1-4
CN1-16
电源公共地
0V
CN1-24
编码器A+输入
A+
Type4
与伺服电机光电编码器A+相连接
CN2-16
AOUT-
CN2-22
编码器B相信号
BOUT+
Type5
P,S
CN2-10
BOUT-
P,S
CN2-24
编码器Z相信号
ZOUT+
Type5
P,S
CN2-11
ZOUT-
P,S
CN2-2
编码器Z相集电极开路输出
CZ
Type6
P,S
1.编码器Z相信号由集电极开路输出,编码器Z相信号出现时,输出ON(输出导通),否则输出OFF(输出截止);
CN1-21
编码器U+输入
U+
Type4
与伺服电机光电编码器U+相连接
CN1-9
编码器U-输入
U-
与伺服电机光电编码器U-相连接
CN1-20
编码器V+输入
V+
Type4
与伺服电机光电编码器V+相连接
CN1-8
编码器V-输入
V-
与伺服电机光电编码器V-相连接
CN1-19
编码器W+输入
W+
Type4
与伺服电机光电编码器W+相连接
CN2-4
数控系统伺服驱动器接线及参数设定
数控系统伺服驱动器接线及参数设定数控系统是一种将数字信号转化为机电信号控制机床动作的系统,其中伺服驱动器是数控系统的重要组成部分。
接下来将详细介绍数控系统伺服驱动器接线及参数设定的相关内容。
一、数控系统伺服驱动器接线1.电源接线:伺服驱动器需要接入适配的电源,以提供稳定的电源电压。
通常有三种常用的电源接线方式:单相220V接线、三相380V接线、单相220V与三相380V混合接线。
-单相220V接线:适用于功率较小的伺服驱动器。
通常需要连接L、N和G三根导线,L为火线,N为零线,G为地线。
-三相380V接线:适用于功率较大的伺服驱动器。
通常需要连接主线和辅助线。
主线有三根导线:R、S、T分别为三相电的火线,辅助线为PE 线,用于连接设备的接地线。
-单相220V与三相380V混合接线:适用于一些特殊场合,需根据具体情况进行接线。
2.控制信号接线:伺服驱动器需要接收数控系统发出的控制信号,以控制机床的动作。
通常有以下几个常用的控制信号接线方式:-脉冲信号接线:通常需要连接PUL+、PUL-、DIR+和DIR-四个接口。
PUL+为脉冲信号正极,PUL-为脉冲信号负极,DIR+为方向信号正极,DIR-为方向信号负极。
-使能信号接线:通常需要连接ENA+和ENA-两个接口。
ENA+为使能信号正极,ENA-为使能信号负极,当ENA+处于高电平时,伺服驱动器处于使能状态。
-报警信号接线:通常需要连接ALM+和ALM-两个接口。
当伺服驱动器发生故障或异常情况时,会产生报警信号,通过连接报警信号接口,可以及时响应故障并采取相应的措施。
二、数控系统伺服驱动器参数设定伺服驱动器的参数设定是为了使其能够更好地适应具体的机床加工需求,提高加工精度和效率。
1.速度参数设定:包括加速时间、减速时间、最大速度等参数的设定。
通过合理设定速度参数,可以控制机床的加工速度,以满足不同工件加工的需求。
2.位置参数设定:包括回零速度、回零位置、绝对位置、相对位置等参数的设定。
伺服电机接线
伺服电机接线问题个人日记 2009-09-12 10:17 阅读2 评论0字号:大中小一、按照驱动器说明书上的"位置控制模式控制信号接线图"连接导线3(PULS1),4(PULS2)为脉冲信号端子,PULS1连接直流电源正极(24V电源需串连2K左右的电阻),PULS2连接控制器(如PLC的输出端子)。
5(SIGN1),6(SIGN2)为控制方向信号端子,SIGN1连接直流电源正极(24V电源需串连2K左右的电阻), SIGN2连接控制器(如PLC的输出端子)。
当此端子接收信号变化时,伺服电机的运转方向改变。
实际运转方向由伺服电机驱动器的P41,P42这两个参数控制。
7(com+)与外接24V直流电源的正极相连。
29(SRV-0N),伺服使能信号,此端子与外接24V直流电源的负极相连,则伺服电机进入使能状态,通俗地讲就是伺服电机已经准备好,接收脉冲即可以运转。
上面所述的六根线连接完毕(电源、编码器、电机线当然不能忘),伺服电机即可根据控制器发出的脉冲与方向信号运转。
其他的信号端子,如伺服报警、偏差计数清零、定位完成等可根据您的要求接入控制器。
构成更完善的控制系统。
二、设置伺服电机驱动器的参数。
1、Pr02----控制模式选择,设定Pr02参数为0或是3或是4。
3与4的区别在于当32(C-MODE)端子为短路时,控制模式相应变为速度模式或是转矩模式,而设为0,则只为位置控制模式。
如果您只要求位置控制的话,Pr02设定为0或是3或是4是一样的。
2、Pr10,Pr11,Pr12----增益与积分调整,在运行中根据伺服电机的运行情况相应调整,达到伺服电机运行平稳。
当然其他的参数也需要调整(Pr13,Pr14,Pr15,Pr16,Pr20也是很重要的参数),在您不太熟悉前只调整这三个参数也可以满足基本的要求.3、Pr40----指令脉冲输入选择,默认为光耦输入(设为0)即可。
也就是选择3(PULS1),4(PULS2),5(SIGN1),6(SIGN2)这四个端子输入脉冲与方向信号。
维宏系统安川伺服电机接线定义
1.1 6B -E X 1端子板与伺服驱动器接线图及该驱动器的基本参数
1.1.1 安川SGSM 伺服驱动器与6B-EX1端子板连线图及其参数表 1. 6B-EX1端子板与安川SGSM 型驱动器的接线,如图表12所示:
SRDY-
Z轴接头拖线(黑)
Z轴接头拖线(红)接COM
接24V 30SRDY+29SG
1
VIN 47*PULS 8PULS
7SIGN 11*SIGN 12+5
P+P-D+D-PCIMC-6B端子板
安川SGDM_CN1
图表 1
6B-EX1接安川SGSM 型驱动器
注释:X 、Y 、Z 三个轴接线相同。
只有Z 轴的带两根抱闸拖线,可接在继电器来控制抱闸。
2.安川Σ-Ⅱ系列伺服器参数设定
(1)设定辅助功能参数,如表格 1所示:
如果用安川伺服驱动器,设定以下参数后,机床即可工作。
但是,为优化机床性能,请详细参阅伺服驱动器技术资料。
数控系统伺服驱动器接线及参数设定
7
BRK-OFF
-9-
CA160/180/400/LXXX 数控系统伺服驱动器接线及参数设定
18. 信捷 DS2-AS 系列伺服接线图
山龙数控DB15驱动器接口
A+
1
A-
2
B+
3
B-
4
Z+
5
Z-
7
ALM
8
CLR 10
PU+ 11 PU- 12
DR+ 13 DR- 14
+24V 6 GND 15
SON
4. 台达 ASD-A 型伺服接线图
山龙数控DB15驱动器接口
A+
1
A-
2
B+
3
B-
4
Z+
5
Z-
7
PU+ 11 PU- 12
DR+ 13 DR- 14
ALM
8
CLR 10
+24V 6 GND 15
双绞线
SON
9
Z轴抱闸拖线(红) Z轴抱闸拖线(黑)
台达ASDA-A系列伺服器50P高密插头
21 22
25 23
1
D03 ALM
17 DI1+SON
18 DI2 ARST
4
COM+
13
COM-
16 DO1+ 13 COM-
-3-
CA160/180/400/LXXX 数控系统伺服驱动器接线及参数设定
6. 台达 ASDA-B 型伺服接线图(双驱动器接线)
台达ASDA-B型 DB25(两排针孔)
OA
10
/OA
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.1 6B -E X 1端子板与伺服驱动器接线图及该驱动器的基本参数
1.1.1 安川SGSM 伺服驱动器与6B-EX1端子板连线图及其参数表 1. 6B-EX1端子板与安川SGSM 型驱动器的接线,如图表12所示:
SRDY-
Z轴接头拖线(黑)
Z轴接头拖线(红)接COM
接24V 30SRDY+29SG
1
VIN 47*PULS 8PULS
7SIGN 11*SIGN 12+5
P+P-D+D-PCIMC-6B端子板
安川SGDM_CN1
图表 1
6B-EX1接安川SGSM 型驱动器
注释:X 、Y 、Z 三个轴接线相同。
只有Z 轴的带两根抱闸拖线,可接在继电器来控制抱闸。
2.安川Σ-Ⅱ系列伺服器参数设定
(1)设定辅助功能参数,如表格 1所示:
如果用安川伺服驱动器,设定以下参数后,机床即可工作。
但是,为优化机床性能,请详细参阅伺服驱动器技术资料。