自适应神经网络模糊推理系统最优参数的研究
基于神经网络-模糊推理的目标识别融合研究
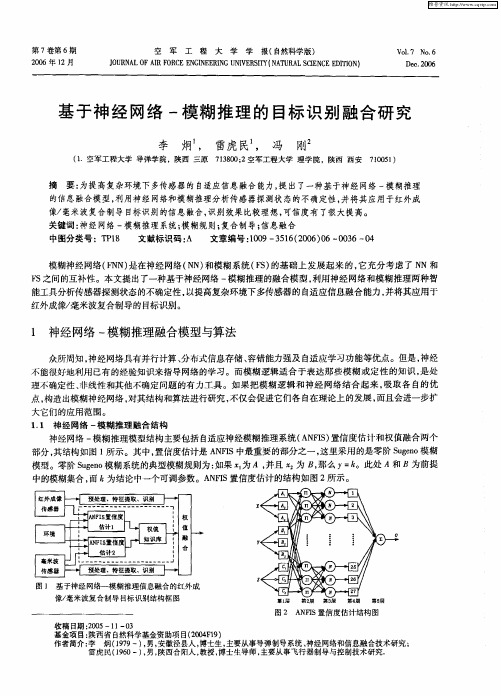
境特性及 目标的辐射特征, 完成 目标的属性和身份识别。图 2中的A FS N I 具有 3 个输入 、 个输出及 2 个 1 7 f
—
T e 模糊规则。其中输入变量定义如下 : 表示传感器状态 ( 在[ , ] hn 0 1 区间内, 越大, 值 传感器状态越
好) y , 表示天气状况, z表示 目 标距离 。每个变量对应 3 个模糊集 , 其成员函数为高斯函数。输出 O表示传
节点 ii 456) ( = ,, 的模糊集 ; 。C 及 C ( C 、 : , 对应近 、 远) 中、 为节点 i i 7 89) ( = , , 的模糊集 ; ¨表示对应输入 Q
维普资讯
第6 期
李
炯等 : 基于神经网络 一 模糊推理 的 目 标识别融合研究
12 神经网络 一 . 模糊推理融合算法 1 模糊规则。应用模糊神经网络实现红外成 毫米波复合制导 目标识别分类 , ) 充分利用了制 导信息 具有模糊性的特点 , 解决制导过程的不确定性和模糊性。模糊神经 网络推理机的任务是通过分析传感器 、 环
的信息融合模 型, 利用神经网络和模糊推理分析传感制导 目 标识别的信 息融合, 识别效果比较理想, 可信度有 了很大提高。 关键词 : 经 网络 一模 糊推 理 系统 ; 糊规 则 ; 神 模 复合 制 导 ; 息 融合 信 中图分类号 :T 1 P8 文献标识码: A 文章编号 : 0 — 5 6 20 )6— 0 6 0 1 9 3 1 (0 6 0 03 — 4 0
基 于 神 经 网络 一模糊 推 理 的 目标 识 别 融 合 研 究
李 炯 , 雷虎 民 , 冯 刚
(.空军工程 大学 导弹学院 ,陕西 三原 7 3 0 ; 1 180 2空军工程 大学 理学院 ,陕西 西安 7 0 5 ) 10 1
基于神经网络的知识推理研究综述
基于神经网络的知识推理研究综述一、本文概述随着技术的快速发展,知识推理作为其中的一项核心任务,逐渐受到了广泛关注。
神经网络作为实现知识推理的有效工具,其研究与应用日益深入。
本文旨在全面综述基于神经网络的知识推理研究现状,分析现有方法的优缺点,并展望未来的发展趋势。
我们将简要介绍知识推理的基本概念及其重要性,阐述神经网络在知识推理中的应用背景。
随后,我们将从神经网络的基本原理出发,详细分析不同神经网络结构在知识推理任务中的表现,包括卷积神经网络、循环神经网络、图神经网络等。
接着,我们将探讨神经网络在知识推理中的关键技术,如知识表示、知识嵌入、推理规则学习等,并分析这些技术在不同应用场景中的优化策略。
本文还将对基于神经网络的知识推理方法进行分类总结,包括基于规则的方法、基于嵌入的方法、基于端到端学习的方法等,并对各类方法的性能进行对比分析。
我们将关注神经网络在知识推理中面临的挑战与问题,如知识稀疏性、推理效率、可解释性等,并探讨相应的解决方案。
本文将对基于神经网络的知识推理的未来研究方向进行展望,以期为未来研究提供有益的参考。
通过本文的综述,我们期望能够为读者提供一个清晰、全面的视角,深入了解基于神经网络的知识推理研究的前沿动态与发展趋势。
二、神经网络基础知识神经网络,作为一种模拟人脑神经元结构和工作机制的计算模型,已经在多个领域取得了显著的成果。
其基础知识和核心技术为知识推理提供了强大的工具。
神经网络主要由输入层、隐藏层和输出层组成,每一层都由多个神经元构成。
每个神经元接收来自上一层神经元的输入信号,经过加权求和并通过激活函数处理后,产生输出信号传递给下一层神经元。
神经网络的训练过程通常采用反向传播算法,通过不断调整神经元的权重和偏置,使得网络在接收输入信号后能够产生期望的输出信号。
训练过程中,损失函数用于衡量网络的实际输出与期望输出之间的差异,通过最小化损失函数来优化网络参数。
常见的神经网络类型包括前馈神经网络、卷积神经网络(CNN)、循环神经网络(RNN)等。
模糊控制理论及应用

模糊控制理论及应用模糊控制是一种基于模糊逻辑的控制方法,它能够应对现实世界的不确定性和模糊性。
本文将介绍模糊控制的基本原理、应用领域以及未来的发展趋势。
一、模糊控制的基本原理模糊控制的基本原理是基于模糊逻辑的推理和模糊集合的运算。
在传统的控制理论中,输入和输出之间的关系是通过精确的数学模型描述的,而在模糊控制中,输入和输出之间的关系是通过模糊规则来描述的。
模糊规则由模糊的IF-THEN语句组成,模糊推理通过模糊规则进行,从而得到输出的模糊集合。
最后,通过去模糊化操作将模糊集合转化为具体的输出值。
二、模糊控制的应用领域模糊控制具有广泛的应用领域,包括自动化控制、机器人控制、交通控制、电力系统、工业过程控制等。
1. 自动化控制:模糊控制在自动化控制领域中起到了重要作用。
它可以处理一些非线性和模糊性较强的系统,使系统更加稳定和鲁棒。
2. 机器人控制:在机器人控制领域,模糊控制可以处理环境的不确定性和模糊性。
通过模糊控制,机器人可以对复杂的环境做出智能响应。
3. 交通控制:模糊控制在交通控制领域中有重要的应用。
通过模糊控制,交通信号可以根据实际情况进行动态调整,提高交通的效率和安全性。
4. 电力系统:在电力系统中,模糊控制可以应对电力系统的不确定性和复杂性。
通过模糊控制,电力系统可以实现优化运行,提高供电的可靠性。
5. 工业过程控制:在工业生产中,许多过程具有非线性和不确定性特点。
模糊控制可以应对这些问题,提高生产过程的稳定性和质量。
三、模糊控制的发展趋势随着人工智能技术的发展,模糊控制也在不断演进和创新。
未来的发展趋势主要体现在以下几个方面:1. 混合控制:将模糊控制与其他控制方法相结合,形成混合控制方法。
通过混合控制,可以充分发挥各种控制方法的优势,提高系统的性能。
2. 智能化:利用人工智能技术,使模糊控制系统更加智能化。
例如,引入神经网络等技术,提高模糊控制系统的学习和适应能力。
3. 自适应控制:模糊控制可以根据系统的变化自适应地调整模糊规则和参数。
智能控制技术复习题课后答案讲解
(2)。
10、(1)模型未知或知之甚少;(2)模型的结构和参数可能在很大范围内变化。
立一个实用的专家系统的步骤包括三个方面的设计,它们分别是、
和。知识库的设计推理机的设计人机接口的设计
13.专家系统的核心组成部分为和。知识库、推理机
一、填空题
1.智能控制是一门新兴的学科,它具有非常广泛的应用领域,例如、、和。
1、交叉学科在机器人控制中的应用在过程控制中的应用飞行器控制
2.传统控制包括和。2、经典反馈控制现代理论控制
3.一个理想的智能控制系统应具备的基本功能是、、和。
3、学习功能适应功能自组织功能优化能力
4.智能控制中的三元论指的是:、和。
•(6)具有获取知识的能力;
•(7)知识与推理机构相互独立。专家系统一般把推理机构与知识分开,使其独立,使系统具有良好的可扩充性和维护性。
2、简述专家系统设计的基本结构。
答:基本知识描述---系统体系结构---工具选择----知识表示方法----推理方式----对话模型.P20
4、什么是专家控制系统?专家控制系统分为哪几类?
46、二进制编码
47.遗传算法的3种基本遗传算子、和。
47、比例选择算子单点交叉算子变异算子
48.遗传算法中,适配度大的个体有被复制到下一代。更多机会
49.遗传算法中常用的3种遗传算子(基本操作)为、、和。
49、复制、交叉和变异
第一章
1
答:(1)在无人干预的情况下能自主地驱动智能机器实现控制目标的自动控制技术。
(3)神经控制系统(1分)
神经网络具有某些智能和仿人控制功能。学习算法是神经网络的主要特征。
(4)遗传算法(2分)
控制系统中的模糊控制与神经网络控制比较

控制系统中的模糊控制与神经网络控制比较在现代控制系统中,模糊控制和神经网络控制是两种常见的控制方法。
它们都具有一定的优势和特点,但是又各自存在一些局限性。
本文将就这两种控制方法进行比较,旨在帮助读者更好地理解和选择适合自己需求的控制方法。
一、模糊控制模糊控制是一种基于模糊逻辑的控制方法,它将人的直观经验与控制系统的数学模型相结合,用来应对系统模型不确定或难以建模的情况。
模糊控制系统由模糊化、模糊推理和解模糊化三个主要部分组成。
1、模糊控制的优势(1)适应不确定性:模糊控制可以很好地应对系统参数变化、环境变化等不确定性因素,因为它不需要准确的数学模型。
(2)处理非线性系统:对于非线性系统,模糊控制可以通过模糊化和模糊推理来逼近系统的动态特性,因此具备较好的适应性。
(3)易于理解和调试:模糊规则基于经验知识,形式简单易懂,参数调节相对容易,操作员或工程师可以理解和调试模糊控制系统。
2、模糊控制的局限性(1)计算复杂性:模糊控制系统需要进行模糊化、模糊推理和解模糊化等操作,这些操作可能导致计算量大、实时性差,不适合对响应时间要求较高的控制系统。
(2)难以优化:模糊控制的参数调节通常是基于试错法,缺乏理论指导,难以进行精确优化,因此对于某些需要高精度控制的系统效果并不理想。
二、神经网络控制神经网络控制是一种利用人工神经网络模拟生物神经网络的结构和功能来实现控制的方法。
神经网络控制系统由输入层、隐含层和输出层构成,通过训练神经网络来实现控制效果。
1、神经网络控制的优势(1)适应性强:神经网络具有强大的自适应性能,能够适应未知系统或具有时变性质的系统,从而在控制过程中实现自学习和自适应。
(2)映射能力强:神经网络可以将非线性映射问题转化为线性可分问题进行处理,从而更好地逼近系统的非线性特性。
(3)具备优化能力:可以通过合理的网络结构和训练算法,实现对网络参数的优化,从而提高控制系统的性能。
2、神经网络控制的局限性(1)训练需耗时:神经网络控制需要通过大量的数据训练神经网络,这可能需要耗费较长的时间,并且对数据质量和标定要求较高。
ANFIS简介

ANFIS简介自适应网络模糊推理系统,也称为基于网络的自适应模糊推理系统(Adaptive Network-based Fuzzy Inference System),简称ANFIS。
ANFIS由加利福尼亚大学伯克利分校的Jang Roger于1993年提出,是一种综合了神经网络自适应性的模糊推理系统。
它综合神经网络的学习算法和模糊推理的简洁形式,通过对训练数据组的学习,以产生数值解。
因此,该模型既具有学习机制,又具有模糊系统的语言推理能力等优点。
自开发出来至今,ANFIS不同学科领域都取得了广泛的应用。
模糊推理系统的学习归结为对条件参数(非线性参数)与结论参数(线性参数)的调整。
对于所有参数,均可采用基于梯度下降的反向传播算法来调整参数,而采用一种混合算法可以提高学习的速度。
混合算法中条件参数仍采用反向传播算法调整,而结论参数采用线性最小二乘估计算法调整。
ANFIS 结构有五层,其结构如图6所示,为简单起见,假定所考虑的模糊推理系统有两个输入x 和y ,输出为f ,均为可提供的数据对,网络同一层的每个节点具有相似的功能,用1,i O 表示第一层第i 个节点的输出,依此类推。
图 6 典型ANFIS 的结构第一层:输入参数的选择和模糊化,它是模糊规则建立的第一步。
该层每个节点i 是以节点函数表示的方形节点1,(),1,2i Ai O x i μ== 1,(2)(),3,4i B i O y i μ-==i A 和2i B -是与该节点函数相关的语言变量,如“大”、“小”或“高”“低”等,或者说 1,i O 是模糊集A (A =1A ,2A ,1B ,2B )的隶属度函数,通常可以选用钟型函数。
21()1[()]i Ai b i i x x c a μ=-+其中,{,,}i i i a b c 为隶属函数的参数集合。
另外,三角隶属函数(trimf )、梯形隶属函数(trapmf )等都是模糊化时常用的函数[45]。
基于自适应神经网络的股票预测模型研究

基于自适应神经网络的股票预测模型研究近年来,机器学习和人工智能等技术的飞速发展,让股票预测领域的研究者们有了更多的选择。
其中,基于自适应神经网络的股票预测模型受到了越来越多的关注,因为它在预测准确率和适应性方面具有不俗的表现,本文就基于该技术进行深入研究。
一、自适应神经网络简介自适应神经网络,即Adaptive Neuro-Fuzzy Inference System(ANFIS),是将模糊逻辑理论和神经网络技术相结合的一种智能系统。
它基于模糊理论的不确定性和神经网络的非线性映射能力,可以应对各种复杂的非线性问题。
在股票预测中,自适应神经网络可以用来提取影响股票走势的指标,包括单一技术指标和组合指标。
这些指标中,有一部分是基于技术的(如收盘价、成交量、MACD等),还有一部分是基于基本面的(如市盈率、市净率等)。
自适应神经网络在进行指标提取时,通过模糊推理来确定各指标对股票价格的影响程度和方向,然后采用神经网络来进行预测。
二、基于自适应神经网络的股票预测模型设计在具体的模型设计中,首先需要确定预测时期的长度和所使用的指标。
在本文中,我们采用了20天的时期长度和12个指标,其中包括了基于技术和基本面的指标,如收盘价、成交量、MACD、市盈率、市净率等。
然后,我们需要对指标进行模糊化处理,以便于将其转化为具有模糊逻辑的变量。
这里我们采用了三角函数型的隶属度函数来进行处理,以便于减少噪声对结果的干扰。
接下来,我们需要对数据进行规范化处理,以便于神经网络的学习和预测。
这里我们采用了最小-最大规范化的方法,将每个指标的数据范围规定在[0,1]之间。
最后,我们采用了反向传播(BackPropagation)算法来对神经网络进行训练。
其中,我们采用了交叉验证(Cross-Validation)来调整模型的参数,以便于减少过拟合的风险,并提高模型的泛化性能。
三、模型实验和结果为了评估所设计的股票预测模型的准确性和性能,我们使用了标准的交叉验证方法来进行实验,并采用均方根误差(RMSE)和平均绝对误差(MAE)等指标来度量模型的预测性能。
神经网络和模糊系统

05
CATALOGUE
应用案例
控制系统
神经网络在控制系统中主要用于优化 和预测控制策略。
通过训练神经网络来学习系统的动态 行为,可以实现对系统的精确控制。 例如,在机器人控制、航空航天控制 等领域,神经网络被用于提高系统的 稳定性和响应速度。
数据分类
模糊系统在数据分类中主要用于处理不确定性和不精确性。
练出最优的神经网络模型。
反向传播算法
根据输出层的误差,计算出每 层的误差梯度,然后根据梯度 下降法更新权重和偏差。
随机梯度下降法
在训练过程中,每次只使用一 部分数据来计算梯度,然后更 新权重和偏差,以提高训练效 率。
自适应学习率算法
根据误差梯度的变化情况,动 态调整学习率,以加快收敛速
度并避免陷入局部最小值。
自适应神经模糊系统
自适应神经模糊系统是在神经模糊系统的基础上,增加了 自适应调整能力。它能够根据系统的运行状态和输入数据 的特性,自适应地调整模糊规则和隶属函数的参数,以更 好地适应环境和任务的变化。
自适应神经模糊系统通过引入在线学习算法和自适应调整 策略,使得系统能够根据运行过程中的反馈信息,不断优 化模糊规则和参数,提高系统的实时性和准确性。
ቤተ መጻሕፍቲ ባይዱ
混合神经模糊系统
混合神经模糊系统是一种将不同类型的神经网络和模糊逻辑结合起来,形成一个 多层次、多模态的混合智能系统。它利用不同类型神经网络的优势,结合多种模 糊逻辑方法,实现对复杂系统的全面建模和控制。
混合神经模糊系统通过集成不同类型的神经网络和模糊逻辑方法,能够充分发挥 各自的优势,提高系统的整体性能。同时,它还能够处理不同类型的输入数据和 任务,具有更强的泛化能力和适应性。
应用前景
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第22卷 第8期计 算 机 仿 真2005年8月 文章编号:1006-9348(2005)08-0140-04自适应神经网络模糊推理系统最优参数的研究翁玉麟,邓长虹(武汉大学电气工程学院,湖北武汉,430072)摘要:模糊规则的提取和隶属度函数的学习是模糊系统设计中重要而困难的问题。
自适应神经网络模糊推理系统(ANF IS)能基于数据建模,无须专家经验,自动产生模糊规则和调整隶属度函数。
在建立一个初始系统进行训练时,其隶属度函数的类型、隶属度函数的数目以及训练次数都是待定的,这三个参数的选择直接影响系统训练后的效果,它们的确定方法有待研究。
该文应用自适应神经网络模糊推理系统的方法对一个典型系统进行建模仿真,并阐述这三个参数的寻优方法。
关键词:自适应神经网络;模糊系统;隶属度函数中图分类号:TP3 文献标识码:AResearch on Best Param eters i n Adaptive Neura l-FuzzyI nference SystemW EN G Yu-lin,D EN G Chang-hong(Electrical Engineering School,W uhan University,W uhan Hubei430072,China)ABSTRACT:Extraction of fuzzy rules and learning of parameters of membership functions are vital but difficultwhen designing a fuzzy system.App lying Adap tive Neural-Fuzzy Inference System(ANF IS)can p roduce fuzzyrules and adjust membership functions automatically based on data w ithout experience of experts.W hen settingup an initialized system to train,the type of membership functions,the number of membership functions and theti m e of training are all variables,and the choice of these parameters w ill directly affect the result of modeling,but the method for ensuring these parameters still needs research.This paper gives the si mulation examp le formodeling a typ ical system w ith Adap tive Neural-Fuzzy Inference System and expatiates the method for choosingthese three parameters.KEYWO RD S:Adap tive neural net work;Fuzzy system;M embership functions1 引言自从M amdani和A ssilian利用模糊控制理论为一简单动力过程构造模糊控制器以来,模糊控制在实际问题中的应用日益广泛。
但是,模糊理论在实际应用中也存在一些问题,如隶属度函数的确立目前还没有一套成熟有效的方法,在很难或无法获得专家经验的情况下,隶属度函数的确定是十分困难的[1]。
自适应神经网络模糊推理系统(ANF IS)能基于数据建模,自动产生模糊规则和隶属度函数,而不是基于经验或直觉给定。
这对于那些特性还不被人们所完全了解或者特性非常复杂的系统是十分有效的。
许多学者在应用自适应神经网络模糊推理系统建模方面已经进行了探索并获得很多有益的成果,但在建立一个初始系统进行训练时,其隶属度函数的类型、隶属度函数的数目以及训练次数都是待定的,这三个参数的选择直接影响系统训练后的效果,可是选择怎样的参数可以使建立的模型最佳,至今没有学者进行深入的研究。
本文应用ANF IS的方法对一个典型系统进行建模仿真,并阐述这三个参数的选择方法。
2 自适应神经网络模糊系统学者Roger Jang提出了与一阶Sugeno模型模糊推理系统功能相同的自适应神经模糊推理系统(Adap tive Net work-based Fuzzy Inference System,ANF IS)[2][3],它是模糊逻辑和神经网络的结合产物。
ANF IS结构的构造见图1,其同一层的每个节点具有相似的功能(这里用O1,i表示第一层的第i个节点的输出)。
第一层:该层每个节点i是以节点函数表示的方形节点(该层参数是可变的):收稿日期:2004-03-17图1 ANF IS 结构的构造O 1,i =μA i (x 1),i =1,2, O 1,i =μB (i-2)(x 2),i =3,4其中,x 1(或x 2)为节点i 的输入,A i (或B i-2)是该节点的函数值相关的语言变量,如“大”或“小”等。
或者说O 1,i 是模糊集A (A =A 1,A 2,B 1,B 2)的隶属度函数。
第二层:该层的节点在图中用7表示,将输入信号相乘,而将乘积输出为O 2,i =w i =μA i (x 1)μB i (x 2), i =1,2第三层:该层的节点在图中用N 表示,第i 个节点计算第i 条规则的w i 与全部规则w 值之和的比值为:O 3,i =w i f i =w i w 1+w 2, i =1,2第四层:该层的每个节点i 为自适应节点,其输出为:O 4,i =w i f i =w i (p i x i +q i x 2+r i ), i =1,2第五层:该层的单节点是一个固定节点,所以输入信号的总输出为:O 5,i =∑iw i fi=∑iw i f i∑iwi 3 基于M ATLAB 的仿真研究在进行系统设计时,需建立一个初始的sugeno 系统后开始训练,其中的隶属度函数的类型、隶属度函数的数目以及训练次数都是待定的,这三个参数的选择对于最终模糊推理系统的建立至关重要[4]。
下面以一个非线性函数为例:y =sin2x ・e 0.2x,x ∈[0,10],分别分析这三个参数对系统的影响,并且讨论它们各自的寻优方法。
3.1 比较训练次数的确定在[0,10]区间内等间隔选取20个点作为训练数据,任意选定三个参数,采用高斯型隶属度函数,隶属度函数的数目为5条,训练次数为1000次。
训练过程中,训练次数和均方根(∑∞k =1(xk- x )2)误差的变化曲线如图2。
图2中,训练200次时,均方根误差为0.0258;训练1000次时,均方根误差为0.0247。
两者仅相差0.0011,但后者对于计算机的工作量显然要大很多。
有的系统训练200已经足够,但有的复杂系统训练1000次还不行,因此,训练次数并不是越多越好的,而是要将精确程度和计算量一起考虑。
图2 训练次数和均方根误差的变化曲线在此引入一个性能指标δ。
设定初始的训练次数为n 0次,步长为Δn,trnerr (n )为训练n 次后的均方根误差。
δ=|trnerr (n +Δn )-trnerr (n )|当δ≤ε,n 为最优训练次数其中,Δn 和ε可根据用户的精度要求选择。
流程图如图3。
图3 确定最优训练次数流程图以本系统为例,Δn =100,ε=1‰,仿真后可得最优训练次数为133次。
利用得到的最优训练次数进行训练,训练前后隶属度函数的变化如图4和图5。
图4 训练前隶属度函数图5 训练后隶属度函数模糊系统的输出及原非线性函数的曲线如图6。
图6 模糊系统的输出及原非线性函数的曲线由图6可见,基于自适应神经网络模糊推理系统模型很好地模拟了原曲线。
3.2 隶属度函数数目的选择在[0,10]区间内等间隔选取20个点作为训练数据,采用高斯型隶属度函数,训练次数为200次,隶属度函数的数目分别取3条、5条和20条。
仿真后,模糊系统的输出及原非线性函数的曲线如图7、图8和图9。
图7 隶属度函数的数目分别取3条图8 隶属度函数的数目分别取5条图9 隶属度函数的数目分别取20条图10 确定隶属函数最优数目流程图从图中可以看出,在这三种情况下,隶属度函数定为5条时建立的模型效果最优。
如果隶属度函数的数目选择太少,系统的结构不足以反映待建模型的复杂特性;如果隶属度函数的数目选择太多,模糊系统又因为过于复杂也无法反映待建模型的特性。
在此引入一个性能指标θ,设原曲线在x =a 处的值为y,模糊系统(隶属度函数的数目为i 条)在x =a 处的值为y i ,采样若干点(注:这些点要和原来的训练数据不同)。
θi =∑|y i -y |大致选定i 的范围[n 1,n 2],当θi 的值最小,则选择隶属度函数的数目为i 条是最佳。
流程图如图10。
以本系统为例,在x ∈[0,9]区间内等间隔选取30个点,i ∈[2,30],仿真结果如图11。
图11 隶属度函数的数目与值的变化如图示,隶属度函数的最优数目为7条,θ最小为0.1248。
3.3 隶属度函数类型的选择在[0,10]区间内等间隔选取20个点作为训练数据,训练次数为200次,隶属度函数的数目分别取5条。
隶属度函数的类型选取常用的高斯型、三角型和钟形进行比较。
仿真后,高斯型和钟形隶属度函数都能很好地模拟原曲线,但两者的θ值不同,高斯型为0.6682,钟形为0.7243(在x ∈[0,9]区间内等间隔选取30个点)。
可是选取三角型隶属度函数不能很好的模拟原曲线,如图12。
图12 模糊系统的输出及原非线性函数的曲线 因此,在训练次数、隶属度函数的数目确定的情况下,选取不同的隶属度函数的类型时,系统的结构应当反映出全部的特性,同时保持尽量小。
隶属度函数的类型的确定方法和流程图可参考隶属度函数数目的选择。
4 结论本文详细介绍了自适应神经模糊推理系统AN F IS 的理论和结构,并用MA TLAB 进行建模和仿真。
对于隶属度函数的类型、隶属度函数的数目以及训练次数的选取进行了分析,比较了这三个参数对于系统的影响,提出了新增性能指标δ来确定训练次数、新增性能指标θ来确定隶属度函数类型和数目的方法,取得了良好的效果。
为实际应用中自适应神经模糊推理系统的设计,提供了初始训练参数选择的理论依据。
参考文献:[1] 李士勇.模糊控制、神经控制和智能控制论[M ].哈尔滨工业大学出版社,1996.[2] T Takagi,M Sugeno .Fuzzy identification of system s and itsapp lications to modeling and control[J ].IEEE Transon S mc,1985.[3] J S R Jang .ANF IS:Adap tive -Net work -Based FuzzyInference System [J ].IEEE Transaction on System s,M an and Cybernetics,May/June 1993,23(3).[4] 吴晓莉,林哲辉.MA T LAB 辅助模糊系统设计[M ].西安电子科技大学出版社,2002.[作者简介]翁玉麟(1982.12-),男(汉族),上海人,武汉大学电气工程学院本科生,主要从事人工智能控制的研究。