电动机纵联差动保护
纵联差动保护原理
纵联差动保护原理
纵联差动保护是电力系统中常用的保护方式之一,用于检测和保护多个平行的发电机或变压器组的差动故障。
其原理是根据比较线圈中电流的差值来判断系统是否存在差动故障,并发出保护信号。
在纵联差动保护中,一组比较线圈置于发电机或变压器的两端,同时连接到保护装置中。
当正常运行时,比较线圈中的电流应该是相等的,差动电流为零。
而当系统发生差动故障时,比较线圈中的电流会出现差异,差动电流会产生并流入保护装置。
保护装置对比较线圈中的电流进行比较,并设定一个差动电流阈值。
当差动电流超过阈值时,保护装置会判断为故障发生,并发出保护信号,触发断路器进行故障切除,保护系统的正常运行。
为了提高纵联差动保护的检测能力和可靠性,通常还会采用差动电流的变比校正,以消除发电机或变压器的变比误差对差动保护的干扰。
此外,还可以通过差动电流的零序和负序成分的检测来区分故障类型,提高保护的选择性。
总之,纵联差动保护通过比较发电机或变压器两端的电流差异来检测差动故障,从而保护电力系统的安全运行。
它是一种常用且有效的保护方式,广泛应用于电力系统中。
纵联差动保护原理

纵联差动保护原理纵联差动保护是一种常用的电力系统保护方式,它主要用于保护输电线路和变电站设备,对于电力系统的安全稳定运行起着至关重要的作用。
纵联差动保护原理是基于电流的比较和判断,通过对电流进行差动比较,实现对设备内部故障的快速检测和定位,从而保护电力系统的安全运行。
首先,我们来了解一下纵联差动保护的基本原理。
在电力系统中,设备的正常运行需要保证电流的平衡和稳定。
当设备发生故障时,会导致电流不平衡,纵联差动保护就是利用这一点来实现对故障的检测和保护。
纵联差动保护装置会对设备的电流进行采样,并将采样值进行差动比较,当检测到电流不平衡时,就会发出保护动作信号,从而实现对设备的保护。
其次,纵联差动保护的实现需要考虑一些关键因素。
首先是采样精度和速度,高精度和快速的采样对于准确判断电流是否不平衡至关重要。
其次是保护装置的可靠性和稳定性,保护装置需要能够在各种复杂的工作环境下可靠地工作,确保对设备故障的快速响应。
另外,对于纵联差动保护的设计和参数设置也需要进行合理的考虑,以确保其在实际运行中能够有效地保护设备。
最后,纵联差动保护在实际应用中需要与其他保护装置配合工作。
在电力系统中,除了纵联差动保护外,还需要考虑过流保护、接地保护等其他保护方式,这些保护装置需要协同工作,共同保护电力系统的安全稳定运行。
因此,在设计和应用纵联差动保护时,需要考虑其与其他保护装置的配合,并进行合理的设置和调试,以实现对电力系统全面的保护。
综上所述,纵联差动保护原理是基于电流的差动比较,通过对电流的差异进行判断,实现对设备故障的快速检测和保护。
在实际应用中,需要考虑采样精度、保护装置可靠性、与其他保护装置的配合等关键因素,以确保纵联差动保护能够有效地保护电力系统的安全稳定运行。
纵联差动保护原理

一、发电机相间短路的纵联差动保护将发电机两侧变比和型号相同的电流互感器二次侧图示极性端纵向连接起来,差动继电器KD接于其差回路中,当正常运行或外部故障时,I1 与 I2 反向流入,KD的电流为11TAIn- 22TAIn=1I' - 2I'≈0 ,故KD不会动作。
当在保护区内K2点故障时, I1与 I2 同向流入,KD的电流为:11TAIn+ 22TAIn=1I' +2I'=2kTAIn当2kTAIn大于KD的整定值时,即1I' - (3)max max/unb st unp i k TAI K K f I n=≠0 ,KD动作。
这里需要指出的是:上面的讨论是在理想情况下进行的,实际上两侧的电流互感器的特性(励磁特性、饱和特性)不可能完全一致,误差也不一样,即nTA1≠nTA2,正常运行及外部故障时,2k TAI n ≥Iset ,总有一定量值的电流流入KD, 此电流称为不平衡电流,用Iunb 表示。
通常,在发电机正常运行时,此电流很小,当外部故障时,由于短路电流的作用,TA 的误差增大,再加上短路电流中非周期分量的影响,Iunb 增大,一般外部短路电流越大,Iunb 就可能越大,其最大值可达:.min.min .min()brk brk op ork brk op I I I K I I I >≥≤+式中:Kst ——同型系数,取;Kunp ——非周期性分量影响系数,取为1~; fi ——TA 的最大数值误差,取。
为使KD 在发电机正常运行及外部故障时不发生误动作, KD 的动作值必须大于最大平衡电流,即Iop=(Krel 为可靠系数,取)。
越大,动作值Iop 就越大,这样就会使保护在发电机内部故障的灵敏度降低。
此时,若出现较轻微的内部故障,或内部经比较大的过渡电阻Rg 短路时,保护不能动作。
对于大、中型发电机,即使轻微故障也会造成严重后果。
为了提高保护的灵敏系数,有必要将差动保护的动作电流减小,要求最小动作电流=(IN 为发电机额定电流),而在任何外部故障时不误动作。
纵联差动保护原理

纵联差动保护原理
纵联差动保护是一种电力系统中常用的保护方式,用于检测和保护主变压器、发电机、母线等重要设备的故障。
其基本原理是比较设备两侧电流的差值,当差值超过设定值时,即认为发生了故障,触发保护动作。
纵联差动保护的工作原理可以分为两个阶段:采样和比较。
首先,在设备两侧分别安装电流互感器,采样得到两侧电流的信号。
这些信号经过放大和调节后,送入差动继电器。
差动继电器进行差动计算,即计算两侧电流的差值。
如果差值低于设定值,差动继电器保持动作,表示系统正常。
但当差值超过设定值,差动继电器即判定为发生故障,触发保护装置的动作。
纵联差动保护的核心是差动继电器,其内部包含了一个差动计算单元和一个保护决策单元。
差动计算单元计算两侧电流的差值,并将结果送入保护决策单元。
保护决策单元根据计算结果,进行故障判定和相应的保护动作。
纵联差动保护的设计要考虑到系统的复杂性和可靠性。
在设计时,需要合理选择互感器的参数、差动计算的方式和设定值。
此外,还需要考虑到与其他保护装置的协调工作,使整个保护系统能够快速、准确地检测和定位故障,并采取适当的措施进行隔离和保护。
综上所述,纵联差动保护通过比较设备两侧电流的差值来检测和保护设备的故障。
它是一种重要的电力系统保护方式,能够有效地提升系统的可靠性和安全性。
电力系统各种保护特点
电力系统各种保护特点在电力系统中,为了确保电力设备的安全稳定运行,各种保护措施被广泛应用。
以下是七种主要的保护特点:一、差动保护差动保护是一种利用比较电力系统中两个或多个相同类型电气元件的电流或电压来实现保护的装置。
它具有反应速度快、保护范围明确、灵敏度高等优点,广泛应用于变压器、发电机、电动机等设备的保护。
二、纵联保护纵联保护是一种通过比较电力系统中两个或多个不同类型电气元件的电流或电压来实现保护的装置。
它具有保护选择性好、灵敏度高、动作速度快等优点,广泛应用于输电线路、母线等设备的保护。
三、距离保护距离保护是一种通过测量电力系统中两个或多个不同类型电气元件之间的距离来实现保护的装置。
它具有反应速度快、保护范围大、可靠性高等优点,广泛应用于输电线路、配电线路等设备的保护。
四、方向保护方向保护是根据电力系统中电流或电压的方向来确定故障位置并实现保护的装置。
它具有反应速度快、灵敏度高、可靠性高等优点,广泛应用于输电线路、配电线路等设备的保护。
五、零序保护零序保护是一种利用电力系统中三相电流或电压不平衡产生的零序电流或电压来实现保护的装置。
它具有反应速度快、灵敏度高、可靠性高等优点,广泛应用于变压器、发电机等设备的保护。
六、低频保护低频保护是一种利用电力系统中频率降低来检测故障并实现保护的装置。
它具有反应速度快、灵敏度高、可靠性高等优点,广泛应用于大型发电机组、炼油厂等设备的保护。
七、过电压保护过电压保护是一种利用电力系统中电压升高来检测故障并实现保护的装置。
它具有反应速度快、灵敏度高、可靠性高等优点,广泛应用于变压器、电动机等设备的保护。
三种电动机差动保护原理的分析
三种电动机差动保护原理的分析摘要:国内常用比率制动式纵差保护以及国外运用广泛的高阻抗差动保护和磁平衡差动的保护,针对电动机差动保护经常误动得现状,分析这三种差动保护的优缺点以及误动的原因。
关键词:电动机差动保护比率制动高阻抗磁平衡误动0 概述微机型电动机保护广泛应用于发电厂和大型厂矿企业, 一般电动机都装设综合保护,火力发电厂厂用电设计技术规定上规定2MW及以上的电动机以及2MW以下中性点具有分相引线的电动机,当电流速断保护灵敏性不够时应装设纵联差动保护,作为电动机的相间短路或匝间短路的主保护。
1 基于比率制动的纵差保护的动作原理及分析比率制动式纵差保护继电器的差动电流id和制动电流ires各为id= i1- i2=(1- 2)/naires=(i1- i2)/2=(1+ 2)/2na当差动保护区外短路时外部短路电流k•ou为1= 2= k•ou,id =0随着外部短路电流k•ou的增大,虽然不平衡电流和差动电流id均有所增加,但是制动电流ires随k•ou的线性增大继电器的动作电流也就相应的增大,从而达到保护不误动的目的,保护动作的判据:|I1-I2|≥Iset|I1-I2|≥K|(I1+ I2)/2|Iset为保护最小的动作电流,K为比率制动系数。
比率制动差动保护就是依靠动作电流和制动电流的动态变化,当两个判据同时满足使保护在区内故障灵敏动作。
接入差动保护的电流为设置在电动机三相电缆输入端(中压开关柜)及电动机的中性点的三组电流互感器二次三相电流,电动机差动保护由三个分相差动原件组成。
由于用于电动机的差动保护CT空间安装位置不同,造成二次回路阻抗大小不一致CT有不同的传变特性,在电动机启动或者外部短路时,容易引起差动保护误动。
所以比率制动差动保护引入比率制动系数K。
在实际情况中可以给差动元件80~100ms的动作延时,以便躲过电动机启动时的不平衡电流,防止电动机启动时保护误动也可以在保护装置中增加谐波制动。
纵联电流差动保护
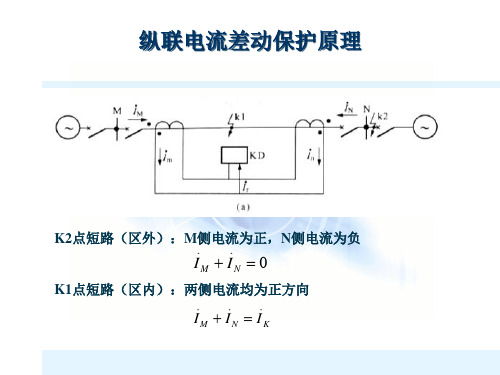
K2点短路(区外):M侧电流为正,N侧电流为负
IM IN 0
K1点短路(区内):两侧电流均为正方向
IM IN IK
Ires 0.5 Im In
Ires 0.5( Im In )
Ires Im In cosmn
(1) (2)比率制动方式 (3)标积制动方式
➢ 区外短路或正常运营时,(1)与(2)效果相同 ➢ 单侧电源内部短路,(1)与(2)效果相同,(3)更敏捷 ➢ 双侧电源内部短路,(1)更敏捷
U bc
负序电流滤过器
影响纵联电流差动保护正确动作旳原因
1.电流互感器旳误差和不平衡电流 2.输电线路旳分布电容电流及其补偿措施
3.负荷电流对纵联电流差动保护旳影响
不带制动特征
整定:
1.躲过外部短路时旳最大不平衡电流
I set Krel Knp Ker K st I kmax
2.躲过最大负荷电流
I set K I rel Lmax
两者取较大者
敏捷度:单侧电源运营内部短路时
K sen
Ir I set
I kmin I set
2
带制动线圈
动作线圈:取和电流 制动线圈:取循环电流
Im In Im In
动作方程:
Im In k Im In Iop0
制动特征:动作电流不是定值,而是随制动电流变化,称为制动特征。
两侧电流旳同步测量
基于数据通道旳同步措施
两侧电流旳同步测量
基于统一时钟旳同步措施
纵联电流相位差动保护
Hale Waihona Puke 负序电压滤过器U mn
R1
R1 jX
1
U
ab
jX 2 R2 jX 2
纵联电流差动保护【优质最全版】

K st
当两侧互感器的型号、容量相同时取0.5,不同取1。
K np
非周期分量系数。
Ik
外部短路时流过互感器的短路电流(二次值)。
可见:不平衡电流的大小和外部短路电流的大小有关,短路 电流越大,不平衡电流越大。
4.4.1 纵联电流差动保护原理
因此,差动保护的判据有两种思路: (1)躲过最大不平衡电流I,这种方法可以防止区外 短路的误动,但对区内故障则降低了差动保护的灵敏度;
1 纵联电流差动保护原理
纵联电流差动保护要求传输两端的电流相量,对传输设 制动线圈流过两侧互感器的电流之差(循环电流) ,
可见:不平衡电流的大小和外部短路电流的大小有关,短路电流越大,不平衡电流越大。 外部短路时穿过两侧电流互感器的实际短路电流 可以采用以下方法计算:
备的容量和速率都有较高的要求,并要求两端的数据要严 此时需要传递两端各自的相位信息,需要传递的信息量小。
(2)采用浮动门坎,即带制动特性的差动保护。
由纵联电流差动保护的原理可知,在外部短路情况下,输电线两侧一次电流虽然大小相等,方向相反,理论上其和为零,但由于电流
互感器传变的幅值误差和相位误差,使其和不再等于零,保护可能进入动作区。
k 2 因为区外故障时流过差动回路的不平衡电流与短路电流的大小有关系,短路电流小,不平衡电流也越小,因此可以根据短路电流的大
因为区外故障时流过差动回路的不平衡电流与短路电流的大小有关系,短路电流小,不平衡电流也越小,因此可以根据短路电流的大
小调整差动保护的动作门坎。
2)躲过最大负荷电流
I I K I I I 当两侧互感器的型号、容量相同时取0. mn
m n o0 p
4.4.1 纵联电流差动保护原理
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电动机纵联差动保护一、比率制动差动保护 (1)电动机二次额定电流1n TAI n =•(2)差动保护最小动作电流I s =K rel (·K cc ·K er +Δm )I nap K K rel ——可靠系数,取K rel =2ap K ——外部短路切除引起电流互感器误差增大的系数(非周期分量系数)=2 ap K K cc ——同型系数,电流互感器同型号时取K cc =0.5,不同型号时K cc =1 K er ——电流互感器综合误差取K er =0.1 Δm ——通道调整误差,取Δm =0.01~0.02I s =2 (2×0.5×0.1+0.02)I n =0.24 I n一般情况下,取I s =(0.25~0.35)I n ,当不平衡电流较大时,I s =0.4I n (3)确定拐点电流I t 有些装置中拐点电流是固定的,如I t = I n ;当拐点电流不固定时可取I t = (0.5~0.8)I n (4)确定制动特性斜率s 按躲过电动机最大起动电流下差动回路的不平衡电流整定最大起动电流I st ·max 下的不平衡电流I umb ·max 为I umb ·max =(·K cc ·K er +Δm ) I st ·maxap K =2,K cc =0.5,K er =0.1,Δm=0.02,I st ·max =K st I n (取I st =10)ap KI umb ·max =(2×0.5×0.1+0.02)10I n =1.2I n比率制动特性斜率为tn st sumb rel I I K I I K s −−=•maxK rel =2,当I s =0.3 I n ,I t =0.8 I n ,K st =72 1.20.30.3470.8n n n nI I s I I ×−==−一般取s =0.3~0.5 (5)灵敏系数计算电动机机端最小两相短路电流为(2)12K L I x x =•′+x ′- 电动机供电系统处最小运行方式时折算到S B 基准容量的系统阻抗标幺值 U B - 电动机供电电压级的平均额定电压U B =6.3(10.5)kV X L - 电动机供电电缆折算到S B 基准容量的阻抗标幺值制动电流(2)resTA2K I I n =相应的动作电流为(2)op s t TA 2KI I I S I n ⎛⎞=+−⎜⎟⎝⎠灵敏系数满足以下条件(2)senTA op1.5(2)K I K n I =≥ (6)差动速断动作电流按躲过电动机起动瞬间最大不平衡电流条件整定 I i =K rel I umb ·maxK rel – 可靠系数取K rel =3.5~4.5I umb ·max =1.2 I n 则I i =(3.5~4.5)×1.2 I n =(4.2~5.2) I n一般取I i =(4~6) I n 要求电动机机端两相短路时(2)senTA i1.2K I K n I =≥ (7)差流越限告警,取差流越限告警定值为15% I n ,告警延时一般装置内部固定(8)动作时限,差动保护本身不需设动作时限,但有的装置为躲暂过程而设了动作时限,此时可取动作时限0.03~0.05 s 。
比率制动特性曲线比率制动差动保护应注意的问题 (1)由于保护装置设在开关柜上,造成纵差保护两侧电流互感器二次电缆长度相差较大,特别是电动机离开关柜较远时情况更严重,这样电动机起动时两侧电流互感器由于二次阻抗不匹配,造成不平衡电流显著增大,甚至中性点电流互感器出现饱和,因此电动机纵差保护要特别注意两侧电流互感器二次阻抗匹配问题。
(2)若无法解决两侧电流互感器阻抗匹配的问题,需采用提高定值来躲过起动时的误差(误动),则宜采用适当增大比率制动斜率,而不宜采用提高最小动作电流的措施,或者分别设起动、正常运行差动保护,分别整定,但有的保护装置不能实现。
(3)当无法解决两侧电流互感器匹配的问题,同时要提高灵敏系数时,可考虑采用磁平衡差动保护,动作电流只需躲过电动机的每相电容电流即可。
(4)为减小差动回路的不平衡电流,容量较大的电动机宜采用二次额定电流为1A 的电流互感器。
(5)加强差动二次回路的检查与维护,避免电流互感器二次开路现象,如出现电流互感器二次开路,则宜闭锁差动保护。
二、磁平衡纵差保护磁平衡纵差保护原理接线图(1)电动机的磁平衡纵差保护可灵敏反应定子绕组的相间短路故障(含定子绕组对另两相中性点短路),不反应定子绕组的匝间短路和定子绕组的断相故障,就反应故障类型来说,与常规纵差保护无区别,但电动机起动、外部短路故障电动机的反馈电流、外部短路故障切除自起动过程中不会形成不平衡电流,这与常规纵差保护不同。
对外部单相接地故障,有不大的不平衡电流。
(2)电动机外部单相接地设AU U e -j120ºU e j120º,三相负序电压为U由定子绕组每相正序电容C M1,每相零序电容C M0形成的电流仅流过电动机始端,构成磁平衡差动保护的不平衡电流umb A M1M03U U I j C j C j C ϕϕωωω== U-120-30-30umb B M1M0M0(3e j j U U U I j C j C C ϕϕωωω°°=−=+ j °12030210umb C M0M0(3ej j U U U I j C j C C ϕϕωωω°°=−=+ j °M1M03C C C ϕϕ=+C ϕϕ为定子绕组相间电容umb umb B umb C ||||I I I === (3)磁平衡纵差保护动作电流op rel I K =K rel – 可靠系数取1.1~1.3对于同步电动机定子绕组每相零序电容(即对接地电容)可由下式计算M00.84C = (/)f ph μ式中k – 由绝缘材料确定的系数,当采用B 级绝缘时K =0.0187S n – 电动机额定容量,MV A U N – 电动机额定电压,kV 由于 则M1M03C C C ϕϕ=+M00.2C C ϕϕ≈M1M01.6C C =op rel rel M0U I K K ==K rel =1.2rel M0 1.31jN K C U ω=×则I op =(1.2×1.31)ωC MO U jN =1.572×ωC MO U jN如P N =2500kW , 2.5 3.125cos 0.8N N P S ϕ=== MV AM00.840.01870.0165C =××= (/)f ph μI op =1.572×314×0.165×6.3 =51.3A 51.3/300.7≈17% I op 约为电动机额定电流的17%为躲过电容暂态过程的影响,保护设100~120 ms 延时 (4)定子绕组单相接地当供电网络中性点不接地或经消弧线圈接地时,电动机定子绕组单相接地D M03()U I C C ωα∑=−式中α- 接地点到电动机定子绕组中性点的匝数与定子绕组-相匝数之比C ∑- 供电网络每相对地总电容当网络中性点经电阻R 接地时电动机定子绕组单相接地D U I ≈ 式中R – 接地电阻,其他符号与上式相同I D 小于电动机外部单相接地电流I op ,所以磁平衡差动保护不会动作,当供电电网中性点经电阻接地时,电动机定子绕组单相接地磁平衡差动保护是否动作与电动机容量、中性点接地电阻大小、接地点位置有关。
一般电动机容量小,接地点接近机端时该保护会动作,电动机容量较大时,一般不会动作。
磁平衡差动保护应注意的问题(1)电动机起动过程中不会在磁平衡差动保护中产生不平衡电流,因而动作电流只需躲过外部单相接地时形成的不平衡电流,一般情况下动作电流为(15%~20%)电动机额定电流,所以灵敏系数比常规比率制动保护大为提高,提升了电动机纵差保护性能。
(2)电动机磁平衡差动保护性能远优于比率制动差动保护,定子绕组相间短路故障的死区也远比常规比率制动差动小,而且整定计算简单。
在开关柜与电动机间相距较远时(场合),应优先使用这种差动保护。
(3)电流互感器参数应认真选定,其容量可取15~20V A ,二次额定电流宜取1A ,一次额定电流宜取较大值,以保护最严重短路情况下不发生饱和。
(4)按技术规程要求,除磁平衡纵差保护外,还应在开关柜上装设电动机综合保护,对供电电缆上的短路故障与电动机的故障进行保护。
(5)当电动机磁平衡纵差保护电流互感器处配有零序电流互感时,则构成的零序电流保护在动作电流,动作时限上应与开关柜上综合保护中的零序电流保护配合。
三、高阻抗差动保护(SPAE010,011)高阻抗差动保护应对于各种区外故障具备稳定性,正是差动回路中的电阻起到这种稳定作用。
在SPAE010及SPAE011中稳定电阻内置在继电器中,并与测量互感器串联,因此称为高阻抗型保护(见图1及图2)。
(1)高阻抗继电器的动作电流值应躲过任何区外故障引起的差动电流值(对于电动机保护则应躲过电动机起动电流值)。
在保护区内发生故障时两边电流互感器向差动回路馈入电流保护动作。
(2)保护的灵敏性和可靠性取决于电流互感器特性。
对于高阻抗差动保护,两组电流互感器的变比应相等,高阻抗保护中应使用PX 级的低漏磁电流互感器,其技术特性可通过拐点电压U K ,拐点处的励磁电流I e 及二次绕组电阻R 2定义。
(拐点电压是在电流互感器的二次侧测得的励磁电压,即当励磁电压增加10%时,励磁电流增加50%的那一点的励磁电压),见图3。
(3)区内故障情况下,流过差动回路的电流必须足以使继电器动作,拐点电压U K 应大于2倍的穿越故障所需的稳定电压U s :U K =kU s=2×I k max /n TA (R 2+R m ) 式中 U K – 拐点电压; I k max – 最大穿越故障电流(电动机起动电流); U s – 稳定电压; n TA –电流互感器变化; R 2 – 电流互感器二次绕组内阻;R m –最大测量回路的总电阻。
保护动作时间无延迟时系数K =2,建议使用的电流互感器二次内阻与测量回路的电阻一样大R 2=R m ,以避免拐点电压过高。
(4)励磁电流I o (拐点电压处电流互感器的励磁电流)I o =[(I prim / n TA )-(I r +I u )]/m式中 I prim – 保护装置动作的一次侧电流; I r – 继电器整定值;I u – 通过保护电阻的电流;n TA –电流互感器的变比;m –属于保护的每相电流互感器的数目。