大地测量学课程设计matlab编程
测绘专业MATLAB程序设计教学实践
3. 课程设计 课程在地理信息机房开设。在课程开始之前,教师预先在
每台学生用计算机上安装相关软件,包括虚拟机及 Linux 系统, MATLAB。这里的 Linux 系统选用 Fedora 6 或以上版本,并 共享某天的 IGS 跟踪站观测文件作为实验数据。课堂教学时 间主要由教师演示,学生同步编写代码的方式完成教学任务。 在学生完成代码之后,教师针对学生出现的问题进行一对一辅 导和答疑。
1. 引言 全球卫星导航系统精密定位及其应用是测绘工程专业硕士
开设的选修课,是一门双语课程。课程目的是介绍全球卫星导 航系统,包括 GPS,GLONASS,Galileo 和 BeiDou 在内的四 大系统的发展,组成,原理及应用,使学生掌握全球卫星导航 系统定位基本原理,并通过计算机程序语言完成相关软件开发 任务。该课程共 3 学分 48 个学时,将这 48 个学时分为三个部 分,分别是 24 学时的课堂时间,12 学时的讨论课时和 12 学 时的上机实验课时。在 12 学时的上机实验课中,设计了一次 MATLAB 实验。本文将详细描述 MATLAB 实验课的设计方 法和具体实践内容,为测绘程序设计课程提供参考。
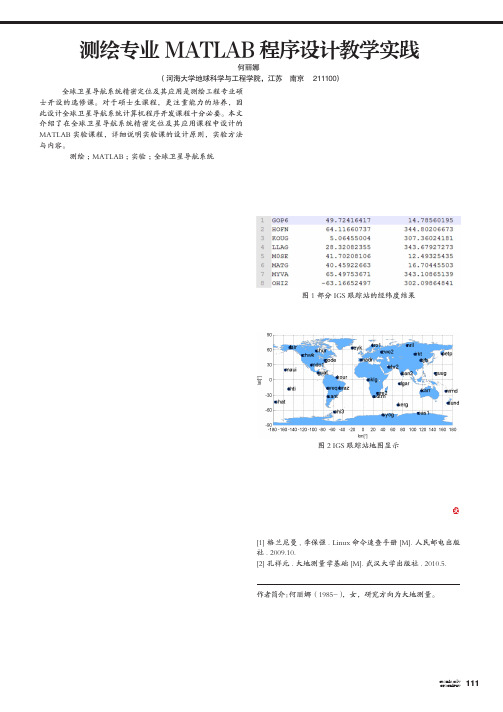
第三步,利用空间直角坐标系转换到大地坐标系的方法, 获得每个跟踪站在大地坐标系下的经纬度信息。如图 1 所示。
地质学matlab课程设计

地质学matlab课程设计一、课程目标知识目标:1. 理解地质学中基本的数据处理与分析方法,并掌握运用MATLAB软件进行地质数据的操作;2. 学习运用MATLAB进行地层面、断层、地震数据等地质信息的可视化;3. 了解MATLAB在地质统计分析、地球物理勘探等领域的应用。
技能目标:1. 能够运用MATLAB软件进行地质数据的读取、处理、分析与结果输出;2. 培养学生利用MATLAB解决实际地质问题的能力,提高数据处理和编程技能;3. 培养学生将MATLAB应用于地质学领域的研究与创新能力。
情感态度价值观目标:1. 培养学生对地质学及MATLAB应用的兴趣,激发学生的求知欲和探索精神;2. 增强学生团队协作意识,培养学生严谨的科学态度和良好的学术道德;3. 通过地质学MATLAB课程的学习,使学生认识到科学技术在地质学领域的重要作用,提高学生的社会责任感和使命感。
课程性质:本课程为地质学专业选修课,旨在通过MATLAB软件的学习,提高学生对地质数据的处理与分析能力。
学生特点:学生具备一定的地质学基础知识,对MATLAB软件有一定了解,但实际应用能力有待提高。
教学要求:结合地质学实际案例,注重理论与实践相结合,提高学生的实际操作能力和解决问题的能力。
通过课程学习,使学生能够将MATLAB软件应用于地质学研究和实践。
二、教学内容1. 地质数据基本概念与MATLAB软件入门- 地质数据类型与特点- MATLAB软件安装与界面认识- MATLAB基本操作与编程规范2. 地质数据读取与处理- MATLAB读取地质数据文件(如CSV、TXT等)- 数据清洗与预处理方法- 地质数据插值、拟合与平滑处理3. 地质数据可视化- MATLAB绘图功能简介- 地层面、断层、地震数据可视化- 三维地质数据可视化技术4. 地质统计分析与应用- 常用地质统计方法(如相关性分析、回归分析等)- MATLAB实现地质统计分析- 地质统计在实践中的应用案例5. 地球物理勘探与MATLAB应用- 地球物理勘探方法简介- MATLAB在地球物理数据处理与分析中的应用- 实际案例分析与讨论6. MATLAB在地质学领域的研究与拓展- MATLAB在地质模型构建中的应用- MATLAB在地质学前沿研究中的作用- 学生研究项目展示与讨论教学内容安排与进度:本课程共计18周,每周2课时。
matlab大地测量空间直角坐标转换程序设计

一、实验目的 不同坐标系下空间直角坐标转换是测量工程中经常会遇到的问题,本实验 通过编写空间直角坐标七参数转换的程序,并对格式化文件数据进行计算,验 证程序,从而掌握空间直角转换的基本原理和方法。 二、实验内容: 1、空间直角坐标转换七参数模型(布尔莎模型) 布尔莎 -沃尔夫模型(在我国通常被简称为布尔莎模型 )又被称为七参数转换 (7-Parameter Transformation)或七参数赫尔墨特变换(7-Parameter Helmert Transformation) ,其数学公式为:
0 1 R1 ( X ) 0 cos X 0 sin X
cos Y 0 sin X R2 ( Y ) 0 cos X sin Y
0 sin Y 1 0 0 cos Y
cos Z R3 ( Z ) sin Z 0
七参数计算函数 TtransParam7_Comp 如下:
%由空间直角坐标求解七参数 x0,y0,z0,a1,a2,a3,a4 function Param7 = TtransParam7_Comp (x1,y1,z1,x2,y2,z2)
A=[x1,y1,z1,x2,y2,z2]; [m,n]=size(A); B=zeros(3*m,7);%创建一个 3m 行, 7 列的零矩阵 B L=zeros(3*m,1);%创建一个 3m 行, 1 列的零矩阵 L for i=1:m
-2-
B(3*i-2:3*i,:)=[1 0 0 x1(i) 0 -z1(i) y1(i); 0 1 0 y1(i) z1(i) 0 -x1(i); 0 0 1 z1(i) -y1(i) x1(i) 0] %for 循环组成 B 矩阵 L(3*i-2:3*i,:)=[x2(i),y2(i),z2(i)] %for 循环组成 L 矩阵 end gX=(inv(B'*B))*B'*L %计算误差方程的系数 %由 WGS-84 空间直角坐标和 BJ-54 空间直角坐标列方程组, %根据最小二乘法 VTPV=min 的原则,可列出法方程为求得布尔莎七参数 %根据求得的七参数通过反算,可将 WGS-84 空间直角坐标转化为 BJ-54 空间直角坐标 m=gX(4)-1; ex=(gX(5)/gX(4))*180/pi*3600; ey=(gX(6)/gX(4))*180/pi*3600; ez=(gX(7)/gX(4))*180/pi*3600; Param7=[gX(1),gX(2),gX(3),ex,ey,ez,m];%组成布尔莎七参数矩阵 End
Matlab语言及应用实验指导书
《Matlab语言及应用》上机实验指导书吉林大学地球探测科学与技术学院地球化学系2010年实验一MATLAB应用开发环境目的与要求(1)熟悉MATLAB桌面。
(2)掌握命令窗口的使用方法。
(3)了解MATLAB的帮助系统。
(4)基本掌握在MATLAB命令窗口中进行语言要素的基本操作。
实验准备(1)了解MATLAB的安装的软硬件要求。
(2)了解MATLAB的基本特征和基本语法。
(3)主要窗口的基本功能。
实验内容1.使用命令窗口启动MATLAB。
从“Desktop”菜单中选择Desktop layout->default,恢复MATLAB窗口的缺省设置。
Command Windows窗口中练习如下操作:(1)变量与基本运算(2)向量与矩阵的处理(3)常用数学函数(4)程序流程控制提示:在输入过程中注意符号的中文和西文的不同,Matlab语言使用的均为西文的符号。
(5) M文件首先,建立自己的工作目录mywork,然后利用File菜单中的Set Path将mywork目录添加到Matlab的搜索路径中。
利用MATLAB的M文件编制器,建立如下命令行文件:%This ls my first test M—file.%Roger Jang,March 3,1997fprintf('Start Of test.m!\n');for i=1:3,fprintf('i=%d-->i^3=%\n’,i,i^3);endfprintf('End of test.m!\n');以test1.m为文件名,保存在mywork目录中。
在命令窗口中键入test1 后执行,结果如下: Start of test.m!i=l ---> i^3=1i=2 ---> i^3=8i=3 ---> i^3=27End of test.m!按上述方法建立函数文件如下:function output=fact2(n)%FACT2 Calculate factorial of a given positive integer(recursive Version)if n==1 %Terminating conditionoutput=l;return;endoutput=n*fact2(n-1);以fact2.m为文件名,保存在mywork目录中。
测绘 matlab 编程 程序

导线网严密平差 完整程序代码及注释已知数据已知点坐标:XA=730.024 ,YA=126.040 ,111.855=XB,232.172=Y B应得结果 = 5.30表七:实际结果点号X(m) Y(m) 中误差X(mm) 中误差Y(mm) 点位中误差1 678.1641 287.3411 3.3868 5.8737 7.60782 564.6919 446.8827 6.0102 7.5137 9.19373 533.8468 629.2749 8.7985 7.3927 10.05964 475.6776 535.8728 7.3949 8.4987 9.96675 499.1408 374.4231 5.8076 7.6840 9.18276 594.6190 176.7976 5.2308 3.4068 7.34757 826.3848 305.7569 2.7439 5.4473 7.15518 767.8778 401.8510 4.8371 6.3810 8.37349 745.7230 531.0410 6.8992 6.6276 9.194710 671.6256 650.8637 9.0695 6.0533 9.722011 794.2833 600.4688 8.4994 6.1800 9.578412 859.0528 511.5349 6.7399 6.6874 9.160813 898.2695 399.0763 4.7580 6.4207 8.358614 919.3459 276.9409 3.1903 4.8006 7.0670单位权中误差: 5.3393详细代码% 贡XX导线严密平差程序clear;clc;% 从文件中输入数据% S1 观测角度数据% 【角号度分秒左点角点右点】-1为已知点B,0为已知点A fid1=fopen('S1.txt','rt');[S1,~]=fscanf(fid1,'%f ',[7 24]);fclose(fid1);S1=S1';% S2 边长观测值% 【边号距离测边中误差对应角号】fid2=fopen('S2.txt','rt');[S2,~]=fscanf(fid2,'%f ',[5 17]);fclose(fid2);S2=S2';% S3:度分秒到角度[S3]=dfm2jd(S1);% 计算坐标近似值% X0=[x1 y1 x2 y2 ......][X0]=zbjs(S2,S3);% 循环,未知参数改正量最大值mx<0.01mm停止mx=100;while mx>0.01% 计算B,l,P 矩阵[B,l,P]=BBll(X0,S2,S1,S3);% P68页x=(B'*P*B)\B'*P*l;% 改正量mx=max(x);v=B*x+l;[rr,cc]=size(B);m0=sqrt((v'*P*v)/(rr-cc));% 单位权中误差Q=inv(B'*P*B);% 协因数阵M=m0^2*Q;% 未知数方差矩阵% 平差后坐标X=X0'+x/1000;X0=X';end% 坐标中误差for i=1:28det(i)=sqrt(M(i,i));end% 点位中误差for i=1:14ddet(i)=2.5*sqrt(det(i*2-1)+det(i*2));endddet=ddet';% 整理数据,输出最终结果for i=1:14XX(i,1)=X(2*i-1);XX(i,2)=X(2*i);DD(i,1)=det(2*i-1);DD(i,2)=det(2*i);endjieguo(:,1)=1:14;jieguo(:,2)=XX(:,1);jieguo(:,3)=XX(:,2);jieguo(:,4)=DD(:,1);jieguo(:,5)=DD(:,2);jieguo(:,6)=ddet;disp('计算完成!')fid=fopen('输出结果.txt','wt');fprintf(fid,'点号 X(m) Y(m) 中误差X(mm) 中误差Y(mm) 点位中误差 \n');fprintf(fid,' %2d %11.4f %11.4f %5.4f %5.4f %5.4f\ n',(jieguo)');fprintf(fid,'单位权中误差:%8.4f',(m0)');fclose(fid);====================================================% 单位转换function [S3]=dfm2jd(S1)for i=1:24S3(i,1)=S1(i,1);S3(i,2)=(S1(i,2)+S1(i,3)/60+S1(i,4)/3600);End====================================================% 计算坐标近似值function [X0]=zbjs(S2,S3)% 起始数据X10=[730.024;126.040;855.111;172.232];X0=zeros(1,28);% 预分配内存% 已知边方位角t=180+atand((X10(2)-X10(4))/(X10(1)-X10(3)));% 下方闭合% 起始方位角t1=t;for i=1:1:6% 计算各边方位角if S2(i,5)>0 % i=4t1=t1+S3(S2(i,4),2)+S3(S2(i,5),2)-180;% 边4方位角+角6+角7-180 elset1=t1+S3(S2(i,4),2)-180;endif t1<0t1=t1+360;end% 计算各点近似坐标if i<2X0(1)=X10(1)+S2(1,2)*cosd(t1);X0(2)=X10(2)+S2(1,2)*sind(t1);endif i>=2X0(2*i-1)=X0(2*(i-1)-1)+S2(i,2)*cosd(t1);X0(2*i)=X0(2*(i-1))+S2(i,2)*sind(t1);endend% 上方闭合% 起始方位角t2=t;t2=t2-S3(12,2);if t2<0t2=t2+360;endfor i=8:1:15% 计算个边方位角if i<9 % i=8X0(2*(i-1)-1)=X10(3)+S2(i,2)*cosd(t2);X0(2*(i-1))=X10(4)+S2(i,2)*sind(t2);endif i>8t2=t2+S3(S2(i,4),2)-180;if t2<0t2=t2+360;end% 计算各点近似坐标X0(2*(i-1)-1)=X0(2*(i-2)-1)+S2(i,2)*cosd(t2); X0(2*(i-1))=X0(2*(i-2))+S2(i,2)*sind(t2);endend==================================================== % 计算方位角function [M]=fangweijiao(a,b,X0)X10=[730.024;126.040;855.111;172.232];% 确定边对应两点类型及坐标。
matlab数学实验课程设计

matlab数学实验课程设计一、教学目标本课程的教学目标是使学生掌握MATLAB的基本使用方法,能够利用MATLAB进行数学实验,从而加深对数学知识的理解和应用能力。
知识目标包括:掌握MATLAB的基本语法和操作;能够运用MATLAB进行线性代数、微积分、概率论等数学运算;了解MATLAB在数学建模和数据分析方面的应用。
技能目标包括:能够独立设置MATLAB的工作环境;能够编写简单的MATLAB脚本进行数学实验;能够利用MATLAB进行数学问题的求解和分析。
情感态度价值观目标包括:培养学生的创新意识和实践能力;增强学生对数学学科的兴趣和好奇心;培养学生团队合作和交流分享的良好学习习惯。
二、教学内容根据课程目标,教学内容主要包括MATLAB的基本使用、数学实验两个部分。
MATLAB的基本使用包括:MATLAB的安装和启动、工作环境设置、基本语法和操作。
数学实验包括:线性代数实验、微积分实验、概率论实验等。
具体的教学大纲如下:1.MATLAB的基本使用:第1-3周,每周2课时,共6课时。
主要讲解MATLAB的安装和启动、工作环境设置、基本语法和操作。
2.线性代数实验:第4-6周,每周2课时,共6课时。
主要内容包括矩阵运算、线性方程组求解、特征值和特征向量计算等。
3.微积分实验:第7-9周,每周2课时,共6课时。
主要内容包括函数图像绘制、极限和导数的计算、积分运算等。
4.概率论实验:第10-12周,每周2课时,共6课时。
主要内容包括随机数生成、概率分布函数计算、统计量计算等。
三、教学方法本课程采用讲授法、实验法、讨论法相结合的教学方法。
讲授法用于讲解MATLAB的基本使用和数学理论知识;实验法用于让学生亲自动手进行数学实验,加深对知识的理解和应用能力;讨论法用于引导学生进行思考和交流,培养学生的创新意识和团队合作能力。
四、教学资源教学资源包括教材、多媒体资料、实验设备等。
教材选用《MATLAB数学实验》一书,多媒体资料包括PPT课件和实验指导视频,实验设备包括计算机和MATLAB软件。
大地测量MATLAB实验坐标正反算程序设计

实验三坐标正反算一、实验目的编写坐标正反算程序,并对格式化文件数据进行计算,验证程序。
二、实验内容及步骤:1、编写坐标正算程序要求:1)建立以xy_direct命名的函数,函数输入输出格式为[x2,y2] = xy_direct(x1,y1,distance, azimuth)2) 对文件data1.txt中数据进行坐标正算,并将已知点和计算点坐标按照格式存贮在文件data2.txt中,data1.txt格式为:x1 y1 距离方位角(dd.mmss)data2.txt格式为:x1 y1 x2 y2编写程序共三个模块,分三个m文件组成,各m文件内容如下:1)主运行程序clear;clc;[filename, pathname]= uigetfile('*.*'); % 文件查找窗口file=fullfile(pathname, filename); % 合并路径文件名A=importdata(file);dms=A.data(:,4); %提取A.data中所有行和第4列azimuth=dms2rad(dms); %度分秒转化成弧度[x2,y2]=xy_direct(A.data(:,1),A.data(:,2),A.data(:,3),azimuth(:,1));B=[A.data(:,1),A.data(:,2),x2,y2]; %输出得到B矩阵fid=fopen('fileout','wt'); %写入文件路径fprintf(fid,' x(m) y(m) x2(m) y2(m)\n' ); fprintf(fid,'%f\t%f\t%f\t%f\n',B(:,1:4)');fclose(fid);2)xy_direct程序如下:function [x2,y2] = xy_direct(x1,y1,distance, azimuth)%求x2,y2函数x2=x1+distance.*cos(azimuth);y2=y1+distance.*sin(azimuth);end3)度分秒转弧度函数function azimuth=dms2rad(dms)%度分秒转弧度函数dms_abs=abs(dms);dgree=fix(dms_abs);min_tem=(dms_abs-dgree)*100;min=fix(min_tem);second=(min_tem-min)*100;azimuth=(dgree+min/60+second/3600)*pi/180;if dms<0azimuth=-azimuth;elseazimuth=azimuth;endreturn运行程序所得data2内容如下:2、编写坐标反算程序要求:1)建立以xy_inv命名的函数,函数输入输出格式为[distance, azimuth] = xy_inv(x1,y1, x2,y2)2) 对文件data2.txt中数据进行坐标反算,并将计算结果按照格式存贮在文件data3.txt中,Data3.txt格式为:x1 y1 x2 y2 距离方位角(dd.mmss)坐标反算程序共三个模块,分三个m文件组成,各m文件内容如下:1)主运行程序:clear;clc;[filename, pathname]= uigetfile('*.*'); % 文件查找窗口file=fullfile(pathname, filename); % 合并路径文件名A=importdata(file);for i=1:4[distance(i),azimuth(i)]=xy_inv(A.data(i,1),A.data(i,2),A.data(i,3),A.data(i,4));%提取data数据;dms(i)=rad1dms(azimuth(i)); %rad-->dmsendB=[A.data(:,1),A.data(:,2),A.data(:,3),A.data(:,4),distance',dms'];%输出得到B矩fid=fopen('data3.txt','wt'); %写入文件路径fprintf(fid,'x1 y1 x2 y2 距离方位角(dd.mmss)\n' );[m,n]=size(B); %输入矩阵m,n取行列号for i=1:mfor j=1:nif j==nfprintf(fid,'%f\n',B(i,j));elsefprintf(fid,'%f\t',B(i,j));endendendfclose(fid);2)xy_inv程序如下:function [distance, azimuth] = xy_inv(x1,y1, x2,y2)distance=sqrt((x2-x1)^2+(y2-y1)^2);if (x2-x1)~=0azimuth=atan(abs((y2-y1)/(x2-x1)));%求弧度值%判断象限if (x2-x1)>0&(y2-y1)>0azimuth=azimuth;elseif (x2-x1)>0&(y2-y1)==0azimuth=0;elseif (x2-x1)<0&(y2-y1)>0azimuth=pi-azimuth;elseif (x2-x1)<0&(y2-y1)==0azimuth=pi;elseif (x2-x1)<0&(y2-y1)<0azimuth=pi+azimuth;elseif (x2-x1)>0&(y2-y1)<0azimuth=2*pi-azimuth;endelseif(y2-y1)>0azimuth=pi/2;elseazimuth=3*pi/2;endend3)弧度转度分秒函数function dms=rad1dms(azimuth)%弧度转度分秒dgree_tem=azimuth*180/pi;dgree=fix(dgree_tem);min_tem=((dgree_tem-dgree)*60);min=fix(min_tem);second=((min_tem-min)*60);dms=dgree+min/100+second/10000;end运行程序所得data3内容如下:。
MATLAB在测绘工程课程中的应用研究毕业论文
南阳师范学院20XX届毕业生毕业论文(设计)题目:MATLAB在测绘工程课程中的应用研究完成人:班级:学制:专业:测绘工程指导教师:完成日期:目录摘要 (1)测绘科学就是地球空间信息学。
它是信息科学的一个分支,是地球信息科学的基础。
是一门以大学科如测量平差、地理信息系统、遥感图像处理、坐标换算规模数据甚至是海量数据处理、分析与应用为基础的学科,其各项分支等,都涉及大量的数据处理[1]。
(1)1 Matlab 的简介及优势 (2)Matlab的特点及功能 (2)高效 (2)可视化 (2)易学易掌握 (2)功能丰富 (2)Matlab系统的优势 (3)编程环境 (3)简单易用 (3)强处理能力 (3)图形处理 (4)2 Matlab在测绘工程课程中的具体应用 (4)Matlab在测绘数据处理上的应用 (4)Matlab测绘数据处理程序设计思想 (4)用于坐标换算 (5)线性方程组的解算 (5)Matlab在地理信息系统上的应用 (6)Matlab在遥感图像处理上的应用 (6)Matlab 在误差与测量平差的应用 (7)4 小结 (9)参考文献 (10)MATLAB在测绘工程课程中的应用研究摘要:介绍了Matlab 的特点、功能。
具有高性能数值计算的高级算法和强大的绘图能力具有高性能数值计算的高级算法;特别适合矩阵代数领域:有大量事先定义的数学函数,并且有很强的用户自定义函数的能力;有强大的绘图功能以及具有教育、科学和艺术学的图解和可视化的二维、三维图。
把Matlab应用于测绘工程课程中的数据处理、地理信息系统、遥感图像处理误差与平差等方面;探究其处理方法及过程。
最后指出了在测绘工程课程中应用Matlab巨大优势,减轻了对学生编程水平的要求,提高了学生的学习兴趣,加强了教学效果,还可以用于成果的可视化显示。
表明Matlab语言为测绘工程专业教学提供了强有力的工具,使用该语言对测绘工程课程必将达到事半功倍的效果,也为测绘学生今后提供广阔空间。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
大地测量学课程设计坐标系转换与局部坐标选择学院:矿业工程专业班级:测绘工程12-02学生姓名:***指导教师: 1 2前言:大地测量学是测绘学的一个分支。
研究和测定地球形状、大小和地球重力场,以及测定地面点几何位置的学科。
它的基本任务是研究全球,建立与时相依的地球参考坐标框架,研究地球形状及其外部重力场的理论与方法,研究描述极移固体潮及地壳运动等地球动力学问题,研究高精度定位理论与方法。
大地坐标系是大地测量的基本坐标系。
大地坐标系中点的位置是以其大地坐标表示的,大地坐标均以椭球面的法线来定义。
其中,过某点的椭球面法线与椭球赤道面的交角为大地纬度;包含该法线和大地子午面与起始大地子午面的二面角为该点的大地经度;沿法线至椭球面的距离为该点的大地高。
大地纬度、大地经度和大地高分别用大写英文字母B、L、H表示。
椭球面大地测量学研究的主要问题是:椭球面上大地线和法截线的性质;椭球面三角形的解算;大地测量主题的解算;椭球面投影到平面上的问题,以便将大地坐标换算为平面坐标;一椭球面同另一椭球面的关系,以实现不同大地坐标系的换算。
本文主要研究坐标转换及其投影问题的分析和结算。
目录摘要 (3)1.设计要素 (5)1.1设计目的 (5)1.2设计任务及要求 (5)1.3设计安排 (6)1.4设计概要 (6)2理论基础 (7)2.1四参数转换 (7)2.2坐标系统54与80转换 (7)2.3高斯坐标正反算 (9)2.4局部坐标与系统坐标转换 (9)2.5 matlab简述 (14)3内容成果及整理 (15)3.1原始数据 (15)3.2求解参数 (15)3.3求出54与80坐标 (16)3.4计算54与80坐标经纬度坐标 (17)3.5测区中心范围确定及相关数值和综合变形 (18)3.6局部坐标系统选择 (19)3.7局部坐标结果 (19)4课程设计收获与体会 (21)5附录 (22)5.1求解参数源代码 (22)5.2坐标转化源代码 (23)正算 (23)反算 (24)直角坐标相互转换 (25)直角坐标转经纬度 (26)5.3 散点图确定局部坐标系统源代码 (27)5.4中央子午线源代码 (27)5.5求抵偿面高程源代码 (28)5.6长度综合变形源代码 (29)5.7求局部坐标源代码 (29)6参考文献 (31)摘要:大地坐标系是大地测量的基本坐标系。
常用于大地问题的细算,研究地球形状和大小,编制地图,火箭和卫星发射及军事方面的定位及运算,若将其直接用于工程建设规划、设计、施工等很不方便。
所以要将球面上的大地坐标按一定数学法则归算到平面上即采用地图投影的理论绘制地形图,才能用于规划建设。
从而大地坐标与平面直角坐标的转化便可通过高斯投影的正反算来实现。
北京54全国80及WGS84坐标系(WGS一84 Coordinate System)的相互转换。
按高斯投影6度分带或3度分带所建立的高斯平面坐标系统通常称为国家统一坐标系统。
除此之外,虽然高斯投影保证了角度不变,但是在长度上仍存在较大的变形,为控制误差的积累与放大以及测图、控制、GIS 数据处理等的需要,这就要求我们掌握高斯投影的分带换算。
选择工程局部坐标系统可也以有效地控制投影长度变形在一定精度范围内,这对于大比例尺测图和工程测量十分有利。
本文在讨论正反算后对局部坐标系统的坐标选择与坐标转换也进行了分析,并围绕实例讲述了其应用。
关键词:四参数求解54与80坐标转换高斯正反算综合变形Summary:Geodetic coordinate system is the basic system of coordinates of monly used in geodetic problem carefully, study of the earth's shapeand size, map compilation, positioning and operational rocket and satellite launch and military aspects, if it is directly usedfor engineering construction planning,design, construction and other inconvenient.So to geodetic coordinates on the surface according to a certain mathematical algorithms to calculate plane which uses map projection theory topographic maps, can be used for planning and construction. Beijing 54 national 80 and WGS84 coordinate system (WGS 84 Coordinate System) conversion. Aninternationally adopted the geocentric coordinate system. In addition, although the Gauss projection guaranteesthe angle unchanged, but there are still largedeformation in length, needto control the error accumulation and magnification and mapping, control, GIS data processing, zoning conversion this requires us tograsp the Gauss projection. This paper discussed in the coordinate selection andconversion of coordinates to the local coordinate system of the positive and negative were also analyzed, and examples of its application on.Keywords:The four parameter solution , 54 and the 80 coordinate transformation Gauss considered the pros and cons , Integrated deformation1.设计要素1.1设计目的1) 1:500测图的地面观测边长不用经过归算和改化直接绘图。
2)每公里距离综合改正小于2cm3)计算测区范围的平均经纬度,用于整个参数计算测区。
4)选择中央子午线和高程抵偿面。
5)换带计算1.2设计任务及要求1.2.1 任务《大地测量学课程设计》是在《大地测量学基础》课理论知识教学完成后进行的,旨在培养学生解决大地坐标系建立与转换工程问题能力的实践性教学环节。
《大地测量学课程设计》的目的是通过课程设计巩固已学的理论知识,使学生建立起大地坐标系建立与转换的概念;培养建立大地测量坐标系与进行各类坐标系转换的能力;同时也是对学生进行规范化技术说明文书写能力培养的一次实践教学活动。
本设计的先修课程为:《测量学基础与数字测图原理》、《误差理论与测量平差》、《VB程序设计》等。
1.2.2 要求1)设计应对原坐标系统存在的缺点或不足进行分析,说明设计新坐标系或进行坐标系转换的必要性。
2)对建立新坐标系或进行坐标系转换所用的理论原理或数学模型进行论述与精化。
3)设计新坐标系或坐标系转换模型,并用手工(提倡)或软件实现。
其中,设计的新坐标系应有具体的投影面,投影带中央子午线位置,并且应把旧坐标系统下的坐标数据转换至新设计的坐标系统下,可采用手工计算,也可编程计算。
1.3设计安排1)设计时间:教学计划规定,大地测量学课程设计时间为一周。
2)时间分配:执行大地测量学课程设计大纲规定。
3)大地测量学课程设计的选题方向为:一、工程坐标系设计;二、不同类型的坐标系转换。
4)具体题目:54坐标系与80坐标系转换设计。
1.4设计概要1.4.1设计流程1)指导教师在设计开始前将设计任务书、设计指导书、基础设计素材交于学生,并讲解要点;学生应充分理解设计内容与要求,吃透设计素材。
2)学生独立自主进行课程设计,疑难问题与不解的问题及时与指导教师沟通解决。
3)学生按时完成设计并交设计说明书一份。
1.4.2.教学基本要求1)教师应事先准备课程设计任务书、指导书及设计所需的有关资料,安排好答疑时间。
2)为使学生形象深入地理解模型原理和设计方法,在课程设计过程中可安排适当时间剖析已有成果。
1.4.3.能力培养要求1)本课程设计主要培养学生对大地测量基准选择与设计及其转换方面的实践能力。
2)通过本课程设计实践,培养学生独立完成文献资料检索和理解相关条文规定内涵的能力,了解大地测量主要坐标系间的转换的方法,掌握坐标系建立的基本技能,知道与坐标系有关的计算或软件开发在大地测量数据处理中的重要性,并锻炼相关能力,培养学生综合运用设计原理分析问题,解决问题的能力。
2理论基础2.1四参数转换属于两维坐标转换,对于三维坐标,需将坐标通过高斯投影变换得到平面坐标再计算转换参数。
平面直角坐标转换模型:⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-++⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡110022cos sin sin cos )1(y x m y x y x αααα其中,x0,y0为平移参数,α为旋转参数,m 为尺度参数。
x2,y2为2000国家大地坐标系下的平面直角坐标,x1,y1为原坐标系下平面直角坐标。
坐标单位为米。
2.2坐标系统54与80转换(同四参数)常用量定义坐标系常用量及相关定义a 为椭球长半轴,1954年北京坐标系为6378245m1980西安坐标系为6378140mb 为椭球短半轴f 为椭球扁率, 1954年北京坐标系为1/298.31980西安坐标系为1/298.257a b f a -= 21e a b -=e ─第一偏心率 a b a e 22-= 222e f f =-e'─第二偏心率b b a e 22'-= B e 222cos '=ηtgB t =B e V 22cos '1+= 221η+=VB e W 22sin 1-=B 为纬度,单位弧度b ac 2=M ─子午圈曲率半径332)1(V c W e a M =-= N ─卯酉圈曲率半径V c W a ==N⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-++⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡110022cos sin sin cos )1(y x m y x y x αααα附综合法坐标转换所谓综合法即就是在相似变换(Bursa 七参数转换)的基础上,再对空间直角坐标残差进行多项式拟合,系统误差通过多项式系数得到消弱,使统一后的坐标系框架点坐标具有较好的一致性,从而提高坐标转换精度。