森瑟尔数字传感器通讯协议
《水资源监测数据传输规约》V1.1版20121009
总则 .............................................................................. 3 数据报文传输规约 .................................................................. 3 5.1 5.2 5.3 帧结构 ........................................................................ 3 链路传输 ..................................................................... 10 物理层规约 ................................................................... 12
3 3.1
术语、符号和代号 术语 GB/T 50095、SL 26等界定的以及下列术语和定义适用于本文件。
3.1.1 终端地址 terminal address 系统中终端设备的地址编码。亦称测站地址。 3.1.2 中继站地址 relay station address 系统中用于中转数据和监控命令的中继站的地址编码。 3.1.3 报文 report text 系统中交换与传输的完整数据信息。 3.1.4 启动站 initiative station 一次报文传输过程,主动发出报文的站。
国家水资源监控能力建设项目标准
SZY206-2012
水资源监测数据传输规约
Data transmission protocol for monitoring system
2012-09-10 发布
sension7台式电导率使用说明书
1.2 键盘介绍............................................................................................................ 13 1.3 屏幕区域和图标.................................................................................................. 15 1.4 声音信号............................................................................................................ 17
3
3.6.1 测量低水平电导率...................................................................................... 32 3.7 操作注意事项..................................................................................................... 33 3.8 常规转化因子..................................................................................................... 34 3.9 电导测量理论..................................................................................................... 34
知识分享-汽车网络技术

大众速腾动力总线系统
版权所有 © 浙江吉利汽车研究院有限公司
Copyright Reserved © Geely Automobile Research Institute
大众速腾舒适总线系统
版权所有 © 浙江吉利汽车研究院有限公司
Copyright Reserved © Geely Automobile Research Institute
版权所有 © 浙江吉利汽车研究院有限公司
Copyright Reserved © Geely Automobile Research Institute
6
大众速腾网络系统
版权所有 © 浙江吉利汽车研究院有限公司
Copyright Reserved © Geely Automobile Research Institute
汽车网络系统分类
SAE车辆通信与控制委员会将汽车数据传输 网划分为A、B、C、D四类。 A类是面向传感器/执行器控制的低速网络, 数据传输位速率通常小于10kb/s; B类是面向独立模块间数据共享的中速网络, 位速率一般在10kb/s到125kb/s之间; C类是面向高速、实时控制的多路传输网, 位速率在125kb/s到1Mb/s之间; D类主要用于信息与多媒体系统网络,通信 速率大于1Mb/s。
版权所有 © 浙江吉利汽车研究院有限公司
Copyright Reserved © Geely Automobile Research Institute
汽车电子网络技术
汽车电子网络技术是现代汽车电子技术的重要 组成部分,是现代汽车通信与控制的基础。 就像汽车电子技术在20世纪70年代引入集成 电路、80年代引入微控制器一样,近10多年来数 据总线技术的引入也将是汽车电子技术发展的一 个里程碑。
MR13温控表通讯协议(中文)

g: 数据⑾:
W指令后,插入数头符“,”代表改写一个参数
数头符 第一数据
“,” 1 2 3 4
例: 仅一个参数的写 W03000,****( 参数) e:响应代码⑹⑺:
正常响应码为”00”。 参看5-5响应码说明。
(4)基本格式2说明 h:结束符 表示文件的结束 以 ETX(03H) 或 “:”(3AH)表示 i:两位BCC(二进制块)码 说明: MR13[1-19B]窗口设置BCC块校验方式:
★ 用户可用Windows 环境下的WORDS的"PRINT"打印指令检查或打印MR13.doc 文件内容。
2.通讯口的技术数据
1. 信号电平: 2. 通讯方式:
3. 同步系统: 4. 通讯距离:
5. 通讯速度: 6. 传输保护: 7. 数据格式:
EIA标准 RS-232C,RS-485 RS-232C 3线半双工,单台 白RS-485 2线半双工,多台 起始位-停止位同步系统 RS-232C 15 米 RS-485 500 米 (具体视通讯条件而定) 1200,2400,4800,9600,19200 波特率 无保护 数据7位,1位偶校验位,1位停止位
3. 调节器通迅接线 3.1 RS-232C
上位机RS232C 9针连接器
数据发送 SD 3 数据接收 RD 2 信号地 GND 5
RD 3数据接收 SD 2数据发送 SG 7信号地
RS232接口,只能单台点对点的通迅,不能进行总线的并联。
3.3.485接口连线形式: 上位机RS232C 9针连接器
数据发送 SD 3 数据接收 RD 2 信号地 GND 5
希曼顿 RS232/RS485转换器
1 RXD 数据接收 数据发送/接收高 TR + 10
西门子 sitrans LR460 说明书

免责申明 虽然我们对手册内容是否与仪表描述一致进 行了核对,但仍可能存在变动。这样我们不 能确保完全一致。手册内容会被有序的核查 并纠正,勘误表登录在后续版本里。我们欢 迎用户提出各种改进建议。 技术数据可能有变动
MILLTRONICS®是 Siemens Milltronics Process Instruments Inc.的一个注册商标。 可通过下列地址联系 SMPI 技术出版部:
通过手操器快速启动精灵................................................................28 通过SIMATIC PDM快速启动精灵............................................................30 设备描述(DD)........................................................................30 快速启动步骤..........................................................................31 物位应用举例..............................................................................34 自动虚假回波抑制..........................................................................35
SITRANS LR460...........................................................................5
SEN - Sentry G3 Modbus通讯介绍_CN
6. ModScan32读数与G3显示对比
Contact Information
Condition Monitoring Solutions
Joe Chin
Managing Director
Sensonics (China) Limited
Room 603, 336 East Xietu Road, Shanghai 200011, China Tel: +86-21-53077189 Fax: +86-21-53071679 Mobile: +86-13916555847 zhenggang.qin@
推荐Modbus RS485 通讯形式 Sentry G3 + MGate
– 经济、灵活 – MGate轨道安装
Sentry G3 + MGate工作举例
测试软件:ModScan32 1. PC机IP地址设置
2. MGate设备搜索
3. MGate 操作模式选择
4. MGate 串口设置
5. ModScan32连接
G3 Modbus应用
HMI人机界面
– 用户应用级 – 外接Modem设备,转换成Modbus TCP/IP
系统集成商
– 上位机程序直接读取Modbus RTU – Honeywell , Triconex…
Sentry G3 Modbus
Modbus Slave接口(双Modbus)
MBUS+和MBUS-,两线制接线
Sentry G3 – Modbus通讯
2011年2月
英国胜索尼有限公司简介
英国胜索尼有限公司1972年成立于英国,有 近40年的设计、制造和安装机械设备和装置状态 监测和保护仪表的经验。
磁阻式角度传感器

Rotating shaftMR-sensor set-up磁阻角度传感器系统恩智浦的磁阻传感器技术是汽车测量系统领域中的上好之选。
不易磨损、长期稳定性以及直接测量的特性共同打造出一款精确、强劲的传感器。
从单芯片传感器、相应的信号调节ICs到整合的单封装解决方案,恩智浦出产的角度传感器物美价廉,可以满足您多方面的应用需求。
恩智浦生产的磁阻(MR)角度传感器具有许多技术方面的优势,它能够为汽车制造商提供更可靠、更准确的汽车测角解决方案,从而减少机械故障所引发的危险,改善车辆整体的安全性能。
随着汽车电子领域更多的采用先进的X-by-wire车内网络系统和控制系统,诸如:FlexRay,而这些控制系统无一例外的需要更加精确的测量数据,由此,这项技术的重要性也随之不断提高。
主要优势● 无触点测角,最大可达180°● 测量不受使用寿命和温度变化引起的磁漂移影响●热应力引起的机械公差以及磁体错位的影响不会对操作产生影响● 足够高的温度范围● 汽车行业资格认证● 高度灵活的解决方案,可以有效测量任何汽车角度●在漫长的生命周期中始终保持稳定运行主要应用领域● 电子节气门控制(ETC )● 可变气门控制(VVC )● 踏板与雨刮定位● 主动式减震系统● 自动前照灯光束调整● 电子转向系统●座椅定位MR传感器利用磁场来对重置价值和传感器进行测量。
这种无触点的原理实现了所有旋转组件的相互绝缘,从而使得整个传感系统在污染和机械损伤情况下长期保持强效运作。
此外,MR传感器只对磁场方向进行测量,并不计算磁场强度。
这样,即使在老化、机械损伤或磁体变温误差等引发场强变化的情况下,MR 传感器依然可以正常工作。
KMZ4x 与 UZZ900x 磁阻角度传感器KMZ41/KMZ43及UZZ900x恩智浦生产的KMZ41与KMZ43传感器桥接条包含8个MR电阻线圈,两个传感器以独立的惠斯通电桥形式在同一平面连接构成45度角。
森瑟836-2-LA铁路机车专用加速度传感器使用手册说明书
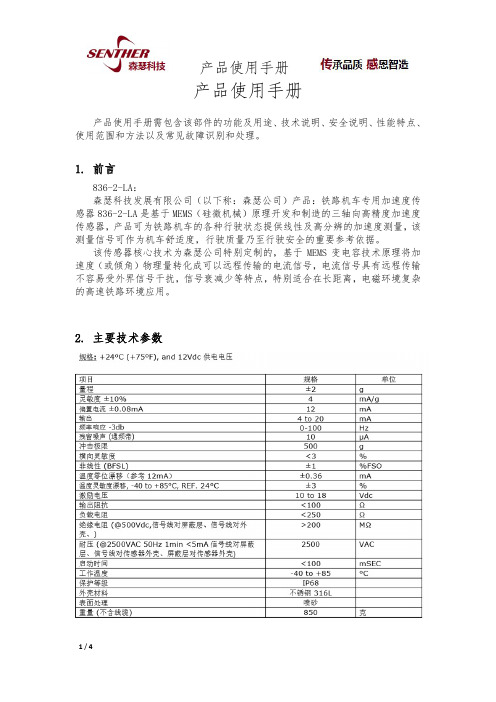
产品使用手册产品使用手册需包含该部件的功能及用途、技术说明、安全说明、性能特点、使用范围和方法以及常见故障识别和处理。
1.前言836-2-LA:森瑟科技发展有限公司(以下称:森瑟公司)产品:铁路机车专用加速度传感器836-2-LA是基于MEMS(硅微机械)原理开发和制造的三轴向高精度加速度传感器,产品可为铁路机车的各种行驶状态提供线性及高分辨的加速度测量,该测量信号可作为机车舒适度,行驶质量乃至行驶安全的重要参考依据。
该传感器核心技术为森瑟公司特别定制的,基于MEMS变电容技术原理将加速度(或倾角)物理量转化成可以远程传输的电流信号,电流信号具有远程传输不容易受外界信号干扰,信号衰减少等特点,特别适合在长距离,电磁环境复杂的高速铁路环境应用。
2.主要技术参数3.电气连接图4.产品结构图和尺寸5.安全注意事项该传感器为低压供电,供电对人体无伤害。
该传感器为矢量传感器-加速度具有方向性,使用上为需要注意安装的方向以及三个方向的相对性,并需要在采集端对三个信号加以区分。
该加速度传感器为森瑟公司定制部件,随货出厂有传感器的标定证书,包含零点,灵敏度,频率等测试参数。
标定证书遗失可以联系工厂凭序列号可以免费重新打印一次。
后续传感器参数重新标定可以按照1000RMB/轴的费用进行服务。
安装方面需要带扭力显示的内六角扳手,M10X18mm不锈钢安装螺栓。
选配安装零件有:绝缘垫圈,止动垫,绝缘板等。
用户日常检测可以使用直流电源,高精度万用表,高压测试台等实验室设备进行,不作为供货零件。
硅脂,黄油或者蜜蜡等安装填充剂为易耗物料,建议用户选其中一种长期配备,使用后建议使用工业酒精进行清理。
传感器如需要报废处理,建议退回厂家进行拆解并归类回收,避免直接遗弃。
传感器出厂时会有专业的抗冲击包装,在转运和存储当中应使用原包装进行保存。
在安装或者进料检验过程当中临时放置应用海绵保护传感器头部,应避免硬物直接碰撞或者跌落撞击。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
线路设备——传感器485传输协议V2.02.821 1.技术指标Ø输入电压(VDC):8~26Ø波特率(bps):9600Ø传感器接口类型:RS485Ø工作温度(℃):-40~85Ø其它技术参数按合同要求制作2.帧结构表1-1 帧结构定义帧头报文长度传感器类型通讯地址帧类型报文类型报文内容校验位2 Bytes 2 Bytes 1 Byte 1 Bytes 1 Byte 1 Byte 变长1Byte表1-1各参数定义如下:a)帧头:固定为0xBB71。
b)报文长度:指帧字节数(含帧头和校验位)。
c)通讯地址:RS485通讯地址,2个字节分配如下:第一个字节为传感器类型,定义如下:表1-2 传感器类型定义气象站双轴倾角传感器光纤盐密拉力传感器集成式拉力倾角温湿度气压传感器图像传感器0x01 0x02 0x03 0x04 0x05 0x06 0x10第二个字节为传感器地址字节,不同传感器系列可以具有相同的传感器地址字节。
d)帧类型:按功能对数据帧进行区分、标识,具体定义见下表。
表1-3 帧类型定义序号帧类型值含义1 0xAE(<<) 上传报文(设备←传感器)2 0xAF(>>) 下发报文(设备→传感器)e)报文类型:表1-4 报文类型定义序号 报文类型值 含义 备注1 0x01 设置地址2 0x02 查询地址 仅限于总线上只有一个同类型的传感器时使用3 0x03 设置工作方式4 0x04 查询工作方式5 0x05 读取即时数据6 0x06 读取平均数据 本规范版本仅对气象站有效注:对拉力、倾角、风速等传感器而言,存在零值标定和斜率校准等控制指令,这些指令只允许在出厂调试时使用,不允许设备运行过程中发送,因此在本文件中不进行规范。
f)报文内容:数据长度不定,具体定义参考第3节。
g)校验位:累加和校验,包括报文中除校验位外的所有报文数据,取末尾字节。
3.帧数据排列格式整形(占2bytes)、长整形(占4bytes),均采用高字节在前、低字节在后的方式存储。
除特殊说明,各传感器上传的采样数据均采用浮点数(占4bytes),采用高字节在前、低字节在后的方式存储。
4.数据报文格式4.1.1.设置传感器地址命令:0x01传感器地址设置报文格式见下表:表3-1 传感器地址设置报文格式序号报文名称长度(Byte)定义1 帧头2 帧头:0xbb712 报文长度 2 0x000a3 通讯地址传感器类型 1 参见表1-24 传感器地址 15 帧类型 1 0xAF(参见表1-3)6 报文类型 1 0x01(参见表1-4)7 报文内容 1 传感器新地址(1字节)8 校验位 1 累加和响应方式的数据报文格式见下表:表3-2 响应方式的数据报文格式序号报文名称长度(Byte)定义1 帧头2 帧头:0xbb712 报文长度 2 0x000A3 通讯地址传感器类型 1 参见表1-24 传感器地址 15 帧类型 1 0xAE(参见表1-3)6 报文类型 1 0x01(参见表1-4)7 报文内容 1 数据发送状态:①0xFF地址设置成功②0x00地址设置失败8 校验位 1 累加和示例:将拉力传感器的地址由0x01设置为0x05命令(16进制):BB 71 00 0A 04 01 AF 01 05 F0响应(16进制):成功设置:BB 71 00 0A 04 05 AE 01 FF ED (传感器地址为新地址)失败设置:BB 71 00 0A 04 01 AE 01 00 EA (传感器地址为原地址)4.1.2.查询传感器地址命令:0x02此命令用于不知道传感器地址的前提下进行,以广播地址方式发送。
在这种情况下,仅允许总线上挂接一只同类型传感器,以防数据出错。
查询传感器地址报文格式见下表:表3-3 查询传感器地址报文格式序号报文名称长度(Byte)定义1 帧头2 帧头:0xbb712 报文长度 2 0x00093 通讯地址传感器类型 1 参见表1-24 传感器地址 1 广播地址:0xFF5 帧类型 1 0xAF(参见表1-3)6 报文类型 1 0x02(参见表1-4)7 报文内容0 空8 校验位 1 累加和响应方式的数据报文格式见下表:表3-4 响应方式的数据报文格式序号报文名称长度(Byte)定义1 帧头2 帧头:0xbb712 报文长度 2 0x000A3 通讯传感器类型 1 参见表1-24 地址传感器地址 1 广播地址:0xFF5 帧类型 1 0xAE(参见表1-3)6 报文类型 1 0x02(参见表1-4)7 报文内容 1 传感器的实际地址8 校验位 1 累加和4.1.3.读取即时数据命令: 0x05读取即时数据报文格式见下表:表3-9 读取即时数据报文格式序号报文名称长度(Bytes)定义1 帧头2 帧头:0xbb712 报文长度 2 0x00093 通讯地址传感器类型 1 参见表1-24 传感器地址 15 帧类型 1 0xAF(参见表1-3)6 报文类型 1 0x05(参见表1-4)7 报文内容0 空8 校验位 1 累加和传感器接收到要求上传即时数据的报文后,立即进行测量,并将测试数据作为响应报文上传,响应的数据报文格式见下表:表3-10 读取即时数据的响应报文格式序号报文名称长度(Byte)含义1 帧头2 帧头:0xbb712 报文长度 2 因传感器而异3 通讯地址传感器类型 1 参见表1-24 传感器地址 15 帧类型 1 0xAE(参见表1-3)6 报文类型 1 0x05(参见表1-4)7 报文内容不定因传感器而异,详见4.1.5.18 校验位 1 累加和补充,以下为工厂用命令。
●设置传感器工作方式命令:0x03主机命令发送格式:序号报文名称长度(Bytes)定义1 帧头2 帧头:0xbb712 报文长度 2 0x000a3 通讯地址传感器类型 1 参见表1-24 传感器地址 15 帧类型 1 0xAF(参见表1-3)6 报文类型 1 0x03(参见表1-4)7 传感器工作方式 1 传感器工作方式:①0x00-应答方式②0x01主动上传方式8 校验位 1 累加和传感器返回格式:序号报文名称长度(Byte)含义1 帧头2 帧头:0xbb712 报文长度 2 0x000a3 通讯地址传感器类型 1 参见表1-24 传感器地址 15 帧类型 1 0xAE(参见表1-3)6 报文类型 1 0x03(参见表1-4)7 数据发送状态 1 数据发送状态:0xFF①成功0x00②失败8 校验位 1 累加和●查询传感器工作方式命令:0x04主机命令发送格式:序号报文名称长度(Bytes)定义1 帧头2 帧头:0xbb712 报文长度 2 0x00093 通讯地址传感器类型 1 参见表1-24 传感器地址 15 帧类型 1 0xAF(参见表1-3)6 报文类型 1 0x04(参见表1-4)7 校验位 1 累加和传感器返回格式:序号报文名称长度(Byte)含义1 帧头2 帧头:0xbb712 报文长度 2 0x000a3 通讯地址传感器类型 1 参见表1-24 传感器地址 15 帧类型 1 0xAE(参见表1-3)6 报文类型 1 0x04(参见表1-4)7 传感器工作方式 1 默认为0,即应答方式8 校验位 1 累加和●传感器零点校正命令: 0x0d主机命令发送格式:序号报文名称长度(Bytes)定义1 帧头2 帧头:0xbb712 报文长度 2 0x00093 通讯地址传感器类型 1 参见表1-24 传感器地址 15 帧类型 1 0xAF(参见表1-3)6 报文类型 1 0x0d(参见表1-4)7 校验位 1 累加和传感器返回格式:序号报文名称长度(Byte)含义1 帧头2 帧头:0xbb712 报文长度 2 0x000a3 通讯地址传感器类型 1 参见表1-24 传感器地址 15 帧类型 1 0xAE(参见表1-3)6 报文类型 1 0x0d(参见表1-4)7 数据发送状态 1 数据发送状态:0xFF①成功0x00②失败8 校验位 1 累加和4.1.5.1 拉力传感器上传数据中报文内容项的格式序号报文内容长度(Byte)含义7.1 拉力值 4 浮点数格式4.1.5.2 集成式拉力传感器上传数据中报文内容项的格式序号报文内容长度(Byte)含义7.1 拉力值 4 浮点数格式7.2 X轴倾角 4 浮点数格式7.3 Y轴倾角 4 浮点数格式5.485接口定义所有传感器的接口均采用5芯连接器(型号自定),连接电缆均采用屏蔽型。
连接器的端子定义如下表:序号 名称 描述 备注1 + A 485+ 外部接线2 - B 485- 外部接线3 GND 外部供电地 外部接线4 12V 外部供电正 外部接线5 BF 备用 外部接线特别说明:1、除上述指令外,在传感器生产过程中的其它参数配置、设置指令厂家可自定义(如零点校正指令等)。
2、传感器的工作方式默认为应答方式。
3、传感器加电后,空闲时间自动采集数据,并不断求取平均值。
当指令下发时,首先响应指令。
传感器在收到数据采集指令时,应上传最新的平均值,在下次数据采集周期内重新计算平均值(传感器每收到一次数据采集指令为一个数据采集周期)。