振动压路机振动轮设计说明书
BOMAG 博马双钢轮振动压路机 BW100SL-5 和 BW120SL-5 说明书

TANDEM VIBRATORY ROLLERBW100SL-5 and BW120SL-5/usStandard EquipmentFoldable ROPS with seat beltHydrostatic travel and vibration drive P ressure sprinkler system with interval switch S uspended operator´s platform2 scrapers per drum, spring loaded and tiltable M ulti-function travel leverM ulti-function display incl. operating hour meterW ater levelF uel levelE lectric fuel gaugeE mergency STOPIndividual control, vibrationIntelligent Vibration Control (IVC)I ntegrated stowage compartmentA djustable operator´s seatL ashing eyes, galvanizedB ack-up alarmS ingle point lifting deviceV -belt protectionV andalism protectionL ockable engine hood made of composite materialW orking lights front and rear12V socketS eat contact switchP lastic water tankB olt-on oscillating/articulating jointOptional EquipmentI ndicator and hazard lightsRotary beaconBattery disconnection switchSliding seatECONOMIZERBurglary protectionSpecial paint Technical data BOMAG BOMAG BW 100 SL-5 BW 120 SL-5Weights Operating weight w. ROPS ...............lb (kg) 5181 (2350) 5511 (2500)Average static linear load ............lb/in (kg/cm) 66.1 (11.8) 58.2 (10.4)Driving Characteristics Speed ............................mph (km/h) 0 – 5.6 (0 – 9) 0 – 5.6 (0 – 9)Working speed with vibration .........mph (km/h) 0 – 3.1 (0 – 5) 0 – 3.1 (0 – 5)Max. gradeability without/with vibr. ............% 40 / 30 40 / 30Drive Engine manufacturer .......................... Kubota Kubota Type. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . D 1703-DI D 1703-DI Tier Compliance ............................. Tier 4 Final Tier 4 Final Cooling .................................... water water Number of cylinders .......................... 3 3Performance ISO 14396....................kW 18.5 18.5Performance SAE J 1995 .....................hp 24.8 24.8Speed ..................................rpm 2200 2200Electric equipment ..........................V 12 12Driven drum ................................ front + rear front + rear Brakes Service brake ................................ hydrost. hydrost.Parking brake ................................ hydromec. hydromec.Steering .................................... Steering system ............................... oscil.artic. oscil.artic.Steering method .............................. hydrost. hydrost.Steering / oscillating angle +/- ................deg 32 / 10 32 / 10Crab steer offset – manual ...............in (mm) 0 – 2 (0 – 50) 0 – 2 (0 – 50)Track radius, inner .....................in (mm) 96.5 (2450) 96.5 (2450)Exciter System Vibrating drum .............................. front + rear front + rear Drive system ................................ hydrost. hydrost.Frequency .........................VPM (Hz) 4320 (72) 4320 (72)Amplitude ...........................in (mm) 0.020 (0.50) 0.020 (0.50)Centrifugal force .......................lb (kN) 7640 (34) 8993 (40)Drum Water Spray System Type. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pressure with interval pressure with interval Capacities Fuel ..................................gal (l) 9.2 (35) 9.2 (35)Water .................................gal (l) 43.6 (165) 43.6 (165)Technical modifications reserved. Machines may be shown with options.Technical DataBW 100 SL-5, BW 120 SL-5A B C D H H2K L O S W BW 100 SL-5694220.627.671.21011099.6 1.40.439.4(1752)(1072)(523)(700)(1808)(2568)(254)(2529)(36)(10)(1000)BW 120 SL-5695020.627.671.21011099.6 1.40.447.2(1752)(1272)(523)(700)(1808)(2568)(254)(2529)(36)(10)(1200)Dimensions in inches (mm)Shipping dimensions in ft 3 (m 3)BW 100 SL-5 247 (7)BW 120 SL-5 293 (8.3)。
振动式压路机CC224HF 324HF 384HF和CC2200 3200 3800说明手册说明书

;XS263J振动压路机技术规格书(2015.1)
XS263J振动压路机技术规格书徐工集团工程机械股份有限公司道路机械分公司二Ο一五年一XS263J型振动压路机技术规格书1 概述XS263J振动压路机是由徐工集团工程机械股份有限公司自主研发的一款高效节能超重型机械驱动单钢轮振动压路机。
该产品总体参数匹配合理,运用低转速发动机、液压阻尼控制技术,节能降噪效果明显;运用“三心合一”技术,优化传动系统,使压实性能和效率得到有效提升;采用自主研发的新型电控操纵系统,提升了操作舒适性;研发的离合自动缓冲技术,使传动系统的可靠性显著提高。
XS263J振动压路机主要适用于对地面的压实,适宜于卵石、砂性土壤、冰碛土、爆破岩石和粘性土壤的压实作业,也适宜于各种大型工程中对混凝土、稳定土的基础材料的压实,是建设高等级公路、机场、港口、堤坝及工业建筑工地的理想压实设备。
2 产品执行的法律、法规、安全标准和产品标准法律法规按Q/XCMG01404-2006《公司产品相关的法律法规目录》的规定执行。
标准化综合要求执行Q/XDL10020-2013《压路机执行标准规范》中有关振动压路机部分的要求。
整机性能满足GB/T8511-2005《振动压路机技术条件》和GB/T13328-2005《压路机通用要求》中的相关规定和要求;安全性能满足GB25684.1-2010《土方机械安全通用要求》和GB 25684.13-2010 《土方机械安全压路机的要求》两项国家强制性标准。
3 主要技术性能与特点(1)采用上柴SC8D直喷式涡轮增压低转速柴油机,实现最佳油耗工作区,使综合油耗下降10%;低转速柴油机降低噪声排放,并增强整机密封性,使整机噪声下降2分贝;优化传动系统匹配,实现最佳的压实作业速度,使作业效率提升8%;(2)离合结合的速度由原来的人工控制改进为系统智能控制,解决了人为因素对系统的影响,使离合系统的可靠性大幅提升;(3)驾驶室与机架采用组合刚度的减振装置,多维度降低驾驶室的振动,显著提升操作者的工作舒适性;(4)采用科学合理风道设计,空调系统独立散热以保证足够的进风量,综合提升散热能力,保证动力系统高效工作;(5)电液控制的动力换挡变速箱,配以自主知识产权的新型电控换挡手柄,显著增加操纵舒适性;(6)运用先进的液压阻尼控制技术,优化振动参数,工作更加平稳,作业质量大幅提升;(7)前翻机罩开启角度大,电动升降装置可使机罩在升降过程中安全地停在任何位置,各系统部件维护方便;(8)整体采用徐工单钢轮压路机“3”系列平台新外观造型,整机呈流线型造型。
;XS263J振动压路机技术规格书(2015.1)
XS263J振动压路机技术规格书徐工集团工程机械股份有限公司道路机械分公司二Ο一五年一XS263J型振动压路机技术规格书1 概述XS263J振动压路机是由徐工集团工程机械股份有限公司自主研发的一款高效节能超重型机械驱动单钢轮振动压路机。
该产品总体参数匹配合理,运用低转速发动机、液压阻尼控制技术,节能降噪效果明显;运用“三心合一”技术,优化传动系统,使压实性能和效率得到有效提升;采用自主研发的新型电控操纵系统,提升了操作舒适性;研发的离合自动缓冲技术,使传动系统的可靠性显著提高。
XS263J振动压路机主要适用于对地面的压实,适宜于卵石、砂性土壤、冰碛土、爆破岩石和粘性土壤的压实作业,也适宜于各种大型工程中对混凝土、稳定土的基础材料的压实,是建设高等级公路、机场、港口、堤坝及工业建筑工地的理想压实设备。
2 产品执行的法律、法规、安全标准和产品标准法律法规按Q/XCMG01404-2006《公司产品相关的法律法规目录》的规定执行。
标准化综合要求执行Q/XDL10020-2013《压路机执行标准规范》中有关振动压路机部分的要求。
整机性能满足GB/T8511-2005《振动压路机技术条件》和GB/T13328-2005《压路机通用要求》中的相关规定和要求;安全性能满足GB25684.1-2010《土方机械安全通用要求》和GB 25684.13-2010 《土方机械安全压路机的要求》两项国家强制性标准。
3 主要技术性能与特点(1)采用上柴SC8D直喷式涡轮增压低转速柴油机,实现最佳油耗工作区,使综合油耗下降10%;低转速柴油机降低噪声排放,并增强整机密封性,使整机噪声下降2分贝;优化传动系统匹配,实现最佳的压实作业速度,使作业效率提升8%;(2)离合结合的速度由原来的人工控制改进为系统智能控制,解决了人为因素对系统的影响,使离合系统的可靠性大幅提升;(3)驾驶室与机架采用组合刚度的减振装置,多维度降低驾驶室的振动,显著提升操作者的工作舒适性;(4)采用科学合理风道设计,空调系统独立散热以保证足够的进风量,综合提升散热能力,保证动力系统高效工作;(5)电液控制的动力换挡变速箱,配以自主知识产权的新型电控换挡手柄,显著增加操纵舒适性;(6)运用先进的液压阻尼控制技术,优化振动参数,工作更加平稳,作业质量大幅提升;(7)前翻机罩开启角度大,电动升降装置可使机罩在升降过程中安全地停在任何位置,各系统部件维护方便;(8)整体采用徐工单钢轮压路机“3”系列平台新外观造型,整机呈流线型造型。
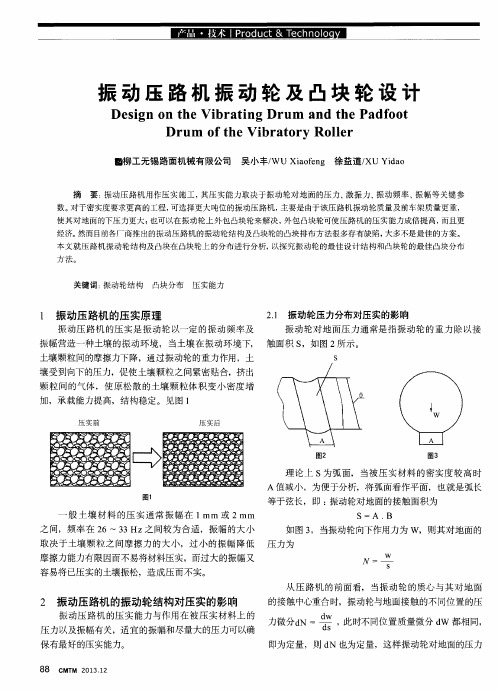
振动压路机振动轮及凸块轮设计
压实 前 压 实后
2 . 1 振动轮压力分布对压实的影响
振 动轮 对地 面压 力 通常是 指振 动轮 的重力 除 以接
S
振幅营 造一种土壤 的振 动环境 ,当土壤 在 振动 环境 下, 触 面积 s ,如 图 2 所示。
图2
图4 b 。
3 凸块 轮 的结构对压实效果 的影 响
以上分 析 了影 响振动压 路机压 实 的两个 因素,即 :
出现两者 不均 匀分 布都 将 造 成压 实度 的不 均匀 ,使 得 同样压 实遍数 的压实面上 不同位 置 的密实度不尽相 同。
由此 , 当振动轮质心 与其 对地面 的接触 中心重合时, 否则会产生不均匀 的压 实工况。
8 8 C M T M 2 0 1 3 . 1 2
此时不同位 置 质量微分 d w 都相 同,
即为定量 ,则 d N也为定量 ,这 样振动 轮对地面 的压力
分布呈均匀分布。 图 4 a 。
因此 ,振动轮 的设 计应确保 两个重合,即 : 振动 轮
当振动 轮 的质 心与 其对 地面 的接 触 中心不 重合 时, 质心与振动 轮对地 面的接触 中心重合,激 振 中心与振动 则振 动 轮与地 面接 触 的不 同位 置 的压 力微 分 d W 随面 轮对地 面的接触 中心重合。 积 微 分 的位 置 呈 线 性变 化 ,其 压 力呈 不均 匀分 布,如
经济。 然而目前各厂商推 出的振动压 路机 的振动轮结 构及 凸块轮的凸块排 布方法很多存有缺陷, 大 多不是最佳 的方 案。
本文就压 路机 振动轮结构及凸块在凸块轮上的分布进行分析, 以探 究振动轮的最佳设计 结构和 凸块轮的最佳 凸块分布
建筑工程行业振动压路机使用说明书

建筑工程行业振动压路机使用说明书使用说明书一、概述建筑工程行业振动压路机是一种用于压实土壤、砾石、沥青等材料的专用设备,其主要功能是通过振动和压实作用使地基或道路达到一定的密实度和平整度。
本使用说明书将会详细介绍振动压路机的组成部分、使用方法、注意事项等内容,以确保用户正确、安全地使用振动压路机。
二、组成部分振动压路机主要由以下组成部分构成:1. 机架:支撑整个设备,具有良好的结构强度和稳定性;2. 发动机:提供动力,驱动振动机构和行走装置;3. 振动机构:通过将振动力传递至滚筒,实现土壤或石料的振动压实;4. 行走装置:使设备能够在工作地点自由移动;5. 操纵系统:控制设备的各项功能和参数,包括启动、关机、加油等;6. 其他辅助部件:包括滚筒、水箱、制动器、照明设备等。
三、使用方法1. 准备工作:(1)检查设备各部位的紧固件,确保其牢固可靠;(2)检查振动机构和滚筒是否正常运转,如有异常应及时处理;(3)检查发动机油液、水箱水位等,确保充足。
2. 启动设备:(1)将振动压路机放置在平坦且稳定的地面上;(2)关闭所有操作杆、油门和振动开关;(3)启动发动机,确保其正常运转;(4)检查滚筒是否开始旋转,确认振动功能是否正常。
3. 操作技巧:(1)选择适当的振动模式,根据不同的地面材料进行调整;(2)保持设备的稳定性,避免急转弯或迅速改变行进方向;(3)振动过程中,控制好前进速度,尽量避免地面反弹造成的震动;(4)根据实际情况调整振动压实时间和力度,以确保达到理想的压实效果。
四、注意事项1. 安全操作:(1)在操作前,务必熟悉本说明书中的内容,并按照要求进行操作;(2)佩戴合适的个人防护装备,如安全帽、耳塞、安全鞋等;(3)在施工现场保持适当的安全距离,避免行人或其他车辆接近。
2. 维护保养:(1)定期检查设备各部位的磨损程度,如有异常应及时更换或修理;(2)定期更换润滑油、发动机机油、滤芯等,保证设备的正常运转;(3)设备存放时,应放置在干燥通风的地方,避免长期暴露在阳光下。
YZC3振动压路机振动轮毕业设计

2、采用AutoCAD等绘图软件绘制所需图纸,并用word编辑所写论文内容。
四、主要参考文献与资料获得情况
周萼秋,易小刚,汤汉辉.现代压实机械.北京:人民交通出版社,2003.
秦四成.振动压路机.北京:化学工业出版社,2006.
李冰,焦生杰.振动压路机与振动压实技术.北京:人民交通出版社,2001.8.
振动轮是从动轮也是压实轮,其采用的是一种不平衡偏心块式结构。当振动
压路机在作业时,振动轮带动偏心块高速旋转,偏心块产生的离心力就成为干扰力。振动轮将此干扰力传递到土壤,使路基产生振动,从而增强路基的压实度。
二、国内外研究综述
建国以前,我国只有一些压路机的修配工厂,直到1940年,大连仿制出了我国第一台蒸汽压路机。建国以后,上海市工程局厦门筑路机械厂(洛阳建筑机械厂前身)于1952年成功地制造了6t三轮压路机,1954年厦门筑路机械厂由上海迁往洛阳,改名为洛阳建筑机械厂,并于1957年试制成功了12/15t三轮压路机,洛阳建筑机械厂成为我国第一个生产压路机的专业厂。
本科毕业设计(论文)开题报告
题目名称
YZC3振动压路机振动轮设计
学生姓名
专业班级
学号
一、选题的目的和意义
压路机,压路机是一种工程机械。利用碾轮的碾压作用使土壤、路基垫层和路面铺砌层密实的自行式压实机械。适用于高等级公路、铁路、机场跑道、大坝等大型工程项目的填方压实作业,具有良好的高原(海拔3500m)作业性能;可以碾压沙性、半粘性及粘性土壤,激振力大,影响深度达1米以上。
尹继瑶.压路机设计与应用.机械工业出版社,2000,05:259~282.
陈宏彬,刘军.国外振动压路机发展趋势.中外公路.2005,25(1):35~37.
振动压路机振动轮设计说明书
目录第1章绪论..................................... - 1 -1.1 国内外压路机产品技术概述与发展趋势.................................................................................. - 1 -1.2本设计研究内容........................................................................................................................... - 2 - 第2章总体方案设计............................... - 3 -2.1. 整机方案拟定............................................................................................................................. - 3 -2.1.1 规格系列........................................................................................................................... - 3 -2.1.2行驶方式......................................................................................................................... - 3 -2.1.3行走驱动系统................................................................................................................. - 3 -2.1.4 车架形式........................................................................................................................... - 4 -2.1.5 转向方式........................................................................................................................... - 4 -2.1.6 振动轮总成....................................................................................................................... - 4 -2.1.7 减振方式........................................................................................................................... - 5 -2.2基本技术参数的拟定................................................................................................................ - 6 -2.2.1 名义振幅........................................................................................................................... - 6 -2.2.2. 工作频率.......................................................................................................................... - 6 -2.2.3 YZC3振动压路机拟达到的主要技术参数..................................................................... - 7 - 第3章整体参数计算.............................. - 8 -3.1 六个基本参数计算...................................................................................................................... - 8 -3.2爬坡能力的确定........................................................................................................................... - 9 -3.3 转弯半径计算.............................................................................................................................. - 9 -3.4 重心位置 ..................................................................................................................................... - 9 -3.5 整机稳定性分析.......................................................................................................................... - 9 -3.6减振系统设计与计算................................................................................................................. - 18 -3.7 振动参数的设计计算................................................................................................................ - 19 - 第4章YZC3型振动压路机传动系统设计............. - 21 -4.1 传动形式的确定........................................................................................................................ - 21 -4.2 液压行走系统设计.................................................................................................................... - 22 -4.3 液压振动系统设计.................................................................................................................... - 26 -4.4 液压转向系统设计.................................................................................................................... - 29 -4.5整机功率及发动机选型............................................................................................................ - 32 - 第5章总结.................................... - 33 -5.1本设计的特点.......................................................................................................................... - 33 -5.2本设计的不足及努力方向...................................................................................................... - 33 - 参考文献......................................... - 35 -第1章绪论1.1 国内外压路机产品技术概述与发展趋势20世纪30年代,世界上最早的振动压路机出现在的德国。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录第1章绪论..................................... - 1 -1.1 国内外压路机产品技术概述与发展趋势.................................................................................. - 1 -1.2本设计研究内容........................................................................................................................... - 2 - 第2章总体方案设计............................... - 3 -2.1. 整机方案拟定............................................................................................................................. - 3 -2.1.1 规格系列........................................................................................................................... - 3 -2.1.2行驶方式......................................................................................................................... - 3 -2.1.3行走驱动系统................................................................................................................. - 3 -2.1.4 车架形式........................................................................................................................... - 4 -2.1.5 转向方式........................................................................................................................... - 4 -2.1.6 振动轮总成....................................................................................................................... - 4 -2.1.7 减振方式........................................................................................................................... - 5 -2.2基本技术参数的拟定................................................................................................................ - 6 -2.2.1 名义振幅........................................................................................................................... - 6 -2.2.2. 工作频率.......................................................................................................................... - 6 -2.2.3 YZC3振动压路机拟达到的主要技术参数..................................................................... - 7 - 第3章整体参数计算.............................. - 8 -3.1 六个基本参数计算...................................................................................................................... - 8 -3.2爬坡能力的确定........................................................................................................................... - 9 -3.3 转弯半径计算.............................................................................................................................. - 9 -3.4 重心位置 ..................................................................................................................................... - 9 -3.5 整机稳定性分析.......................................................................................................................... - 9 -3.6减振系统设计与计算................................................................................................................. - 18 -3.7 振动参数的设计计算................................................................................................................ - 19 - 第4章YZC3型振动压路机传动系统设计............. - 21 -4.1 传动形式的确定........................................................................................................................ - 21 -4.2 液压行走系统设计.................................................................................................................... - 22 -4.3 液压振动系统设计.................................................................................................................... - 26 -4.4 液压转向系统设计.................................................................................................................... - 29 -4.5整机功率及发动机选型............................................................................................................ - 32 - 第5章总结.................................... - 33 -5.1本设计的特点.......................................................................................................................... - 33 -5.2本设计的不足及努力方向...................................................................................................... - 33 - 参考文献......................................... - 35 -第1章绪论1.1 国内外压路机产品技术概述与发展趋势20世纪30年代,世界上最早的振动压路机出现在的德国。
此后随着振动压实理论研究的深入,避振材料和振动轴承制造技术的不断完善,振动压路机在60年代占领了世界压实机械市场,其品种、规格也呈现多元化发展。
随着社会需求对压路机动力性能、运动精度及自动化程度的要求,液压传动技术于60年代应用于压路机,70年代国外的大多数振动压路机已经实现液压传动。
随后,电液控制技术在振动压路机上的应用,更使得压路机实现了行走、振动、转向和制动等系统的全液压传动。
到20世纪末期,电子技术和计算机技术给压实机械进行了一场控制革命,德国宝马(Bomag)公司首创了振动调幅压实系统并迅速推向世界市场。
目前,国际上全液压传动压路机技术中,液压传动、全轮驱动、铰接转向等技术已经较为成熟,自动控制技术还处于起步阶段,其中振动参数的自动控制已经有了突破性进展,但技术还有待进一步完善[1] [2]。