激光多普勒测速系统
激光多普勒测速
(1)波源和观察者相对于介质是静止的(u=0,v=0), 观察者接收到的频率即为波源原有的频率,即f= f0
(2)波源不动,观察者以速度v相对于介质运动
(u=0,v 0),观察者接收到的频率为 观察者背离波源取负号。
f
V v
(1
v V
)
f
0
(3)观察者不动,波源以速度u相对于介质运动(
这种在迭加区域出现的光强稳定的强弱分布的现象称为光的 干涉。在观察时间内,P点平均光强为:
I 1
Id
0
E021
E022
2 E01 E02
1
cosd
0
பைடு நூலகம்
如果在观察时间内,各个时刻到达的两束光波迅速而无规
则地变化,多次经理0~2之间的一切值,则,
1
0
cosd
intensity points
DL
F
1
0 1/e 2 z
x
y
X
Transmitting System
Z
Y X Intensity
Distribution
Z Measurement Volume Y
Measurement Volume
Length:
4F
z
E
DL
sin
2
5-9 激光多普勒流速仪测速
1.概述-激光特性与应用
激光是完全新颖的光源,它以高亮度(比 太阳光亮1010倍)、高纯度(单色性,比 氪灯纯上万倍)、高方向性(既相干性) 而著称。因为普通光源向4立体角发散, 而激光的发散角只有10-6rad,因而单位立 体角单位面积的输出功率就特别大。
激光多普勒测速仪工作原理

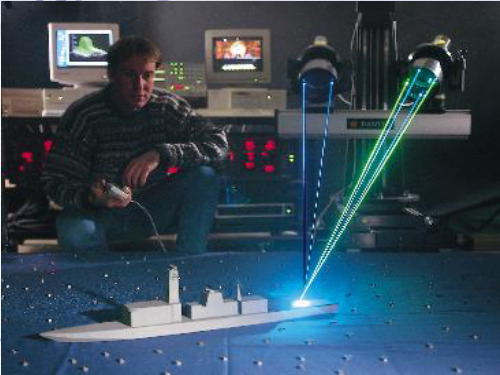
激光多普勒测速仪工作原理激光多普勒测速仪,听上去就像科幻电影里的高科技玩意儿,其实它的原理并没有那么复杂。
想象一下,你在路边看着一辆车飞驰而过,车子发出的声音变高了,然后又变低了,这就是多普勒效应的魔力。
激光多普勒测速仪就像是把这个声音的变化变成了光的变化。
我们来聊聊它是怎么工作的。
这个仪器会发出一束激光,这束激光就像是你的好朋友,跟着你走来走去。
然后,当这束激光照到移动物体,比如说一辆车或者一块正在转动的机械零件时,激光会被反射回来。
可有趣的是,这个反射回来的光波频率会发生变化,快的东西反射回来的光频率变高,慢的则相对低一些。
就好像当你向某个人打招呼时,他们走得快,你的声音听起来就会高亢激昂,走得慢时,你的声音又会变得悠扬而柔和。
仪器的探测器就像是个侦探,专门负责捕捉这些反射回来的光波。
探测器会把这些光波的频率变化进行分析,最终算出物体的速度。
你看,就像数学题一样,难度不高吧?而且这个过程是相当迅速的,几乎可以实时监测到物体的运动状态。
大家都知道,速度是非常重要的,无论是在交通管理上,还是在工业生产中。
激光多普勒测速仪的应用广泛得不得了。
比如说,汽车制造商在检测新车的性能时,会用这个仪器来确认车速是否达标。
再比如,机场里的雷达监控也可以借助激光多普勒测速仪来监控飞行器的速度,保证一切安全无误。
说到这里,很多人可能会想,“这玩意儿是不是得很贵?”其实现在的科技越来越普及,价格也逐渐亲民了,很多企业都能负担得起。
而且激光多普勒测速仪还有个特别之处,就是它可以在不接触物体的情况下进行测量,简单来说,就是“隔空取物”。
这就像你在家里用遥控器调电视,既方便又不费劲。
想想看,如果在高温或者危险的环境下工作,能够用激光来测量速度,那是多么安全啊。
再说说它的精准度,激光多普勒测速仪的测量结果非常准确,通常能够达到千分之一米每秒的精度。
这对于一些需要高精度的工业流程,简直就是福音。
比如说,做一些精密加工的机械,稍微的误差都可能导致整个产品的失败,所以激光多普勒测速仪的出现,无疑提升了生产效率和质量。
激光多普勒测速仪介绍(LDV)讲解

激光多普勒测速仪
1 激光多普勒测速仪概念
激光多普勒测速仪(LDV: Laser Doppler Velocimetry,是应用多普勒效应,利用激光的高相干性和高能量测量流体或固体流速的一种
仪器,它具有线性特性与非接触测量的优点,并且精度高、动态响应快。
由于它大多数用在流动测量方面,国外习惯称它为激光多普勒风
速仪(Laser Doppler Anemometer,LDA,或激光测速仪或激光流速仪(Laser Velocimetry,LV的。
示踪粒子是利用运动微粒散射光的多普勒频移来获的速度信息的。
因此它实际上测的是微粒的运动速
度,同流体的速度并不完全一样。
幸运的是,大多数的自然微粒(空
气中的尘埃,自来水中的悬浮粒子)在流体中一般都能较好地跟随流动。
如果需要人工播种,微米量级的粒子可以同时兼顾到流动跟随性
和LDV测量的要求。
激光多普勒测速
激光多普勒测速1.引言激光多普勒测速技术是伴随着激光器的诞生而产生的一种新的测量技术,它是利用激光的多普勒效应来对流体或固体速度进行测量的一种技术,广泛应用于军事,航空,航天,机械,能源,冶金,水利,钢铁,计量,医学,环保等领域[1-2]。
激光多普勒测速仪是利用激光多普勒效应来测量流体或固体运动速度的一种仪器,通常由五个部分组成:激光器,入射光学单元,接收或收集光学单元,多普勒信号处理器和数据处理系统或数据处理器,主要优点在于非接触测量,线性特性,较高的空间分辨率和快速动态响应,采用近代光-电子学和微处理机技术的LDV系统,可以比较容易地实现二维,三维等流动的测量,并获得各种复杂流动结构的定量信息。
由于上述潜在的独特功能,激光多普勒技术吸引了大量的实验流体力学和其他学科的研究工作者去研究和解决这些问题,使激光测速技术得到飞速发展,成为流动测量实验的有力工具。
激光测速技术的发展大体上可分为三个阶段[1-3]。
第一个阶段是1964 – 1972 年,这是激光测速发展的初期。
在此期间,大多数的光学装置都比较简单,用各种元件拼搭而成,光学性能和效率不高,使用调准也不方便;第二个阶段是1973 – 1980 年,在此期间,激光测速在光学系统和信号处理器方面有了很大的发展。
光束扩展,空间滤波,偏振分离,频率分离,光学频移等近代光学技术相继应用到激光测速仪中。
从1980年到现在,激光测速进入了第三个阶段。
在此期间,应用研究得到快速发展。
在发表的论文中,有关流动研究的论文急剧增加。
多维系统,光纤传输技术以及数字信号处理和微机数据处理技术等的出现把激光多普勒技术推向更高水平,使用调整更加方便。
此外,半导体激光器的应用是其小型化成为可能,推动激光多普勒测速走出实验室,迈向工业和现场应用。
激光的多普勒效应是激光多普勒测速技术的重要理论基础,当光源和运动物体发生相对运动时,从运动物体散射回来的光会产生多普勒频移,这个频移量的大小与运动物体的速度,入射光和速度方向的夹角都有关系[1]。
双纵模He—Ne激光器的多普勒测速系统
Re s u l t s o f t he t he o r y a n a l y s i s a nd e x pe im e r n t s h o w t ha t t he d u a l ・ ・ l o n g i t u d i n a l - ・ mo d e l a s e r D o p p l e r
s y s t e m wa s d e s i g n e d.An d he t Do p p l e r s i g n l a wa s p r o c e s s e d u s i n g he t d i g i t a l il f t e in r g n d a a u t o c o r r e l a t i o n.
的拍 频作 为基频 大 大减 小 了比例 因子 , 解 决 了系统进行 高速 及超 高速测 量的 难题 ; 数 字滤 波去 除直 流
基 底和 部 分噪 声 ; 自相 关技 术进 一 步抑 制噪 声 , 提 高 了信 噪 比 , 便 于精确 提取 多普 勒频 率 。测 量 了高
速 转盘 上待 测 点切 向运动 的 速度 , 测 量 结果 的重 复性精 度优 于 0 . 8 %。
La s e r Do pp l e r v e l o c i me t e r ba s e d o n du a l - - l o n g i t u d i n a l ・ - mo de
激光测转速的原理

激光测转速的原理
使用激光测量转速的基本原理是:
一、激光的方向性
激光能量高度集中,射线路径非常直,可准确照射目标。
二、多普勒效应
当光源和接收器中的一个运动时,接收的光频率将发生多普勒位移。
三、测速系统构成
1. 激光发射装置:发出稳定的激光束。
2. 转动目标:反射激光的转动物体。
3. 接收装置:接收反射光并检测频移。
4. 信号处理:分析频移信息,计算转速。
四、工作原理
1. 激光照射在转动目标表面,被反射入接收器。
2. 当目标表面朝接近光源方向转动时,反射光频率增大。
3. 当目标表面朝远离光源方向转动时,反射光频率减小。
4. 通过分析反射光的多普勒频移变化,可以计算出转动速度。
五、测量时注意事项
1. 确保激光照射稳定,光束准直。
2. 接收装置要求足够灵敏度。
3. 增加重复测量次数,取平均值以提高准确度。
4. 标定测试装置,校准反射材料参数。
5. 计算时滤除环境噪声干扰。
综上所述,激光测转速利用了激光的方向性和多普勒效应原理,通过检测频移变化
测量旋转目标的转速。
这是一种高精度的非接触式测速方法。
激光多普勒测速仪介绍(LDV)

激光多普勒测速仪1 激光多普勒测速仪概念激光多普勒测速仪(LDV: Laser Doppler Velocimetry),是应用多普勒效应,利用激光的高相干性和高能量测量流体或固体流速的一种仪器,它具有线性特性与非接触测量的优点,并且精度高、动态响应快。
由于它大多数用在流动测量方面,国外习惯称它为激光多普勒风速仪(Laser Doppler Anemometer,LDA),或激光测速仪或激光流速仪(Laser Velocimetry,LV)的。
示踪粒子是利用运动微粒散射光的多普勒频移来获的速度信息的。
因此它实际上测的是微粒的运动速度,同流体的速度并不完全一样。
幸运的是,大多数的自然微粒(空气中的尘埃,自来水中的悬浮粒子)在流体中一般都能较好地跟随流动。
如果需要人工播种,微米量级的粒子可以同时兼顾到流动跟随性和LDV测量的要求。
图1 德国elovis激光多普勒测速仪2 激光多普勒测速仪组成(1)激光器(2)入射光学单元(3)频移系统(4)接受光学单元(5)数据处理器3 激光多普勒测速仪基本原理仪器发射一定频率的超声波,由于多普勒效应的存在,当被测物体移动时(不管是靠近你还是远离你)反射回来波的频率发生变化,回收的频率是(声速±物体移动速度)/波长,由于和波长都可以事先测出来(声速会随温度变化有所变化,不过可以依靠数学修正),只要将回收的频率经过频率-电压转换后,与原始数据进行比较和计算后,就可以推断出被测物体的运动速度。
图2 激光多普勒测速仪基本原理图4 激光多普勒测速仪特点和应用1)激光多普勒测量仪应用多普勒频差效应的原理,结构紧凑、重量轻、容易安装操作、容易对光调校;2)激光多普勒测量仪可以在恒温,恒湿,防震的计量室内检定量块,量杆,刻尺和坐标测量机等。
3)激光多普勒测量仪既可以对几十米甚至上百米的大量程进行精密测量,也可以对手表零件等的微小运动进行精密测量;既可以对几何量如长度、角度、直线度、平行度、平面度、垂直度等进行测量,也可以用于特殊场合,诸如半导体光刻技术的微定位和计算机存储器上记录槽间距的测量等等。
激光多普勒测速matlab代码

激光多普勒测速是一种非常重要的测速技术,它可以用于测量目标的速度、距离和运动状态。
在工程领域广泛应用于雷达、车载测速仪、医学影像和气象预报等方面。
激光多普勒测速通过检测目标表面反射的激光脉冲信号,利用多普勒效应来计算目标的速度。
本文将介绍激光多普勒测速的原理和相关的matlab代码实现方法。
一、激光多普勒测速原理激光多普勒效应是指当激光束与运动物体相互作用时,由于多普勒频移导致激光波长发生变化。
当激光束照射到物体表面并被反射回来时,如果物体在照射过程中发生了运动,那么反射回来的激光波长就会发生变化,从而可以通过探测这种波长变化来计算物体的速度。
二、激光多普勒测速的matlab代码实现在matlab中实现激光多普勒测速的代码可以分为以下几个步骤:1. 生成模拟的激光脉冲信号```matlabfs = 1000; 采样频率t = 0:1/fs:1-1/fs; 采样时间f0 = 100; 信号起始频率f1 = 200; 信号终止频率s = chirp(t,f0,1,f1,'linear'); 生成线性调频信号```2. 模拟目标运动引起的频率变化```matlabv = 10; 目标运动速度c = 3e8; 光速fD = 2*v*f1/c; 多普勒频移```3. 计算多普勒效应后的信号```matlaby = s.*exp(1j*2*pi*fD*t); 多普勒效应后的信号```4. 进行信号处理和频谱分析```matlabN = length(y); 信号长度f = (-N/2:N/2-1)*fs/N; 频率坐标yfft = fft(y,N); 进行傅里叶变换yfftshift = fftshift(yfft); 进行频率移位figure;plot(f,abs(yfftshift)); 绘制频谱图```经过以上步骤,我们就可以得到模拟激光多普勒测速的matlab代码实现。
通过对生成的激光脉冲信号进行频谱分析,可以观察到多普勒频移的效果,从而实现对目标速度的测量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
激光多普勒测速系统
一、概述:
项目背景:
该项目主要通过激光器和激光接收机实时检测目标的XYZ方向上的相对速度,并将3个方向的速度值矢量合成后,通过串口上报给主机。
系统原理如下:
●通过特殊的调制信号激励激光器,发射连续波激光。
●同时在不同阶段接收从目标反射回的信号并通过高速ADC采集这些信号。
●FPGA实时进行FFT计算,根据FFT结果比较不同阶段的频偏和符号。
●根据多普勒效应,通过频偏大小和频偏方向,就能计算出目标的相对速度和方向。
●3个通道通过不同角度的合成,可以最终计算出目标的相对矢量速度。
●通过串口将速度数据传到上位机。
系统原理框图如下:
我们面临的挑战:
●由于物体相对速度较快,达到125m/s;对应的信号带宽为DC-250MHz左右,
需要1GHz进行高速采集。
●同时对1Gsps的数据量进行最大32K点FFT时,数据覆盖率达50%上。
此时单
一的FFT模块在FPGA中计算时间不够,需要4路FFT并行计算;逻辑设计难
度较大。
●要求测试距离在3KM以上。
由于激光在大气中的衰减比较严重,同时受到大气
的干扰也比较严重。
致使回波信号比较弱,同时不稳定。
示波器捕获的原始数据
解决方案:
根据实际系统和算法处理精度要求,硬件系统采用如下设计:
⏹10bit1GSPS ADC,三通道同步采集。
⏹低噪声模拟前端,支持程控增益放大,50Ω阻抗SMA接口。
⏹模拟带宽DC-250MHz。
⏹板载1024MB DDR3内存。
⏹高稳定度,超低低抖动时钟发生器。
⏹低噪声电源设计。
⏹采用Xilinx XC5VSX95T FPGA,FPGA实现实时FFT和信号检测算法功能。
⏹TI C6455DSP,工作频率1GHz,用于3波束速度合成算法和FPGA控制。
⏹两个RS422/RS485接口。
二、系统整体框图如下:
系统整机的实物图如上
系统整机飞行测试如上三、信号的实时处理:
3.1逻辑总体设计框图:
3.2激励激光器的调制波形如下:
分为三个阶段:平直部分6.3ms;上升部分1mS;下降部分1mS。
(有可能以后会有微调,如平直部分7.3ms,上升部分0.5mS,下降部分0.5mS,波形幅度,峰峰值1~4V可调。
根据三个不同阶段分别采集一段数据,再将这些数据实时进行FFT计算:
3.4并行FFT计算:
根据测算,P1阶段16384个点的FFT次数约为96次,P2和P3阶段的16384点FFT 次数约为34次左右。
采集数据率为1000Msps,FFT实时工作频率为250MHz,这就需要4通道FFT并行计算才能满足数据的实时要求。
实时FFT系统架构
在1G采样率下最大32K点FFT的数据处理方式如下:
3.5峰值查找和频偏计算:
以第一阶段为基准,通过谱平均和功率判决找到第二阶段和第三阶段相对第一阶段的频偏和方向(正负频偏),如下图所示:
3.6自动信号增益控制:
由于随着目标距离越来越远,反馈的信号会越来越弱,这就需要自动增益控制来控制前端放大器的增益,来保障最大的系统信噪比。
AGC的实现框图。