优先矩阵转化为优先函数
R语言rank函数详细解析

R语⾔rank函数详细解析1.rank函数是什么rank相关⽂档[1]可以译为"返回原数组(?)中各个元素排序(?)后的秩次(?)",表⾯上看确实可以得到次序,但对数组、排序、秩次交待不清。
2.rank函数使⽤情景⽐如,在100⽶赛跑中,甲⼄丙三⼈的成绩为6.8s, 8.1s, 7.2s,那么⽤rank函数排序获得名次:> rank(t <- c(6.8, 8.1, 7.2))[1] 1 3 2再如,甲⼄丙三⼈考试得分为74,92,85,⽤同样⽅法取得名次会适得其反。
当然,我们可以认为执⾏> rank(-(s <- c(74, 92, 85)))[1] 3 1 2可以达到⽬的,但这并未改变rank函数的排序机制。
3.rank函数排序类型rank(x, st = TRUE,ties.method = c("average", "first", "random", "max", "min"))> t <- c(4, NaN, 4, 7, 8, 2, NaN, 9, 9, 7, NaN, 5, 2, 2, 1)#同时对相应元素做好标记> names(t) <- letters[1 : length(t)]通过以上⽅法进⾏排序,得出Resulta b c d e f g h i j k l m n ooriginal4NaN4782NaN997NaN5221average 5.513.0 5.58.510.0 3.014.011.511.58.515.07.0 3.0 3.0 1.0first513681021411129157341random (1)613591021411128157341random (2)513681021411129157431max613691041412129157441min513581021411118157221我们发现,标签"b","g","k"的次序并未发⽣改变,可推断ties.method作⽤在于处理⾮缺失值的顺序。
TSP问题的解决方案

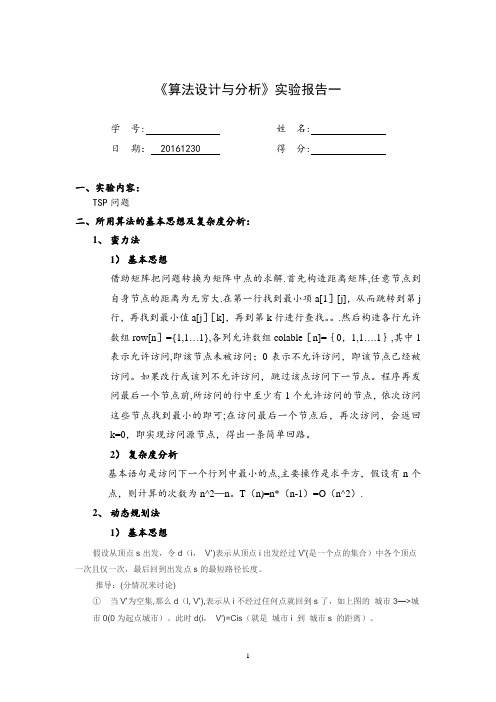
《算法设计与分析》实验报告一学号:姓名:日期:20161230 得分:一、实验内容:TSP问题二、所用算法的基本思想及复杂度分析:1、蛮力法1)基本思想借助矩阵把问题转换为矩阵中点的求解。
首先构造距离矩阵,任意节点到自身节点的距离为无穷大。
在第一行找到最小项a[1][j],从而跳转到第j行,再找到最小值a[j][k],再到第k行进行查找。
然后构造各行允许数组row[n]={1,1…1},各列允许数组colable[n]={0,1,1….1},其中1表示允许访问,即该节点未被访问;0表示不允许访问,即该节点已经被访问。
如果改行或该列不允许访问,跳过该点访问下一节点。
程序再发问最后一个节点前,所访问的行中至少有1个允许访问的节点,依次访问这些节点找到最小的即可;在访问最后一个节点后,再次访问,会返回k=0,即实现访问源节点,得出一条简单回路。
2)复杂度分析基本语句是访问下一个行列中最小的点,主要操作是求平方,假设有n个点,则计算的次页脚内容1数为n^2-n。
T(n)=n*(n-1)=O(n^2)。
2、动态规划法1)基本思想假设从顶点s出发,令d(i, V’)表示从顶点i出发经过V’(是一个点的集合)中各个顶点一次且仅一次,最后回到出发点s的最短路径长度。
推导:(分情况来讨论)①当V’为空集,那么d(i, V’),表示从i不经过任何点就回到s了,如上图的城市3->城市0(0为起点城市)。
此时d(i, V’)=Cis(就是城市i 到城市s 的距离)、②如果V’不为空,那么就是对子问题的最优求解。
你必须在V’这个城市集合中,尝试每一个,并求出最优解。
d(i, V’)=min{Cik +d(k, V’-{k})}注:Cik表示你选择的城市和城市i的距离,d(k, V’-{k})是一个子问题。
综上所述,TSP问题的动态规划方程就出来了:2)复杂度分析和蛮力法相比,动态规划求解tsp问题,把原来时间复杂性O(n!)的排列转化为组合问题,从而降低了时间复杂度,但仍需要指数时间。
矩阵的初等变换规则

矩阵的初等变换规则
(一)初等变换的规则
1. 交换行法:将矩阵中的两行互换,行对应元素也随之改变。
2. 改变系数法:将矩阵中的某行乘以一定的非零常数,行对应的元素也随之改变。
3. 复合法:将矩阵中的某行乘以一定的非零常数后,与另一行按和或差的方法结合,行对应的元素也随之改变。
4. 交换列法:将矩阵中的两列互换,列对应的元素也随之改变。
(二)初等变换的意义
初等变换是用来将一个线性方程组转化为一个有解的线性方程。
使用初等变换的原则,如将两个方程乘以不同的负数,甚至一步就能解出有解的线性方程,使方程系数矩阵更加简洁,容易操作。
同时这也可以使我们更加清楚地理解线性方程和不同解的对应关系。
(三)初等变换的应用
1. 运用初等变换可以将零向量和零矩阵转换为方便求解的标准乘法型和齐次方程组。
2. 初等变换可以用来求解边界值来解决边界值问题,为做出最终的选择提供保障。
3. 使用初等变换可以有效地求解线性方程组,给出正确的结果,对计
算机科学方面有很大帮助。
4. 初等变换可以用来求解有关矩阵与特征值、特征向量的求解问题,计算机硬件和软件设计中也有着广泛的应用。
2015蒋立源《编译原理》第3版桂电期末复习作业答案概论
《编译原理》课后习题答案第一章1.解:源程序是指以某种程序设讣语言所编写的程序。
IJ标程序是指编译程序(或解释程序)将源程序处理加工而得的另一种语言(IJ标语言)的程序。
翻译程序是将某种语言翻译成另一种语言的程序的统称。
编译程序与解释程序均为翻译程序,但二者工作方法不同。
解释程序的特点是并不先将高级语言程序全部翻译成机器代码,而是每读入一条高级语言程序语句,就用解释程序将其翻译成一段机器指令并执行之,然后再读入下一条语句继续进行解释、执行,如此反复。
即边解释边执行,翻译所得的指令序列并不保存。
编译程序的特点是先将高级语言程序翻译成机器语言程序,将其保存到指定的空间中,在用户需要时再执行之。
即先翻译、后执行。
2.解:一般说来,编译程序主要曲词法分析程序、语法分析程序、语义分析程序、中间代码生成程序、代码优化程序.Ll标代码生成程序、信息表管理程序、错误检查处理程序组成。
3.解:C 语言的关键字有:auto break CaSe Char COnSt COntinUe default do double elseenum extern float for goto if int IOng register return ShOrt Signed SiZeOf Static StrUCtSWitCh typedef UniOn UnSigned VOid VOlatile Whileo上述关键字在C语言中均为保留字。
4.解:C语言中括号有三种:{},[], O o其中,{}用于语句括号;[]用于数组;O用于函数(定义与调用)及表达式运算(改变运算顺序)。
C 语言中无END关键字。
逗号在C语言中被视为分隔符和运算符,作为优先级最低的运算符,运算结果为逗号表达式最右侧子表达式的值(如:(d,b,C,d)的值为d) O5.略第二章2 •构造产生下列语言的文法(1){anbn I n≥0)解:对应文法为G(S)二({S}, {a, b}, { Sf £ aSb },S)(2){anbmcp ∣n, m, p≥0}解:对应文法为G(S) = ({S, X, Y}, {a,b,c}, {S→aS X, X→bX Y, Y→cY £},S)(3){an # bn n≥0} U {cn # dn n≥O}解:对应文法为G(S) = ({S,X,Y}, {a,b, c,d,#}, {S→X, S→Y, X→aXb∣tt, Y →cYd∣# },S)(4){w#wr# I w?{O, 1}*, Wr 是W 的逆序排列}解:G(S) = ({S,W,R}, {O, 1,#}, {ST#, W→OWO∣1W1∣#},S)(5)任何不是以O打头的所有奇整数所组成的集合解:G(S) = ({S,A,B,I, J}, {-,0, 1,2,3,4,5,6,7, & 9},{S-J IBJ,B- OB IB e, I->J∣2∣4∣6∣8,Jδl13151719}, S)(6)所有偶数个0和偶数个1所组成的符号串集合解:对应文法为SfoA IBe AfOS lC BfoC ; IS CfIA OB7 •解:^Cb是文法G[S]中的句子,相应语法树是:最右推导:S=>aAcB=>aAcb=>aacb最左推导:S=>aAcB=>aacB=>aacb(2)aabacbadcd不是文法G[S]中的句子因为文法中的句子不可能以非终结符d结尾< 3) aacbccb不是文法G[S]中的句子可知,aacbccb仅是文法G[S]的一个句型的一部分,而不是一个句子。
自底向上的语法分析解读
程序4-4 简单优先分析驱动程序
int parser(void){ int i=0,k=0,r;stack[0]='#'; r=a[k++]; do{ int j,LeftSide; while(!IsHigherThan(stack[i],r)) {stack[++i]=r;r=a[k++];} j=i; while(! IsLowerThan (stack[j-1], stack[j])) j--; LeftSide= RightSideOfAProduction (stack[j],stack[i],i-j+1); if(LeftSide){ /*LeftSide!=0 means the production exists */ i=j;stack[i]=LeftSide; }else /* There is no production which matches the right side */ if(i==2 && r=='#' && stack[i] == STARTSYSBOL) return SUCCESS; else return ERROR; } while (1); } /* end of parser */
与的句柄之间的关系必有下述情况之一: A A
A
… … s t ... … … s t … ... … … s t … ... 1. s在句柄中, 3. s不在句柄中,而t 2. s与t均在句 而t不在句柄中 在句柄中 柄中 对于上述情况,我们规定, 情况1: s>t; 情况2: s=t; 情况3: s<t 另外,还有一种情况,就是s和t均不在句柄中,那么一定存在某句 型使得它们进入上述三种情况之一.
DCM介绍

DCM介绍1DCM简介DCM全称为Dimensional Constraint Manager(标注约束管理器)。
它是由软件模块的形式发布,可以和应用程序进行集成,来完成二维CAD领域的参数化设计功能。
1.1DCM提供的功能DCM作为一个软件组件,可以操作几何设计来满足给定的约束条件。
DCM 关注于二维空间(或者三维空间的二维子空间)的无界限的直线、圆、点和参变量几何体。
它包括了两类约束,分别是标注约束(长度和角度)以及逻辑(几何)约束(比如平行、垂直、相切和同心)。
当调用DCM进行计算约束时,以下两个步骤会执行:●DCM首先分析几何体之间的相对关系,并且决定使用什么样的解决方案;●DCM重新计算几何体以满足标注约束的需要。
在使用约束的设计过程中,这两个步骤可以识别和求解问题域。
它可以保证几何体不依赖于任何的问题域进行重新求解,同时可以避免任何可能影响几何体的相对位置的改变。
它还可以保证仅仅当标注值改变时快速的进行重新计算(因为求解过程的第一个步骤不需要进行重复)。
为了给设计者提供最大的灵活性,DCM使用的算法与几何约束体以及标注约束的顺序是无关的,也就是说可以在任意时刻添加、删除以及改变约束。
通过上述机制,应用程序可以通过恢复相关的约束几何体以及标注约束找回先前的状态。
DCM的一个最主要的特性是它可以用来处理欠约束和过约束数据,这样用户就可以很容易的建立完全约束。
欠约束是指没有足够的标注和逻辑约束来唯一的确定几何体数据;而过约束是指几何体数据含有过多的或者相冲突的标注和逻辑约束。
欠约束几何体通过计算可以满足应用到其的任何约束,即使这些约束不能唯一的定义这个几何体。
这种情况下,应用程序可以影响DCM返回的实际的求解值。
1.2在应用程序中使用DCMDCM有一个很大的优点,就是它专门设计为一个模块,可以加入到任何的应用程序中。
在任何可能的地方,DCM总是使用非迭代的算法从而使得DCM运算速度非常快。
基于Vague集的TOPSIS法求解目标优先级

同 。 义 目标类 型 影 响系数 (D) ( ) o 1 。 定 , , ∈E ,]
1 2 目标 优 先级 函数 .
离 我方 防 区越远 , 目标 优先 级 越低 ; 之 越 高 ; 目 反 ⑥
标 飞 临 我方 防 区时 间越 长 , 武器 系 统用 于 目标 分 配 及射 击 准备 的时 间越充 分 , 目标 优先 级越 低 , 之越 反 高。
VO . 3 NO 5 1 7, .
M a 2 2 y, 01
火 力 与 指 挥 控 制
FieCo r l& Comma d Conr l r nto n to
第 3 7卷 第 5期 21 0 2年 5月
文 章 编 号 :0 2O4 (O 2O —1 00 1 0 一6 O 2 1 ) 50 4— 4
Re e r h o s a c n TOPS S Ba e g e s Us d t I - s d Va ue S t e o S l e Ta g t i r t v l o v r e s Pr o iy Le e s
TONG u S J n. HAN n l Ga —i n
目标 优先 级 函数是 反 映 目标 优 先级 高低 的数 学
量 。 设 目标 i 假 的优先 级 函数 为 P , o 1 , 值 P ∈E , ] 其
反 映 目标 i 所有 目标 中的排 序 位数 , 越 大 , 在 p值 对
应 目标 i 的排序 越靠 前 。 当有上 级 指示 作用 于 目标 i 时, 优先 级 最高 , 排在第 一 位 。此 时取 P 一1 当没 应 ;
一
ቤተ መጻሕፍቲ ባይዱ
个 真 隶 属 函 数 t 一 个 假 隶 属 函 数 表 示 , 和
TSP问题的解决方案
《算法设计与分析》实验报告一学号: 姓名:日期: 20161230 得分:一、实验内容:TSP问题二、所用算法的基本思想及复杂度分析:1、蛮力法1)基本思想借助矩阵把问题转换为矩阵中点的求解.首先构造距离矩阵,任意节点到自身节点的距离为无穷大.在第一行找到最小项a[1][j],从而跳转到第j行,再找到最小值a[j][k],再到第k行进行查找。
.然后构造各行允许数组row[n]={1,1…1},各列允许数组colable[n]={0,1,1….1},其中1表示允许访问,即该节点未被访问;0表示不允许访问,即该节点已经被访问。
如果改行或该列不允许访问,跳过该点访问下一节点。
程序再发问最后一个节点前,所访问的行中至少有1个允许访问的节点,依次访问这些节点找到最小的即可;在访问最后一个节点后,再次访问,会返回k=0,即实现访问源节点,得出一条简单回路。
2)复杂度分析基本语句是访问下一个行列中最小的点,主要操作是求平方,假设有n个点,则计算的次数为n^2—n。
T(n)=n*(n-1)=O(n^2).2、动态规划法1)基本思想假设从顶点s出发,令d(i,V’)表示从顶点i出发经过V’(是一个点的集合)中各个顶点一次且仅一次,最后回到出发点s的最短路径长度。
推导:(分情况来讨论)①当V’为空集,那么d(i, V’),表示从i不经过任何点就回到s了,如上图的城市3—>城市0(0为起点城市)。
此时d(i,V')=Cis(就是城市i 到城市s 的距离)、②如果V’不为空,那么就是对子问题的最优求解.你必须在V’这个城市集合中,尝试每一个,并求出最优解。
d(i, V')=min{Cik + d(k,V'-{k})}注:Cik表示你选择的城市和城市i的距离,d(k, V’—{k})是一个子问题。
综上所述,TSP问题的动态规划方程就出来了:2)复杂度分析和蛮力法相比,动态规划求解tsp问题,把原来时间复杂性O(n!)的排列转化为组合问题,从而降低了时间复杂度,但仍需要指数时间。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种方便地求算符优先函数的方法——迭代法
若已知运算符之间的优先关系,可按如下步骤构造优先函数:
1、对每个运算符a(包括#在内)令f(a)=g(a)=1
2、如果a⋗b且f(a)<=g(b)令f(a)=g(b)+1
3、如果a⋖b且f(a)>=g(b)令g(b)= f(a)+1
4、如果a≐b而f(a) ≠g(b),令min{f(a),g(b)}=max{f(a),g(b)}
5、重复2~4,直到过程收敛。
如果重复过程中有一个值大于2n,则
表明不存在算符优先函数。
代码为:
#include <stdio.h>
#include <stdlib.h>
#define MaxSize 100
#define MaxOp 9
struct
{
char ch; //运算符
int pri; //优先级
}
lpri[]={{'+',1},{'-',1},{'*',1},{'/',1},{'(',1},{')',1},{'#',1}},
rpri[]={{'+',1},{'-',1},{'*',1},{'/',1},{'(',1},{')',1},{'#',1}};
int f(char op) //求左运算符op的优先级
{
int i;
for (i=0;i<MaxOp;i++)
if (lpri[i].ch==op) return lpri[i].pri;
}
int g(char op) //求右运算符op的优先级
{
int i;
for (i=0;i<MaxOp;i++)
if (rpri[i].ch==op) return rpri[i].pri;
}
/*int InOp(char ch) //判断ch是否为运算符
{
if (ch=='(' || ch==')' || ch=='+' || ch=='-' || ch=='*' || ch=='/'||ch=='#') return 1;
else
return 0;
char Precede(char c1,char c2)
{
int i=0,j=0;
static char array[49]={
'>', '>', '<', '<', '<', '>', '>',
'>', '>', '<', '<', '<', '>', '>',
'>', '>', '>', '>', '<', '>', '>',
'>', '>', '>', '>', '<', '>', '>',
'<', '<', '<', '<', '<', '=', '!',
'>', '>', '>', '>', '!', '>', '>',
'<', '<', '<', '<', '<', '!', '='};
switch(c1) /* i为下面array的横标*/
{
case '+' : i=0;break;
case '-' : i=1;break;
case '*' : i=2;break;
case '/' : i=3;break;
case '(' : i=4;break;
case ')' : i=5;break;
case '#' : i=6;break;
}
switch(c2) /* j为下面array的纵标*/
{
case '+' : j=0;break;
case '-' : j=1;break;
case '*' : j=2;break;
case '/' : j=3;break;
case '(' : j=4;break;
case ')' : j=5;break;
case '#' : j=6;break;
}
return (array[7*i+j]); /* 返回运算符*/
}
void main()
int i,j,k=1;
while(k!=0)
{
k=0;
for(i=0;i<7;i++)
{
for(j=0;j<7;j++)
{
if(Precede(lpri[i].ch,rpri[j].ch)=='>'&&f(lpri[i].ch)<=g(rpri[j].ch))
{ lpri[i].pri=rpri[j].pri+1;k=1;}
else if(Precede(lpri[i].ch,rpri[j].ch)=='<'&&f(lpri[i].ch)>=g(rpri[j].ch))
{ rpri[j].pri=lpri[i].pri+1;k=1;}
}
}
}
printf(" ");
for(i=0;i<7;i++)
printf("%3c",lpri[i].ch);
printf("\n");
printf("入栈优先函数f:");
for(i=0;i<7;i++)
printf("%3d",lpri[i].pri);
printf("\n");
printf("比较优先函数g:");
for(i=0;i<7;i++)
printf("%3d",rpri[i].pri);
printf("\n");
}。