压缩式垃圾车控制系统设计
压缩式垃圾车技术综述

..}..专用汽车Special Purpose VehiclesThe Summarization of Compressed Garbage Truck TechnologyThis paper summarizes the compressed garbage truck. It also expounds the actualities, the ex- isting problems and corresponding solutions. At last, this paper points out the developing trends of compressed garbage truck in China.编者按:本文阐迷压编式垃圾车的种类,我国压编式垃极牟的现状、存在的问题以及解决办法,我国压编式垃极车的发展趋势,对引导行业发展具有一定的参考价值。
压缩式垃圾车是一种高效收集、转运垃圾的城市环卫专用车辆,在垃圾收集、转运过程中可避免沿途撒漏而造成的二次污染,是城市环卫工作的理想设备,是专用汽车行业“十一五”专项发展规划提出的孟点发展车型之一。
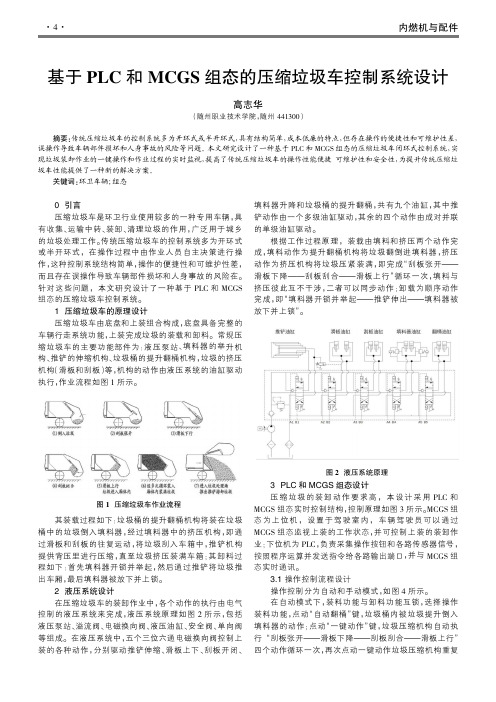
压幼式垃级车的分类及后装式压组机构的工作过程压缩式垃圾车又分为前装压缩式垃圾车(图1)、侧装压缩式垃圾车(图2)和后装压缩式垃圾车(图3)等.目前,后装压缩式垃圾车已成为我国城市生活垃圾收集、运翰的主要工具之一。
压缩式垃圾车采用机电液一体化技术,借助机一电一液联合控制系统,通过车厢坡装器等专用装t,实现垃圾倒入、压碎或压扁和强力装坡,把垃圾挤入车厢并第1阶段:摆动板向上摆动,做好插入松散垃圾内的准备。
第2阶段:导向板带动摆动板向下移动,插入收集箱中的松散垃圾.第3阶段:摆动板向下作圆弧摆动,刮动垃圾使其开始进入主厢中。
第4阶段:导向板带动摆动板向上移动,将垃圾坟装到主厢中去,这样就完成一次城装循环。
压缩式垃圾车具有压力大、密封性好、装载f大、操作方便、环保性好等优点。
基于PLC和MCGS组态的压缩垃圾车控制系统设计
其装载过程如下:垃圾桶的提升翻桶机构将装在垃圾桶中的垃圾倒入填料器,经过填料器中的挤压机构,即通过滑板和刮板的往复运动,将垃圾刮入车箱中,推铲机构提供背压里进行压缩,直至垃圾挤压装满车箱;其卸料过程如下:首先填料器开锁并举起,然后通过推铲将垃圾推出车厢,最后填料器被放下并上锁。
2液压系统设计在压缩垃圾车的装卸作业中,各个动作的执行由电气控制的液压系统来完成,液压系统原理如图2所示,包括液压泵站、溢流阀、电磁换向阀、液压油缸、安全阀、单向阀3PLC和MCGS组态设计压缩垃圾的装卸动作要求高,本设计采用PLC和MCGS组态实时控制结构,控制原理如图3所示。
MCGS组态为上位机,设置于驾驶室内,车辆驾驶员可以通过MCGS组态监视上装的工作状态,并可控制上装的装卸作业;下位机为PLC,负责采集操作按钮和各路传感器信号,按照程序运算并发送指令给各路输出端口,并与MCGS组态实时通讯。
3.1操作控制流程设计操作控制分为自动和手动模式,如图4所示。
在自动模式下,装料功能与卸料功能互锁,选择操作装料功能,点动“自动翻桶”键,垃圾桶内被垃圾提升倒入填料器的动作;点动“一键动作”键,垃圾压缩机构自动执图1压缩垃圾车作业流程图2液压系统原理循环一次。
选择“卸料”功能,点动“一键动作”键,自动顺序执行填料器升、推铲伸、填料器降等3个动作循环一次。
在手动模式下,操作垃圾桶“升”、“降”,刮板“开”、“闭”,滑板“上”、“下”,填料器“升”“降”,推铲“伸”、“缩”十个键,可单独执行相应的动作,为了安全,其动作互锁保护如下:①填料器升起的限位信号不许可,推铲动作指令不响应;②填料器降下降的限位型号不许可,垃圾桶提升翻桶动作、刮板动作、滑板动作均不响应。
3.2操作面板设计车外操作面板如所示,其中1和2位三档自保持旋钮,3和4位自复位按钮,5为急停按钮,6、7、8、9和10为3.3PLC控制设计根据上装的工作流程,控制器选用三菱FX系列或西门子S7系列的小型PLC,其控制方式为闭环式。
压缩垃圾车使用说明书
压缩式垃圾车使用说明书厦工楚胜()专用汽车制造前言后装压缩式垃圾车是用于垃圾收集、转运的环卫专用车。
•装备有密封车厢体、填装器、推铲、液压传动系统和电气控制系统。
•垃圾从车后部填装口倒入, 经破碎、压缩压入车厢,因而装载容量比一般垃圾车大。
装卸垃圾时既不污染环境,又减轻了清洁工人的劳动强度。
本公司生产的后装压缩式垃圾车采用了电脑控制自动操作装置,自动化程度高。
本说明书只介绍专用设备的结构特点、原理、操作方法、保养和故障排除。
车辆底盘的使用保养见底盘使用说明书。
购置楚胜牌汽车获得最佳效益,是我们和您共同追求的目标,但很大程度取决于您对车辆操作的熟练程度和保养的仔细、深浅程度。
我们诚恳地希望您在使用车辆之前,能够通读本手册,并对其中介绍的操作程序做到得心应手。
本手册是车辆的一部分,应与车辆一起保存和使用。
我公司对产品会作不断的改进,改进的情况恕不一一通知您。
因此,有可能出现本手册的介绍与实际结构不同的情况,敬请谅解。
在车辆的使用、保养和调整过程中,请您根据车辆的实际装备情况,按照使用说明书相应容进行。
一.概述采用载重质量3~12吨底盘改装生产的CSC5060ZYS~5250ZYS型系列压缩式垃圾车后装压缩型式,是厦工楚胜()专用汽车制造在吸收多种国外同类产品优点的基础上,自主开发、设计的新一代后装压缩式垃圾车。
该车外形美观,性能优良,操纵控制先进,采用后装压缩和双向压缩技术完成对城镇生活垃圾的收集和转运,装载能力强,装载量大,其综合性能达到国同类产品的先进水平。
底盘采用东风、解放等二类汽车底盘,品质优良,发动机功率强劲,排放达到国(欧)Ⅲ和国(欧)Ⅳ标准。
主要适用于城镇居民区、社区、大型厂矿和机关院校的桶装、袋装和散装生活垃圾的收运。
拥有多种翻桶(斗)机构,适用于不同用户的多种垃圾收集方式。
二.垃圾车外形图(以下几种为任选的代表车型)1.东风天锦后装压缩带摆臂(选装)2.东风福瑞卡后装压缩带挂桶(选装铁桶或塑料桶)3.东风天龙垃圾车三.主要技术参数和性能产品型号CSC5070ZYS4 CSC5082ZYS4 CSC5128ZYSE CSC5161ZYSD12 底盘型号DFA1070SJ35D6 DFA1080SJ12D3 EQ1128GLJ DFL1160BX4 货厢容积m3 6 8 10 12尺寸参数长×宽×高mm 6550X2050X2600 7160X2250X26508150X2480X32508850X2490X3220轴距mm 3300 3800 3950 4500轮距前mm 1506 1770 1880 1880后mm 1466 1586 1800 1860*.以上车型的参数只是列举部分,没有的车型参数以公告为准四.压缩式垃圾车的工作原理1. 垃圾压缩填装过程垃圾压缩填装过程见图一,步骤(1),为起始位置,当填装料斗装满垃圾后,刮板打开,作好插入松散垃圾的准备,步骤(2),滑板带动刮板一起向下移动,插入垃圾中进行破碎和首次压缩。
压缩式垃圾车双动力液压控制系统设计

压缩式垃圾车双动力液压控制系统设计作者:孔德军陈军来源:《专用汽车》 2011年第10期孔德军陈军江苏悦达专用车有限公司江苏盐城224007摘要:为了减少油耗、降低排放、减小噪音不扰民,在8t及16 t的压缩式垃圾车上设计加装了一组电机驱动的动力源,从而实现了垃圾车的双动力控制,提高了使用的经济性及环保性,同时降低了使用时的噪音。
关键词:压缩式垃圾车双动力液压系统电机中图分类号:U469.6+91.02文献标识码:A文章编号:1004-0226(2011)10-0076-021前言压缩式垃圾车是在汽车二类底盘上改装而成的,它主要由汽车底盘、车厢、排出机构、填料器刮板总成及倾倒装置等组成。
压缩车的装填、压缩、卸料等动作都是通过液压控制系统来实现的。
为了满足环卫部门提出的减少油耗、降低排放、减少噪音及不扰民等要求,需在垃圾车底盘上加装了一组由电机直接驱动齿轮泵的动力源。
2压缩式垃圾车的液压系统组成压缩式垃圾车的液压系统主要由动力装置(齿轮泵通过底盘PTO取力驱动)、排出板油缸、上刮板油缸、下刮板油缸、填料器举升油缸、自动锁油缸、多路换向阀、插入二位二通电磁阀及液压油箱、管路、管接头等组成。
液压系统配置如图1所示。
垃圾车底盘加装动车源装置如图2所示,这组动力源与原底盘PTO驱动的动力源并联起来,且为了避免两个动力源之间干涉,在这两组动力源接入系统之前,都加装了一组单向阀,其原理如图3所示。
双动力控制压缩式垃圾车,可使压缩式垃圾车的使用更加灵活、可靠。
当压缩车行驶到配有电源插头的垃圾收集点或垃圾站时,通过驱动电机就可以完成垃圾的收集工作。
此时,底盘可以熄火,这样既实现了零排放,又降低了噪音,解决了扰民问题。
同时双动力控制的压缩式垃圾车也可以通过选择底盘PTO驱动的动力源进行道路边的垃圾收集工作。
整个液压系统工作流程如图4所示。
6结语增加一组电机驱动的动力源后,压缩式垃圾车的使用更加灵活可靠,在选择使用电机驱动的动力源时,能够做到零排放、低噪音,基本解决了扰民的问题。
后压缩式垃圾车工作原理
后压缩式垃圾车工作原理
后压缩式垃圾车是一种新型的垃圾运输设备,主要用于小区、学校、广场、工厂等场所的生活垃圾和建筑垃圾的运输。
后压缩式垃圾车的液压系统、电控系统和机械传动系统组成。
电控系统是由车载电脑(微机)、控制电路和传感器三部分组成,采用微
机控制,可实现对汽车发动机的启、停;油门的控制;点火开关,及多路换向阀的控制;与汽车变速箱或后桥相连接的减速器驱动液压马达,再通过减速器带动车轮转动。
后压缩式垃圾车通过填装器实现生活垃圾的装填,通过密封装置实现对生活垃圾的密封压缩。
主要部件有:车厢、填装器、推板总成、推板油缸和取力器。
工作装置由取力器(或离合器)和动力输出轴及齿轮泵组成;填装器由填装器总成和取力器(或离合器)组成;推板总成由推板总成和取力器(或离合器)组成;推板总成由上箱体和下箱体组成,上体由左右两个箱门组成,下体由左右两个箱门组成。
—— 1 —1 —。
基于专用可编程控制器的垃圾车控制系统设计

目前 , 国 内垃 圾 压 缩 车 生 产 厂 家 主 要 通 过 引 进 技 术 进 行 消 化 吸收 , 或依 靠 模 仿 和 适 度 创新 , 成 自己 的 生 产 开 发 能 力 , 形 但 是 垃圾 车 的控 制 系 统 主 要 采 用 的 是 进 口可 编 程 控 制 器 ,使 得 控 制 系统 成 本 较 高 , 不 能 适 应 国 内的 生 产 研 发情 况 。 文 在 已有 且 本 技 术 的基 础 上 , 对 垃 圾 车 控 制 系统 成 本 较 高 的 问题 , 用 一 种 针 采 拥 有 自主知 识 产 权 的 专 用 可 编 程 控 制 器 代 替 原 有 的进 口可 编 程 控 制 器 , 新 设 计 垃 圾 车控 制 系 统 , 低 垃 圾 车 的 成 本 , 时 优 重 降 同 化 程序 , 高 系统 的可 靠 性 。 提 1 垃圾 车专 用 可 编 程 控 制 器 简 介 垃圾 车 专 用 可 编 程 控 制 器 是 针 对 垃 圾 车 应 用 工 况 而 分 析 与 设 计 的 ,硬 件 部 分 是 专 用 可 编 程 控 制 器 区别 于通 用 型 的核 心 部 分。 其输 出模 块 采 用 了两 种 方 案 , 种 是 目前 采 用 较 多 的 汽 车专 一 用 继 电器 方 案 , 由集 成 驱 动 电 路 驱 动 , 种 方 案 技 术 成 熟 , 成 这 但 本 较 高 ; 外 一 种 方 案 采 用 的是 大 功 率 MOS管 , 抗 冲击 电流 另 其
PLC s dpoed t si n r y t . t sgn, as i a t o de gn co tols sem Af de i i h be tsed n gar er t en e t o bag r c . e tu k Key wor : r ge tu ,pe alPL 。 dderdi am dsga ba rcks ci C l a agr
基于适时背压的压缩式垃圾车电液控制系统设计

21 0 0年 第 1期
液 压 与 气动
ห้องสมุดไป่ตู้3 9
排 出 : 垃圾运 输 到 目的地后 , 是 填料 器 与车箱 的锁
钩松 开 , 出板 将垃 圾推 出 , 排 同时举 在空 中的填料 器 进 行二 次动作 , 以清 除夹 在 刮 板 中的 垃 圾 , 出板 从 出 排 口处 向后 返 回 , 位 , 料 器 向 下 轻 缓 回位 , 复 填 自动 锁 钩将 填 料 器 与 车 箱 锁 闭 , 成 工 作 循 环 , 图 2 完 如 b
上 刮板提 升 , 垃圾刮 人车箱 进行压缩 , 将 并根据 需要进
行垃 圾 的计 量 , 至垃圾 装满 车箱 , 图 2 所示 。 直 如 a 这里垃 圾装载 压缩分 为过 程压缩 和垃圾装 载终 了
压缩 。过程 压缩采 用 适 时背 压压 缩 , 以刮板 刮人 垃 即 圾 上升 为主 动作用力 , 垃圾 刮入 车厢后 , 刮板 和排出 在 板 之 间形成作 用力 , 出板 上 的 背压 力是 伴 随 刮板 主 排
保 证 了装 载效 率 。垃圾 装 载终 了压 缩 , 排 出板 已经 是
退 到箱体 未端 , 无法再 向后 移动 , 时仍 向厢 内刮人 垃 此
圾 , 形成 的 压 缩 , 可 以 提 高 装 载 量 , 现 最 大 压 所 这 实
缩率 。
收 稿 日期 :090 - 2 0 -7 8 0
计, 实现 了基 于适 时背压垃圾 压 缩 , 形成 手动及 自动的 双重控制 , 高 了垃圾 车装 运效率 。 提 关键 词 : 缩式 垃圾 车 ; 时背压 ;L 压 适 PC
中图分类 号 : 4 9 6 T 3 文献标识码 : 文章 编号 :0 04 5 (0 0 O -0 80 U 6 . ;H17 B 10 -8 8 2 1 ) 10 3 -3
探究压缩式垃圾车控制系统设计

( 四) 衔接 工序 以及限位 保护 。 实现 限位保 护的一个 重要手 段就 是在控制 系 统 设计 过程 中加入 限位 开 关 , 通 过 加入 限位开 关将 能够 有效达 到 目的 。 设计 过
程 中可 以把 限位开 关设 置在 刮 板、 滑 板 的动作 纤维 出 。 这样 当刮 板及 滑板动 作
质量 , 在 今 后工 作过 程 中就要 加 强这 方面和 自动控 制两 种方 式 。 这 两 种控制 方 式的使 用环 境是 不一样 的 在 平常 工 作过程 中一 旦 出现粗 大物 件卡 滞这 种情 况的 时候就 需要 手动 操作 按钮 来达 到 目的 。 尾箱 内部 的垃 圾过 满 的时候 则 是通 过短 循环 操纵 来达 到 目的 。 ( 二) 紧 急停 止功能 的设 计 。 在实 际运 行过 程 中垃圾 车极有 可 能 出现意 外 情况, 一 旦 出现意外情 况之 后就要保 证垃 圾车 能够立刻 停止 一切动作 从而避 免 造 成人 身 伤害 。 为了达 到 这一 目的 , 在设 计 过程 中就 可 以设 计3 个紧 急停 止按
关还能够有效保证各个动作之间的衔接。 这对于维护控制系统的正常运行无疑
在 我国城 市人 口不 断增 多 , 城镇 化率 快速上 升 的今天 , 城 市垃 圾数 量急 剧
通 常利 用一 个按 钮就 能够 实现 自动 循环 , 手动 控制 则 是要 通过 手 动操 作来 实 现。 在 设计 过程 中就应 该按 照 以上要 求 夹进 行设 计
( 一 )确定 控制 方 式 。 对 于控 制方 式 , 垃 圾车 的 每个 环节 都 应该设 置有 手
本 上 可 以分 为 填装机 构 、 液压 系 统 、 厢体 、 电控系 统 以及卸 载机 构这 五部分 。 填 装机 构是 由刮 板 、 滑板 以及 各 自油缸 组成 的 。 滑板在 设 计过程 中主要是 要沿 着
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
分类号:TP272密级:公开U D C:单位代码:10424学位论文压缩式垃圾车控制系统设计栾晓梅申请学位级别:硕士学位专业名称:导航制导与控制指导教师姓名:高波职称:副教授山东科技大学二零一零年五月论文题目:压缩式垃圾车控制系统设计作者姓名:栾晓梅入学时间:2007年9月专业名称:导航制导与控制研究方向:现代控制理论及在导航中的应用指导教师:高波职称:副教授论文提交日期:2010年5月论文答辩日期:2010年6月授予学位日期:CONTROL SYSTEM DESIGN OF COMPRESSIONGARBAGE TRUCKA Dissertation submitted in fulfillment of the requirements for the degree ofMASTER OF PHILOSOPHYfromShandong University of Science and Technologyb yLuan XiaomeiSupervisor:Associate Professor Gao BoCollege of Information and Electrical EngineeringMay2010声明本人呈交给山东科技大学的这篇硕士学位论文,除了所列参考文献和所公认的文献外,全部是本人在导师指导下的研究成果。
该论文资料尚没有呈交于其它任何学术机关作鉴定。
硕士生签名:日期:AFFIRMATIONI declare that this dissertation,submitted in fulfillment of the requirements for the award of Master of Philosophy in Shandong University of Science and Technology,is wholly my own work unless referenced of acknowledge.The document has not been submitted for qualification at any other academic institute.Signature:Date:摘要后装压缩式垃圾车是城市垃圾车收集及转运的主要工具之一。
压缩式垃圾车通过控制系统控制滑板、刮板、排出板的动作实现垃圾的装载和卸载。
垃圾车的控制系统在经历了手动控制、继电器控制、微电脑控制之后,发展到现在的可编程控制。
目前国内的压缩式垃圾车生产企业大部分虽然已经采用可编程控制,但是其中一些关键部件包括控制器均依靠进口,以中集环境保护有限公司生产的压缩式垃圾为例,其车厢体所使用的钢材、液压系统中油缸、齿轮泵、高性能多控电磁阀及电气装置电子控制均是日本进口产品,价格高昂,使得产品很难适应中国市场。
针对以上问题,提出“垃圾车国产化”的理念。
本文从“控制系统国产化”出发,提出“压缩式垃圾车控制系统设计”的课题。
本论文的研究内容主要包括压缩式垃圾车电气原理设计、执行机构力学分析与仿真及控制系统程序设计三部分。
第一部分简单介绍了垃圾车的基本机构,分析各个机构的工作原理,并据此设计垃圾车作业流程图及控制系统电气原理,对系统所用主要元件进行选型。
第二部分首先对各个执行机构进行受力分析,计算执行机构运动过程中所受阻力,然后运用AMESim软件建立各个执行机构的液压系统模型,根据受力分析适当设置参数并仿真分析装载和卸载时间,以验证系统设计是否可行。
第三部分是根据电气原理及工作流程图,在SWOPC-FXGP/WIN-C环境下设计控制系统的PLC程序,通过实验室和现场的调试最终得到准确的控制系统程序。
本论文的研究,一方面初步实现了压缩式垃圾车控制系统的国产化,为压缩式垃圾车国产化做出应有的贡献,对我国其他行业控制系统国产化有一定的借鉴意义,推动可编程控制技术在环卫车辆中的应用及普及,同时对我国可编程控制技术的研究、发展及应用也具有重要的意义;另一方面为以后工业控制系统设计提供参考。
关键词:压缩式垃圾车,可编程控制器,液压系统仿真,AMESimABSTRACTCompression garbage truck is one of the main tools to collect and transport garbage in pression garbage truck realizes the function of load ing and unload ing by controlling glide-board、sweep-board and push-board.The control system has experienced manual control、relay control and microcomputer control system,now develops to PLC control system.At present,the control system of domestic garbage trucks have adopt PLC control,but some key parts include controllers need import.For example,steel、hydraulic system and electrical system adpotted by CIMC compression garbage truck are improted.The price is costliness,so the truck is difficult to adapt to chinese market.Based on the idea of loc alization of control system,we put forward the subject that is compression garbage truck control system design.The research contents of papers mainly include the design of electrical principle、dynamic simulation and analysis of actuator and program design.At first,basic structure is introduced and working principle are analyzed.According to the principle,working flowchart and electrical principle are designed,then components are selected.Secondly,doing force analysis for actuator,designing hydraulic system model by AMESim,setting up parameters and simulat to obtain the time of loading and unload ing.Finally,according to electrical principle and working flowchart,using SWOPC-FXGP/WIN-C to design PLC program of system.Improving the program by test in lab and field debugging.The research of papers,on the one hand,simply implements domestic production of control system and provides a basis for furture perfection,promote s development of programmable control technology on environmental sanitation field and provides helpful experiences for other industry control system.On the other hand,it can give reference for industrial control system in the future.Keywords:compression garbage truck,PLC,hydraulic system simulation,AMESim目录1绪论..................................................................................................................................................................................................................................................................................................................................................11.1引言...............................................................................................................................11.2课题的提出及研究意义...............................................................................................21.3垃圾车控制系统背景...................................................................................................21.4课题研究内容..............................................................................................................71.5本章小结......................................................................................................................82压缩式垃圾车电气原理设计 (10)102.1压缩式垃圾车结构....................................................................................................102.2垃圾车作业流程框图设计.........................................................................................122.3垃圾车控制系统电气原理设计................................................................................152.4元器件选型................................................................................................................202.5本章小结....................................................................................................................233执行机构的仿真与分析 (24)3.1AMESim 软件介绍 (24)3.2执行机构受力分析....................................................................................................303.3执行机构建模............................................................................................................363.4执行机构模型仿真分析............................................................................................393.5本章小结....................................................................................................................474垃圾车控制系统程序设计. (48)4.1SW0PC-FXGP/WIN-C 介绍......................................................................................484.2压缩式垃圾车控制系统程序编写............................................................................504.3本章小结....................................................................................................................565垃圾车控制系统的调试试验 (57)5.1实验室试验................................................................................................................575.2现场调试....................................................................................................................585.3本章小结....................................................................................................................596总结与展望 (60)致谢 (62)攻读硕士期间的发表的论文 (63)参考文献 (64)Contents1Introduction Introduction (1).11.1Forward…………………………….....………………………………...………………………….11.2Raising of Project and Signficiance of Study………….….…………...………………………….21.3Background of Grbage Truck Control System…………………………………………………....21.4Main Content of this Thesis..................................................................................71.5Summary.......................................................................................................82Electrical Principle Design of Control System System. (10).102.1Structure of Compression Garbage Truck…................................................................…………102.2Working Flowchart Design of Garbage Truck.............................................................................122.3Electrical Principle Design………………………………….……............……………………....152.4Components Selection.............................................................................................202.5Summary. (23)3Design of Information Collecting System..System (24)243.1Introduction of AMESim…………………..……………….……................…………………...243.2Force Analysis of Actuator………………………….…............................……………………....303.3Modeling of Executing Agency……………………......……………….………...………………363.4Simulation and Analysis of Actuator...........................................................................393.5Summary......................................................................................................................474Program Design of Control System System (48)484.1Introduction of SW0PC-FXGP/WIN-C……………………………...….…..…...……………….484.2Program Design of Control System...........................................................................504.3Summary (56)5Control System Test of Garbage Truck (57)..575.1Test in Lab (57)5.2Field Debugging......................................................................................................585.3Summary (59)6Conclusion and Prospect Prospect………………………………………………………………..................………………………………………………………..….………………………………..60..60Thanks Thanks (62)...62Main Work Achievement of the Author during Working on Master Pape Pape……........………………………..........63References References..........................................................................................................................................................................................................................................64. (64)1绪论1.1引言随着社会的发展和不断进步,城市化进程的加快,国民经济的发展和人民生活水平不断提高,垃圾数量日愈增加。