7位移的测量
合集下载
7 电容式传感器位移特性实验
传感器装于电容传感器实验模板,并将 传感器引线插头插入实验模板的插座中。 2、连线 接入±15V电源;将电容传感器实验模板的输出 端Vo1与数显单元Vi相接(插入主控箱Vi孔)Rw调 节到中间位置(方法:逆时针转到底再顺时转5圈)。 3、将主机箱上的电压表量程(显示选择)开关打到 2v档,合上主机箱电源开关,平移测微头改变电容 传感器的动极板位置使电压表显示0v ,再转动测微 头(同一个方向)5圈,记录此时的测微头读数和电压 表显示值为实验起点值。
二、圆柱形差动结构的电容式传感器
设圆筒的半径为r1,圆柱的半径为r2,圆柱的 长为x,则电容: 2πεx 2 c c x ln r1 r2 lnr1 r2
本实验电容器由两个圆筒和一个圆柱组成的。
2 2x C1、C2差动连接时 c ln r1 r2
C ∝x,配上测量电路,建立U∝ x,就能测量位移。 电容传感器的电容值非常微小,必须借助于测量电路, 将其转换成电压、电流、频率信号等电量来表示电容值的 大小。
电容式传感器的位移特性实验
实验目的
了解电容式传感器的结构及其特点。 了解电容式传感器测位移的原理
非电量 敏感元件
电参数 转换电路
电压或电流
实验原理
一、电容式传感器 1、定义 以电容为敏感原件,将机械位移量转换为电容量 变化的传感器称为电容式传感器。 2、分类 利用电容C=εs/d,通常将电容式传感器分为变 面积型、变介质型和变间隙型三种。 变面积型电容传感器中,平板结构对极距特别敏 感,测量精度受到影响,而圆柱形结构受极板径向变 化的影响很小,且理论上具有很好的线性关系,因而 成为实际中最常用的电容式传感器。
反方向每转动测微头1圈(△x=0.5mm) 读1次电压表读 数,记录10组数据),将数据填入表1并作出V—x曲线。 表1 电容传感器位置与输出电压值 X(mm) V(mV) 4、计算电容式传感器的系统灵敏度S和非线性误差δ。
二、圆柱形差动结构的电容式传感器
设圆筒的半径为r1,圆柱的半径为r2,圆柱的 长为x,则电容: 2πεx 2 c c x ln r1 r2 lnr1 r2
本实验电容器由两个圆筒和一个圆柱组成的。
2 2x C1、C2差动连接时 c ln r1 r2
C ∝x,配上测量电路,建立U∝ x,就能测量位移。 电容传感器的电容值非常微小,必须借助于测量电路, 将其转换成电压、电流、频率信号等电量来表示电容值的 大小。
电容式传感器的位移特性实验
实验目的
了解电容式传感器的结构及其特点。 了解电容式传感器测位移的原理
非电量 敏感元件
电参数 转换电路
电压或电流
实验原理
一、电容式传感器 1、定义 以电容为敏感原件,将机械位移量转换为电容量 变化的传感器称为电容式传感器。 2、分类 利用电容C=εs/d,通常将电容式传感器分为变 面积型、变介质型和变间隙型三种。 变面积型电容传感器中,平板结构对极距特别敏 感,测量精度受到影响,而圆柱形结构受极板径向变 化的影响很小,且理论上具有很好的线性关系,因而 成为实际中最常用的电容式传感器。
反方向每转动测微头1圈(△x=0.5mm) 读1次电压表读 数,记录10组数据),将数据填入表1并作出V—x曲线。 表1 电容传感器位置与输出电压值 X(mm) V(mV) 4、计算电容式传感器的系统灵敏度S和非线性误差δ。
结构力学课后答案第7章位移法
(d)
解:(1)确定基本未知量
两个位移未知量,各种M图如下
(2)位移法典型方程
(3)确定系数并解方程
代入,解得
(4)求最终弯矩图
(e)
解:(1)确定基本未知量
两个角位移未知量,各种M图如下
(2)位移法典型方程
(3)确定系数并解方程
代入,解得
(4)求最终弯矩图
7-7试分析以下结构内力的特点,并说明原因。若考虑杆件的轴向变形,结构内力有何变化?
(a)
解:(1)利用对称性得:
(2)由图可知:
可得:
(3)求最终弯矩图
(b)
解:(1)利用对称性,可得:
(2)由图可知,各系数分别为:
解得:
(3)求最终弯矩图如下
(c)
解:(1)在D下面加一支座,向上作用1个单位位移,由于BD杆会在压力作用下缩短,所以先分析上半部分,如下图。
D点向上作用1个单位,设B向上移动x个单位,则 ,得 个单位。
习题
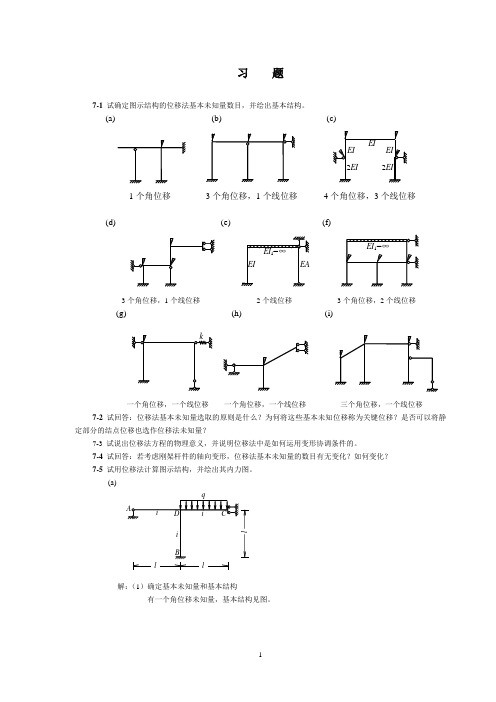
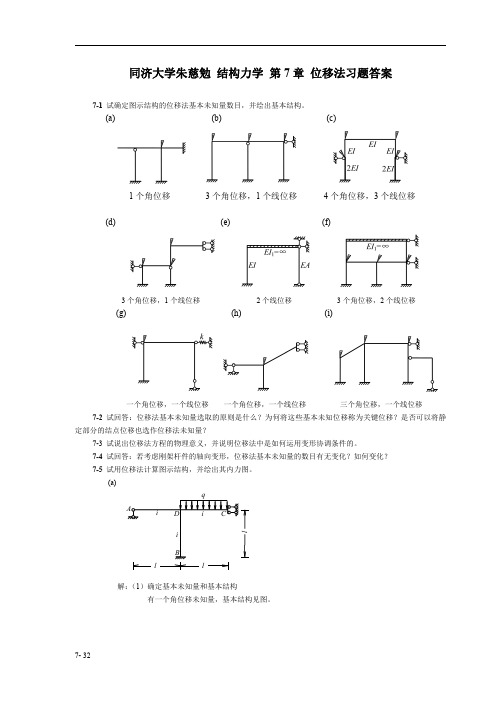
7-1试确定图示结构的位移法基本未知量数目,并绘出基本结构。
(a)(b) (c)
1个角位移3个角位移,1个线位移4个角位移,3个线位移
位移3个角位移,2个线位移
(g)(h)(i)
一个角位移,一个线位移一个角位移,一个线位移三个角位移,一个线位移
7-2试回答:位移法基本未知量选取的原则是什么?为何将这些基本未知位移称为关键位移?是否可以将静定部分的结点位移也选作位移法未知量?
(a) (b) (c)
(d) (e) (f)
7-8试计算图示具有牵连位移关系的结构,并绘出M图。
(a)
解:(1)画出 图
由图可得:
由图可知:
(2)列方程及解方程组
解:(1)确定基本未知量
两个位移未知量,各种M图如下
(2)位移法典型方程
(3)确定系数并解方程
代入,解得
(4)求最终弯矩图
(e)
解:(1)确定基本未知量
两个角位移未知量,各种M图如下
(2)位移法典型方程
(3)确定系数并解方程
代入,解得
(4)求最终弯矩图
7-7试分析以下结构内力的特点,并说明原因。若考虑杆件的轴向变形,结构内力有何变化?
(a)
解:(1)利用对称性得:
(2)由图可知:
可得:
(3)求最终弯矩图
(b)
解:(1)利用对称性,可得:
(2)由图可知,各系数分别为:
解得:
(3)求最终弯矩图如下
(c)
解:(1)在D下面加一支座,向上作用1个单位位移,由于BD杆会在压力作用下缩短,所以先分析上半部分,如下图。
D点向上作用1个单位,设B向上移动x个单位,则 ,得 个单位。
习题
7-1试确定图示结构的位移法基本未知量数目,并绘出基本结构。
(a)(b) (c)
1个角位移3个角位移,1个线位移4个角位移,3个线位移
位移3个角位移,2个线位移
(g)(h)(i)
一个角位移,一个线位移一个角位移,一个线位移三个角位移,一个线位移
7-2试回答:位移法基本未知量选取的原则是什么?为何将这些基本未知位移称为关键位移?是否可以将静定部分的结点位移也选作位移法未知量?
(a) (b) (c)
(d) (e) (f)
7-8试计算图示具有牵连位移关系的结构,并绘出M图。
(a)
解:(1)画出 图
由图可得:
由图可知:
(2)列方程及解方程组
结构力学-第7章-位移法习题答案
1 2
ql
1 12
ql 2
/ l
7 12
ql
由位移法方程得出:
r11Z1
R1 p
0
Z1
7ql 4 348EI
作出最终 M 图
7-9 试不经计算迅速画出图示结构的弯矩图形。
(a)
B
θA A
(b)
C B
yB
B′
A
C
题 7-9 图 7-10 试计算图示有剪力静定杆的刚架,并绘出 M 图。
13EI l
, r12
r21
3EI l2
r22
18EI l2
R1 p
1 16
ql 2 , R2 p
ql
代入,解得
Z1
66 3600
ql3 EI
,
Z2
211 3600
ql 4 EI
(4)求最终弯矩图
(e)
50kN·m
80kN·m 10kN·m 20kN
A 2EI B EI C
EI
(b)
B
3EI
C
EI
EI
A
D
Δ l
l
解:(1)求 M1, M 2 , M 3, M p 图。
(2)由图可知:
r11
16i, r12
r21
6i, r23
r32
6i l
, r22
16i, r33
24i l
R1 p
0, R2 p
7七章位移法

代回(2)MA 代回( )
1 ∴ = θA l 2
(4) )
∆
∆
M A = ( θ A )i M B = −( θ A )i
矩阵形式
4i M A M = 2i B Q 6i − l
2i 4i 6i − l
6i l 6i − l 12i − l −
θ A ⋅ θ B ∆
(刚度方程) 刚度方程)
§3 无侧移刚架
位移法中,刚架可分为 位移法中 刚架可分为 无侧移刚架 无侧移刚架 有侧移刚架 有侧移刚架
仅有结点转角θ 无侧移刚架 仅有结点转角 ,无 ∆ ——无侧移刚架 无侧移 有结点线位移 ∆ 每一刚结点有一θ ——有侧移刚架 有侧移刚架 有侧移
A
αi
Ni A P
A1
(基本未知量) ∆ 基本未知量)
2.结点 平衡 结点A平衡 结点
Σ N i sin α i = P
P
∆ ∆ l1
N i=
EAi sin 2 α i (基本方程) ∴( Σ )∆ = P 基本方程) li
∆=
=L
P EAi sin 2 α i Σ li
求出∆ 求出
3. ∆代回刚度方程 代回刚度方程
8.4
C
○ 4 16.8
M B 2 = 4i2θ B + 2i2θ C + M = 4θ B + 2θ C − 32 (-20.2) (- )
F M C 2 = 4i2θ C + 2i2θ B + M C 2 = 4θ C + 2θ B + 32 (25.2) )
D
10.1
8.4
结构力学 7.位移法
也称“先拆后搭”
§7-1 位移法的基本概念
2 位移法计算刚架的基本思路
(1)基本未知量——A 和。
(2)建立位移法基本方程 ■刚架拆成杆件,得出杆件的刚度方程。 ■杆件合成刚架,利用刚架平衡条件,建立位移法基本方程。
§7 – 2 等截面直杆的刚度方程 正负号规定
结点转角 A 、 B 、弦转角( = / l ) 和杆端弯矩M AB
0
0
6
5ql
3ql
3l / 8
8
8
9ql2 / 128
(↑) (↑)
2ql
ql
7
5
10
(↑) (↑)
8
9ql
11ql
40
40
(↑) (↑)
§7-2 等截面杆件的刚度方程
表1:载常数表(续)
序号 计算图及挠度图
弯矩图及固端弯矩
9
10
5FPl / 32
11
12
固端剪力
FQAB
FQBA
FPb(3l 2 b2 ) 2l 3
M AB
4i A
2i B
6i
l
M BA
2i A
4i B
6i
l
(1)B端为固定支座 B 0
FQ AB FQ BA
6i l
A
6i l
B
12i l2
(2)B端为铰支座 MBA 0
M AB
4i A
6i
l
M BA
2i A
6i
l
M AB
3i A
3i
l
§7-2 等截面杆件的刚度方程
M AB
24
25
26
27
固端剪力
§7-1 位移法的基本概念
2 位移法计算刚架的基本思路
(1)基本未知量——A 和。
(2)建立位移法基本方程 ■刚架拆成杆件,得出杆件的刚度方程。 ■杆件合成刚架,利用刚架平衡条件,建立位移法基本方程。
§7 – 2 等截面直杆的刚度方程 正负号规定
结点转角 A 、 B 、弦转角( = / l ) 和杆端弯矩M AB
0
0
6
5ql
3ql
3l / 8
8
8
9ql2 / 128
(↑) (↑)
2ql
ql
7
5
10
(↑) (↑)
8
9ql
11ql
40
40
(↑) (↑)
§7-2 等截面杆件的刚度方程
表1:载常数表(续)
序号 计算图及挠度图
弯矩图及固端弯矩
9
10
5FPl / 32
11
12
固端剪力
FQAB
FQBA
FPb(3l 2 b2 ) 2l 3
M AB
4i A
2i B
6i
l
M BA
2i A
4i B
6i
l
(1)B端为固定支座 B 0
FQ AB FQ BA
6i l
A
6i l
B
12i l2
(2)B端为铰支座 MBA 0
M AB
4i A
6i
l
M BA
2i A
6i
l
M AB
3i A
3i
l
§7-2 等截面杆件的刚度方程
M AB
24
25
26
27
固端剪力
第7章静定结构的位移计算

P
A
ql2/2
B
↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓
EI Pl/4
MP
q B
l/2
l/2
MP
A
l
m=1
l 3l/4
M
P=1
1/2
M
1 1 Pl 1 Pl 2 B l EI 2 4 2 16EI
1 1 ql 2 3 ql 4 B l l EI 3 2 4 8EI
⑥当图乘法的适用条件不满足时的处理方法: a)曲杆或 EI=EI(x)时,只能用积 分法求位移; 35 b)当 EI 分段为常数或 M、MP 均非直线时,应分段图乘再叠加。
§3—3计算结构位移的虚力原理
3. 虚拟状态的设置
在应用单位荷载法计算时,应据所求位移不同,设置相应 的虚拟力状态。
例如:
求△
A
实际状态
AH
求
A
A
1
A
虚拟状态
1
虚拟状态
求△
A
AB
1
B
求
A
AB
B
1
广义力与 广义位移
25
1
虚拟状态
虚拟状态
1
4、静定结构在荷载作用下的位移计算 当结构只受到荷载作用时,求K点沿指定方向的位移△KP, 此时没有支座位移,故式(7—15)为
3. 计算位移的目的 (1)为了校核结构的刚度。
(2)结构制造和施工的需要。
(3)为分析超静定结构打下基础。 另外,结构的稳定和动力计算也以位移为基础。
起拱高度
△
结构力学中计算位移的一般方法是以虚功原理为 基础的。本章先介绍变形体系的虚功原理,然后讨论 静定结构的位移计算。
结构力学-7 位移法2
4iB 153iB 90
B
6 7i
16.72
11.57
M AB 2i7 6i1 51.7 6k2N m
M BA 4i7 6i1 51.5 1k7N m M BC 3i7 6i91.5 1k7N m
3.21
M图 kNm
梁 MBC4B2C41.741.1524.8941.746.9kNm
..............................................
柱 MBE443B3B31.153.45kNm
MCF412C2C2(4.89)9.8kNm
MBC
q
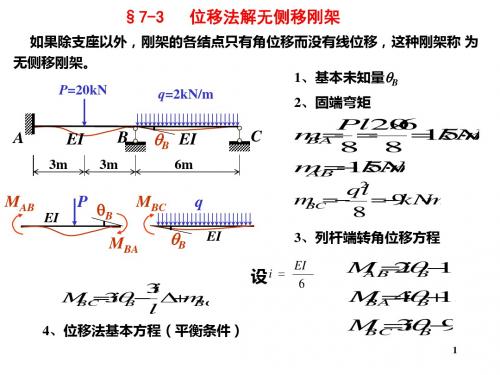
mBCq82l 9kNm
MBA
B EI
3、列杆பைடு நூலகம்转角位移方程
MBC3iB3limBC
设i
EI 6
4、位移法基本方程(平衡条件)
MAB2iB15 MBA4iB15
MBC3iB9
1
M超AB静EI定结P构分B 析M必B须C 满足q的三个条件:3、列杆端转角位移方程
2
C
D
1
C
D
A
B
7
线位移数也可以用几何构造分析方法确定。 将结构中所有刚结点和固定支座,代之以铰结点和铰支座,分析新体系的几 何构造性质,若为几何可变体系,则通过增加支座链杆使其变为无多余联系的 几何不变体系,所需增加的链杆数,即为原结构位移法计算时的线位移数。
1
4
0
8
BA EID
MEB
F
MCB
C
MCF
MCD
C
C MC 0
MFC
15
基本未知量为: C
第7章位移法

A A
MAB
B
MBA
QAB= QBA
θ=1
B
4i
1
2i
- 6i l
12i
l
- 6i
3i
l
- 6i
0
l2
A A
θ=1
B B
- 3i
3i l
l
2
1 θ=1
B
- 3i
i
l
0
A
-i
0
3、载常数:由跨中荷载引 起的固端力 Δ1=δ11X1 + Δ1P=0 1 l 2 2l l 3 11 EI 2 3 3 EI 1 1 ql 2 3l ql 4 1P - l EI 3 2 4 8 EI X1=-Δ1P / δ11 =3ql/8 各种单跨超静定梁在各 种荷载作用下的杆端力均可 按力法计算出来,这就制成 了载常数表
X1
1 2
X X X2 X X
11 1 12 2 1C 21 1 22 2 2C
用力法求解单跨超静定梁
θA
X1
A
θB
B
Δ
Δ
X2
几种不同远端支座的刚度方程 (1)远端为固定支座
M AB 4i A 2i B - 6i l (1) M BA 2i A 4i B - 6i l
根据两图结点平衡
可得附加约束反力
利用“载常数”可作 利用“形常数”可作 图示荷载弯矩图 图示单位弯矩图
典型方程法
以位移为基本未知量,先“固定”(不产 生任何位移) 考虑外因作用,由“载常数”得各杆受 力,作弯矩图。 令结点产生单位位移(无其他外因), 由“形常数” 得各杆受力,作弯矩图。 两者联合原结构无约束,应无附加约束 反力(平衡). 列方程可求位移。
MAB
B
MBA
QAB= QBA
θ=1
B
4i
1
2i
- 6i l
12i
l
- 6i
3i
l
- 6i
0
l2
A A
θ=1
B B
- 3i
3i l
l
2
1 θ=1
B
- 3i
i
l
0
A
-i
0
3、载常数:由跨中荷载引 起的固端力 Δ1=δ11X1 + Δ1P=0 1 l 2 2l l 3 11 EI 2 3 3 EI 1 1 ql 2 3l ql 4 1P - l EI 3 2 4 8 EI X1=-Δ1P / δ11 =3ql/8 各种单跨超静定梁在各 种荷载作用下的杆端力均可 按力法计算出来,这就制成 了载常数表
X1
1 2
X X X2 X X
11 1 12 2 1C 21 1 22 2 2C
用力法求解单跨超静定梁
θA
X1
A
θB
B
Δ
Δ
X2
几种不同远端支座的刚度方程 (1)远端为固定支座
M AB 4i A 2i B - 6i l (1) M BA 2i A 4i B - 6i l
根据两图结点平衡
可得附加约束反力
利用“载常数”可作 利用“形常数”可作 图示荷载弯矩图 图示单位弯矩图
典型方程法
以位移为基本未知量,先“固定”(不产 生任何位移) 考虑外因作用,由“载常数”得各杆受 力,作弯矩图。 令结点产生单位位移(无其他外因), 由“形常数” 得各杆受力,作弯矩图。 两者联合原结构无约束,应无附加约束 反力(平衡). 列方程可求位移。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2018/10/24
2018/10/24
电子油门的核心是位移传感器。位移 传感器的输出控制一只微型电机,电机可 驱动节气门开度,即可控制油门的大小。 电位计式位移传感器为电子油门控制 器中的常用传感器。那么电位计式位移传 感器的工作原理是什么?其结构、特点、 适用场所如何?这就是我们本课题的任务 目标。
2018/10/24
4. 测量方法 线绕式电位计是通过电阻百分比来分配 外加电源的电压,因此输出要注意阻抗的匹 配。 线绕电位器具有精度高、性能稳定、线 性好等优点,但分辨率低、耐磨性差、寿命 短。因此,可以使用一些非线绕式电位器。
2018/10/24
三、非线绕式电位器
按照材料的不同,除了线绕式电位器外还 有以下三类常见的电位器: 1、膜式电位器 膜式电位器通常分碳膜电位器和金属膜电 位器。碳膜电位器是在绝缘骨架表面涂一层均 匀电阻液,烘干聚合后形成电阻膜。优点是分 辨率高、耐磨性好、工艺简单、低成本,但接 触电阻大。金属膜电位器是在玻璃等绝缘基体 上喷涂一层铂铑、铂铜合金金属膜制成。这种 电位器温度系数小,适合高温工作,但功率小 较、耐磨性差、阻值小。
二、线绕电位器传感器的输出特性
1. 阶梯特性 当电刷在变阻器的线圈上移动时,电位器的阻 值随电刷从一圈移动到另一圈,输出电压U0不连续 变化,而是跳跃式地变化。电刷每移动一匝线圈使 输出电压产生一次跳跃,移动n匝,则使输出电压 产生n次电压阶跃。 当电刷从n一1匝移至n匝时,电刷瞬间使两相 邻匝线短接,使每一个电压阶跃中产生一次小阶跃 ,所以线绕电位器输出是阶梯特性。工程上总是将 真实输出特性理想化为阶梯状特性曲线或近似为直 线。
2018/10/24
当监测到油门踏板高度位置有变化,会 瞬间将此信息送往ECU,ECU对该信息和其 它系统传来的数据信息进行运算处理,计算 出一个控制信号,通过线路送到伺服电动机 继电器,伺服电动机驱动节气门执行机构。 由于电子油门系统是通过ECU来调整节 气门的,因此电子油门系统可以设置各种功 能来改善驾驶的安全性、舒适性、油耗及尾 气排放质量。
2018/10/24
2018/10/24
2. 电压分辨率 线绕电位器的电压分辨率,是在电刷 行程内电位计输出电压阶梯的最大值与最 大输出电压之比的百分数。对于具有理想 阶梯特性的线绕电位计,其理论的电压分 辨率为
由上式可以看出,线绕电位器的匝数 越多,其分辨率越高。
2018/10/24
3. 测量误差 阶梯特性曲线围绕理论特性直线上下波 动,产生的偏差称为阶梯误差。电位器的阶 梯误差ej通常用理想阶梯特性曲线对理论特 性曲线的最大偏差值与最大输出电压值之比 的百分数表示。电位器阶梯误差为
2018/10/24
2. 导电塑料电位器 又称有机实心电位器。采用塑料和导电 材料(石墨、金属合金粉末等)混合模压而 成。特点是分辨率高、使用寿命长、旋转力 矩小、功率大。缺点是接触电阻大、耐热、 耐湿性能差。
2018/10/24
3. 光电电位器 光电电位器是非接触电位器,采用光束 代替电刷。光束在电阻带、光电导层上移动 时,光电导层受到光束激发,使电阻带和集 电带导通,在负载电阻两端便有电压输出。 光电电位器特点是阻值范围宽(500Ω~ 15MΩ)、无磨损、寿命长、分辨率高。缺点 是不能输出大电流,测量电路复杂。
2018/10/24
(1)相敏检波电路 相敏检波电路的形式较多。这种电路要求 比较电压Ek与差动变压器的输出电压Es具有 相同频率、相同相位,必须接入移相电路。相 敏检波电路输出直流电压信号,输出电压的极 性能反映铁心位移的方向,即铁心位置从零点 向上、下移动,对应输出电压符号为负极性或 正极性。而且还可以消除残余电压。
2018/10/24
课题二 差动变压器式位移传感器
[任务导入]
有的机械零件尺寸需要精确测量,并根 据测量误差进行分拣。轴的外径测量就是其 中一种,需要根据形状精度自动检测。
在自动检测系统中, 往往要用到差动变压器式 位移传感器进行测量,测 量精度较高,检测范围一 般是0~100mm。
2018/10/24
2018/10/24
(2)差动整流电路 差动整流电路又分为全波电流输出、半波 电流输出、全波电压输出和半波电压输出。这 种电路的原理是把差动变压器两个次级电压分 别整流后,以它们的差作为输出,这样次级线 圈电压的相位和零点残余电压都不必考虑。
2018/10/24
2. 零位电压的补偿 采用补偿线路可以减小零点残余电压。补 偿方法是在输出端接一可调电位器Ro。改变电 位器电刷的位置,可使两只次级线圈的输出电 压的大小和相位发生改变,从而使零位电压为 最小值。这种方法可补偿零位电压中基波正交 分量。如果在输出端再并联一只电容器C,就 可以有效地补偿零位电压的高次谐波分量。
模块七 位移的测量
位移测量从被测量来的角度可分为线位 移测量和角位移测量;从测量参数特性的角 度可分为静态位移测量和动态位移测量。许 多动态参数,如力、扭矩、速度、加速度等 都是以位移测量为基础的。 自动化生产与工程自动控制中经常需要 测量位移。测量时应当根据不同的测量对象 选择测量点、测量方向和测量系统,其中位 移传感器精度起重要作用。
2018/10/24
差动变压器工作在理想情况下,等效电路 如下图。 U1为初级线圈激励电压;M1、M2分 别为初级、次线圈间的互感,L1、R1为初级线 圈的电感和有效电阻;L21、L22、R21、R22分别 为两个次级线圈的电感有交电阻。
2018/10/24
当初级线圈加上交流电压U1时,在次级 线圈分别产生感应电压E21和E22,则输出电 压E2=E21-E22。 当两个次级线圈完全一致,铁芯位于中 间时,输出电压为0。 主、次绕组间的耦合会随衔铁的移动而 变化。当铁芯向上运动时,互感M1大,M2 小,E21> E22 ;当铁心向下运动时,互感 M1小,M2大,E21< E22 。随着铁心上下移 动,输出电压E2发生变化,其大小与铁心的 轴向位移成比例,其相位反映铁心的运动方 向。这样输出电压E2就可以反映位移变化。
2018/10/24
[相关知识]
差动变压器是利 用电磁感应原理进行 测量的。它从原理上 讲是一个变压器,利 用线圈的互感作用把 被测位移量转换为感 应电势的变化。由于 这种传感器常常做成 差动的形式,所以称 为差动变压器。
2018/10/24
一、差动变压器式位移传感器原理
差动变压器式传感器是由一个可动铁芯 1、初级线圈2和次级线圈3和4组成的变压器。 次级线圈3和4反极性串联,接成差动形式。
二、差动变压器式位移传感器结构类型与基本特性 1. 螺管型差动变压器 螺管型差动变压器由线圈绕组、可动 衔铁和导磁外壳组成。绕组由初、次级线 圈和骨架组成。
2018/10/24
2. Ⅱ型差动变压器 对称的Ⅱ型铁心上各有次级线圈绕组,中 间衔铁为平板型。这种差动变压器的灵敏度较 高,且初级线圈Q值很高时,输出特性曲线如 图所示。其灵敏度与初始间隙成正比,δ 0越 大,灵敏度越小。
2018/10/24
◆ 知识点
¤ 了解位移传感器的基本工作原理 ¤ 掌握位移传感器的基本测量方法 ◆ 技能点 ¤ 掌握位移传感器的一般测量方法
2018/10/24
[相关知识]
电位器式传感器是将非电量如力、位移、 速度和加速度等的变化量变换成有一定关系的 电阻值的变化,再通过对电阻值的测量达到对 上述非电量测量的目的。 电位计(器)式电阻传感器又分为线绕式和 非线绕式两种,它们主要用于非电量变化较大 的测量场合,如线位移、角、 线绕电位器结构和工作原理
2018/10/24
若线绕电位器的绕线的截面积均匀,则R变 化均匀 (线性)。U1为工作电压,U0为负载电阻 RL两端的输出电压。X为线绕电位器电刷移动的 长度,L为其总长度,对应于电刷移动量X的电 阻值R x为 输出电压为
2018/10/24
在机械零件的几 何形状精度检测时, 我们常常选择差动变 压器式位移传感器。 差动变压器式位 移传感器的工作原理 是什么?其结构、特 点如何?这就是我们 本课题的任务目标。
2018/10/24
◆ 知识点
¤ 了解差动变压器式传感器的工作原理 ¤ 了解差动变压器式传感器的性能特点 及其适用场合 ◆ 技能点 ¤ 掌握差动变压器式传感器的使用、测 量方法
2018/10/24
4 频率特性 差动变压器的激磁频率一般从400 Hz到 l0kHz较为适当,应大于衔铁运动频率1 0倍。 频率太低时差动变压器的灵敏度显著降低,温 度误差和频率误差增加。但频率太高,铁损和 耦合电容等的影响也增加,前述的理想差动变 压器的假定条件就不能成立。
2018/10/24
单一线圈的感 应电势E21或E22 与位移s成非线性 ,而差动形式输出 电压E2则与铁心 的位移成线性。 E2的实线表示理想的输出特性,而虚线表 示实际的输出特性。由于差动变压器上下不对 称、铁心位置等因素,当铁心在中间位置时, 输出不为零。E0称为零点残余电压。 零点残余电压的存在,使传感器的输出特 性在零点附近不灵敏,给测量带来误差,此值 的大小是衡量差动变压器性能好坏的重要指标 2018/10/24 。
2018/10/24
四、差动变压器式位移传感器基本特性
差动变压器式传感器的特性取决于差动 变压器的特性,包括灵敏度、零点电压、线 性范围、相位、频率特性、温度特性、吸合 力等。 1 灵敏度 差动变压器在单位电压激磁下,铁心移 动一单位距离时的输出电压即为灵敏度,其 单位为V/mm· V。一般差动变压器的灵敏度 大于5 0mV/mm· V。提高线圈的Q值,选择 较高的激磁频率,增大铁心直径,提高激磁 电压都可以提高差动变压器的灵敏度。
2018/10/24
模块七 位移的测量
课题一 课题二 课题三 课题四 位移传感器 差动变压器式位移传感器 电涡流式位移传感器 光栅式位移传感器
2018/10/24
课题一 位移传感器
2018/10/24
电子油门的核心是位移传感器。位移 传感器的输出控制一只微型电机,电机可 驱动节气门开度,即可控制油门的大小。 电位计式位移传感器为电子油门控制 器中的常用传感器。那么电位计式位移传 感器的工作原理是什么?其结构、特点、 适用场所如何?这就是我们本课题的任务 目标。
2018/10/24
4. 测量方法 线绕式电位计是通过电阻百分比来分配 外加电源的电压,因此输出要注意阻抗的匹 配。 线绕电位器具有精度高、性能稳定、线 性好等优点,但分辨率低、耐磨性差、寿命 短。因此,可以使用一些非线绕式电位器。
2018/10/24
三、非线绕式电位器
按照材料的不同,除了线绕式电位器外还 有以下三类常见的电位器: 1、膜式电位器 膜式电位器通常分碳膜电位器和金属膜电 位器。碳膜电位器是在绝缘骨架表面涂一层均 匀电阻液,烘干聚合后形成电阻膜。优点是分 辨率高、耐磨性好、工艺简单、低成本,但接 触电阻大。金属膜电位器是在玻璃等绝缘基体 上喷涂一层铂铑、铂铜合金金属膜制成。这种 电位器温度系数小,适合高温工作,但功率小 较、耐磨性差、阻值小。
二、线绕电位器传感器的输出特性
1. 阶梯特性 当电刷在变阻器的线圈上移动时,电位器的阻 值随电刷从一圈移动到另一圈,输出电压U0不连续 变化,而是跳跃式地变化。电刷每移动一匝线圈使 输出电压产生一次跳跃,移动n匝,则使输出电压 产生n次电压阶跃。 当电刷从n一1匝移至n匝时,电刷瞬间使两相 邻匝线短接,使每一个电压阶跃中产生一次小阶跃 ,所以线绕电位器输出是阶梯特性。工程上总是将 真实输出特性理想化为阶梯状特性曲线或近似为直 线。
2018/10/24
当监测到油门踏板高度位置有变化,会 瞬间将此信息送往ECU,ECU对该信息和其 它系统传来的数据信息进行运算处理,计算 出一个控制信号,通过线路送到伺服电动机 继电器,伺服电动机驱动节气门执行机构。 由于电子油门系统是通过ECU来调整节 气门的,因此电子油门系统可以设置各种功 能来改善驾驶的安全性、舒适性、油耗及尾 气排放质量。
2018/10/24
2018/10/24
2. 电压分辨率 线绕电位器的电压分辨率,是在电刷 行程内电位计输出电压阶梯的最大值与最 大输出电压之比的百分数。对于具有理想 阶梯特性的线绕电位计,其理论的电压分 辨率为
由上式可以看出,线绕电位器的匝数 越多,其分辨率越高。
2018/10/24
3. 测量误差 阶梯特性曲线围绕理论特性直线上下波 动,产生的偏差称为阶梯误差。电位器的阶 梯误差ej通常用理想阶梯特性曲线对理论特 性曲线的最大偏差值与最大输出电压值之比 的百分数表示。电位器阶梯误差为
2018/10/24
2. 导电塑料电位器 又称有机实心电位器。采用塑料和导电 材料(石墨、金属合金粉末等)混合模压而 成。特点是分辨率高、使用寿命长、旋转力 矩小、功率大。缺点是接触电阻大、耐热、 耐湿性能差。
2018/10/24
3. 光电电位器 光电电位器是非接触电位器,采用光束 代替电刷。光束在电阻带、光电导层上移动 时,光电导层受到光束激发,使电阻带和集 电带导通,在负载电阻两端便有电压输出。 光电电位器特点是阻值范围宽(500Ω~ 15MΩ)、无磨损、寿命长、分辨率高。缺点 是不能输出大电流,测量电路复杂。
2018/10/24
(1)相敏检波电路 相敏检波电路的形式较多。这种电路要求 比较电压Ek与差动变压器的输出电压Es具有 相同频率、相同相位,必须接入移相电路。相 敏检波电路输出直流电压信号,输出电压的极 性能反映铁心位移的方向,即铁心位置从零点 向上、下移动,对应输出电压符号为负极性或 正极性。而且还可以消除残余电压。
2018/10/24
课题二 差动变压器式位移传感器
[任务导入]
有的机械零件尺寸需要精确测量,并根 据测量误差进行分拣。轴的外径测量就是其 中一种,需要根据形状精度自动检测。
在自动检测系统中, 往往要用到差动变压器式 位移传感器进行测量,测 量精度较高,检测范围一 般是0~100mm。
2018/10/24
2018/10/24
(2)差动整流电路 差动整流电路又分为全波电流输出、半波 电流输出、全波电压输出和半波电压输出。这 种电路的原理是把差动变压器两个次级电压分 别整流后,以它们的差作为输出,这样次级线 圈电压的相位和零点残余电压都不必考虑。
2018/10/24
2. 零位电压的补偿 采用补偿线路可以减小零点残余电压。补 偿方法是在输出端接一可调电位器Ro。改变电 位器电刷的位置,可使两只次级线圈的输出电 压的大小和相位发生改变,从而使零位电压为 最小值。这种方法可补偿零位电压中基波正交 分量。如果在输出端再并联一只电容器C,就 可以有效地补偿零位电压的高次谐波分量。
模块七 位移的测量
位移测量从被测量来的角度可分为线位 移测量和角位移测量;从测量参数特性的角 度可分为静态位移测量和动态位移测量。许 多动态参数,如力、扭矩、速度、加速度等 都是以位移测量为基础的。 自动化生产与工程自动控制中经常需要 测量位移。测量时应当根据不同的测量对象 选择测量点、测量方向和测量系统,其中位 移传感器精度起重要作用。
2018/10/24
差动变压器工作在理想情况下,等效电路 如下图。 U1为初级线圈激励电压;M1、M2分 别为初级、次线圈间的互感,L1、R1为初级线 圈的电感和有效电阻;L21、L22、R21、R22分别 为两个次级线圈的电感有交电阻。
2018/10/24
当初级线圈加上交流电压U1时,在次级 线圈分别产生感应电压E21和E22,则输出电 压E2=E21-E22。 当两个次级线圈完全一致,铁芯位于中 间时,输出电压为0。 主、次绕组间的耦合会随衔铁的移动而 变化。当铁芯向上运动时,互感M1大,M2 小,E21> E22 ;当铁心向下运动时,互感 M1小,M2大,E21< E22 。随着铁心上下移 动,输出电压E2发生变化,其大小与铁心的 轴向位移成比例,其相位反映铁心的运动方 向。这样输出电压E2就可以反映位移变化。
2018/10/24
[相关知识]
差动变压器是利 用电磁感应原理进行 测量的。它从原理上 讲是一个变压器,利 用线圈的互感作用把 被测位移量转换为感 应电势的变化。由于 这种传感器常常做成 差动的形式,所以称 为差动变压器。
2018/10/24
一、差动变压器式位移传感器原理
差动变压器式传感器是由一个可动铁芯 1、初级线圈2和次级线圈3和4组成的变压器。 次级线圈3和4反极性串联,接成差动形式。
二、差动变压器式位移传感器结构类型与基本特性 1. 螺管型差动变压器 螺管型差动变压器由线圈绕组、可动 衔铁和导磁外壳组成。绕组由初、次级线 圈和骨架组成。
2018/10/24
2. Ⅱ型差动变压器 对称的Ⅱ型铁心上各有次级线圈绕组,中 间衔铁为平板型。这种差动变压器的灵敏度较 高,且初级线圈Q值很高时,输出特性曲线如 图所示。其灵敏度与初始间隙成正比,δ 0越 大,灵敏度越小。
2018/10/24
◆ 知识点
¤ 了解位移传感器的基本工作原理 ¤ 掌握位移传感器的基本测量方法 ◆ 技能点 ¤ 掌握位移传感器的一般测量方法
2018/10/24
[相关知识]
电位器式传感器是将非电量如力、位移、 速度和加速度等的变化量变换成有一定关系的 电阻值的变化,再通过对电阻值的测量达到对 上述非电量测量的目的。 电位计(器)式电阻传感器又分为线绕式和 非线绕式两种,它们主要用于非电量变化较大 的测量场合,如线位移、角、 线绕电位器结构和工作原理
2018/10/24
若线绕电位器的绕线的截面积均匀,则R变 化均匀 (线性)。U1为工作电压,U0为负载电阻 RL两端的输出电压。X为线绕电位器电刷移动的 长度,L为其总长度,对应于电刷移动量X的电 阻值R x为 输出电压为
2018/10/24
在机械零件的几 何形状精度检测时, 我们常常选择差动变 压器式位移传感器。 差动变压器式位 移传感器的工作原理 是什么?其结构、特 点如何?这就是我们 本课题的任务目标。
2018/10/24
◆ 知识点
¤ 了解差动变压器式传感器的工作原理 ¤ 了解差动变压器式传感器的性能特点 及其适用场合 ◆ 技能点 ¤ 掌握差动变压器式传感器的使用、测 量方法
2018/10/24
4 频率特性 差动变压器的激磁频率一般从400 Hz到 l0kHz较为适当,应大于衔铁运动频率1 0倍。 频率太低时差动变压器的灵敏度显著降低,温 度误差和频率误差增加。但频率太高,铁损和 耦合电容等的影响也增加,前述的理想差动变 压器的假定条件就不能成立。
2018/10/24
单一线圈的感 应电势E21或E22 与位移s成非线性 ,而差动形式输出 电压E2则与铁心 的位移成线性。 E2的实线表示理想的输出特性,而虚线表 示实际的输出特性。由于差动变压器上下不对 称、铁心位置等因素,当铁心在中间位置时, 输出不为零。E0称为零点残余电压。 零点残余电压的存在,使传感器的输出特 性在零点附近不灵敏,给测量带来误差,此值 的大小是衡量差动变压器性能好坏的重要指标 2018/10/24 。
2018/10/24
四、差动变压器式位移传感器基本特性
差动变压器式传感器的特性取决于差动 变压器的特性,包括灵敏度、零点电压、线 性范围、相位、频率特性、温度特性、吸合 力等。 1 灵敏度 差动变压器在单位电压激磁下,铁心移 动一单位距离时的输出电压即为灵敏度,其 单位为V/mm· V。一般差动变压器的灵敏度 大于5 0mV/mm· V。提高线圈的Q值,选择 较高的激磁频率,增大铁心直径,提高激磁 电压都可以提高差动变压器的灵敏度。
2018/10/24
模块七 位移的测量
课题一 课题二 课题三 课题四 位移传感器 差动变压器式位移传感器 电涡流式位移传感器 光栅式位移传感器
2018/10/24
课题一 位移传感器