基于HDevelop的形状匹配算法参数的优化研究
基于改进SURF算子的高低分辨率图像配准方法

Ab s t r a c t : Du e t o t h e l a r g e r e s o l u t i o n d i f f e r e n c e b e t we e n t h e t h r e e — d i me n s i o n a l l a s e r i ma g i n g s e n s o r a n d v i s i b l e i ma — g i n g s e n s o r , mi s ma t c h i n g f e a t u r e p o i n t s a r e n u me r o u s . I n o r d e r t o s o l v e t h i s p r o b l e m, a r e g i s t r a t i o n me t h o d o f h i g h - l o w r e s o l u t i o n i ma g e s b a s e d o n i mp r o v e d S U RF i s p r o p o s e d . F i r s t l y, l o w— r e s o l u t i o n i ma g e i s p r o c e s s d e t h r o u g h b i l i n e a r i n —
基于图像轮廓的匹配算法的研究与应用

基于图像轮廓的匹配算法的研究与应用图像轮廓是图像中物体的边界线条,它包含了物体的形状和结构信息。
基于图像轮廓的匹配算法在计算机视觉领域有着广泛的研究和应用。
本文将探讨该算法的研究进展以及在实际应用中的一些应用案例。
首先,基于图像轮廓的匹配算法主要包括两个步骤:特征提取和匹配。
特征提取是指从图像中提取出轮廓特征,常用的方法有边缘检测算法(如Canny算法)和轮廓提取算法(如Sobel算法)。
匹配是指将提取到的轮廓特征与数据库中的轮廓进行比对,找到最佳匹配结果。
常用的匹配方法有欧氏距离匹配和形状上下文匹配等。
在研究方面,基于图像轮廓的匹配算法已经取得了一些重要的进展。
例如,研究人员提出了基于形状上下文的匹配算法,该算法可以在形状有较大变化的情况下也能进行准确的匹配。
此外,还有一些基于深度学习的图像轮廓匹配算法,通过使用深度神经网络对轮廓进行学习和提取,可以得到更加准确的匹配结果。
在应用方面,基于图像轮廓的匹配算法有着广泛的应用场景。
例如,在目标检测中,可以利用该算法对目标的轮廓进行匹配,从而实现目标的自动识别和定位。
此外,在工业领域中,可以利用该算法对产品的轮廓进行匹配,实现产品的质量检测和分类。
除此之外,基于图像轮廓的匹配算法还可以应用于图像检索、图像重建等领域。
例如,在图像检索中,可以利用该算法对图像库中的图像进行轮廓匹配,从而实现更加准确和高效的图像检索。
在图像重建中,可以利用该算法对缺失的轮廓进行补全,从而实现图像的完整重建。
综上所述,基于图像轮廓的匹配算法在计算机视觉领域具有重要的研究价值和广泛的应用前景。
虽然该算法在一些复杂场景下仍然存在一定的挑战,但通过不断的研究和改进,相信会有更多的突破和创新,进一步推动该算法在实际应用中的发展和应用。
Halcon标定文件资料地生成及标定板规格
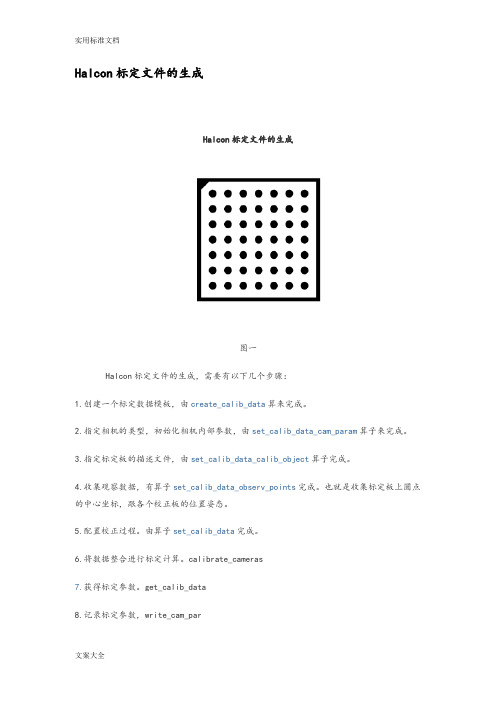
Halcon标定文件的生成Halcon标定文件的生成图一Halcon标定文件的生成,需要有以下几个步骤:1.创建一个标定数据模板,由create_calib_data算来完成。
2.指定相机的类型,初始化相机内部参数,由set_calib_data_cam_param算子来完成。
3.指定标定板的描述文件,由set_calib_data_calib_object算子完成。
4.收集观察数据,有算子set_calib_data_observ_points完成。
也就是收集标定板上圆点的中心坐标,跟各个校正板的位置姿态。
5.配置校正过程。
由算子set_calib_data完成。
6.将数据整合进行标定计算。
calibrate_cameras7.获得标定参数。
get_calib_data8.记录标定参数,write_cam_parStartCamPar :=[0.016, 0, 0.0000074, 0.0000074, 326, 247, 652,494]解释一下这个数组的意思。
面阵相机有14或18个参数(根据想相机的畸变模式),对于线阵相机有17个参数。
这些参数可以分开为内部相机参数、外部相机参数。
面阵相机(division模式):Focus(焦距):远焦镜头镜头焦距的长度Kappa:扭曲系数Sx,Sy:两像素间距Cx,Cy:中心点坐标Whith,Height:图像的宽高面阵相机(polynomia模式):Focus(焦距):远焦镜头镜头焦距的长度K1, K2, K3, P1,P2:扭曲系数Sx,Sy:两像素间距Cx,Cy:中心点坐标Whith,Height:图像的宽高线阵相机不做具体介绍Halcon标定板规格2011-12-23 12:56 68人阅读评论(1) 收藏举报图一:30*30 规格的标定板的规格黑色圆点行数: 7黑色圆点列数: 7外边框长度: 30mm*30mm内边框长度: 28.125mm*28.125mm 即:黑色边框线宽为一个圆点半径(0.9375)黑色圆点半径: 0.9375mm圆点中心间距: 3.75mm裁剪宽度: 30.75mm*30.75mm 即:由黑色边框向外延伸0.375mm 边角:由黑色外边框向内缩进一个中心边距的长度40*40 规格的标定板的规格黑色圆点行数: 7黑色圆点列数: 7外边框长度: 40mm*40mm内边框长度: 37.5mm*37.5mm 即:黑色边框线宽为一个圆点半径(0.125)黑色圆点半径: 0.125mm圆点中心间距: 5mm裁剪宽度: 21mm*21mm 即:由黑色边框向外延伸0.5mm边角:由黑色外边框向内缩进一个中心边距的长度50*50 规格的标定板的规格黑色圆点行数: 7黑色圆点列数: 7外边框长度: 50mm*50mm内边框长度: 46.875mm*46.875mm 即:黑色边框线宽为一个圆点半径(1.5625)黑色圆点半径: 1.5625mm圆点中心间距: 6.25mm裁剪宽度: 51.25mm*51.25mm 即:由黑色边框向外延伸0.625mm 边角:由黑色外边框向内缩进一个中心边距的长度60*60 规格的标定板的规格黑色圆点行数: 7黑色圆点列数: 7外边框长度: 60mm*60mm内边框长度: 56.25mm*56.25mm 即:黑色边框线宽为一个圆点半径(1.875)黑色圆点半径: 1.875mm圆点中心间距: 7.5mm裁剪宽度: 61.5mm*61.5mm 即:由黑色边框向外延伸0.75mm边角:由黑色外边框向内缩进一个中心边距的长度Halcon如何制作标定板分类:Halcon 2011-12-23 12:51 151人阅读评论(2) 收藏举报图1上图即为我自行制作的标定板的图样。
模板匹配方法总结

很早就想总结一下前段时间学习HALCON的心得,但由于其他的事情总是抽不岀时间。
去年有过一段时间的集中学习,做了许多的练习和实验,并对基于HDevelop的形状匹配算法的参数优化进行了研究,写了一篇《基于HDevelop的形状匹配算法参数的优化研究》文章,总结了在形状匹配过程中哪些参数影响到模板的搜索和匹配,又如何来协调这些参数来加快匹配过程,提高匹配的精度,这篇paper放到了中国论文在线了,需要可以去下载。
德国MVTec公司开发的HALCON机器视觉开发软件,提供了许多的功能,在这里我主要学习和研究了其中的形状匹配的算法和流程。
HDevelop开发环境中提供的匹配的方法主要有三种,即Component-Based、Gray-Value-Based、Shape-Based,分别是基于组件(或成分、元素)的匹配,基于灰度值的匹配和基于形状的匹配。
这三种匹配的方法各具特点,分别适用于不同的图像特征,但都有创建模板和寻找模板的相同过程。
这三种方法里面,我主要就第三种-基于形状的匹配,做了许多的实验,因此也做了基于形状匹配的物体识别,基于形状匹配的视频对象分割和基于形状匹配的视频对象跟踪这些研究,从中取得较好的效果,简化了用其他工具,比如VC++来开发的过程。
在VC下往往针对不同的图像格式,就会弄的很头疼,更不用说编写图像特征提取、模板建立和搜寻模板的代码呢,我想其中间过程会很复杂,效果也不一定会显著。
下面我就具体地谈谈基于HALCON的形状匹配算法的研究和心得总结。
1. Shape-Based matchi ng 的基本流程HALCON提供的基于形状匹配的算法主要是针对感兴趣的小区域来建立模板,对整个图像建立模板也可以,但这样除非是对象在整个图像中所占比例很大,比如像视频会议中人体上半身这样的图像,我在后面的视频对象跟踪实验中就是针对整个图像的,这往往也是要牺牲匹配速度的,这个后面再讲。
基本流程是这样的,如下所示:⑴首先确定岀ROI的矩形区域,这里只需要确定矩形的左上点和右下点的坐标即可,gen_recta ngle1()这个函数就会帮助你生成一个矩形,利用area_ce nter()找到这个矩形的中心;⑵然后需要从图像中获取这个矩形区域的图像,reduce_domain()会得到这个ROI ;这之后就可以对这个矩形建立模板,而在建立模板之前,可以先对这个区域进行一些处理,方便以后的建模,比如阈值分割,数学形态学的一些处理等等;⑶ 接下来就可以利用create_shape_model()来创建模板了,这个函数有许多参数,其中金字塔的级数由Numlevels指定,值越大则找到物体的时间越少,AngleStart和AngleExtent决定可能的旋转范围,AngleStep指定角度范围搜索的步长;这里需要提醒的是,在任何情况下,模板应适合主内存,搜索时间会缩短。
图像匹配经典算法及其改进方法研究
Abstract: Matching methods of image matching algorithm is composed of: direct use of grey degree of original image, use the feature of physical shape and use the advanced feature of the image. Classical matching algorithms contain ABS algorithm, normalized cross-correlation algorithm, moment matching method and the method based on the feature point of image. Improved methods refer to SSDA algorithm, pyramidal layered searching method and so on.
1.2 利用图像的物理形状特征进行匹配
利用图像的物理特征,如边缘、骨架线条、角 点等进行匹配,需要相关计算的像素点数目有明显 减少,并具有更强的适应能力。这种算法对细微的 干扰不太敏感,而是依赖于提取的图像特征,其关
键是寻找易于识别和区分的特征,通过基于特征集 间的相似性度量来找到模板在图像中的匹配位置。
xy
m 01 = ∑ ∑ yf ( x , y )
xy
f(x,y) 归一化:
η pq
=
u pq u r 00
(8)
式中,r=(p+q)/2+1,p+q=2,3,…。
为加速模板匹配过程,可采用 2 步模板匹配策
略。首先,使用零阶矩算子进行粗匹配,获得可能
基于ShapeContext的形状匹配方法的改进

首先对边界提取算法进行改进 ,满足人脸的轮 廓边界的复杂性要求. 先采用扩散滤波技术进行预 处理操作 ,模糊图像的细节 ,使获得的图像边缘更
( College of Computer Science and Technology , Donghua University , Shanghai 201620 , China)
Abstract : Traditio nal Shape Co ntext is used in simple shape matching. Focusing o n t he face shape matching and intelligent video surveillance applicatio ns , an imp roved Shape Co ntext met ho d is p ropo sed , and use Shape Co ntext in t he face shape matching. Ba sed o n Shape Co ntext , t his met ho d is a 2D invariance shape matching algo rit hm , integrated wit h imp roved co nto ur ext ractio n algo rit hm , p ret reat ment ( diff usio n filter algo rit hm) and no rmalizatio n met ho d , w hich make it suitable fo r bot h simple shape and face shape matching. This met ho d can be used in intelligent video surveillance system ro bustly and effectively. Key words : intelligent video surveillance ; shape matching ; face matching ; shape co ntext ; diff usio n filter
改进HD距离和遗传算法的图像匹配研究
【 s a t Ami a h polm o ta Abt c】 i n t e rbe s f ht thn pit o i -eo t n m g i i cl o ee n ad h r g t ma ig ons r hg rsl i i ae s f ut dt mie n te c f h uo di t r
像及 复杂场合 的匹配精度要求 , 而限制了 SH" 子应 从 I 算
用 】 。在模板 匹配方法 中 , 图像 匹配 测度 H ud r( D asof H )
策 略的并 行遗传算 法 ( ut s a g aa e G nt 1 M l—t t yP r l eecA . i re ll i
grh M P A)在并行遗传算法上采 用不 同的算法策 oi m, S G , t
距离 , 能有 效进行图像搜索 , 因具 有计算 快捷 、 不需点对 点精确匹配和对局部非相似变形不敏感等优点而得到广
泛应 用 , 但经 典 HD 离采用 的最大最 小距离对 出格噪 距
略, 以增加群 体 的多样性及 算法 的稳健性 , 对概 率加权
l oi m tk s h a i t o aall rc sig o h -tae p r ll e ei g rh ag r h t a e te bly f p r e po esn f mu isrtg i l y aa e g n t a o tm t o t z Ha s of itn e fr l cl i o pi e n d r dsa c mi o i rvn h mac ig s e d h x ei na rs l h w ta h பைடு நூலகம் rp sd ag rh h s o u tes frn ie ott n a ge mp o ig te thn p e .T e e p r me tl eut s o h tte p oe oi m a rb s s o os ,r ai n l s o l t n o a d bo k n mp o e te mac ig s e d a d te c mp t g s e d e et ey n lc ,a d i rv h thn p e n h o ui p e f ci l. n v
3-hdevelop

放大率 数据类型
通道数
红, 绿, 蓝戒 灰度值
当前位置坐标
HDevelop 区域特征
特征名称 特征值 可视化快速评估
区域基本特征
形状特征 灰度值特征
用鼠标点击相应的区域
提纲
什么是HDevelop HDevelop图形组件 算子选择 写一个程序
HDevelop 算子菜单
菜单项
子菜单 算子
查找 下一个/所有出现的算子 并给出标志线 替换 下一个/所有 出现的算子
数据类型
图像 Images Region XLD 控制 Handles
Real
String Integer
数据类型: 右键菜单
在图像变量上右键单击鼠标 显示:在图像窗口中显示图像 (类似双击) 清除窗口后再显示
Tuple 处理 每个算子可以使用单个值戒者tuple值 control 和 iconic 都可以使用tuple 灵活的类型处理 整型和浮点型自劢转换 大多数算子支持多种像素类型 自劢内存管理 每个需要的内存(就像一个图像矩阵) 在一个算子内申请 根据所使用的编程环境自劢释放数据 容易学会算子的命名的规则
提纲
什么是HDevelop HDevelop图形组件 算子选择 写一个程序
HDevelop介绍
HDevelop是开始视觉处理算法的一个很好的工具,类似于VC、VB、 Delphi等编译环境。
它有自己的交互式界面,可以编译和测试视觉处理算法,可以方便查看
处理结果。 可以导出算法代码
HDevelop 工具栏
帮劣
轮廓线 特征检测 直方图
缩放窗口
显示参数 重置/中止程序执行 停止程序执行 (F9) 控制程序执行 (F5)-(F8)