MRAS参考模型自适应控制
自适应控制的方法
自适应控制的方法自适应控制是一种用于调节系统行为以适应外部变化的控制方法。
它能够根据系统当前状态和外部环境的变化自动调整控制参数,以保持系统性能在可接受的范围内。
在工业控制、汽车控制、航空航天等领域都有广泛的应用。
自适应控制的基本原理是根据反馈信号对系统进行实时调整,以便让系统可以适应外部环境的变化。
它是一种闭环控制方法,即通过不断地观测系统的输出,并与期望的输出进行比较,然后对控制参数进行调整,以确保系统达到期望的性能。
相比于传统的固定参数控制方法,自适应控制可以更好地适应系统和环境的变化,使得系统更加稳定和可靠。
自适应控制的方法有很多种类,其中最常见的包括模型参考自适应控制、自抗扰控制、模糊自适应控制和神经网络自适应控制等。
这些方法各有特点,但基本原理基本相同,即通过观测系统的输出和环境的变化,对控制参数进行动态调整,以保持系统的稳定性和性能。
模型参考自适应控制是一种基于系统模型的控制方法,它通过对系统模型的估计,来实时调整控制参数。
它可以适应系统的非线性和时变特性,对于一些复杂的控制系统来说是比较有效的。
自抗扰控制是一种抑制外部扰动对系统影响的控制方法,它通过观测和预测扰动,来进行实时调整控制参数,以抵消外部扰动对系统的影响。
模糊自适应控制是一种基于模糊逻辑的控制方法,它通过对系统的模糊化处理,来实现对控制参数的自适应调整。
它可以适应系统的复杂性和不确定性,对于一些复杂的非线性系统来说是比较有效的。
神经网络自适应控制是一种基于神经网络的控制方法,它通过对系统的学习和记忆,来进行实时调整控制参数,使系统可以适应外部环境的变化。
它可以适应系统的非线性和时变特性,对于一些复杂的控制系统来说是比较有效的。
自适应控制方法的选择,取决于系统的特性和需要达到的性能,不同的方法都有其适用的范围和条件。
在现实应用中,还可以根据系统的具体情况,结合多种方法来实现自适应控制,以获得更好的效果。
在实际应用中,自适应控制可以提高系统的鲁棒性和稳定性,对于一些复杂、非线性、时变的系统来说,尤其有着重要的意义。
现代控制理论中的模型预测控制和自适应控制
现代控制理论中的模型预测控制和自适应控制在现代控制理论中,模型预测控制和自适应控制是两种广泛应用的控制方法。
这两种控制方法各有优劣,适用于不同的控制场景。
本文将分别介绍模型预测控制和自适应控制的基本原理、应用范围和实现方法。
模型预测控制模型预测控制(MPC)是一种基于数学模型预测未来状态的控制方法。
MPC通过建立系统的数学模型,预测系统未来的状态,在控制循环中不断地更新模型和控制算法,实现对系统的精确控制。
MPC的核心思想是将控制问题转化为优化问题,通过最优化算法求解出最优的控制策略。
MPC的应用范围十分广泛,特别适用于需要对系统动态响应进行精确控制的场合,如过程控制、机械控制、化工控制等。
MPC 在控制精度、鲁棒性、适应性等方面都具有优异的表现,是目前工业控制和自动化领域的主流控制方法之一。
MPC的实现方法一般可分为两种,一种是基于离线计算的MPC,一种是基于在线计算的MPC。
离线计算的MPC是指在系统运行之前,先通过离线计算得到优化控制策略,然后将其存储到控制器中,控制器根据当前状态和存储的控制策略进行控制。
在线计算的MPC则是指在系统运行时,通过当前状态和模型预测计算器实时地优化控制策略,并将其传输到控制器中进行实时控制。
自适应控制自适应控制是指根据系统实时变化的动态特性,自动地调整控制算法和参数,以实现对系统的精确控制。
自适应控制可以适应系统动态响应的变化,提高控制精度和鲁棒性,是现代控制理论中的重要分支之一。
自适应控制的应用范围广泛,特别适用于对控制要求较高的复杂系统,如机械控制、电力控制、化工控制等。
自适应控制可以通过软件和硬件两种实现方式,软件实现是通过控制算法和参数的在线调整来实现,硬件实现则是通过控制器内部的调节器、传感器等硬件来实现。
自适应控制的实现方法一般可分为两种,一种是基于模型参考自适应控制(MRAC),一种是模型无关自适应控制(MIMO)。
MRAC是指通过建立系统的数学模型,基于参考模型的输出来进行控制的方法,适用于系统具有良好动态特性的场合;MIMO则是指在不需要建立系统数学模型的情况下,通过控制器内部的自适应算法来实现控制的方法,适用于系统非线性和时变性较强的场合。
DCS系统的自适应控制与优化算法
DCS系统的自适应控制与优化算法自适应控制与优化算法在DCS系统中的应用DCS系统(Distributed Control System,分布式控制系统)是一种将计算机技术与自动化控制相结合的先进控制系统。
它通过采集和处理大量的现场数据,实现对工业过程的监控与控制。
为了提高DCS系统的控制性能,自适应控制与优化算法被广泛应用于DCS系统中。
一、自适应控制算法自适应控制算法是一种根据系统实时状态和变化情况来调整控制策略的算法。
在DCS系统中,自适应控制算法能够根据工艺过程的特性和目标性能要求,动态调整控制器参数,以实现控制过程的稳定性和鲁棒性。
1. 模型参考自适应控制算法(Model Reference Adaptive Control,MRAC)MRAC算法通过将系统的参考模型与控制器的输出进行比较,来实现对控制器参数的自适应调整。
该算法可以自动地对变化的系统进行适应,提高系统的跟踪能力和鲁棒性。
2. 递归自适应控制算法(Recursive Adaptive Control,RAC)RAC算法在每个采样周期内,通过递归算法对控制器参数进行在线调整。
该算法能够实时地对系统参数进行估计,并根据估计结果进行控制参数的更新,以应对不确定性和变化性。
二、优化算法优化算法在DCS系统中的应用主要是针对系统的性能优化和能源消耗的降低。
通过对系统的优化设计,可以实现DCS系统的高效运行和节能降耗。
1. 遗传算法(Genetic Algorithm,GA)遗传算法是一种通过模拟生物进化过程来寻找最优解的优化算法。
在DCS系统中,可以利用遗传算法来搜索最优的控制策略和参数,以实现系统的性能优化。
2. 粒子群优化算法(Particle Swarm Optimization,PSO)PSO算法是一种模拟鸟群觅食行为的优化算法。
在DCS系统中,可以利用PSO算法来寻找最优的控制策略和参数,以实现系统的性能优化和能源消耗的降低。
新型模型参考自适应的PMSM_无差拍电流预测控制

第27卷㊀第9期2023年9月㊀电㊀机㊀与㊀控㊀制㊀学㊀报Electri c ㊀Machines ㊀and ㊀Control㊀Vol.27No.9Sep.2023㊀㊀㊀㊀㊀㊀新型模型参考自适应的PMSM 无差拍电流预测控制张懿,㊀徐斌,㊀魏海峰,㊀李垣江,㊀刘维亭(江苏科技大学电子信息学院,江苏镇江212100)摘㊀要:永磁同步电机(PMSM )的无差拍电流预测控制(DPCC )对参数失配非常敏感㊂在实际应用环境中,由于某些因素的影响,电机参数会失配,严重时会导致PMSM 运行故障㊂为了减小对DPCC 的影响,提出一种基于新型模型参考自适应系统(MRAS )的参数分步辨识方法㊂首先,获得定子电阻和定子电感的参数,并将其作为已知量来辨识转子磁链㊂等待参数稳定之后,再将辨识结果作为已知量用于辨识定子电感和定子电阻㊂最后,将辨识出的参数代入DPCC 进行改进㊂实验结果表明,该方法可以解决模型欠秩的问题,并且可以抑制电机参数失配对DPCC 的影响,提高动态跟踪性和鲁棒性,具有一定的工程实际意义㊂关键词:无差拍电流预测控制;参数分步辨识;动态跟踪性;鲁棒性;永磁同步电机DOI :10.15938/j.emc.2023.09.017中图分类号:TM351文献标志码:A文章编号:1007-449X(2023)09-0157-11㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀收稿日期:2022-05-25基金项目:国家自然科学基金(51977101);江苏省省重点研发计划产业前瞻性与共性关键技术重点项目(BE2018007)作者简介:张㊀懿(1982 ),女,博士,教授,研究方向为电机控制;徐㊀斌(1998 ),男,硕士研究生,研究方向为电机控制;魏海峰(1981 ),男,博士,教授,研究方向为电机控制;李垣江(1981 ),男,博士,副教授,研究方向为电机控制以及复杂控制系统;刘维亭(1966 ),男,博士,教授,研究方向为电机控制㊂通信作者:魏海峰New model reference adaptive deadbeat predictive currentcontrol of PMSMZHANG Yi,㊀XU Bin,㊀WEI Haifeng,㊀LI Yuanjiang,㊀LIU Weiting(School of Electronics and Information,Jiangsu University of Science and Technology,Zhenjiang 212100,China)Abstract :The deadbeat predictive current control (DPCC)of permanent magnet synchronous motor (PMSM)is quite sensitive to parameter mismatch.In the environment of practical application,parameter mismatch could occur in the motor due to certain factors,and serious occasions would result in the opera-tion failure of PMSM.In order to weaken the influence on the DPCC,a parameter stepwise identification method based on the new model reference adaptive system (MRAS)was proposed.Firstly,the parame-ters of stator resistance and stator inductance were acquired and used as the known quantity to identify ro-tor flux.Then the identification result was used as the known quantity to identify stator inductance and stator resistance after the parameters are stable.And finally,the identified parameters were substituted into the DPCC for improvement.The experiment result shows that the method can solve the under-rank problem of the model and can suppress the influence of motor parameter mismatch on the DPCC to im-prove the dynamic tracking and robustness.The method has a certain practical engineering significance.Keywords :deadbeat predictive current control;parameter stepwise identification;dynamic tracking;ro-bustness;permanent magnet synchronous motor0㊀引㊀言永磁同步电机(permanent magnet synchronous motor,PMSM)具有体积小㊁质量轻㊁功率高等特点,因此广泛普及于民用㊁航天及军事等领域㊂当前,电流环控制策略有:电流预测控制[1-4]㊁电流滞环控制[5-8]㊁PI电流控制[9-12]和自抗扰控制[13-14]等㊂截至目前,应用最广的是传统PI电流环控制,由于其结构简单以及低通滤波的特性,导致超调量较大,适用于滞后性和惯性比较大的场合㊂电流滞环控制的算法比较复杂,并且其开关频率受负载的影响较大,而自抗扰控制研究目前还未达到一定的深度,因此算法实现难度大㊂为了满足高精度领域的需求,无差拍电流预测控制可以让系统的电流环得到更快的响应输出,同时电流的纹波小,控制算法也容易实现,但由于无差拍电流预测控制受电机参数的影响较大,当电机参数不准确或者工作环境改变,都会导致交直轴电流出现偏差,随着转速的增大,交直轴电流偏差就会越大㊂文献[15]设计了基于Lagrange 插值的无差拍电流预测控制(deadbeat predictive current control,DPCC)算法,虽然提高了鲁棒性,但也降低了一定的动态效果㊂文献[16]提出了一种新的功率滑模趋近律,缩短系统的收敛时间,然后建立了一种改进功率滑模趋近律的非齐次扰动观测器,保证电流误差收敛至0,最后建立一种新型定子电流和扰动观测器的改进型DPCC㊂模型参数扰动的问题基本得到解决,但是计算复杂,对计算机硬件要求高㊂文献[17]在无差拍电流预测控制中引入鲁棒电流预测算法,提高了系统电流环的动态性能和稳态精度,但是研究对象只针对电感参数失配,在实际应用中,电机运行受限不只是电感参数的问题㊂文献[18]通过加入模糊前馈控制器来降低参数的敏感度,从而提高鲁棒性,但是目前只停留在仿真阶段,没有考虑实际应用环境中的电机控制,缺乏实验依据㊂文献[19]提出了一种非线性扩展状态观测器和权重因子相结合来改进DPCC的方法,估计的电流扰动和电压扰动可以分别用来校正电流参考值和输出电压,以此提高系统的鲁棒性,但设计过程较为复杂㊂文献[20]为了实现让电流误差为0,需要提供补偿给反馈电流,将引入电流预测的补偿因子来修正电压,以此提高系统的鲁棒性,但是该方法比较影响系统的动态性能㊂为了解决由于参数失配导致无差拍电流预测控制动态跟踪性和鲁棒性差的问题,本文提出一种基于新型模型参考自适应系统的参数分步辨识法㊂首先获取定子电感和定子电阻参数,将其作为已知量来辨识转子磁链㊂等到转子磁链参数稳定后,再针对定子电阻和定子电感进行辨识㊂其次,将辨识出的参数代入无差拍电流预测控制进行改进,可以有效解决参数辨识模型存在的欠秩问题,增加电机参数辨识的精确度,同时可以抑制参数失配对无差拍电流控制系统的影响,从而提高系统的动态跟踪性和鲁棒性㊂最后通过实验验证该方法的有效性㊂1㊀无差拍电流预测控制1.1㊀永磁同步电机数学模型搭建为了简化设计,因此假设PMSM满足以下理想情况:1)忽略电机的铁心饱和;2)不计涡流和磁滞损耗;3)电机电流为对称的三相正弦波㊂基于以上理想情况,永磁同步电机在d-q轴下的定子电压方程为:u d=R s i d+L dd i dd t-ωe L q i q;u q=R s i q+L qd i qd t+ωeψf+ωe L d i d㊂üþýïïïï(1)式中:u d㊁u q和i d㊁i q分别是d-q轴下的定子电压和定子电流分量;R s是定子电阻;L d㊁L q是d-q轴电感;ωe是转子电角速度;ψf是转子磁链㊂1.2㊀无差拍电流预测控制的实现采用表贴式永磁同步电机,利用其d-q轴电感相等的特性,即L d=L q=L㊂将d-q轴电流作为状态分量,得到的电流状态方程数学模型为:d i dd t=u dL-R s i dL+ωe i q;d i qd t=u qL-R s i qL-ωe i d-ωeψfL㊂üþýïïïï(2)由于电流的采样时间短,则本文采用一阶泰勒公式将电流状态方程进行离散化,即离散化的数学模型近似为:d i dd t=i d(k+1)T s-i d(k)T s;d i qd t=i q(k+1)T s-i q(k)T s㊂üþýïïïï(3)式中:i d(k)㊁i q(k)是第k时刻的d-q轴电流变量值;i d(k+1)㊁i q(k+1)是第k+1时刻的d-q轴电流变量值;T s是电流的采样时间值㊂通过将式(3)851电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀代入式(2),可以计算出无差拍电流预测控制中第k +1时刻的离散化d -q 轴电流变量值控制方程为i d (k +1)i q (k +1)éëêêùûúú=M (k )i d (k )i q (k )éëêêùûúú+N u d (k )u q (k )éëêêùûúú+T (k )㊂(4)式中:M (k )=L -T s R sLωe (k )T s -ωe (k )T s L -T s R s Léëêêêêùûúúúú;N =T s L00T s L éëêêêêùûúúúú;T (k )=0-T sLψf ωe (k )()㊂无差拍电流预测控制的实际意义是为了实现控制系统下一刻的输出电流能够跟上给定电流,则需要将控制系统的给定电流值作为下一个时刻的输出电流值,因此,需要根据离散方程和d -q 轴的给定电流值计算出控制电压,以此来实现下一时刻的输出电流经过单独的电流采样周期后能够跟上给定电流㊂通过式(4)可以计算出无差拍电流预测控制中所需的d -q 轴电压控制方程为u d (k )u q (k )éëêêùûúú=N -1-M (k )i d (k )i q (k )éëêêùûúú+{i d (k +1)i q (k +1)éëêêùûúú-T (k )}㊂(5)图1为传统无差拍电流预测控制系统结构框图㊂为了实现永磁同步电机的电流无差拍,用第k时刻的d -q 轴给定电流值i ∗d (k )和i ∗q (k )去替换第k +1时刻的d -q 轴电流变量值i d (k +1)和i q (k +1),因此通过式(5)可以计算出无差拍电流预测控制中所需的d -q 轴电压控制方程为u d (k )u q (k )éëêêùûúú=N -1-M (k )i d (k )i q (k )éëêêùûúú+i ∗d (k )i ∗q (k )éëêêùûúú-T (k ){}㊂(6)在实际进行永磁同步电机控制过程中,基于电机参数准确的情况下,则在第k +1时刻的d -q 轴输出电流值将会达到给定电流值㊂若电机参数失配的情况下,则第k +1时刻的d -q 轴输出电流值将会和给定电流值出现误差㊂根据式(4)可以计算出无差拍电流预测控制中第k +1时刻的离散化d -q 轴实际电流变量值控制方程为i d (k +1)i q (k +1)éëêêùûúú=M 0(k )i d (k )i q (k )éëêêùûúú+N 0u d (k )u q (k )éëêêùûúú+T 0(k )㊂(7)式中:M 0(k )=L 0-T s R s0L 0ωe (k )T s -ωe (k )T s L 0-T s R s0L 0éëêêêêùûúúúú;N 0=T s L 000T s L 0éëêêêêùûúúúú;T 0(k )=-T sL 0ψf0ωe (k )()㊂其中:R s0是定子电阻实际值;L 0是定子电感实际值;ψf0是转子磁链实际值㊂图1㊀无差拍电流预测控制系统结构框图Fig.1㊀Structural block diagram of traditional DPCCsystem将式(6)代入式(7)可得:i d (k +1)=T s ΔR -ΔL L 0i d (k )+LL 0i ∗d(k )-ΔLL 0T s ωe (k )i q (k );i q (k +1)=T s ΔR -ΔL L 0i q (k )+LL 0i ∗q(k )+ΔLL 0T s ωe (k )i d (k )+T s ωe (k )ΔψL㊂üþýïïïïïïïïïï(8)式中:ΔR =R s -R s0;ΔL =L -L 0;Δψ=ψf -ψf0㊂当系统达到稳定时刻,可从上式看出,定子电阻和定子电感均会影响d -q 轴电流,而转子磁链只会影响q 轴电流㊂由此可见,电机参数的精度偏差会影响整个电机电流环控制的性能,因此,增加电机参951第9期张㊀懿等:新型模型参考自适应的PMSM 无差拍电流预测控制数辨识的精度就可以抑制参数失配对电机的性能影响,使得整个控制系统运行具有稳定性㊂1.3㊀无差拍电流预测控制的稳定性基于T s的开关周期很小,因此将式(8)进行Z 变换,可以得出d-q轴给定电流和实际电流的离散域闭环传递函数为i dq(z) i∗dq(z)=LL0zz-1-L L()㊂(9)通过式(9)可以看出,该系统的极点为z=1-LL0㊂由离散稳定性条件可知,系统想要稳定,极点应处于Z平面内的单位圆内,即|z|<1,则无差拍电流预测控制的稳定界限为0<L<2L0㊂(10)由式(10)可知,要使系统稳定,则定子电感值需在该范围内,假如超出该范围,则系统是不稳定的㊂2㊀新型模型参考自适应的参数分步辨识思想2.1㊀传统模型参考自适应系统的参数辨识图2为传统模型参考自适应系统(model refer-ence adaptive system,MRAS)结构框图,由参考模型㊁可调模型和自适应律共同组成㊂该系统主要实际意义在于求得一种能够实时进行动态调整的反馈自适应律,使得当前系统的闭环控制性能可以和参考模型的性能相一致,因此构造出两个模型,其中一个将不含待辨识参数的电流状态方程作为永磁同步电机参考模型,而将含待辨识参数的电流状态方程作为永磁同步电机可调模型,将这两个模型输出量作差,当得出的输出误差送入自适应律进行实时动态调整至0时,则可调模型就等效于参考模型,而待辨识参数的估算值就等效于参数的实际值㊂本文结合Popov超稳定性理论设计自适应律,该设计方法可以降低计算量,同时可以保证待辨识参数的稳定性㊂2.2㊀新型模型参考自适应系统的参数分步辨识如式(2)所示,永磁同步电机数学模型的电流状态方程是2维的,在需要辨识电机3个参数的情况下,会存在欠秩情况,从而导致电机参数的失配,影响电机的控制性能㊂因此,本文采用参数分步辨识的方法,其系统结构框图如图3所示㊂图2㊀传统模型参考自适应系统结构框图Fig.2㊀Structural block diagram of traditional MRASsystem图3㊀参数分步辨识系统结构框图Fig.3㊀Structural block diagram of parameter stepwise identification system具体的辨识过程如下:1)固定定子电阻和定子电感,以上电机参数均可从电机参数铭牌上获取;2)将不含待辨识参数的电流状态方程作为永磁同步电机参考模型,将步骤1获取到的定子电阻和定子电感参数值作为已知量代入进电流状态方程中,设计出含待辨识参数的可调模型㊂由于转子磁链只和q轴电流状态方程相关,所以只需采用q轴电流状态方程即可㊂此时只有一个未知量,方程存在唯一解,从而设计自适应律来辨识转子磁链; 3)待转子磁链辨识稳定后,将已知的转子磁链代入第二个可调模型中,用来辨识定子电阻和定子电感,此时只有2个未知量,针对2维的电流状态方程存在唯一解,再设计自适应律来辨识定子电阻和定子电感㊂061电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀3㊀参数分步辨识实现3.1㊀转子磁链的辨识实现由于转子磁链只和q轴的电流方程有关,通过式(2)可得q轴的电流状态方程为d i q d t=u qL-R s i qL-ωe i d-ωeψfL㊂(11)对应的可调模型为d i^q d t=u qL-R s i^qL-ωe i d-ωeψ^fL㊂(12)由式(11)~式(12)可得一阶误差系统为d e qd t=De q-F㊂(13)式中:e q=i q-i^q;D=-R s L;F=ωe L(ψf-ψ^f)㊂为了满足该系统的全局稳定,根据Popov超稳定性理论可知,需要满足以下条件:∀t1>0,η(0,t1)=ʏt10e T F d tȡ-γ2㊂(14)式中γ2是有限正数㊂将e q和F代入式(14)可得:∀t1>0,η(0,t1)=ʏt10e T qωe L(ψf-ψ^f)d tȡ-γ2㊂(15)这里将转子磁链的自适应律设置为比例积分形式,具体形式如下:ψ^f=ʏt0g1(τ)dτ+g2(t)+ψ^f(0)㊂(16)式中ψ^f(0)为所辨识参数的初始值㊂将式(16)代入式(15)得ʏt10e qωe L[ψf-ʏt10g1(τ)dτ-g2(t)-ψ^f(0)]d tȡ-γ2㊂(17)将式(17)拆分成积分项和比例项,即:ʏt10e qωe L[ψf-ʏt0g1(τ)dτ-ψ^f(0)]d tȡ-γ21;ʏt10-e qωe L g2(t)d tȡ-γ22㊂üþýïïïï(18)式中γ21和γ22是有限正数,且γ2=γ21+γ22㊂显然式(18)成立即式(17)同样成立,令:fᶄ(t)=e qωe L;k i f(t)=ψf-ʏt0g1(τ)dτ-ψ^f(0); k p fᶄ(t)=-g2(t)㊂üþýïïïïïï(19)将式(19)代入式(18)可得:ʏt10k i f(t)fᶄ(t)d tȡ-γ21;ʏt10k p[fᶄ(t)]2d tȡ-γ22㊂üþýïïïï(20)式中k i和k p均大于0㊂由式(20)进行变换可得:ʏt10k i f(t)fᶄ(t)d t=k i2[f2(t1)-f2(0)]ȡ0;ʏt10k p[fᶄ(t)]2d tȡ0㊂üþýïïïï(21)由式(21)可知,式(18)成立,因此式(17)成立㊂即该系统全局稳定,则有:g1(τ)=-k i e qωe L;g2(t)=-k p e qωe L㊂üþýïïïï(22)因此,将式(22)代入式(16)并化简,转子磁链的自适应律为ψ^f=-k is+k p()e qωe L+ψ^f(0)㊂(23) 3.2㊀定子电阻和定子电感的辨识实现当转子磁链辨识稳定后,对定子电阻和定子电感进行辨识,通过式(2)可得参考模型为dd ti di qéëêêùûúú=-R s Lωe-ωe-R s Léëêêêêùûúúúúi di qéëêêùûúú+1L001Léëêêêêùûúúúúu du qéëêêùûúú+-ωeψf Léëêêêùûúúú㊂(24)分别令可调参数:a=R sL;b=1L㊂电流状态方程式(24)可化简为p I=AI+BU+C㊂(25)式中:I=i di qéëêêùûúú;U=u d uqéëêêùûúú;A=-aωe-ωe-aéëêêùûúú;B= b00b[];C=0-ωeψf b[];p=d d t为微分算子㊂可调模型为dd ti^di^qéëêêùûúú=-a^ωe-ωe-a^éëêêùûúúi^di^qéëêêùûúú+b^00b^éëêêùûúúu du qéëêêùûúú+-ωeψf b^éëêêùûúú㊂(26)电流状态方程式(26)可化简为p I^=A^I^+B^U+C^㊂(27)式中:I^=i^di^qéëêêùûúú;A^=-a^ωe-ωe-a^éëêêùûúú;B^=b^00b^éëêêùûúú;161第9期张㊀懿等:新型模型参考自适应的PMSM无差拍电流预测控制C ^=0-ωe ψf b ^éëêêùûúú㊂将式(25)减去式(27)得p e =Ae +ΔAI ^+ΔBU +ΔC ㊂(28)式中:e =I -I ^=e d e q éëêêùûúú=i d -i ^d i q -i^q éëêêùûúú;ΔA =A -A ^;ΔB =B -B ^;ΔC =C -C ^㊂令F =-(ΔAI ^+ΔBU +ΔC ),式(28)改写为p e =Ae -F ㊂(29)根据上述的Popov 稳定性定理,要想使反馈系统保持稳定,则需满足:∀t 1>0,η(0,t 1)=ʏt 1e TF d t ȡ-γ2㊂(30)将F =-(ΔAI ^+ΔBU +ΔC )代入式(30)得:∀t 1>0,η(0,t 1)=-ʏt 1e T (ΔAI ^+ΔBU +ΔC )d t ȡ-γ2㊂(31)将式(31)拆成如下两部分:η1=ʏt0(a -a ^)[e d i ^d+e q i ^q ]d t ȡ-γ23;η2=ʏt 0(b ^-b )[e dud+e q (u q -ωe ψf )]d t ȡ-γ24㊂üþýïïïï(32)式中γ23和γ24是有限正数,且γ2=γ23+γ24㊂显然式(32)成立即式(31)同样成立,从而设计参数自适应律,表达式为:a ^=R ^sL ^=ʏt0g 1(τ)d τ+g 2(t )+R ^sL^(0);b ^=1L ^=ʏt0f 1(τ)d τ+f 2(t )+1L ^(0)㊂üþýïïïï(33)式中R ^s L^(0)和1L^(0)均为所辨识参数的初始值㊂其余计算过程与上文一致,此处不再推导,最终得到待辨识的参数自适应律为:R ^sL^=-k ᶄis+k ᶄp ()[(i d -i ^d )i ^d +(i q -i ^q )i ^q ]+R ^s L^(0);1L ^=k ᵡi s +k ᵡp()[(i d -i ^d )u d +(i q -i ^q )u q -(i q -i ^q )ωe ψf ]+1L ^(0)㊂üþýïïïïïïïïïï(34)式中k ᶄp ,k ᶄi ,k ᵡp ,k ᵡi 均大于0㊂由式(34)可推导并化简后得出定子电阻和定子电感的自适应律为:R ^s =-k ᶄi s +k ᶄp ()[(i d -i ^d )i ^d +(i q -i ^q )i ^q ]+R ^s L^(0)k ᵡi s +k ᵡp ()[(i d -i ^d )u d +(i q -i ^q )u q -(i q -i ^q )ωe ψf ]+1L^(0);L ^=1k ᵡi s +k ᵡp ()[(i d -i ^d )u d +(i q -i ^q )u q -(i q -i ^q )ωe ψf ]+1L^(0)㊂üþýïïïïïïïï(35)㊀㊀因此,通过式(23)和式(35)辨识过程完全稳定后,则可得到定子电阻㊁定子电感和转子磁链的辨识值,该辨识值就是式(7)中定子电阻实际值R s0㊁定子电感实际值L 0和转子磁链实际值ψf0㊂4㊀实验结果及分析本文研究重点在于电机参数失配对无差拍电流预测算法的性能影响及如何进行改进㊂针对提出新型模型参考自适应系统的参数分步辨识来改进无差拍电流预测控制,通过实验的方法来验证其有效性㊂本文采用i d =0的矢量控制,图4为改进后的无差拍电流预测控制系统结构框图㊂4.1㊀实验平台搭建本次实验使用意法半导体ST 公司的STM32F417作为电机控制器的主控芯片,6个半桥臂采用安世半导体nexperia 的BUK9M35-80E,实验用400W 的表贴式永磁同步电机,其参数如表1所示,本次实验平台搭建如图5所示㊂实验过程分为三个阶段,首先进行无差拍电流预测控制器参数和电机参数不匹配的性能实验,观察电机参数失配对性能的影响;其次进行新型模型参考自适应系统的参数分步辨识实验,观察基于该方法下的参数精度;最后将新型模型参考自适应辨识好的参数给入无差拍电流预测控制进行实验,与电机参数同时失配的性能影响进行对比,得出改进后的结论㊂261电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀图4㊀改进后的无差拍电流预测控制系统结构框图Fig.4㊀Structure block diagram of improved DPCC system表1㊀电机参数表Table 1㊀Motor parameters㊀㊀参数数值额定功率/W 400定子电阻/Ω0.15定子电感/mH 10.2转子磁链/Wb 0.25额定转矩/(N㊃m) 1.6极对数5额定转速/(r /min)2500图5㊀实验平台搭建Fig.5㊀Construction of experimental platform4.2㊀验证电机参数失配对无差拍电流预测控制的性能影响4.2.1㊀转子磁链单独失配的影响图6为转子磁链在0.5倍和1.5倍失配下d -q 轴电流启动响应波形㊂图6㊀转子磁链失配下d -q 轴电流启动响应波形Fig.6㊀d -q axis current start response waveform un-der rotor flux linkage mismatch实验条件给定2500r /min 的转速启动运行,其中图6(a)为ψf =0.5ψf0的d -q 轴电流启动响应波形,可以看出,由于转子磁链只和q 轴电流有关,所以对q 轴电流的影响比较大,实际电流i q 在稳态过程中出现了明显的跟踪静差㊂其中图6(b)为ψf =1.5ψf0的d -q 轴电流启动响应波形,其实验结果与361第9期张㊀懿等:新型模型参考自适应的PMSM 无差拍电流预测控制图6(a)相反,实际电流i q 在稳态过程中出现了一定的跟踪静差,实际电流i q 无法跟踪给定电流i ∗q ㊂由上述实验结果可知,转子磁链失配对d 轴电流没有实际影响,但会使q 轴电流出现跟踪静差,导致电流动态跟踪性能变差,对系统的鲁棒性存在一定的影响㊂4.2.2㊀定子电感单独失配的影响图7为定子电感在0.5倍和1.5倍失配下d -q 轴电流启动响应波形㊂实验条件给定2500r /min 的转速启动运行,其中图7(a)为L =0.5L 0的d -q 轴电流启动响应波形,可以看出,实际电流i q 跟踪给定电流i ∗q 的效果略微变差,实际电流i d 在稳态过程中出现了跟踪静差㊂其中图7(b)为L =1.5L 0的d -q 轴电流启动响应波形,实际电流i d 在稳态过程中也出现了跟踪静差㊂由上述实验结果可知,定子电感失配会略微弱化q 轴电流的动态跟踪性,对d 轴电流影响较大,同时对鲁棒性造成了一定的影响㊂图7㊀定子电感失配下d -q 轴电流启动响应波形Fig.7㊀d -q axis current start response waveform un-der stator inductance mismatch4.2.3㊀定子电阻单独失配的影响图8为定子电阻在0.5倍和1.5倍失配下d -q 轴电流启动响应波形㊂实验条件给定2500r /min 的转速启动运行,其中图8(a)为R s =0.5R s0的d -q 轴电流启动响应波形,可以看出,给定电流i ∗q 在稳态过程中略大于实际电流i q ㊂其中图8(b)为R s =1.5R s0的d -q 轴电流启动响应波形,其实验结果与图8(a)相反㊂由上述实验结果可知,定子电阻失配对系统的影响不大,动态跟踪性一般㊂图8㊀定子电阻失配下d -q 轴电流启动响应波形Fig.8㊀d -q axis current start response waveform un-der single stator resistance mismatch4.2.4㊀电机参数同时失配的影响图9为电机参数在0.5倍和1.5倍同时失配下d -q 轴电流启动响应波形,其中电机参数分别为转子磁链,定子电感和定子电阻㊂实验条件给定2500r /min 的转速启动运行,其中图9(a)为R s0=0.5R s ,ψf0=0.5ψf ,L =0.5L 0同时失配下的d -q轴电流启动响应波形,通过与图6(b)㊁图7(a)㊁图8(b)相比,实际电流i q 在稳态过程中产生了更大的跟踪静差,实际电流i d 在稳态过程中产生了一定的跟踪静差,实际电流i q 的动态跟踪性更差㊂其中图9(b)为R s0=1.5R s ,ψf0=1.5ψf ,L =1.5L 0同时失配下的d -q 轴电流启动响应波形,通过与图6(a)㊁图7(b)㊁图8(a)相比,实际电流i q 在稳态过程中产生了更大的跟踪静差,实际电流i d 在稳态过程中产生了一定的跟踪静差,实际电流i q 的动态跟踪性更差㊂由上述实验结果可知,电机参数同时461电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀失配会对动态跟踪性和鲁棒性造成严重影响㊂图9㊀电机参数同时失配d -q 轴电流启动响应波形Fig.9㊀d -q axis current start response waveform un-der simultaneous motor parameters mismatch4.3㊀验证基于新型模型参考自适应的参数分步辨识精度㊀㊀图10为新型模型参考自适应的参数分步辨识波形,表2为辨识结果总结㊂实验条件给定2500r /min 的转速启动运行,由图10和表2可知,由于电机起步阶段的不稳定性,导致辨识的电机参数发生了一定的超调,但是经过调节后迅速趋于稳定㊂其中图10(a)为转子磁链辨识波形,可知转子磁链在30ms 左右开始辨识,辨识结果经过1.5ms 左右的调节时间收敛于0.25Wb 左右,得到的最大误差为3.2%㊂其中图10(b)为定子电阻和电感同时参数辨识波形,可知定子电感和电阻同时在42ms 左右开始辨识,定子电感辨识结果经过2ms 左右的调节时间收敛于10.2mH 左右,得到的最大误差为2.3%,定子电阻辨识结果经过2.7ms 左右的调节时间收敛于0.15Ω左右,得到的最大误差为2.5%㊂由上述实验结果可知,基于新型模型参考自适应的参数分步辨识算法可以在较短时间内收敛到参数给定值附近,并且最大误差很小,达到了很好的参数辨识效果㊂图10㊀新型模型参考自适应的参数分步辨识波形Fig.10㊀Parameter stepwise identification of newMRAS waveform表2㊀辨识结果总结Table 2㊀Identification result summary参数给定值浮动范围最大误差/%转子磁链0.25Wb 0.242~0.257Wb 3.2定子电感10.2mH 9.958~10.445mH 2.3定子电阻0.15Ω0.1463~0.1526Ω2.54.4㊀验证基于参数分步辨识算法下的无差拍电流预测控制性能㊀㊀图11为参数分步辨识算法下的无差拍电流预测控制波形㊂实验给定2500r /min 的转速并且带载1N ㊃m 启动,待转速稳定后突加负载至1.3N㊃m,待转速稳定后再突减负载至1N㊃m,其中图11(a)为d -q 轴电流启动响应波形,通过与图9的电机参数同时失配情况相比,可以看出,实际电流i q 能够很好地跟上给定电流i ∗q ,并且基本无静差,实际电流i d 无明显波动,一直稳定在0左右㊂其中图11(b)㊁图11(c)为突加负载和突减负载的转速和q 轴电流响应波形,可以看出,在突加或突减负载的时刻,转速有大约20r /min 左右的上下波动,但是经过25ms 左右的调节后恢复正常,实际电流i q 由于突加或突减负载上升或下降了1.2A 左右,561第9期张㊀懿等:新型模型参考自适应的PMSM 无差拍电流预测控制但是经过22ms 左右的调节后也立马稳定下来,可以看出,实际电流i q 有很好的负载突变响应和抗干扰能力㊂由上述实验结果可知,将参数分步辨识加入无差拍电流预测控制中,d -q 轴电流的跟踪静差减小,动态跟踪性能提升,并且在负载突变下,系统的鲁棒性加强,可以有效地抑制参数失配带来的影响㊂图11㊀参数分步辨识下的无差拍电流预测控制波形Fig.11㊀DPCC waveform under parameter stepwiseidentification本文的实验数据仅限于此次实验搭建的平台,而本次实验电机参数辨识开始时的超调如何减小,有待进一步研究与分析㊂5㊀结㊀论以400W 的表贴式永磁同步电机为研究对象,本文针对参数失配会导致无差拍电流预测控制的动态跟踪性和鲁棒性差的问题,提出一种基于新型模型参考自适应系统的参数分步辨识来进行改进,通过实验验证分析可以得到以下结论:1)电机参数失配会对无差拍电流预测控制产生一定的影响,包括:动态跟踪效果差㊁跟踪静差大和鲁棒性差,为后面进行改进提供了实验依据;2)通过新型模型参考自适应系统设计出参数分步辨识法,经过相关实验验证出此方法的辨识结果精度高;3)将上述得到的参数辨识结果给入设计好的无差拍电流预测控制中,可以有效地抑制参数失配带来的影响,减小了跟踪静差,提高了系统的动态跟踪效果,同时增强了系统在负载突变下的鲁棒性㊂实验结论表明,基于新型模型参考自适应系统的无差拍电流预测控制具有一定的实用性,但是本文实验中参数辨识开始时的超调如何减小,有待进一步探究㊂参考文献:[1]㊀吴迪,王影,周渊深,等.模型预测控制在永磁同步电机系统中的应用综述[J].防爆电机,2021,56(6):1.WU Di,WANG Ying,ZHOU Yuanshen,et al.Application over-view of model prediction control in PMSM system[J].Explosion-Proof Electric Machine,2021,56(6):1.[2]㊀LI Xuerong,WANG Yang,GUO Xingzhong,et al.An improvedmodel-free current predictive control method for SPMSM drives[J].IEEE ACCESS,2021,9:134672.[3]㊀SONG Zhanfeng,ZHOU Fengjiao,ZHANG Zhen.Parallel-observ-er-based predictive current control of permanent magnet synchro-nous machines with reduced switching frequency[J].IEEE Trans-actions on Industrial Informatics,2019,15(12):6457.[4]㊀XU Xiaohui,HE Zhongxiang,YU Hu,et al.Deadbeat predictivecurrent control for permanent magnet synchronous motor [C ]//201922nd International Conference on Electrical Machines and Systems (ICEMS),August 11-14,2019,Harbin,China.2019:1-5.[5]㊀SURYOATMOJO H,CLADELLA F G,LYSTIANINGRUM V,etal.Performance of BLDC motor speed control based on hysteresiscurrent control mechanism[C]//2018International Seminar on In-telligent Technology and Its Applications(ISITIA),August 30-31,2018,Bali,Indonesia.2018:147-152.[6]㊀ANER M,BENAIFA N,NOWICKI E.A permanent magnet syn-chronous motor drive employing a three-level very spars matrix con-verter with soft switching and SVM hysteresis current control[C]//CCECE 2010,May 2-5,2010,Calgary,AB,Canada.2010:1-7.661电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀[7]㊀KUMAR P,BHASKAR D V,BEHERA R K.Sliding mode ob-server based sensorless current hysteresis controller for PMBLDC motor drive[C]//20203rd International Conference on Energy, Power and Environment:Towards Clean Energy Technologies, March5-7,2021,Shillong,Meghalaya,India.2021:1-6. [8]㊀LEKSHMI A,SANKARAN R,USHAKUMARI parison ofperformance of a closed loop PMSM drive system with modified predictive current and hysteresis controllers[C]//2008Interna-tional Conference on Electrical Machines and Systems,October17-20,2008,Wuhan,China.2008:2876-2881.[9]㊀王发良.永磁同步电机双闭环调速系统PI控制器设计[J].南方农机,2022,53(3):36.WANG Faliang.Design of PI controller for double closed-loop speed regulating system ofpermanent magnet synchronous motor [J].China Southern Agricultural Machinery,2022,53(3):36.[10]㊀王莉娜,朱鸿悦,杨宗军.永磁同步电动机调速系统PI控制器参数整定方法[J].电工技术学报,2014,29(5):104.WANG Lina,ZHU Hongyue,YANG Zongjun.Tuning methodfor PI controllers of PMSM driving system[J].Transactions ofChina Electrotechnical Society,2014,29(5):104. [11]㊀丁腾,杨平,邓亮,等.基于MCP标准函数的永磁同步电机电流环PI控制[J].电机与控制应用,2015,42(11):1.DING Teng,YANG Ping,DENG Liang,et al.Multi-capacityprocess standard transfer function based current control of PMSM[J].Electric Machines&Control Application,2015,42(11):1.[12]㊀许文波,焦玮玮,潘龙.基于极点配置的PMSM电流环PI控制器设计[J].航天控制,2021,39(1):74.XU Wenbo,JIAO Weiwei,PAN Long.Design of PI controllersfor PMSM current-loop based on pole-placement[J].AerospaceControl,2021,39(1):74.[13]㊀周凯,孙彦成,王旭东,等.永磁同步电机的自抗扰控制调速策略[J].电机与控制学报,2018,22(2):57.ZHOU Kai,SUN Yancheng,WANG Xudong,et al.Active dis-turbance rejection control of PMSM speed control system[J].E-lectric Machines and Control,2018,22(2):57. [14]㊀曾岳南,曾祥彩,周斌.永磁同步电机传动系统电流环非线性自抗扰控制器的设计与稳定性分析[J].电工技术学报,2017,32(17):135.ZENG Yuenan,ZENG Xiangcai,ZHOU Bin.Nonlinear activedisturbance rejection controller design for current loop of PMSMdrive system and its stability analysis[J].Transactionsof ChinaElectrotechnical Society,2017,32(17):135. [15]㊀王宏佳,徐殿国,杨明.永磁同步电机改进无差拍电流预测控制[J].电工技术学报,2011,26(6):39.WANG Hongjia,XU Dianguo,YANG Ming.Improved deadbeatpredictive current control strategy of permanent magnet motordrives[J].Transactions of China Electrotechnical Society,2011,26(6):39.[16]㊀GONG Zhenjie,ZHANG Chengning,BA Xin,et al.Improveddeadbeat predictive current control of permanent magnet synchro-nous motor using a novel stator current and disturbance observer[J].IEEE ACCESS,2021,9:142815.[17]㊀牛里,杨明,王庚,等.基于无差拍控制的永磁同步电机鲁棒电流控制算法研究[J].中国电机工程学报,2013,33(15):78.NIU Li,YANG Ming,WANG Geng,et al.Research on the ro-bust current control algorithm of permanent magnet synchronousmotor based on deadbeat control principle[J].Proceedings of theCSEE,2013,33(15):78.[18]㊀吴敏,肖伸平,张晓虎,等.基于模糊PI的永磁同步电机电流预测控制[J].电工技术,2019(3):5.WU Min,XIAO Shenping,ZHANG Xiaohu,et al.Predictivecontrol of permanent magnet synchronous motor based on fuzzy PI[J].Electric Engineering,2019(3):5.[19]㊀YANG Fan,YANG Kai,ZHANG Yahui,et al.Robustness im-provement of deadbeat predictive current control based on nonlin-ear extended state observer[C]//202023rd International Confer-ence on Electrical Machines and Systems(ICEMS),November24-27,2020,Hamamatsu,Japan.2020:1385-1390. [20]㊀肖海峰.永磁同步电机改进型电流预测控制策略研究[J].微特电机,2019,47(4):52.XIAO Haifeng.Research on improved current prediction controlstrategy of permanent magnet synchronous motor[J].Small&Special Electrical Machines,2019,47(4):52.(编辑:邱赫男)761第9期张㊀懿等:新型模型参考自适应的PMSM无差拍电流预测控制Copyright©博看网. All Rights Reserved.。
模型参考自适应控制
10.自适应控制严格地说,实际过程中的控制对象自身及能所处的环境都是十分复杂的,其参数会由于种种外部与内部的原因而发生变化。
如,化学反应过程中的参数随环境温度和湿度的变化而变化(外部原因),化学反应速度随催化剂活性的衰减而变慢(内部原因),等等。
如果实际控制对象客观存在着较强的不确定,那么,前面所述的一些基于确定性模型参数来设计控制系统的方法是不适用的。
所谓自适应控制是对于系统无法预知的变化,能自动地不断使系统保持所希望的状态。
因此,一个自适应控制系统,应能在其运行过程中,通过不断地测取系统的输入、状态、输出或性能参数,逐渐地了解和掌握对象,然后根据所获得的过程信息,按一定的设计方法,作出控制决策去修正控制器的结构,参数或控制作用,以便在某种意义下,使控制效果达到最优或近似更优。
目前比较成熟的自适应控制可分为两大类:模型参考自适应控制(Model Reference Adaptive Control)和自校正控制(Self-Turning)。
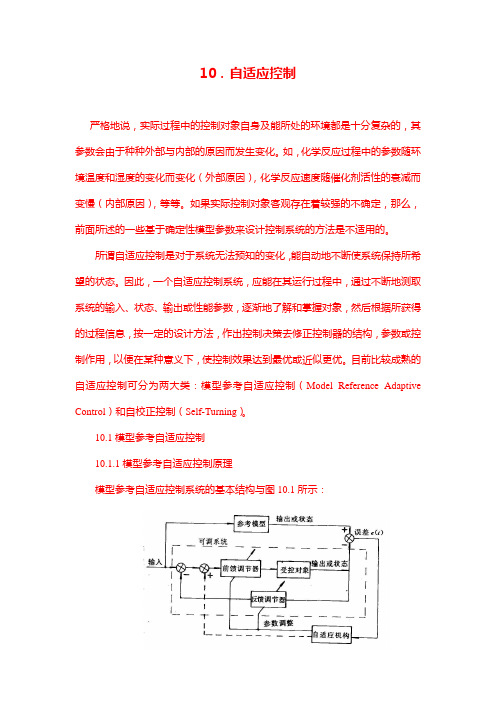
10.1模型参考自适应控制10.1.1模型参考自适应控制原理模型参考自适应控制系统的基本结构与图10.1所示:10.1模型参考自适应控制系统它由两个环路组成,由控制器和受控对象组成内环,这一部分称之为可调系统,由参考模型和自适应机构组成外环。
实际上,该系统是在常规的反馈控制回路上再附加一个参考模型和控制器参数的自动调节回路而形成。
在该系统中,参考模型的输出或状态相当于给定一个动态性能指标,(通常,参考模型是一个响应比较好的模型),目标信号同时加在可调系统与参考模型上,通过比较受控对象与参考模型的输出或状态来得到两者之间的误差信息,按照一定的规律(自适应律)来修正控制器的参数(参数自适应)或产生一个辅助输入信号(信号综合自适应),从而使受控制对象的输出尽可能地跟随参考模型的输出。
在这个系统,当受控制对象由于外界或自身的原因系统的特性发生变化时,将导致受控对象输出与参考模型输出间误差的增大。
模型参考自适应控制与鲁棒自适应控制比较

模型参考自适应控制与鲁棒自适应控制比较自适应控制是一种常见的控制策略,旨在使系统能够自动调整控制参数以适应不确定性和变化的环境。
在自适应控制中,模型参考自适应控制(Model Reference Adaptive Control,简称MRAC)和鲁棒自适应控制(Robust Adaptive Control,简称RAC)是两种常用的方法。
本文将对这两种自适应控制方法进行比较分析。
一、模型参考自适应控制模型参考自适应控制是一种基于模型参考的自适应控制方法。
它通过引入一个模型参考器,将期望输出与实际输出进行比较,然后根据比较结果对控制参数进行在线调整。
模型参考自适应控制的主要思想是通过使用与被控对象相似的模型来进行控制,从而提高系统的鲁棒性和跟踪性能。
模型参考自适应控制的主要优点是能够实现对系统模型误差的自适应校正,具有较好的系统鲁棒性和跟踪精度。
该方法在理论上是可行的,并已经在一些实际控制系统中得到了应用。
然而,模型参考自适应控制也存在一些局限性,比如对模型的要求较高、对系统参数的连续性和可观测性要求较严格等。
二、鲁棒自适应控制鲁棒自适应控制是一种能够处理系统不确定性和外部干扰的自适应控制方法。
它通过设计鲁棒控制器来使系统具有鲁棒性,同时引入自适应机制对控制参数进行在线调整。
鲁棒自适应控制的关键在于设计合适的鲁棒控制器,使系统能够在存在不确定性和干扰的情况下保持稳定性和性能。
鲁棒自适应控制的主要优点是能够在存在不确定性和干扰的情况下保持系统的稳定性和性能。
相比于模型参考自适应控制,鲁棒自适应控制对系统模型的要求相对较低,具有更好的适用性和实用性。
然而,鲁棒自适应控制也存在一些挑战,比如对控制器设计的要求较高、控制参数调整的收敛性等。
三、比较分析模型参考自适应控制和鲁棒自适应控制作为两种常见的自适应控制方法,各有优势和劣势。
模型参考自适应控制在鲁棒性和跟踪性能方面具有一定的优势,适用于对系统模型较为精确的情况。
现代控制理论 第十七章 模型参考自适应控制
(17-15) (17-15) (17-15)
D ( s ) yM ( s ) = K M N ( s ) r ( s )
ɺ K o = Be1 ( t ) y M ( t )
其结构图如图17-3所示。由图可见,自适应机构包括了一个乘法 器及一个积分器。M.I.T.自适应控制方案的优点是结构比较简单, 并且自适应律所需信号只是参考模型的输出 y M ( t ) 以及参考模型输 出与可调系统输出之误差 e1 ( t ),它不需要状态信息,因此这些都是 容易获得的。但是M.I.T.方案不能保证自适应系统总是稳定的,因 此,最后必须对整个系统的稳定性进行检验,这可以通过以下例 子来说明。
t ∂J ∂e = ∫ 2e1 1 dτ 0 ∂K 0 ∂K 0
(17-4)
按梯度法, K 0 的调整值应为
∆K 0 = − B1 ∂J ∂K 0
(17-5)
式中, B1 为步长,是经适当选定的正常数。经一步调整后 K0 值为
Ko = Ko0 − B1 ∂J 可以通过如下运算来求梯度 ∂Ko ∂J ∂Ko
在可调系统中仅设置了一个可调的前置增益 K M ,由自适应机构来进 行调节。选取性能指标为
J = ∫ e12 (τ ) dτ
t 0
(17-3)
式中,e1 = yM − ys 为输出广义误差。要求设计调节 K 0 的自适应律,使 以上性能指标达到最小。下面,用梯度法来求它的自适应律。 为使J达最小,首先要求出J对 K0 的梯度;
WM ( s ) = KM a2 s 2 + a1s + 1
试按M.I.T.自适应方案设计自适应系统。
解:
系统数学模型为 输出误差: 模型输出: 自适应律:
ɺ a2 ɺɺ1 + a1e1 + e1 = ( K M − Ko K s ) r e
自适应滑模控制与模型参考自适应控制比较

自适应滑模控制与模型参考自适应控制比较自适应控制是现代控制理论中的一种重要方法,它可以对复杂系统进行自主建模、参数在线估计和控制策略调整。
其中,自适应滑模控制与模型参考自适应控制是两种常用的自适应控制方法。
本文将就这两种方法进行比较,并分析其优缺点以及适用领域。
一、自适应滑模控制自适应滑模控制(Adaptive Sliding Mode Control,ASMC)是滑模控制(Sliding Mode Control,SMC)的改进和扩展。
SMC通过引入滑模面将系统状态限制在此面上,从而使系统鲁棒性较强。
然而,SMC 在实际应用中易受到系统参数变化和外界扰动的影响,导致滑模面的滑动速度过大或过小,影响系统的稳定性和控制性能。
ASMC通过自适应机制对滑模控制进行改进。
其核心思想是在线估计系统的未知参数,并将估计结果应用于滑模控制律中,使控制器能够自主调整以适应系统参数的变化。
具体来说,ASMC引入自适应法则对系统参数进行估计,并将估计值作为滑动面的参数,实现参数自适应调整。
这样,ASMC具备了适应性较强的控制能力,并能够更好地处理参数辨识的问题,提高了系统的稳定性和控制性能。
二、模型参考自适应控制模型参考自适应控制(Model Reference Adaptive Control,MRAC)是一种将模型参考和自适应控制相结合的方法。
其主要思想是建立系统的参考模型,并通过自适应机制实现控制器参数的自适应调整,使系统的输出与参考模型的输出误差最小化。
通过在线调整控制器的参数,MRAC能够适应系统参数的变化,实现对系统动态特性的自主调节。
在MRAC中,参考模型起到了重要的作用。
通过设计适当的参考模型,可以使系统输出保持在期望的轨迹上,并利用误差进行控制器参数的在线调整。
与ASMC相比,MRAC更加关注系统的闭环性能,能够实现更高的跟踪精度和鲁棒性。
三、比较与分析自适应滑模控制和模型参考自适应控制都是自适应控制的重要方法,但在应用场景和性能表现上存在一些差异。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Key Problem: determine the adjustment mechanism so that a desired performance is obtained T wo Methods: Design controller to drive plant response to mimic ideal response (error = y plant-y model => 0)Designer chooses: reference model, controller structure, Form cost function: Can chose different cost functions EX:From cost function and MIT rule, control law can be formed EX: Adaptation of feedforward gainAdjustment Mechanismy modelu y plant u c ΠΠθReference ModelPlant-+ For system where is unknown Goal: Make it look likeusing plant (note, plant model is scalar multiplied by plant)Controller: Choose cost function: Write equation for error: Calculate sensitivity derivative: Apply MIT rule: Gives block diagram:u c considered tuning parameter NOTE: MIT rule does not guarantee error convergence or stability usually kept small Based upon the concept of energy and the relation of stored energy with system stability.Example: Consider a mass spring damper system .The dynamics of this system is expressed as A corresponding state model is At any instant, the total energy V in the system consists of ◦ kinetic energy of the moving mass and◦ potential energy stored in the spring ThusThusThis means that total energy is positive unless the system is at rest at the equilibrium point xThe rate of change of energy is given by Lyapunov’s direct method makes use of a Lyapunov functionof the state may be thought as a generalized energy. When a system is described mathematically, it may not be clear what “energy” means.Consider a zero-input system described by the state equationwhere x is an n Assume that the system has only one equilibrium point The system of (1) isConsider a spherical region of radius “r ” about anequilibrium state x || x-x e || defined as follows: Let And let x −x e = An equilibrium state x e of the system of (1) is said to be stable in the sense of Lyapunov if, corresponding to eachthat trajectories starting in(ε) as t increases indefinitely. The real numberalso depends on t Choose the region An equilibrium state x e of the system of (1) is said to be asymptotically stable if it is stable in the sense of Liapunov and if every solution starting within converges, without leavingindefinitely. Note that asymptotic stability is a local concept. A knowledge of largest region of asymptotic stability is usually necessary.attraction. It is that part of the state space in which asymptotically stable trajectories originate. trajectory originating in the domain of attraction is asymptotically stable. If asymptotic stability holds for all states ( all points in the state space) from which trajectories originate, the equilibrium state is said to be asymptotically stable in the large.equilibrium statebe asymptotically stable in the large if it is stable Obviously, a necessary condition for asymptotic An equilibrium stateunstable if for some real number any real numberthere is always a state xtrajectory starting at this state leaves Theorem-1: If there exists a scalar functionfirst partial derivatives and satisfying the conditions V(x,t) is positive definite is negative definitethen the equilibrium state at the origin is uniformly If in addition, The condition of the last theorem can be stated alternately as follows: V(x,t) is positive definite is negative semidefinite Then the origin of the system is uniformly asymptotically Theorem-1: Consider a system described by If there exists a scalar functioncontinuous first partial derivatives and satisfying the conditions V(x,t) is positive definite is negative semidefinitethen the equilibrium state at the origin is uniformly Theorem-1: Consider a system described by If there exists a scalar functioncontinuous first partial derivatives and satisfying the conditions W(x,t) is positive definite in some region about is positive definite in the same region then the equilibrium state at the origin is unstable.1. The stability conditions obtained using Lyapunov functions aresufficient conditions but are not necessary conditions2. A Lyapunov function for a particular system is not unique.Thus failure to find a suitable Lyapunov function to showstability or asymptotic stability or instability of the equilibrium state under consideration can give no information on stability.3. Although a particular Lyapunov function may prove that theequilibrium state under consideration is stable orasymptotically stable in the regionequilibrium state, it does not necessarily mean that themotions are unstable outside the regionFor a stable or asymptotically stable equilibrium state, aLyapunov function with the required properties always exists. Consider the system described bywhere x is a nnonsingular matrix. A necessary and sufficient condition for the equilibrium state x=0 to be asymptotically stable in the large is that, The scalar function For the system of eqn(1), let us choose as a possible Lyapunov functionwhere P is a positive definite Hermitian matrix. (If x is real vector, then P can be chosen to be a positive definite real symmetric matrix). The time derivative ofas: Since V(x) was chosen to be positive definite, it is required that, for asymptotic stability, be negative definite. Thus we requirewhere Tand the matrix P is tested for positive definiteness. T o check if a given matrix A is asymptotically stable or not T ake an arbitrary real symmetric positive definite matrix Q ( an identity matrix Q=I Considering P as a real symmetric matrix , solve the Lyapunov equation A Check the definiteness of the matrix P If P>0 i.e. P is positive definite, The positive definiteness of an n×n matrix is tested using Sylvester’s criterion, which states that a necessary and sufficient condition for the matrix to be positive definite is that the determinants of all the successive principal minors of the matrix be positive. Consider the matrixwhere the overbar denotes the complex conjugate€Q(The matrix P is positive definite if all the successive principal are Positive, that is if,pLet A be an n×n symmetric matrix. A (k×k) submatrix of A formed by deleting (n-k) columns, say columns j,j,….j and the same n-k rows from A, jdeterminant of a (kminor of A.ExampleThere is one third order principal minor, which is det(A).Definition: Let A be an n×n symmetric matrix. The k-th order principal submatrix of A obtained by deleting the last (n-k) rows and columns of A is called a k-th order leading principal submatrix of A denoted as A. Its determinant is called the k-th order leading principal minor of A, denoted by |ALet A be an na. A is positive definite if and only if all its n-leading principal minors are strictlypositive.b. A is negative definite if and only if all its n-leading principal minors alternate inThe k-th order leading principal minor should have the same sign as (-1)c. A is positive semidefinite if and only if every principal minor of A is non negative.d. A is negative semidefinite if and only if every principal minor of odd order is non- Determine the stability of the equilibrium state of the following system: The system has only one equilibrium state at the origin. By Note that A is a real matrix and P must be a real symmetric Solving the Lyapunov equation If the matrix turns out to be positive definite, then x*Px is a Lyapunov function and the origin is asymptotically stable. Solving for p’s gives p Since P is positive definite, the origin of the system is asymptotically stable in the large. The Lyapunov function for this system isV( Determine the stability of the equilibrium state of the following system:By choosing Q=I and substituting I into the Lyapunov equation gives Note that A is a real matrix and P must be a real symmetric matrix LetSolving the Lyapunov equation01⎡ ⎣ ⎢ =−⎡ ⎣ ⎢ ⇒−。