7.5 用力法计算超静定结构在支座移动和温度变化时的内力
高等工程力学1 超静定结构内力计算

M i 、Qi、N i ——任取的基本体系在单位力作用下的内力图,而单位力是加在 要求位移的截面上的;
—RK—基本体系支座k在单位力作用下的反力;
cK——k支座的实际位移。 公式(1-7)的前三项表示基本体系在荷载和多余未知力的作用下的位移,后
三项表示基本体系在温度变化和支座移动情况下引起的位移。
1 超静定结构内力计算
⑵ 有结点线位移的情况 计算这类结构时;原利用公式(1-11)考虑各结点的弯矩平衡外,还需考虑 相应杆端剪力的平衡。取适当的截面截出结构的一部分,通常是截断各柱的柱顶 端。取出横梁。考虑剪力平衡,建立剪力平衡方程,即
Qx 0
(1-12)
补充了剪力平衡方程后,方程式的数目仍然与未知数的数目相等,方程式总是 可以求解的。
1 超静定结构内力计算
§1.1.1力法的基本原理(续4)
由力法方程解出未知力X1、X2、…Xn后,超静定结构的内力可根据叠加原理 用下式计算:
M M1X1 M2X2 MnXn MP Q Q1 X 1 Q2 X 2 Qn X n QP N N1X1 N2 X 2 Nn X n NP
§1.2.4利用典型方程求解结构的位移和内力(续1)
同理附加链杆处的反力也为零,即
R2 R21 R22 R2P 0
或写成
r11Z1 r12Z2 R1P 0 r21Z1 r22Z2 R2P 0
对于有n个基本未知数的结构,位移法典型方程式为:
r11Z1 r12 Z2 r1n Zn R1P 0 r21Z1 r22 Z2 r2n Zn R2P 0
§1.2.1等截面直杆的转角位移方程式(续1)
AB杆产生位移后,杆端的总弯矩为
M AB
M
/ AB
M
用力法求解超静定结构
用力法求解超静定结构概述超静定结构是指结构中的支座和约束条件多于结构自由度的情况。
用力法是一种经典的结构分析方法,常用于求解超静定结构。
本文将介绍用力法求解超静定结构的基本原理和步骤,并通过实例加以说明。
一、基本原理用力法的基本原理是根据平衡条件和变形约束,通过假设未知力的大小和方向,建立力的平衡方程和变形方程,解出未知力和结构的变形。
用力法适用于各种类型的结构,包括梁、柱、桁架等。
二、步骤用力法求解超静定结构的步骤如下:1. 选择合适的剖面根据结构的几何形状和约束条件,选择合适的剖面,将结构分割为若干个部分。
2. 假设未知力的方向和大小根据结构的特点和约束条件,假设未知力的方向和大小。
通常,未知力的方向可以根据结构的几何形状和外力的作用方向来确定,而未知力的大小则需要通过力的平衡方程来求解。
3. 建立力的平衡方程根据假设的未知力和结构的几何形状,建立力的平衡方程。
平衡方程包括力的平衡条件和力的矩平衡条件。
4. 建立变形方程根据结构的变形情况和约束条件,建立变形方程。
变形方程可以根据结构的刚度和约束条件来确定。
5. 解方程将力的平衡方程和变形方程联立,解方程组得到未知力和结构的变形。
6. 检验结果将求解得到的未知力和结构的变形代入原平衡方程和变形方程中,检验结果的准确性。
如果结果符合平衡和变形的要求,则求解成功;如果结果不符合要求,则需要重新假设未知力并重新求解。
三、实例分析为了更好地理解用力法求解超静定结构的步骤和原理,下面以一个简单的梁结构为例进行分析。
假设有一根悬臂梁,在梁的自重和外力作用下,需要求解支座反力和梁的变形。
1. 选择合适的剖面选择悬臂梁的剖面,将梁分割为两个部分:悬臂部分和支座部分。
2. 假设未知力的方向和大小假设支座反力的方向向上,大小为R。
3. 建立力的平衡方程根据力的平衡条件,可以得到悬臂部分的平衡方程:R - F = 0,其中F为梁的自重。
4. 建立变形方程根据梁的几何形状和约束条件,可以建立悬臂部分的变形方程,得到悬臂部分的弯矩和挠度。
结构力学章节习题及参考答案
习题3.1是非判断题
(1) 在使用内力图特征绘制某受弯杆段的弯矩图时,必须先求出该杆段两端的端弯矩。( )
(2) 区段叠加法仅适用于弯矩图的绘制,不适用于剪力图的绘制。( )
(3) 多跨静定梁在附属部分受竖向荷载作用时,必会引起基本部分的内力。( )
(4)习题3.1(4)图所示多跨静定梁中,CDE和EF部分均为附属部分。( )
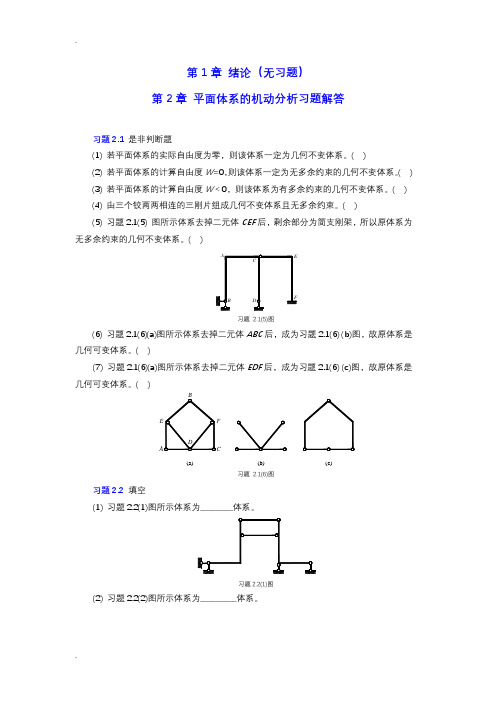
(7) 习题2.1(6)(a)图所示体系去掉二元体EDF后,成为习题2.1(6) (c)图,故原体系是几何可变体系。( )
习题 2.1(6)图
习题2.2填空
(1) 习题2.2(1)图所示体系为_________体系。
习题2.2(1)图
(2) 习题2.2(2)图所示体系为__________体系。
习题 2-2(2)图
(4)习题5.1(3)图(a)和(b)所示两结构的变形相同。( )
习题7.2填空题
(1)习题5.2(1)图(a)所示超静定梁的支座A发生转角,若选图(b)所示力法基本结构,则力法方程为_____________,代表的位移条件是______________,其中1c=_________;若选图(c)所示力法基本结构时,力法方程为____________,代表的位移条件是______________,其中1c=_________。
(3) 习题7.2(3)图所示刚架各杆的线刚度为i,欲使结点B产生顺时针的单位转角,应在结点B施加的力矩MB=______。
习题 7.2(1)图习题 7.2(2)图 习题 7.2(3)图
(4) 用力矩分配法计算习题7.2(4)图所示结构(EI=常数)时,传递系数CBA=________,CBC=________。
用力法计算超静定结构.
解:力法方程
x1 11 x1 1 p 0 k
例题3
p
A
B k 8m 8m 原结构
C
D k 8m 2m p
A
B k
C x2
D x1
x1 x x 11 1 12 2 1P k 21 x1 22 x2 1 P 0
1P M 1M P N 1NPl ds E1 I 1 EA 4 5ql 384E1 I1
ql 2 8
2 2 1 2 l 5 l ( ql ) E1 I1 3 8 2 8 4
0
0
0
x1
1 p
11
5ql 4 384E1 I 1 3 l h s3 48E1 I 1 E 2 A2 2h 2 E 3 A3
x1
11
3 ql 8
试选取另一基本结构求解: x1
q 2 EI l x1=1 原结构 2 ql/8 基本结构 2 ql/8 5ql/8 3ql/8 M l图 1 2 ql/8 MP图 q
1 M图
Q图
解:力法方程
11 x1 1 p 0
1 1 l 21 l ( )( ) EI 2 3 3 EI
基本结构(3)
二、超静定刚架的计算
力法方程:
11 x1 12 x2 1 P 0 21 x1 22 x2 2 P 0
式中:
11
1 1 2 64 ( 4 4) ( 4) EI 2 3 3 EI
22
1 1 2 l 81 ( 3 3) ( 3) [(3 4) 3] 2 EI 2 3 EI 2 EI
年国家开放大学电大自己《土木工程力学》形成性考核及答案

年国家开放大学电大自己《土木工程力学》形成性考核及答案2022年土木工程力学(本)形成性考核册土木工程力学(本)形成性考核册作业一一、选择题(每小题2分,共20分)1.三刚片组成几何不变体系的规则是(B)A三链杆相联,不平行也不相交于一点B三铰两两相联,三铰不在一直线上C三铰三链杆相联,杆不通过铰D一铰一链杆相联,杆不过铰2.在无多余约束的几何不变体系上增加二元体后构成(C)A可变体系B瞬变体系C无多余约束的几何不变体系有多余约束的几何不变体系3.瞬变体系在一般荷载作用下,(C)A产生很小的内力B不产生内力C产生很大的内力D不存在静力解答4.已知某体系的计算自由度W=-3,则体系的(D)A自由度为3B自由度等于0C多余约束数等于3D多余约束数大于等于35.不能作为建筑结构使用的是(D)A无多余约束的几何不变体系B有多余约束的几何不变体系C几何不变体系D几何可变体系6.图示桁架有几根零杆(D)A2C4D6FP7.下图所示结构的弯矩图形状应为(A)FPABCD图1FP8.图示多跨静定梁的基本部分是(B )AAB部分BBC部分CCD部分DDE部分ABCDE9.荷载作用下产生桁架位移的主要原因是(AA轴向变形B弯曲变形C剪切变形D扭转变形10.三铰拱在集中力作用下其合理拱轴线形状是(D)A折线B圆弧C双曲线D抛物线二、判断题(每小题2分,共20分)1.多余约束是体系中不需要的约束。
()2.如果体系的计算自由度大于零,那么体系一定是几何可变体系。
()3.两根链杆的约束作用相当于一个单铰。
()4.一个体系是有n个自由度的几何可变体系,那么加入n个约束后就成为无多余约束的几何不变体系。
()5.两刚片用三链杆相联,且三链杆平行不等长,则构成瞬变体系。
()6.图示两个单跨梁,同跨度同荷载。
但横截面形状不同,故其内力也不相同。
(√)FPFP7.三铰拱的矢高f越大,水平推力也越大。
()8.求桁架内力时截面法所截取的隔离体包含两个或两个以上的结点。
力法、位移法求解超静定结构讲解

力法、位移法求解超静定结构讲解
超静定结构是指在结构中存在多余的支座或者杆件,使得结构的自由度小于零,即结构无法通过静力学方法求解。
在这种情况下,我们需要采用力法或者位移法来求解结构的内力和位移。
力法是指通过假设结构内力的大小和方向,来求解结构的内力和位移的方法。
在力法中,我们需要假设结构内力的大小和方向,然后通过平衡方程和变形方程来求解结构的内力和位移。
力法的优点是计算简单,适用于简单的结构,但是对于复杂的结构,力法的假设可能会导致误差较大。
位移法是指通过假设结构的位移,来求解结构的内力和位移的方法。
在位移法中,我们需要假设结构的位移,然后通过平衡方程和变形方程来求解结构的内力和位移。
位移法的优点是适用于复杂的结构,可以准确地求解结构的内力和位移,但是计算较为繁琐。
在实际工程中,我们通常采用力法和位移法相结合的方法来求解超静定结构。
首先,我们可以通过力法来确定结构的内力大小和方向,然后再通过位移法来求解结构的位移。
这种方法可以充分利用力法和位移法的优点,减小误差,提高计算精度。
超静定结构的求解需要采用力法和位移法相结合的方法,通过假设结构的内力和位移,来求解结构的内力和位移。
在实际工程中,我们需要根据具体情况选择合适的方法,以保证计算精度和效率。
哈工大结构力学题库四章
第四章 力 法一 判 断 题1. 图示结构,据平衡条件求出B 点约束力,进而得图示弯矩图,即最后弯矩图。
( )(X )题1图 题2图2. 图示结构用力法求解时,可选切断杆件2,4后的体系作为基本结构。
( )(X )3. 图a 结构,支座B 下沉a 。
取图b 中力法基本结构,典型方程中1C a ∆=-。
( ) (X )题3图 题4图4. 图a 所示桁架结构可选用图b 所示的体系作为力法基本体系。
( )(√)5. 图a 结构,取图为力法基本结构,1C l θ∆=。
( ) (X )题5图 题6图6. 图a 结构的力法基本体系如图b ,主系数3311/(3)/()l EI l EA δ=+。
( )(X )7. 图示结构用力法解时,可选切断1,2,3,4杆中任一杆件后的体系作为基本结构.( )(X )题7图 题9图 8. 图示结构受温度变化作用,已知α,h ,选解除支杆B 为力法基本体系(设B X 向上为正),典型方程中自由项2121()/(4)t a t t l h ∆=--。
( )(X )9. 图a 结构,力法基本体系如图b ,自由项412/(8)P ql EI ∆=-。
( )(X )题10图 题11图10.图示超静定梁在支座转动1A ϕ=时的杆端弯矩26.310AB M KN m =⨯⋅,22( 6.310)EI KN m =⨯⋅。
( )(√) 11. 图a 结构,取图b 为力法基本结构,h 为截面高度,α为线胀系数,典型方程中2121()/(2)t a t t l h ∆=--。
( )(X )题12图 题13图 12. 图a 结构,取力法基本体系如图b 所示,则1/C l ∆=∆( )。
(X )13. 超静定结构在荷载作用下的反力和内力,只与各杆件刚度的相对数值有关。
( )(√)14. 图示结构的超静定次数为4。
( )(X )题15图 题16图15. 图示结构,选切断水平杆为力法基本体系时,其3112/(3)h EI δ=。
§7-5 用力法计算超静定结构在
二、温度变化时超静定结构的计算
温度变化时若体系中无支座移动或弹性支 座的存在, 座的存在,则对应于第i多余约束处的位移 条件可以描述为: 条件可以描述为:
基本结 构在温 度变化 时的I处 时的 处 位移
∆ i = x1δ i 1 + x 2δ 2 i + ⋅ ⋅ ⋅ + x iδ ii + ⋅ ⋅ ⋅ + x nδ ni + ∆ it = 0
X2 = − 6EI ∆ AB 2 l
解得 5)最后内力图为
X1 = −
6EI ∆ AB , 2 l
在支座位移影响下,超静定结构可能将产生内力和反力, 可能将产生内力和反力 在支座位移影响下 , 超静定结构 可能 将产生内力和反力 , 其内 力和反力与各杆的弯曲刚度EI的实际值有关 且成正比。 有关, 力和反力与各杆的弯曲刚度 的实际值有关,且成正比。
X1 = − ∆ 1c
δ 11
=−
M = M1X1
2c 3 EIc =− 3 2l 3 l 3 EI
例
图示两端固定梁AB之间产生了竖向相对位移△ 图示两端固定梁 之间产生了竖向相对位移△AB,试用力 之间产生了竖向相对位移 法分析其内力并作弯矩图和剪力图。 为常数 为常数。 法分析其内力并作弯矩图和剪力图。EI为常数。
解:1)选择基本体系,如图所示。 1)选择基本体系,如图所示。 选择基本体系 2)力法典型方程为 δ 11 X 1 + δ12 X 2 + ∆1c = 0 ) δ 21 X 1 + δ 22 X 2 + ∆ 2c = 0 3)作单位弯矩图,由图乘法求得各系数为 作单位弯矩图,
l , δ 11 = 3EI
l l , δ 12 = δ 22 = − δ 22 = 3EI 6EI
超静定结构的计算
一. 用力法计算超静定结构(一)复习重点1. 理解超静定结构及多余约束的概念,学会确定超静定次数2. 理解力法原理3. 掌握用力法计算超静定梁和刚架(一次及二次超静定结构)4. 掌握用力法计算超静定桁架和组合结构(一次及二次超静定结构)5. 了解温度变化、支座移动时超静定结构的计算(一次超静定结构)(二)小结1. 超静定结构、多余约束、超静定次数(1)超静定结构从几何组成角度,结构分为静定结构和超静定结构。
静定结构:几何不变,无多余约束。
超静定结构:几何不变,有多余约束。
(2)多余约束多余约束的选取方案不唯一,但是多余约束的总数目是不变的。
(3)超静定次数多余约束的个数是超静定次数。
判断方法:去掉多余约束使原结构变成静定结构。
2. 力法原理力法是计算超静定结构最基本的方法(1)将原结构变为基本结构(2)位移条件:(3)建立力法方程3.用力法求解超静定梁和刚架例:二次超静定结构(1)原结构变为基本结构(2)位移条件(3)力法方程(3)绘弯矩图4. 用力法计算超静定桁架和组合结构注意各杆的受力特点:二力杆只有轴力,受弯杆的内力有弯矩、剪力和轴力。
例:超静定组合结构(1)原结构变为基本结构(2)位移条件(3)力法方程(4)绘弯矩图5. 了解温度变化、支座移动时超静定结构的内力计算(1)温度变化时,超静定结构的内力计算原结构变为基本结构位移条件力法方程(2)支座移动时,超静定结构的内力计算原结构变为基本结构位移条件二. 用位移法计算超静定结构(一)复习重点1. 了解位移法基本概念及位移法与力法的区别2. 掌握用位移法计算超静定结构(具有一个及两个结点位移)3. 掌握计算对称结构的简化方法(二)小结1. 了解位移法基本概念及位移法与力法的区别位移法是求解超静定结构的又一基本方法,适用于求解超静定次数较高的连续梁和刚架。
位移法的前提假设:对于受弯的杆件,可略去轴向变形和剪切变形的影响,2. 掌握用位移法求解超静定结构(具有一个及两个结点位移的结构)例:求连续梁的内力解:(1)确定基本未知量及基本体系基本未知量是结点B的角位移。
支座移动和温度改变时超静定结构的内力计算
目录
力法\支座移动和温度改变时超静定结构的内力计算 从以上分析可以看到,选不同形式的基本结构,建立的力法方
程的形式不同。但各种形式的力法方程表达的物理意义的实质是相 同的。在力法方程的等号左边表示的是:基本结构上在各种因素作 用下引起的某一多余力方向上的位移;而等号右边表示的是:原结 构在此方向上的位移。
度升图高a所t2 示C,为用两力次法超计静算定其刚内架力,的设方各法杆与外支侧座温移度动升时高的t1情C,况内相侧类温似。 首先选取基本结构,设去掉支座C处的两个多余约束,代之以多余 未知力X1、X2,得到基本结构如图b所示。列出力法方程为
11X1 12 X 2 1t 0 21X1 22 X 2 2t 0
式中系数计算和前面相同。
目录
力法\支座移动和温度改变时超静定结构的内力计算
自由项 it(i = 1,2)表示基本结构上C点处由温度改变所引起 的Xi方向上的位移,可按十三章中介绍的位移计算公式求得,即
it
() l FNilt0ds
() Mil tds
lh
(a)
当t0、t 、h、 l 为常数时,则上式可写成
侧截温面度形降心低轴5为C对,称各轴杆,材截料面的高线度膨h胀= 0系.4数m。为试用l ,力弯法曲计刚算度,E并I为绘常制数,
内力图。
【解】 此刚架为一次超静定结构,取基本结构如图b所示。建
立力法方程为
11Χ 11t 0
目录
力法\支座移动和温度改变时超静定结构的内力计算
绘出 M1 、FN1 图,分别如图c、d所示。
it
lt0 ANi
l
t h
AMi
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 2 + α − 2.5 × ( × l ) − 10 × ( × l ) l l = 100α − 22.5α = 77.5α
重庆大学土木工程学院®
All Rights Reserved
代入典型方程, 代入典型方程,可得
X1 = −
A
77.5EIα/l B 77.5EIα/l 77.5EIα/l C 77.5EIα/l D
3iθ/3 A B 3iθ/3
M
AB
= 3i θ
3iθ
M图 图
All Rights Reserved
重庆大学土木工程学院®
2)若θ = 0,并令∆AB = a,则原体系如图 ) 所示, , ,则原体系如图7-26a所示,相应的 所示 M图如图 图如图7-26b所示。A点的 M AB = 3EI × ∆AB ,若再引入符 所示。 点的 图如图 所示 l l 号 EI B ∆ AB A β= 弦转角β 弦转角β ∆AB l 称为杆AB的弦转角, 称为杆 的弦转角,则
l3 X 1 − θ l = −a 3EI
l a X1 + = θ 3EI l
第三种解法
4l a X 1 − 2(θ − ) = 0 3EI l
一般来说, 一般来说,凡是与多余未知力相应的支座位移参数 都出现在力法典型方程的右边项中, 都出现在力法典型方程的右边项中,而其它的支座 位移参数都出现在左边的自由项中。 位移参数都出现在左边的自由项中。
M AB ∆ AB = 3i = 3iβ l
l
(6)上述计算结果表明:在支 上述计算结果表明: 上述计算结果表明 座位移时, 座位移时,超静定结构将产生 内力和反力, 内力和反力,其内力和反力与 各杆件刚度的绝对值成正比 绝对值成正比。 各杆件刚度的绝对值成正比。
All Rights Reserved 重庆大学土木工程学院®
All Rights Reserved 重庆大学土木工程学院®
第二,对支座移动问题,力法方程右端项不一定为零。 第二,对支座移动问题,力法方程右端项不一定为零。 当取有移动的支座约束力为基本未知力时, 当取有移动的支座约束力为基本未知力时,∆i≠0,而是 , ∆i=Ci 第三,计算最后内力的叠加公式不完全相同。 第三,计算最后内力的叠加公式不完全相同。 内力的叠加公式不完全相同 由于基本结构(是静定结构)上支座移动、温度变化时 由于基本结构(是静定结构)上支座移动、 均不引起内力,因此内力全是由多余未知力引起的。 均不引起内力,因此内力全是由多余未知力引起的。最 后弯矩叠加公式为
θ
A C B a l/2 l
θ
l/2
(1)第一种解法 : 第一种解法
取支座B的竖向反力为多余未知力 取支座 的竖向反力为多余未知力X1,其 的竖向反力为多余未知力 力法方程为
θ
θ
δ 11 X 1 + ∆1c = −a
θ
X1
a
基本体系之一
其中
θ
∆1c
∆1c = −∑ FR c = −(l × θ ) = −θ l
δ 11
∆1t
77.5 EIα =− l
(
Hale Waihona Puke )如图所示。 最后弯矩图 M = M 1 X 1 ,如图所示。
M图 图
由计算结果可知,在温度变化时, 由计算结果可知,在温度变化时,超静定结构的内力与反力与各 杆件刚度的绝对值成正比 因此, 刚度的绝对值成正比。 杆件刚度的绝对值成正比。因此,加大截面尺寸并不是改善自内 力状态的有效途径。另外,对于钢筋混凝土梁, 力状态的有效途径。另外,对于钢筋混凝土梁,要特别注意因降 温可能出现裂缝的情况(对超静定梁而言, 温可能出现裂缝的情况(对超静定梁而言,其低温一侧受拉而高 温一侧受压)。 温一侧受压)。
δ 11 X 1 + ∆1t = 0
A +15℃ ℃ -15℃ ℃ B A l +15℃ ℃ -15℃ ℃ B
-10℃ +15℃ ℃ ℃ +15℃ ℃ +5℃ ℃ l
-10℃ +15℃ ℃ ℃ X1 +15℃ ℃ +5℃ ℃
C l
D
C X1
D
基本体系
All Rights Reserved
重庆大学土木工程学院®
7.5
用力法计算超静定结构在支座移动和温度变化时的内力
对于静定结构,在支座移动、温度变化等非荷载因素作用下, 对于静定结构,在支座移动、温度变化等非荷载因素作用下,可 发生自由变形,但并不引起内力;而对于超静定结构, 发生自由变形,但并不引起内力;而对于超静定结构,由于存在 多余约束,在非荷载因素作用下,一般会产生内力, 多余约束,在非荷载因素作用下,一般会产生内力,这种内力称 自内力。 为自内力。
All Rights Reserved 重庆大学土木工程学院®
(5)特例 特例 1)若a = 0,则原体系如图示,相应的 图如图所示。 ) 图如图所示。 ,则原体系如图示,相应的M图如图所示 A 点的 M AB = 3EI θ ,若引入符号 若引入符号
l
θ
A
EI i= l
θ
EI l
B
称为杆件的线刚度则 称为杆件的线刚度则 线刚度
n
ij
X j + ∆ic = C i
δij为柔度系数
Ci,表示原结构在Xi方向的实际位移 表示原结构在
∆ic,表示基本结构在支座移动作用下在 i方向的位移 表示基本结构在支座移动作用下在X
All Rights Reserved 重庆大学土木工程学院®
为常数, 【例7-9】图示单跨超静定梁 ,已知 为常数,左端支座转动角度为θ , 】图示单跨超静定梁AB,已知EI为常数 右端支座下沉位移为a,试求在梁中引起的自内力。 右端支座下沉位移为 ,试求在梁中引起的自内力。 此梁为一次超静定, 此梁为一次超静定,以下分别采用 三种基本体系求解 。
用力法计算自内力时, 用力法计算自内力时,其基本原理和分析步骤与荷载 作用时相同,只是具体计算时,有以下三个特点: 作用时相同,只是具体计算时,有以下三个特点: 第一,力法方程中的自由项不同。 第一,力法方程中的自由项不同。 这里的自由项, 这里的自由项,不再是荷载引起的∆iP,而是由支座移 动或温度变化等因素引起基本结构多余未知力方向上 的位移∆ic或∆it等。
∆it = ∑ αt 0 AFN = ∑ FNαt 0 l
代之以杆件制作误差(或材料收缩与徐变)时的自由 代之以杆件制作误差(或材料收缩与徐变) 项计算公式
∆iZ = ∑ FN ∆l
可看出, 可看出,周边的约束刚度对上述非荷载因素所引起 的结构的自内力有很大的影响。 的结构的自内力有很大的影响。
All Rights Reserved 重庆大学土木工程学院®
M = ∑ M i xi
All Rights Reserved 重庆大学土木工程学院®
7.5.1 支座移动时的内力计算
计算支座移动引起n次超静定结构的内力时, 计算支座移动引起 次超静定结构的内力时,力法方程 次超静定结构的内力时 中第 i个方程的一般形式可写为 个方程的一般形式可写为
∑δ
j =1
2
M1 图
X1
1
FRB =
由此可得
X1 =
All Rights Reserved
2 l
3 EI a (θ − ) 2l l
重庆大学土木工程学院®
a 3EI (θ − ) l l
M图 图
以上选取三种不同基本结构,得出三个不同的力法方程: 以上选取三种不同基本结构,得出三个不同的力法方程: 第一种解法 第二种解法
θ
X1
a
M = M1 X1
基本体系之一
θ θ ∆1c
3EI a (θ − ) l l
All Rights Reserved
M图 图
X1
FRA = 1
l
重庆大学土木工程学院®
M1 图
X1=1
(2)第二种解法 第二种解法
X1
取支座A的反力偶作为多余未知力 取支座 的反力偶作为多余未知力X1, 的反力偶作为多余未知力 其力法方程为
All Rights Reserved
重庆大学土木工程学院®
例7-10】试作图示刚架在温度改变时所产生的 图。各杆 】试作图示刚架在温度改变时所产生的M图 截面为矩形,高度h=l/10,线膨胀系数为 。设EI=常数 截面为矩形,高度 ,线膨胀系数为a。 常数 此结构为一次超静定刚架, 解 :此结构为一次超静定刚架,取基本体系 此结构为一次超静定刚架 如图所示。 如图所示。力法方程为
δ 11 =
All Rights Reserved
1 l M 12 dx = EI ∫ 3EI
重庆大学土木工程学院®
3
FRA = 1
l
M1 图
X1=1
θ
得 由此求得
l X 1 − θ l = −a 3 EI
3
A
θ
l/2 l
C
B a l/2
X1 =
3EI a (θ − ) l l2
θ
弯矩叠加公式为: 弯矩叠加公式为:
θ
基本体系之二
a
δ 11 X 1 + ∆1c = θ
其中
1 a ∆1c = −∑ FR c = −( × a) = l l l δ 11 =
3EI
X1=1
∆1c
a
力法方程
l a X1 + = θ 3EI l 3EI a (θ − ) X1 = l l
重庆大学土木工程学院®
1 X1
M 1图
FRB =
1 l
与第一种解法所作M图完全相同。 与第一种解法所作 图完全相同。 图完全相同