维纳滤波基本概念
维纳滤波的应用综述

基于维纳滤波的应用综述一、维纳滤波概述维纳(wiener)滤波是用来解决从噪声中提取信号问题的一种过滤(或滤波)的方法。
实际上这种线性滤波问题,可以看成是一种估计问题或一种线性估计问题。
一个线性系统,如果它的单位样本响应为h (n ),当输入一个随机信号x (n ),且x (n )=s (n )+v (n ) (1.1)其中s(n)表示信号,v(n)表示噪声,则输出y(n)为()=()()my n h m x n m -∑ (1.2)我们希望x (n )通过线性系统h (n )后得到的y (n )尽量接近于s (n ),因此称y (n )为s (n )的估计值,用^s 表示,即 ^()()y n s n = (1.3)实际上,式(1.2)的卷积形式可以理解为从当前和过去的观察值x (n ),x (n -1),x (n -2)…x (n -m ),来估计信号的当前值^()s n 。
因此,用h (n )进行过滤的问题可以看成是一个估计问题。
由于现在涉及的信号是随机信号,所以这样一种过滤问题实际上是一种统计估计问题。
维纳滤波器的优点是适应面较广,无论平稳随机过程是连续的还是离散的,是标量的还是向量的,都可应用。
对某些问题,还可求出滤波器传递函数的显式解,并进而采用由简单的物理元件组成的网络构成维纳滤波器。
维纳滤波器的缺点是,要求得到半无限时间区间内的全部观察数据的条件很难满足,同时它也不能用于噪声为非平稳的随机过程的情况,对于向量情况应用也不方便。
因此,维纳滤波在实际问题中应用不多,更多的是基于维纳滤波器发展而来的滤波方式。
二、基于维纳滤波的应用2.1在飞机盲降着陆系统中的应用盲降着陆系统(ILS)又译为仪表着陆系统。
它的作用是由地面发射的两束无线电信号实现航向道和下滑道指引,建立一条由跑道指向空中的虚拟路径。
飞机通过机载接收设备确定自身与该路径的相对位置,使飞机沿正确方向飞向跑道并且平稳下降高度。
维纳滤波原理
维纳滤波原理维纳滤波是一种信号处理中常用的滤波方法,它的原理是基于最小均方误差准则,通过对信号和噪声的统计特性进行分析,设计一种能够最小化系统输出与期望输出之间均方误差的滤波器。
维纳滤波在图像处理、语音处理、雷达信号处理等领域都有广泛的应用,下面我们来详细了解一下维纳滤波的原理和应用。
首先,我们需要了解维纳滤波的基本模型。
维纳滤波的输入信号可以表示为s(n),噪声信号表示为v(n),系统输出信号表示为x(n),那么维纳滤波器的输出可以表示为:x(n) = w(n) s(n) + v(n)。
其中,表示卷积操作,w(n)表示滤波器的权值。
维纳滤波的目标是设计一个滤波器,使得系统输出信号x(n)与期望输出信号d(n)之间的均方误差最小,即最小化误差信号e(n)的均方值E[e^2(n)]。
根据最小均方误差准则,我们可以得到维纳滤波器的最优解为:w(n) = R_ss^(-1) p_s。
其中,R_ss表示输入信号s(n)的自相关矩阵,p_s表示输入信号s(n)与期望输出信号d(n)的互相关向量。
这个公式描述了维纳滤波器的权值与输入信号和期望输出信号的统计特性之间的关系。
维纳滤波器的设计需要对输入信号和噪声信号的统计特性有一定的了解。
通常情况下,输入信号和噪声信号被假设为高斯分布,因此可以通过它们的均值和方差来描述它们的统计特性。
在实际应用中,我们可以通过对信号和噪声的样本进行统计分析,估计它们的均值和方差,进而设计维纳滤波器。
除了基本的维纳滤波器设计原理,维纳滤波还有一些扩展应用。
例如,当输入信号和噪声信号的统计特性未知或难以估计时,我们可以通过自适应滤波的方法来实现维纳滤波。
自适应滤波器可以根据系统的实时输入信号和输出信号来动态地调整滤波器的权值,以适应信号和噪声的变化特性,从而实现更好的滤波效果。
维纳滤波在图像处理中有着广泛的应用。
在数字图像处理中,图像通常会受到噪声的影响,例如加性高斯噪声、椒盐噪声等。
维纳滤波基本概念
Wiener 滤波概述Wiener 滤波器是从统计意义上的最优滤波,它要求输入信号是宽平稳随机序列,本章主要集中在FIR 结构的Wiener 滤波器的讨论。
由信号当前值与它的各阶延迟({n x )n ,§3.1从估计理论观点导出Wiener 滤波FIR 结构(也称为横向)的Wiener 滤波器的核心结构如图4所示. 图4.横向Wiener 滤波器FIR 结构的Wiener 是一个线性Beyesian 估计问题.为了与第2讲中估计理论一致,假设信号,滤波器权值均为实数由输入)(n x 和它的1至(M-1)阶延迟,估计期望信号)(n d ,确定权系数}1,0,{-=M i w i 使估计误差均方值最小,均方误差定义为:xx R 这里线性0w或a1) 波可能会达到更好结果。
2) 在联合高斯条件下,Wiener 滤波也是总体最优的(①从Bayesian 估计意义上讲是这样,②要满足平稳条件) 3) 从线性贝叶斯估计推导过程知,在滤波器系数取非最优的w 时,其误差性能表示:它是w 的二次曲面,只有一个最小点,0w w =时,m in )(J w J =§3.2维纳滤波:从正交原理和线性滤波观点分析Wiener 滤波器 Wiener 滤波器是一个最优线性滤波器,滤波器核是IIR 或FIR 的。
导出最优滤波器的正交原理,并从正交原理出发重新导出一般IIR 。
=∑∞=--0*)(][k kk n x w n d均方误差是:{}][*][n e n e E J ={}2|][|n e E = 设权系数:k k k jb a w +=定义递度算子Tk ],,[10 ∇∇∇=∇.其中k k k k b ja w ∂∂+∂∂=∂∂=∇符号J ∇是递度算子作用于J ,其中第k 项为:k k k b Jja J J ∂∂+∂∂=∇要求由J 得∇[nje J k由[e a k∂k 代入J k ∇表达式整理得:]][*][[2n e k n x E J k --=∇当0=∇Jk ,1,0=k 时,J 达到最小。
维纳滤波和谱减法降噪
维纳滤波和谱减法降噪
维纳滤波(Wiener Filtering)和谱减法降噪(Spectral Subtraction)是两种常见的信号处理技术,用于在信号中降低噪声水平。
一、维纳滤波(Wiener Filtering):
维纳滤波是一种线性滤波器,通过估计信号和噪声的功率谱密度,并根据它们的关系对信号进行滤波。
它的基本思想是在频率域上对信号进行加权,使得期望的信号与噪声之间的比率最大化。
维纳滤波在不同噪声分布和信号特性下的表现较好,但需要对信号和噪声的统计特性有一定的先验知识。
二、谱减法降噪(Spectral Subtraction):
谱减法是一种基于频域的降噪方法,它通过对信号的频谱进行估计,并减去估计的噪声频谱来降低噪声水平。
该方法假设信号和噪声在频率域上是线性可分的,因此可以通过减去估计的噪声频谱来增强信号。
谱减法是一种简单且有效的降噪方法,但在信号与噪声之间存在重叠的频率范围时,可能会导致信号失真。
这两种方法在实际应用中常用于语音信号处理、图像处理、雷达信号处理等领域,以降低信号中的噪声水平,提高信号的质量和清晰度。
选择合适的方法取决于信号的特性以及对噪声的先验知识。
维纳滤波推导
维纳滤波推导维纳滤波是一种常用的信号处理方法,广泛应用于图像处理、语音处理和通信领域等。
本文将以维纳滤波推导为主题,介绍维纳滤波的基本原理和推导过程。
维纳滤波是一种最小均方误差滤波方法,通过对信号和噪声进行数学建模,找到最优的滤波器,以实现信号的恢复和噪声的抑制。
维纳滤波的基本思想是在频域将信号和噪声进行分离,然后对信号进行加权平均,以减小噪声的影响。
我们需要对信号和噪声进行数学建模。
假设原始信号为s(t),观测到的信号为x(t),噪声为n(t),则观测信号可以表示为x(t)=s(t)+n(t)。
我们假设信号和噪声都是宽平稳过程,并且它们在频域上是相互独立的。
接下来,我们将信号和噪声的频谱进行分析。
假设信号和噪声的功率谱密度分别为S(f)和N(f),则观测信号的功率谱密度为X(f)=S(f)+N(f)。
维纳滤波的目标是找到一个滤波器H(f),使得滤波后的信号Y(f)尽可能接近信号的功率谱密度S(f),即最小化信号和滤波后信号的均方误差。
根据维纳滤波的最小均方误差准则,我们可以得到维纳滤波器的频率响应函数为H(f)=S(f)/(S(f)+N(f))。
这个频率响应函数可以看作是对信号和噪声进行加权平均的结果,信号的权重比例取决于信号和噪声的功率谱密度。
我们可以通过将滤波器的频率响应函数H(f)与观测信号的频谱X(f)进行卷积运算,得到滤波后的信号的频谱Y(f)=H(f)*X(f)。
然后,我们可以通过傅里叶逆变换将滤波后的信号从频域转换到时域,得到滤波后的信号y(t)。
维纳滤波的推导过程比较复杂,需要涉及一些数学和信号处理的知识。
在实际应用中,可以利用现有的维纳滤波算法和工具包,直接对观测信号进行滤波处理,而无需进行推导。
维纳滤波在图像处理中常用于去噪,可以有效地提高图像的质量和清晰度。
在语音处理和通信领域中,维纳滤波可以用于语音增强和信号恢复,提高通信质量和语音识别的准确性。
维纳滤波是一种常用的信号处理方法,通过对信号和噪声进行数学建模,找到最优的滤波器,以实现信号的恢复和噪声的抑制。
第八章 维纳滤波
求解此式,可得到最小平方反滤波的滤波因子 h(n) 。然而求 h(n) 值是根据 rpp(i),为了计算rpp(i)就得确切知道干扰系统的冲激响应p(n),这是一个难题。 在许多情况下,希望由x(n)=p(n)*s(n)以及对p(n)的若干特征来寻求p(n)的估计 值。下面给出一种由x(n)计算rpp(i)的近似方法。
n n n n
期望输出s(n)与输入x(n)的互相关函数为
n n
rsx (k ) s(n k ) x(n) s(n k )[s(n) n(n)] rss (k )
如果以 Rss(ejω) 和 Rnn(ejω) 分别表示 rss(k) 和 rnn(k) 的频谱,即分别为 s(n) 和 n(n) 的功率谱,则在对维纳滤波的时间范围不加限制的情况下,由式H(ejω)=Rzs(ejω)/ Rxx(ejω),可以得到维纳滤波器的频率响应应为:
▲ 回声鸣震问题 【例1】
设信号序列为 {s(n)},经过延迟 n0,其一次回声序列为 {rs(n-n0)},二次回声 序列为 {r2s(n-2n0)} ,三次回声序列为 {r3s(n-3n0)} ,等等。其中 r 为反射因子, |r|≤1。滤波器的输入x(n)是信号序列与回声序列的叠加,即
第八章 维纳滤波
Q 0, 0 n N h(n)
x(n) 的 自 相关函数
λ=nT,T 是 采样周期 z(n) 与 x(n) 的 互相关函数
N Q 2[ h(k ) x(n k ) z (n)]x(n h(k ) x(n k ) x(n ) 2 z (n) x(n ) 0
维纳滤波(最小均方滤波)
(3-10)
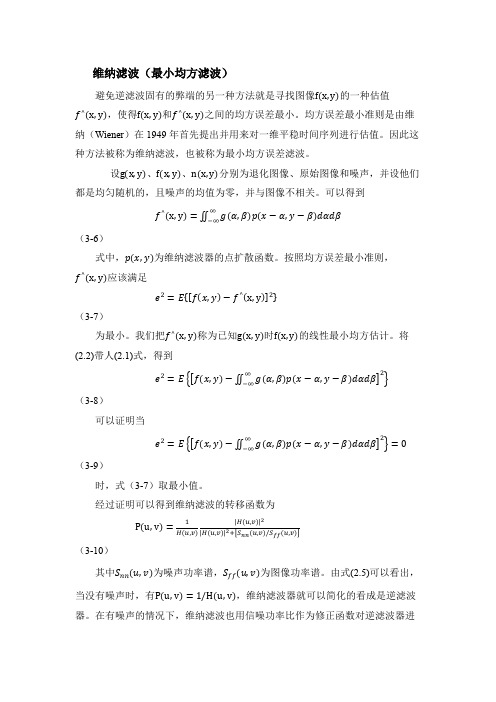
其中������������������ (������, ������ )为噪声功率谱,������������������ (������, ������)为图像功率谱。由式(2.5)可以看出, 当没有噪声时,有P u, v = 1/H(u, v),维纳滤波器就可以简化的看成是逆滤波 器。 在有噪声的情况下, 维纳滤波也用信噪功率比作为修正函数对逆滤波器进行 了修正,但它在均方误差最小的意义上提供最佳恢复。 通常将噪声假设为白噪声,即噪声功率谱������������������ (������, ������ )为常数,若������������������ (������, ������)在频 谱空间上高频区下降比������������������ (������, ������ )快得多,这种假设就近似正确。于是可以认为 ������������������ ������, ������ = ������������������ 0,0 = 常数(3-11) 如果噪声时各态历经的,可以用一幅噪声图像进行计算从而求得������������������ 0,0 ,
∞ ������(������ , ������ )������(������ −∞
− ������, ������ − ������ )������������������������(3-6)
式中,������(������, ������)为维纳滤波器的点扩散函数。按照均方误差最小准则,������ ^ x, y 应该满足 ������ 2 = ������ ������ ������, ������ − ������ ^ x, y
∞ ������(������ , ������)������(������ −∞ ∞ ������(������ , ������)������(������ −∞
维纳滤波概述
E[ x(t ) h(t ) y (t )d ]2
0
E[ x(t )]2 2 h( )( E[ y (t ) y ( )]d
0
h( )d h( ) E[ y (t ) y (t )]d
0 0
Rxx (0) 2 h( ) Ryx ( )d
E[e 2 (n)] lim
(2-25)
1 T 2T
T
T
(n) s (n)]2 dn [s
滤波器在n时刻复现信号s(n)显然是滤波问题。这是一种简单的过滤,滤除 噪声v(n)是唯一的目的。 但输出在时间上的简单的超前或者滞后,都不失为线性
(n a) ,这显然是一种超前的情况,输 滤波问题。在n时刻,滤波器输出如果为 s (n a) 是 s(n a) 的估计值,它比x(n)超前了 时间。这个时候滤波器所完成 出s
2 J1 2 J 2 0( 3 )
(2-15) 则将导致
J[ h h( t )] J [ o p t( t ) oh p t (t ) ]
(2-16) 这明显与最佳冲击响应将使均方误差最小的假设相矛盾。所以,我们只能取
J1 =0,即满足式(2-11)。由式(2-13)知,若使 J1 =0成立,则必须使式(2-13)中的方
第 2 章 维纳滤波理论
2.1 维纳滤波的概述
维纳 (Wiener) 滤波是用来解决从噪声中提取信号问题的一种过滤 (或滤波) 的方法。 实际上这种线性的滤波问题,可以看成是一种估计问题或是一种线性估 计问题。 维纳滤波器是一种基于最小均方误差准则下的估计滤波器。 滤波器的输入包 括有真实信号值x(t)和干扰噪声w(t),信号值与噪声是统计独立的,则两者的合 成输入信号是
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Wiener滤波概述Wiener滤波器是从统计意义上的最优滤波, 它要求输入信号是宽平稳随机序列, 本章主要集中在FIR结构的Wiener滤波器的讨论。
由信号当前值与它的各阶延迟)}1(,),1(),({+--MnxnxnxΛ,估计一个期望信号)(nd,输入信号)(nx是宽平稳的,)(nx和)(nd是联合宽平稳的, 要求这个估计的均方误差最小。
在本章中,不特别说明, 假设信号是零均值.Wiener滤波器的几个实际应用实例如下:①通信的信道均衡器。
图1. 信道均衡器的结构示意②系统辨识:图2. 线性系统辨识的结构③一般结构:图3. Wiener 滤波器的一般结构Wiener 滤波器的目的是求最优滤波器系数o w ,使⎥⎦⎤⎢⎣⎡-==22)(ˆ)(]|)([|)(n d n d E n e E n J 最小。
§3.1 从估计理论观点导出Wiener 滤波FIR 结构(也称为横向)的Wiener 滤波器的核心结构如图4所示.图4. 横向Wiener 滤波器FIR 结构的Wiener 是一个线性Beyesian 估计问题.为了与第2讲中估计理论一致,假设信号,滤波器权值均为实数由输入)(n x 和它的1至(M-1)阶延迟,估计期望信号)(n d ,确定权系数}1,0,{-=M i w i Λ使估计误差均方值最小,均方误差定义为:这里估计)(ˆn d 写为:∑-=-=10)()(ˆM k k k n x w n d除了现在是波形估计外,与线性Bayesian 估计一一对应。
xx R R (零均值假设)这里)])()([)((n d k n x E k r xd -=-, Wiener 滤波与线性Bayesian 估计变量之间具有一一对应关系, 设最优滤波器系数为0w ,由线性Bayesian 估计得到Wiener 滤波器系数对应式:上式后一个方程称为Wiener-Hopf 方程,或 xd x xx r R R R 101--=⇒=w θa结论:1) Wiener 滤波器是线性FIR 滤波器中的最优滤波器,但非线性滤波可能会达到更好结果。
2) 在联合高斯条件下,Wiener 滤波也是总体最优的(①从Bayesian 估计意义上讲是这样,②要满足平稳条件)3) 从线性贝叶斯估计推导过程知,在滤波器系数取非最优的w 时,其误差性能表示:它是w 的二次曲面,只有一个最小点,0w w =时,m in )(J w J =§3.2维纳滤波:从正交原理和线性滤波观点分析Wiener 滤波器Wiener 滤波器是一个最优线性滤波器,滤波器核是IIR 或FIR 的。
导出最优滤波器的正交原理, 并从正交原理出发重新导出一般的Wiener 滤波器方程推导适应于IIR 和FIR 的一般结论,然后分别讨论FIR 和IIR 。
讨论一般的复数形式。
·ΛΛ],[,],0[nxx输入过程。
·Λ,,,21www滤波器系数,(权系数)·希望的响应d[n]·输出误差:][][][nyndne-=·正交性原理对复数据情况,推导一般结论,实数据是特例。
∑∞=-=0*) (][kkknxwny][][][nyndne-==∑∞=--*)(][kkknxwnd均方误差是:{}][*][neneEJ={}2|][|n e E=设权系数: k k k jb a w +=定义递度算子T k ],,[10ΛΛ∇∇∇=∇. 其中k k k k b j a w ∂∂+∂∂=∂∂=∇ 符号J ∇是递度算子作用于J ,其中第k 项为:k k k b J j a J J ∂∂+∂∂=∇要求Λ,,10w w 的值, 使得J 最小,即 0=∇J等价:0=∇J k Λ2,1,0=k由]}[*][{n e n e E J =得:⎥⎦⎤⎢⎣⎡∂∂+∂∂+∂∂+∂∂=∇][][*][*][][][*][*][njebnenjebneneaneneaneEJkkkkk由∑∞=--=*][][][kkknxwndne得到:][][knxanek--=∂∂][][knjxbnek-=∂∂代入J k∇表达式整理得:]][*][[2neknxEJk--=∇当=∇J kΛ,1,0=k时,J达到最小。
设J达最小时,用][,new表示权系数和误差e[n],且minJJ=则有:]][][[*=-neknxE,Λ,1,0=k以上为正交性原理,达到最优滤波时,误差和输入正交。
推论:]][][[*=nenyE·维纳-霍夫方程(Wiener-Hopf)由正交性原理得][*][*][=⎥⎦⎤⎢⎣⎡⎪⎭⎫⎝⎛---∑∞=iiinxwndknxEΛ,1,0=k定义:]][*][[][inxknxEkirx--=-]][*][[][ndknxEkrxd-=-有∑∞=-=-][][ixdxikrkirwΛ,1,0=k这就是Wiener-Hopf方程,解此方程,可得到最优权{}iw0。
对于M阶FIR滤波器,(横向滤波器)Wiener-Hopf方程变为:∑-=-=-100][][Mixdxikrkirw,1,1,0-=MkΛ·矩阵形式:令TMnxnxnxn]]1[,],1[],[[][+--=Λx和]][][[n n E R H x x =⎪⎪⎪⎪⎪⎭⎫ ⎝⎛----=]0[],2[*],1[*]2[],0[],1[*]1[],1[],0[r M r M r M r r r M r r r ΛM ΛΛ Winer-Hopf 方程:xd r w =0R 这里T M w w w w ],,,[100201000-=Λw 解方程求得:xd r w 10-=R·最小均方误差:在达最优时,][0n y 也写成]|[ˆn X n d ,表示由ΛΛ],1[],[-n x n x 张成的空间对d[n]的估计(最优线性估计)。
]|[ˆ][][][][00n X n d n d n y n d n e -=-= 也可以写成: ]|[][][0n X n d n e n d +=由]|[ˆnXnd和][0ne正交性得:[]2ˆ22][dodneEσσ+=2ˆm in dJσ+=即:2ˆ2m in ddJσσ-=由∑-=-=1*][]|[ˆMkknknxwXnd][nH xw=得]]|[*ˆ]|[ˆ[2ˆnndXndXndE=σ]][][[wxxw nnE HH=则2ˆ2m in ddJσσ-=2w Hd xdr-=σxdxdrr12--=RHdσ·误差性能表面由∑-=--=1*][][][M k kk n x w n d n e 直接代入]][*][[n e n e E J =整理得:∑∑∑∑-=-=-=-=-⋅+----=1011010**2][)(*)(M k M k M k M i x i kxd k xdk dk i r w w k r w k r w J σ由上式,可以看出,J 是W k 的二次曲面,是碗状曲面,碗口向上,J min 在碗底,其实,由上式直接对w k 求导,得到一组方程,正是wiener-Hopf 方程。
矩阵形式w w w w R J HHHd+--=xd xd r r w 2)(σ在x d r 10-=R w 时,达最小,xd xd r r w 12min )(min --==R J J Hdwσ 性能表面)(w J 可以写成:)()()(00min w w w w w --+=R J J H由于HQQ R Λ= 故)()()(00min w w w w w -Λ-+=HH Q Q J J令)(0w w v -=HQ通过坐标变换,得到如上规范形式,对于一个给定min J J ≠, 有:∑==-Mk kk v J J 12m in1||λ 这是超椭圆,kλ1为其一个轴。
数值例子1:有一信号][n s ,它的自相关序列为ksk r ⎪⎭⎫⎝⎛=212710][,被一白噪声所污染,噪声方差为3/2,被污染信号][n x 作为Wiener滤波器的输入,求2阶FIR 滤波器使输出信号是][n s 的尽可能的恢复。
解:本题中,][][][n v n s n x +=, ][][n s n d =。
由于只需要2阶滤波器设计,因此xd r w 1-=R o =[]T1186.0,3359.02240.01186.03359.0212710271027102min=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⋅-=-=To H d J w r x d σ #数值例子2:①希望响应][n d 是一个AR(1)过程,8458.011=a ,][1n v 是白噪声,27.021=σ, 由白噪声驱动的产生该过程的传输函数为:118458.011)(-⋅+=ZZ H ②][n d 经过了一个通信信通,信道的传输函数为)(2Z H ,并加入了白噪声1.022=σ即: 通道模型如图5所示:图5. 通道模型③求解:一个二阶FIR 结构Wiener 滤波器,目的是由x[n]尽可能恢复d [n ] 解:①][n d 是一个)1(AR 过程,27.0,1)(21111=+=-σZ a Z A②在][][][2n v n s n x +=中,][n s 是一个二阶)2(AR 过程,相当于)()()(21z H z H z H =由二阶)(z AR 参数,确定)(k r s , 由Yule-walker 方程:反解)1(),0(s s r r .得由上确定s[n]的自相关矩阵为:⎪⎪⎭⎫⎝⎛=15.05.01s R 但:I R R s x ⋅+=22σ1.0100115.05.01⨯⎪⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛=⎪⎪⎭⎫⎝⎛=1.15.05.01.1 ③求][k r xd{}][][][n d k n x Ek r xd -=由:][]1[9458.0][n d n s n s =--, 和][][][2n v n s n x += 代入上式得:]1[9458.0][][--=krkrkrssxd故5272.0])1[9458.0(]0[]0[=-⨯-+=ssxdrrr最优系数最小均方误差:性能表面规范误差性能表面解=-IRλ0)5.0()1.1(1.15.05.01.122=--⇒=--λλλ这是一个随圆,主轴212min⎪⎪⎭⎫⎝⎛-λJJ,副轴211min⎪⎪⎭⎫⎝⎛-λJJ·IIR Wiener 滤波器考虑Wiener-Hopf 方程在IIR 滤波器时的情况,为简单,先讨论非因果IIR 滤波器的设计式。
为简单,考虑实信号和实滤波器系数的情况。
在非因果条件下,Wiener-Hopf 方程改写为上式两边取z 变换,得或)()()(z z z H x xd ΓΓ=这里)(z H 是滤波器冲激响应(权系数)的z 变换,)(z x Γ是][k r x 的z 变换,)(z xd Γ是][k p 的z 变换。