workbench位移约束的类型
ANSYS Workbench 后处理

一、前处理技术
1.2.2 约束类型 固定约束(Fixed Support)——
固定约束可以加载于实体、顶点、边缘、面、 壳或者梁上,从而约束相对应单元的自由度。
一、前处理技术
1.2.2 约束类型 位移约束(Displacement)——
在加载给定位移时要注意: -可以在顶点、体边缘或面上加载已知位移 -允许在x、y和z方向给予强制位移 -当输入“0”值时,代表此方向上被约束 -如果不设定某个方向的值则意味着实体在这个方向上自由运动
是通过惯性力施加到结构上的,而惯性力的方向
与所施加的加速度方向恰好相反,因为惯性力是
阻止加速度所产生的变化的,一定要牢记这一
点!!! 通过鼠标选中
来定义加速度
通过鼠标选中 球重力加速度
通过鼠标选中 ,注意缺省单位为rad/s
来定义标准地 来定义旋转速度
一、前处理技术
1.2.1 载荷类型
➢ 结构载荷(Inertial) 是作用在系统或部件结构上的力或力矩。力载
Selection 图标 –新的命名集将出现在Outline Tree(大纲树)下。
•提示: –在一个指定的命名选择集里只允许出现一种实体类型。例如,在相同的命 名集里就不能同时出现点和边。
一、前处理技术
附: 命名选择集
•在很多细节窗口中可以直接引用命名选择集: •示例(压载荷):
–在Details of Pressure中,把Method由Geometry Selection换成 Named Selection
(1)双击项目A中的A2栏Engineering Data项,进入下图所示 的材料参数设置界面,在该界面下即可进行材料参数设置。
一、前处理技术
添加材料库
workbench 转子动力学 远端位移约束

workbench 转子动力学远端位移约束workbench 转子动力学远端位移约束一、引言在工程领域中,转子动力学是一门研究转子系统在旋转过程中的动力学行为的学科。
它的研究对象主要是转子系统在高速旋转时产生的振动问题。
而在转子系统的设计和分析过程中,远端位移约束是一个关键的概念和技术。
本文将深入探讨workbench 转子动力学中远端位移约束的意义、作用及其在实际应用中的具体应用。
二、远端位移约束的意义和作用远端位移约束是指通过在转子系统的远端施加一定的约束条件,限制转子在旋转过程中的振动范围。
它的主要作用是提高转子系统的稳定性和可靠性。
远端位移约束可以避免转子在高速旋转时产生过大的位移和振动,减少系统的振动损失和能量损耗,提高系统的运行效率和寿命。
三、workbench 转子动力学中的远端位移约束在workbench 转子动力学分析中,远端位移约束是一种常用的分析技术。
它通过设置恰当的边界条件,限制转子在工作过程中的振动幅度来保证系统的稳定性和正常运行。
1. 边界条件设置在workbench 转子动力学分析中,远端位移约束主要通过两种方式实现。
一种是通过添加支撑结构或支撑件对转子进行约束,阻止其在工作过程中出现过大的位移和振动。
另一种是通过设置特定的边界条件来控制转子的位移和振动范围。
这些边界条件包括但不限于几何约束、速度约束和加速度约束等。
2. 系统稳定性分析通过远端位移约束技术,在workbench 转子动力学分析中可以进行系统的稳定性分析。
通过对转子系统进行稳定性分析,可以确定转子系统在不同工况下的稳定运行范围,为系统的设计和改进提供参考依据。
3. 振动控制和优化设计在workbench 转子动力学分析中,远端位移约束可以用于振动控制和优化设计。
通过合理设置远端位移约束,可以降低转子系统在高速旋转时产生的振动幅度,减少系统的振动损失和能量耗散,提高系统的运行效率和性能。
四、个人观点和理解对于转子动力学中的远端位移约束,我认为它是一项非常重要的技术和方法。
workbench荷载 约束 接触定义相关概念解释

目录workbench荷载的含义 (1)Workbench约束的含义 (3)接触 (4)workbench荷载的含义1)方向载荷对大多数有方向的载荷和支撑,其方向多可以在任意坐标系中定义:–坐标系必须在加载前定义而且只有在直角坐标系下才能定义载荷和支撑的方向.–在Details view中, 改变“Define By”到“Components”. 然后从下拉菜单中选择合适的直角坐标系.–在所选坐标系中指定x, y, 和z分量–不是所有的载荷和支撑支持使用坐标系。
2)加速度(重力)–加速度以长度比上时间的平方为单位作用在整个模型上。
–用户通常对方向的符号感到迷惑。
假如加速度突然施加到系统上,惯性将阻止加速度所产生的变化,从而惯性力的方向与所施加的加速度的方向相反。
–加速度可以通过定义部件或者矢量进行施加。
标准的地球重力可以作为一个载荷施加。
–其值为9.80665 m/s2 (在国际单位制中)–标准的地球重力载荷方向可以沿总体坐标轴的任何一个轴。
–由于“标准的地球重力”是一个加速度载荷,因此,如上所述,需要定义与其实际相反的方向得到重力的作用力。
3)旋转速度旋转速度是另一个可以实现的惯性载荷–整个模型围绕一根轴在给定的速度下旋转–可以通过定义一个矢量来实现,应用几何结构定义的轴以及定义的旋转速度–可以通过部件来定义,在总体坐标系下指定初始和其组成部分–由于模型绕着某根轴转动,因此要特别注意这个轴。
–缺省旋转速度需要输入每秒所转过的弧度值。
这个可以在路径“Tools > Control Panel >Miscellaneous > Angular V elocity” 里改变成每分钟旋转的弧度(RPM)来代替。
4)压力载荷:–压力只能施加在表面并且通常与表面的法向一致–正值代表进入表面(例如压缩);负值代表从表面出来(例如抽气等)–压力的单位为每个单位面积上力的大小5)力载荷:–力可以施加在结构的最外面,边缘或者表面。
最新Workbench-荷载、约束、接触定义(总结版)
Workbench荷载约束接触定义目录workbench荷载的含义 (1)Workbench约束的含义 (3)接触 (4)workbench荷载的含义1)方向载荷对大多数有方向的载荷和支撑,其方向多可以在任意坐标系中定义:–坐标系必须在加载前定义而且只有在直角坐标系下才能定义载荷和支撑的方向.–在Details view中, 改变“Define By”到“Components”. 然后从下拉菜单中选择合适的直角坐标系.–在所选坐标系中指定x, y, 和z分量–不是所有的载荷和支撑支持使用坐标系。
2)加速度(重力)–加速度以长度比上时间的平方为单位作用在整个模型上。
–用户通常对方向的符号感到迷惑。
假如加速度突然施加到系统上,惯性将阻止加速度所产生的变化,从而惯性力的方向与所施加的加速度的方向相反。
–加速度可以通过定义部件或者矢量进行施加。
标准的地球重力可以作为一个载荷施加。
–其值为9.80665 m/s2 (在国际单位制中)–标准的地球重力载荷方向可以沿总体坐标轴的任何一个轴。
–由于“标准的地球重力”是一个加速度载荷,因此,如上所述,需要定义与其实际相反的方向得到重力的作用力。
3)旋转速度旋转速度是另一个可以实现的惯性载荷–整个模型围绕一根轴在给定的速度下旋转–可以通过定义一个矢量来实现,应用几何结构定义的轴以及定义的旋转速度–可以通过部件来定义,在总体坐标系下指定初始和其组成部分–由于模型绕着某根轴转动,因此要特别注意这个轴。
–缺省旋转速度需要输入每秒所转过的弧度值。
这个可以在路径“Tools > ControlPanel >Miscellaneous > Angular Velocity” 里改变成每分钟旋转的弧度(RPM)来代替。
4)压力载荷:–压力只能施加在表面并且通常与表面的法向一致–正值代表进入表面(例如压缩);负值代表从表面出来(例如抽气等)–压力的单位为每个单位面积上力的大小5)力载荷:–力可以施加在结构的最外面,边缘或者表面。
最新Workbench-荷载、约束、接触定义(总结版)
Workbench荷载约束接触定义目录workbench荷载的含义 (1)Workbench约束的含义 (3)接触 (4)workbench荷载的含义1)方向载荷对大多数有方向的载荷和支撑,其方向多可以在任意坐标系中定义:–坐标系必须在加载前定义而且只有在直角坐标系下才能定义载荷和支撑的方向.–在Details view中, 改变“Define By”到“Components”. 然后从下拉菜单中选择合适的直角坐标系.–在所选坐标系中指定x, y, 和z分量–不是所有的载荷和支撑支持使用坐标系。
2)加速度(重力)–加速度以长度比上时间的平方为单位作用在整个模型上。
–用户通常对方向的符号感到迷惑。
假如加速度突然施加到系统上,惯性将阻止加速度所产生的变化,从而惯性力的方向与所施加的加速度的方向相反。
–加速度可以通过定义部件或者矢量进行施加。
标准的地球重力可以作为一个载荷施加。
–其值为9.80665 m/s2 (在国际单位制中)–标准的地球重力载荷方向可以沿总体坐标轴的任何一个轴。
–由于“标准的地球重力”是一个加速度载荷,因此,如上所述,需要定义与其实际相反的方向得到重力的作用力。
3)旋转速度旋转速度是另一个可以实现的惯性载荷–整个模型围绕一根轴在给定的速度下旋转–可以通过定义一个矢量来实现,应用几何结构定义的轴以及定义的旋转速度–可以通过部件来定义,在总体坐标系下指定初始和其组成部分–由于模型绕着某根轴转动,因此要特别注意这个轴。
–缺省旋转速度需要输入每秒所转过的弧度值。
这个可以在路径“Tools > ControlPanel >Miscellaneous > Angular Velocity” 里改变成每分钟旋转的弧度(RPM)来代替。
4)压力载荷:–压力只能施加在表面并且通常与表面的法向一致–正值代表进入表面(例如压缩);负值代表从表面出来(例如抽气等)–压力的单位为每个单位面积上力的大小5)力载荷:–力可以施加在结构的最外面,边缘或者表面。
Workbench-荷载、约束、接触定义(总结版)
Workbench荷载约束接触定义目录workbench荷载的含义 (1)Workbench约束的含义 (5)接触 (8)workbench荷载的含义1)方向载荷对大多数有方向的载荷和支撑,其方向多可以在任意坐标系中定义:–坐标系必须在加载前定义而且只有在直角坐标系下才能定义载荷和支撑的方向.–在Details view中, 改变“Define By”到“Components”. 然后从下拉菜单中选择合适的直角坐标系.–在所选坐标系中指定x, y, 和z分量–不是所有的载荷和支撑支持使用坐标系。
2)加速度(重力)–加速度以长度比上时间的平方为单位作用在整个模型上。
–用户通常对方向的符号感到迷惑。
假如加速度突然施加到系统上,惯性将阻止加速度所产生的变化,从而惯性力的方向与所施加的加速度的方向相反。
–加速度可以通过定义部件或者矢量进行施加。
标准的地球重力可以作为一个载荷施加。
–其值为9.80665 m/s2 (在国际单位制中)–标准的地球重力载荷方向可以沿总体坐标轴的任何一个轴。
–由于“标准的地球重力”是一个加速度载荷,因此,如上所述,需要定义与其实际相反的方向得到重力的作用力。
3)旋转速度旋转速度是另一个可以实现的惯性载荷–整个模型围绕一根轴在给定的速度下旋转–可以通过定义一个矢量来实现,应用几何结构定义的轴以及定义的旋转速度–可以通过部件来定义,在总体坐标系下指定初始和其组成部分–由于模型绕着某根轴转动,因此要特别注意这个轴。
–缺省旋转速度需要输入每秒所转过的弧度值。
这个可以在路径“Tools > Control Panel >Miscellaneous > AngularVelocity”里改变成每分钟旋转的弧度(RPM)来代替。
4)压力载荷:–压力只能施加在表面并且通常与表面的法向一致–正值代表进入表面(例如压缩);负值代表从表面出来(例如抽气等)–压力的单位为每个单位面积上力的大小5)力载荷:–力可以施加在结构的最外面,边缘或者表面。
Workbench
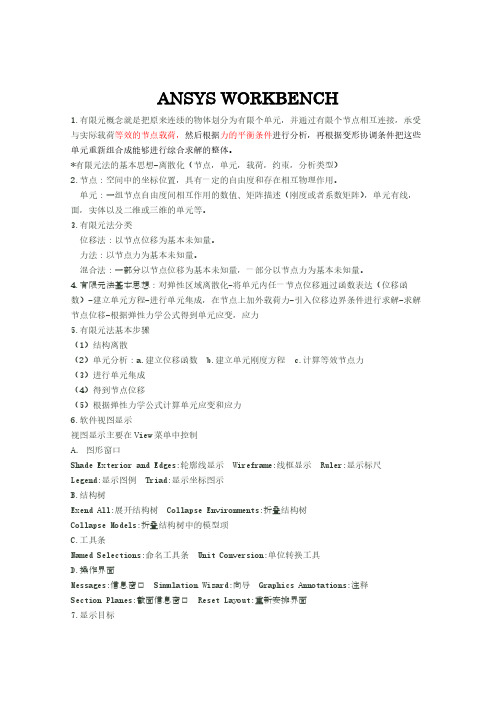
ANSYS WORKBENCH1.有限元概念就是把原来连续的物体划分为有限个单元,并通过有限个节点相互连接,承受与实际载荷等效的节点载荷,然后根据力的平衡条件进行分析,再根据变形协调条件把这些单元重新组合成能够进行综合求解的整体。
*有限元法的基本思想-离散化(节点,单元,载荷,约束,分析类型)2.节点:空间中的坐标位置,具有一定的自由度和存在相互物理作用。
单元:一组节点自由度间相互作用的数值、矩阵描述(刚度或者系数矩阵),单元有线,面,实体以及二维或三维的单元等。
3.有限元法分类位移法:以节点位移为基本未知量。
力法:以节点力为基本未知量。
混合法:一部分以节点位移为基本未知量,一部分以节点力为基本未知量。
4.有限元法基本思想:对弹性区域离散化-将单元内任一节点位移通过函数表达(位移函数)-建立单元方程-进行单元集成,在节点上加外载荷力-引入位移边界条件进行求解-求解节点位移-根据弹性力学公式得到单元应变,应力5.有限元法基本步骤(1)结构离散(2)单元分析:a.建立位移函数 b.建立单元刚度方程 c.计算等效节点力(3)进行单元集成(4)得到节点位移(5)根据弹性力学公式计算单元应变和应力6.软件视图显示视图显示主要在View菜单中控制A.图形窗口Shade Exterior and Edges:轮廓线显示 Wireframe:线框显示 Ruler:显示标尺Legend:显示图例 Triad:显示坐标图示B.结构树Exend All:展开结构树 Collapse Environments:折叠结构树Collapse Models:折叠结构树中的模型项C.工具条Named Selections:命名工具条 Unit Conversion:单位转换工具D.操作界面Messages:信息窗口 Simulation Wizard:向导 Graphics Annotations:注释Section Planes:截面信息窗口 Reset Layout:重新安排界面7.显示目标在图形窗口中单击鼠标右键,在弹出的选项里选择Go To Hidden Bodies In Tree,系统会自动在结构树Geometry项中弹出被隐藏的目标,以蓝色加亮方式显示,在结构树中选中该项,单击右键选Show Body显示。
Workbench荷载、约束、接触定义(总结版)

Workbench荷载约束接触定义目录workbe nch荷载的含义................................................................................错误!未定义书签。
Workbe nch约束的含义...............................................................................错误!未定义书签。
接触...........................................................................................................错误!未定义书签。
workbe nch荷载的含义1)方向载荷对大多数有方向的载荷和支撑,其方向多可以在任意坐标系中定义:–坐标系必须在加载前定义而且只有在直角坐标系下才能定义载荷和支撑的方向.–在Detai ls view中,改变“DefineBy”到“Compon ents”.然后从下拉菜单中选择合适的直角坐标系.–在所选坐标系中指定x, y, 和z分量–不是所有的载荷和支撑支持使用坐标系。
2)加速度(重力)–加速度以长度比上时间的平方为单位作用在整个模型上。
–用户通常对方向的符号感到迷惑。
假如加速度突然施加到系统上,惯性将阻止加速度所产生的变化,从而惯性力的方向与所施加的加速度的方向相反。
–加速度可以通过定义部件或者矢量进行施加。
标准的地球重力可以作为一个载荷施加。
–其值为9.80665m/s2 (在国际单位制中)–标准的地球重力载荷方向可以沿总体坐标轴的任何一个轴。
–由于“标准的地球重力”是一个加速度载荷,因此,如上所述,需要定义与其实际相反的方向得到重力的作用力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
w o r k b e n c h位移约束的
类型
The Standardization Office was revised on the afternoon of December 13, 2020
Ansys workbench约束的类型
(1)固定约束(Fixed support):
—在顶点,边缘或面上约束所有自由度;
—对于实体,限制X,Y和Z的平移:
—对于壳和梁,限制X,Y和Z的平移和转动。
(2)给定位移(Displacement):
—在顶点,边缘或面上给定已知的位移;
—允许在X,Y和Z方向给予强制位移;
—输入“0”代表此方向上即被约束;
—不设定某个方向的值则意味着实体在这个方向上自由运动。
用于在点,边或面上施加已知位移,该约束允许给出X,Y,Z方向上的平动位移(在自定义坐标系下),当为“0”时表示该方向是受限的,当空白时表达该方向自由。
(3)无摩擦约束(Frictionless Support):
—在面上施加法向约束:
—对于实体,这个约束可以用施加一个对称边界条件来实现,因为对称面等同于法向约束。
(4)圆柱面约束(Cylindrical Support);
—施加在圆柱表面;
—用户可以指定是轴向,径向或者切向约束;
—仅仅适用于小变形(线性)分析。
(5)弹性约束(Elastic Support):该约束允许在面,边界上模拟类似弹簧的行为,基础的刚度为使基础产生单位法向偏移所需要的压力。
(6)仅有压缩的约束(Compression only Support):该约束只能在正常压缩方向施加约束,它可以用来模拟圆柱面上受销钉,螺栓等的作用,求解时需要进行迭代。
(7)简单约束(Simple Supported):可以将其施加在梁或壳体的边缘或者顶点上,用来限制平移,但是允许旋转并且所有旋转都是自由的。
(8)转动约束(Fixed Rotation):可以将其施加在梁或壳体的边缘或者顶点上。
与简单约束相反,它用来约束旋转,但是不限制平移。
只能在line body/beam,wire body,shell这些单元中使用。