步进电机驱动模块L298N介绍
L298N中文资料

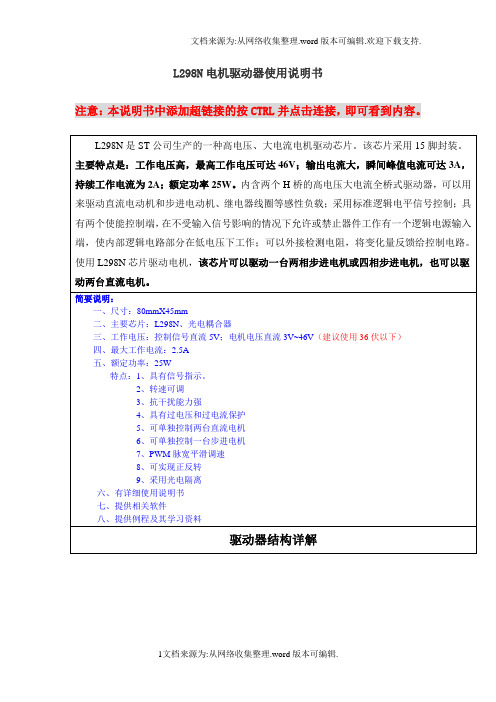
L298N中文资料步进电机驱动芯片L298中文资料双全桥步进电机专用驱动芯片( Dual Full-Bridge Driver )L298中文资料L298N 为SGS-THOMSON Microelectronics 所出产的双全桥步进电机专用驱动芯片( Dual Full-Bridge Driver ) ,内部包含4信道逻辑驱动电路,是一种二相和四相步进电机的专用驱动器,可同时驱动2个二相或1个四相步进电机,内含二个H-Bridge 的高电压、大电流双全桥式驱动器,接收标准TTL逻辑准位信号,可驱动46V、2A以下的步进电机,且可以直接透过电源来调节输出电压;此芯片可直接由单片机的IO端口来提供模拟时序信号,但在本驱动电路中用L297 来提供时序信号,节省了单片机IO 端口的使用。
L298N 之接脚如图9 所示,Pin1 和Pin15 可与电流侦测用电阻连接来控制负载的电路; OUTl、OUT2 和OUT3、OUT4 之间分别接2 个步进电机;input1~input4 输入控制电位来控制电机的正反转;Enable 则控制电机停转。
图9 L298引脚图图10 L298 内部逻辑图L298 ABSOLUTE MAXIMUM RATINGS 绝对最大额定值: Symbol符号Parameter 参数Value数值单位VSPower Supply 电源50VSSLogic Supply Voltage 电源电压7VVI,VenInput and Enable Voltage 输入电压和启用–0.3 to 7VIO峰值输出电流(每通道)非重复性(t= 100ms)3重复(80% on –20% off; ton = 10ms) 2.5直流运行2VsensSensing Voltage 感应电压–1 to 2.3VPtotTotal Power Dissipation (Tcase=75℃)总功率耗散(Tcase=75 ℃)25WTopJunction Operating Temperature 结工作温度–25 to 130℃Tstg,TjStorage and Junction Temperature 储存温度–40 to 150℃L298 PIN FUNCTIONS (refer to the block diagram) 引脚功能(请参阅框图):PowerSONameFunction 功能说明1;152;19Sense A; Sense B 引脚电流监测端,1、15和PowerSO的2、19用法一样,SEN1、SEN2分别为两个H桥的电流反馈脚,不用时可以直接接地2;34;5Out 1; Out 21Y1、1Y2输出端46VS功率电源电压,此引脚与地必须连接100nF电容器 5;77;9Input 1; Input 21A1、1A2输入端,TTL电平兼容6;118;14Enable A; Enable BTTL电平兼容输入 1EN、2EN使能端,低电平禁止输出 81,10,11,20GNDGND地912VSS逻辑电源电压。
L298N驱动模块使用说明

1.产品说明产品说明::本L298N 驱动模块,采用ST 公司原装全新的L298N 芯片,采用SMT 工艺稳定性高,采用高质量铝电解电容,使电路稳定工作。
可以直接驱动两路3-16V 直流电机,并提供了5V 输出接口(输入最低只要6V),可以给5V 单片机电路系统供电(低纹波系数),支持3.3V MCU ARM 控制,可以方便的控制直流电机速度和方向,也可以控制2相步进电机,5线4相步进电机。
是智能小车必备利器。
:产品参数:.产品参数1.驱动芯片:L298N双H桥直流电机驱动芯片2.驱动部分端子供电范围Vs:+5V~+16V ; 如需要板内取电,则供电范围Vs:+6V~+16V3.驱动部分峰值电流Io:2A4.逻辑部分端子供电范围Vss:+5V~+7V(可板内取电+5V)5.逻辑部分工作电流范围:0~36mA6.控制信号输入电压范围(IN1 IN2 IN3 IN4):低电平:-0.3V≤Vin≤1.5V高电平:2.3V≤Vin≤Vss7.使能信号输入电压范围(ENA ENB):低电平:-0.3≤Vin≤1.5V(控制信号无效)高电平:2.3V≤Vin≤Vss(控制信号有效)8.最大功耗:20W(温度T=75℃时)9.存储温度:-25℃~+130℃10.驱动板尺寸:55mm*45mm*33mm(带固定铜柱和散热片高度)12.其他扩展:控制方向指示灯、逻辑部分板内取电接口。
3.接口说明接口说明::图中蓝色端子为电机驱动输出端与驱动电源输入端,排针处为电机控制逻辑输入端与5V 电源输出端OUT4 OUT3 OUT2 OUT1 控制电机输出端 VDD GND 为驱动电源输入端输入电压+6-16V。
L298N电机驱动器使用说明

实例一:步进电机的控制实例
步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一 个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。 步进电机可分为反应式步进电机(简称 VR)、永磁式步进电机(简 称 PM)和混合式步进电机(简称 HB)。 一、步进电机最大特点是: 1、它是通过输入脉冲信号来进行控制的。 2、电机的总转动角度由输入脉冲数决定。 3、电机的转速由脉冲信号频率决定。 二、步进电机的驱动电路 根据控制信号工作,控制信号由单片机产生。(或者其他信号源) 三、控制步进电机的速度 如果给步进电机发一个控制脉冲,它就转一步,再发一个脉冲,它会 再转一步。两个脉冲的间隔越短,步进电机就转得越快。调整单片机 发出的脉冲频率,就可以对步进电机进行调速。(注意:如果脉冲频 率的速度大于了电机的反应速度,那么步进电机将会出现失步现象)。
式
IN1
IN2
IN3
IN4 调速端 调速端
A
B
正转
高
低
/
/
高
/
M1
反转
低
高
/
/
高
/
停止
低
低
/
/
高
/
正转
/
/
高
低
/
高
M2
反转
/
/
低
高
/
高
停止
低
低
/
/
/
高
实例二:直流电机的控制实例
使用直流/步进两用驱动器可以驱动两台直流电机。分别为 M1
和 M2。引脚 A,B 可用于输入 PWM 脉宽调制信号对电机进行调速控 制。(如果无须调速可将两引脚接 5V,使电机工作在最高速状态,既
L298N大功率电机驱动模块使用手册

void main(void)
{
DelayMs(100);
while(1)
{
motor_ffw_setp(50); //电机正转 50 步
DelayMs(300);
//换向延时
motor_ffw_setp(50); //电机正转 50 步
DelayMs(300);
//换向延时
motor_ffw_setp(50); //电机正转 50 步
uchar MOTO_SETP_TIME = 2;//步进电机每走一步要用的时间(单位毫秒)
/*=========================================================================
主程序
=========================================================================*/
sbit PWM2_OUT = P3^5; //M2:PWM 的输出脚
sbit BEEP
sbit MOTOR1_DR1 = P3^0; //M1:电机转向控制 1
sbit MOTOR1_DR2 = P3^1; //M1:电机转向控制 2
L298N电机驱动模块详解
L298N电机驱动器使用说明书注意:本说明书中添加超链接的按CTRL并点击连接,即可看到内容。
1.信号电源引入端2.控制信号输入端3.直流电机调速PWM脉宽信号输入端。
(控制步进电机或者控制直流电机无需调速时,保持此状态)4.控制信号指示灯5.光电隔离(抗干扰) 6.核心芯片(L298N)7.二极管桥式续流保护8.电源滤波9.端子接线实例一:步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
一、步进电机最大特点是:1、它是通过输入脉冲信号来进行控制的。
2、电机的总转动角度由输入脉冲数决定。
3、电机的转速由脉冲信号频率决定。
二、步进电机的驱动电路根据控制信号工作,控制信号由单片机产生。
(或者其他信号源)三、基本原理作用如下:两相四拍工作模式时序图:(1)控制换相顺序1、通电换相这一过程称为脉冲分配。
例如:1、两相四线步进电机的四拍工作方式,其各相通电顺序为(A-B-A’-B’)通电控制脉冲必须严格按照这一顺序分别控制A,B相的通断。
)2、两相四线步进电机的四拍工作方式,其各相通电顺序为:(A-AB-B-BA’-A’-A’B’-B’-B’依次循环。
(出于对力矩、平稳、噪音及减少角度等方面考虑。
往往采用八拍工作方式)(2)控制步进电机的转向如果给定工作方式正序换相通电,步进电机正转,如果按反序通电换相,则电机就反转。
如:正转通电顺序是:(A-B-A’-B’依次循环。
)则反转的通电顺序是:(B‘-A’-B-A依次循环。
)参考下例:(3)控制步进电机的速度如果给步进电机发一个控制脉冲,它就转一步,再发一个脉冲,它会再转一步。
两个脉冲的间隔越短,步进电机就转得越快。
调整单片机发出的脉冲频率,就可以对步进电机进行调速。
(注意:如果脉冲频率的速度大于了电机的反应速度,那么步进电机将会出现失步现象)。
L298N驱动模块详细资料
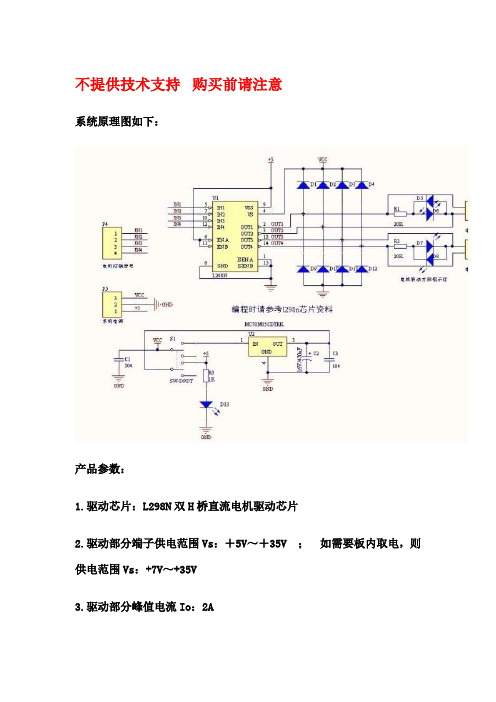
不提供技术支持购买前请注意
系统原理图如下:
产品参数:
1.驱动芯片:L298N双H桥直流电机驱动芯片
2.驱动部分端子供电范围Vs:+5V~+35V ;如需要板内取电,则供电范围Vs:+7V~+35V
3.驱动部分峰值电流Io:2A
4.逻辑部分端子供电范围Vss:+5V~+7V(可板内取电+5V)
5.逻辑部分工作电流范围:0~36mA
6.控制信号输入电压范围:
低电平:-0.3V≤Vin≤1.5V
高电平:2.3V≤Vin≤Vss
7.使能信号输入电压范围:
低电平:-0.3≤Vin≤1.5V(控制信号无效)
高电平:2.3V≤Vin≤Vss(控制信号有效)
8.最大功耗:20W(温度T=75℃时)
9.存储温度:-25℃~+130℃
10.驱动板尺寸:55mm*49mm*33mm(带固定铜柱和散热片高度)
11.驱动板重量:33g
12.其他扩展:控制方向指示灯、逻辑部分板内取电接口。
使用说明:
步进电机的驱动:板上的ENA与ENB为高电平时有效,这里的电平指的是TTL电平。
ENA为A1和A2的使能端,ENB为B1和IB2的使能端。
BJ接步进电机公共端。
步进电机控制逻辑如下所示,其中A、B、C、D为步进电机的四个线圈,为1表示有电流通过,为0表示没有电流流过。
线圈连线图如下图所示(以四相步进电机为例)。
步进电机驱动模块L298N介绍
步进电机驱动模块L298N介绍————————————————————————————————作者:————————————————————————————————日期:不进电机驱动L298N均采用ST原装芯片,性能非常稳定!一、特点L298N是ST公司生产的一款电机驱动芯片,L298N芯片内含两个全桥式驱动器,可以同时驱动两个直流电机或者一个两相四线步进电机。
逻辑输入部分加入光电隔离模块,从而更好的保护控制器;模块最大输入电压为40V,单路峰值电流为3A,持续2A,最大功率不得超过25W;逻辑端输入端采用标准TTL电平控制,并设有两个使能端ENA\ENB,用来允许、禁止器件工作,默认接到VCC。
IN1-IN4:逻辑输入端,其中IN1、IN2控制电机M1;IN3、IN4控制电机M2。
例如IN1输入高电平1,IN2输入低电平0,对应电机M1正转;IN1输入低电平0,IN2输入高电平1,对应电机M1反转,调速就是改变高电平的占空比。
ENA、ENB:L298N使能端(高电平有效,默认用短接到VCC),可通过这两个端口实现PWM 调速(使用PWM调速时取下跳线帽),具体参考L298N芯片手册。
VCC/GND:逻辑控制部分供电,可以用控制器的5V/3.3V来供电。
VIN/GND:电机供电电源接口,VIN、GND分别接电源正、负极M1、M2:电机接口,没有正负之分,如果发现电机转向不对将电机两线调换即可例子四、电机控制:例如逻辑输入部分接单片机P0口的P0.0-P0.3,那么想让电机正转只要给1010,反转给0101即可:Void main(){While(1){P0=0xaa;//IN1-4输入1010,电机正转Delay(1000);//延时1秒P0=0x55;//IN1-4输入0101,电机反转Delay(1000);//延时1秒}}。
L298N中文资料
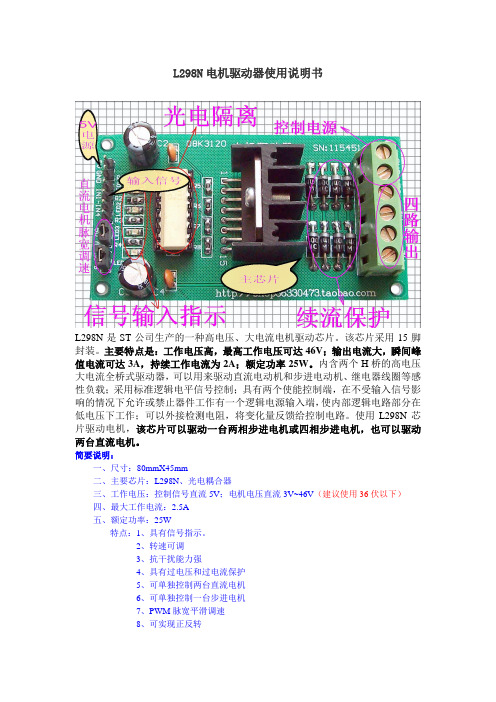
L298N电机驱动器使用说明书L298N是ST公司生产的一种高电压、大电流电机驱动芯片。
该芯片采用15脚封装。
主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率25W。
内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使内部逻辑电路部分在低电压下工作;可以外接检测电阻,将变化量反馈给控制电路。
使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。
简要说明:一、尺寸:80mmX45mm二、主要芯片:L298N、光电耦合器三、工作电压:控制信号直流5V;电机电压直流3V~46V(建议使用36伏以下)四、最大工作电流:2.5A五、额定功率:25W特点:1、具有信号指示。
2、转速可调3、抗干扰能力强4、具有过电压和过电流保护5、可单独控制两台直流电机6、可单独控制一台步进电机7、PWM脉宽平滑调速8、可实现正反转9、采用光电隔离六、有详细使用说明书七、提供相关软件八、提供例程及其学习资料实例一:步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
一、步进电机最大特点是:1、它是通过输入脉冲信号来进行控制的。
2、电机的总转动角度由输入脉冲数决定。
3、电机的转速由脉冲信号频率决定。
二、步进电机的驱动电路根据控制信号工作,控制信号由单片机产生。
(或者其他信号源)三、基本原理作用如下:两相四拍工作模式时序图:(1)控制换相顺序1、通电换相这一过程称为脉冲分配。
例如:1、两相四线步进电机的四拍工作方式,其各相通电顺序为(A-B-A ’-B ’)通电控制脉冲必须严格按照这一顺序分别控制A,B 相的通断。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
不进电机驱动L298N均采用ST原装芯片,性能非常稳定!
一、特点
L298N是ST公司生产的一款电机驱动芯片,L298N芯片内含两个全桥式驱动器,可以同时驱动两个直流电机或者一个两相四线步进电机。
逻辑输入部分加入光电隔离模块,从而更好的保护控制器;模块最大输入电压为40V,单路峰值电流为3A,持续2A,最大功率不得超过25W;逻辑端输入端采用标准TTL电平控制,并设有两个使能端ENA\ENB,用来允许、禁止器件工作,默认接到VCC。
IN1-IN4:逻辑输入端,其中IN1、IN2控制电机M1;IN3、IN4控制电机M2。
例如IN1输入高电平1,IN2输入低电平0,对应电机M1正转;IN1输入低电平0,IN2输入高电平1,对应电机M1反转,调速就是改变高电平的占空比。
ENA、ENB:L298N使能端(高电平有效,默认用短接到VCC),可通过这两个端口实现PWM 调速(使用PWM调速时取下跳线帽),具体参考L298N芯片手册。
VCC/GND:逻辑控制部分供电,可以用控制器的5V/3.3V来供电。
VIN/GND:电机供电电源接口,VIN、GND分别接电源正、负极
M1、M2:电机接口,没有正负之分,如果发现电机转向不对将电机两线调换即可
例子
四、电机控制:
例如逻辑输入部分接单片机P0口的P0.0-P0.3,那么想让电机正转只要给1010,反转给0101即可:
Void main()
{
While(1)
{
P0=0xaa;//IN1-4输入1010,电机正转
Delay(1000);//延时1秒
P0=0x55;//IN1-4输入0101,电机反转
Delay(1000);//延时1秒
}
}。