外文翻译--轮式移动机器人的导航与控制
机械外文翻译外文文献英文文献机械臂动力学与控制的研究

外文出处:Ellekilde, L. -., & Christensen, H. I. (2009). Control of mobile manipulator using the dynamical systems approach. Robotics and Automation, Icra 09, IEEE International Conference on (pp.1370 - 1376). IEEE.机械臂动力学与控制的研究拉斯彼得Ellekilde摘要操作器和移动平台的组合提供了一种可用于广泛应用程序高效灵活的操作系统,特别是在服务性机器人领域。
在机械臂众多挑战中其中之一是确保机器人在潜在的动态环境中安全工作控制系统的设计。
在本文中,我们将介绍移动机械臂用动力学系统方法被控制的使用方法。
该方法是一种二级方法, 是使用竞争动力学对于统筹协调优化移动平台以及较低层次的融合避障和目标捕获行为的方法。
I介绍在过去的几十年里大多数机器人的研究主要关注在移动平台或操作系统,并且在这两个领域取得了许多可喜的成绩。
今天的新挑战之一是将这两个领域组合在一起形成具有高效移动和有能力操作环境的系统。
特别是服务性机器人将会在这一方面系统需求的增加。
大多数西方国家的人口统计数量显示需要照顾的老人在不断增加,尽管将有很少的工作实际的支持他们。
这就需要增强服务业的自动化程度,因此机器人能够在室内动态环境中安全的工作是最基本的。
图、1 一台由赛格威RMP200和轻重量型库卡机器人组成的平台这项工作平台用于如图1所示,是由一个Segway与一家机器人制造商制造的RMP200轻机器人。
其有一个相对较小的轨迹和高机动性能的平台使它适应在室内环境移动。
库卡工业机器人具有较长的长臂和高有效载荷比自身的重量,从而使其适合移动操作。
当控制移动机械臂系统时,有一个选择是是否考虑一个或两个系统的实体。
在参考文献[1]和[2]中是根据雅可比理论将机械手末端和移动平台结合在一起形成一个单一的控制系统。
模糊控制的移动机器人的外文翻译.doc
1998年的IEEE国际会议上机器人及自动化Leuven ,比利时1998年5月一种实用的办法--带拖车移动机器人的反馈控制F. Lamiraux and J.P. Laumond拉斯,法国国家科学研究中心法国图卢兹{florent ,jpl}@laas.fr摘要本文提出了一种有效的方法来控制带拖车移动机器人。
轨迹跟踪和路径跟踪这两个问题已经得到解决。
接下来的问题是解决迭代轨迹跟踪。
并且把扰动考虑到路径跟踪内。
移动机器人Hilare的实验结果说明了我们方法的有效性。
1引言过去的8年,人们对非完整系统的运动控制做了大量的工作。
布洛基[2]提出了关于这种系统的一项具有挑战性的任务,配置的稳定性,证明它不能由一个简单的连续状态反馈。
作为替代办法随时间变化的反馈[10,4,11,13,14,15,18]或间断反馈[3]也随之被提出。
从[5] 移动机器人的运动控制的一项调查可以看到。
另一方面,非完整系统的轨迹跟踪不符合布洛基的条件,从而使其这一个任务更为轻松。
许多著作也已经给出了移动机器人的特殊情况的这一问题[6,7,8,12,16]。
所有这些控制律都是工作在相同的假设下:系统的演变是完全已知和没有扰动使得系统偏离其轨迹。
很少有文章在处理移动机器人的控制时考虑到扰动的运动学方程。
但是[1]提出了一种有关稳定汽车的配置,有效的矢量控制扰动领域,并且建立在迭代轨迹跟踪的基础上。
存在的障碍使得达到规定路径的任务变得更加困难,因此在执行任务的任何动作之前都需要有一个路径规划。
在本文中,我们在迭代轨迹跟踪的基础上提出了一个健全的方案,使得带拖车的机器人按照规定路径行走。
该轨迹计算由规划的议案所描述[17] ,从而避免已经提交了输入的障碍物。
在下面,我们将不会给出任何有关规划的发展,我们提及这个参考的细节。
而且,我们认为,在某一特定轨迹的执行屈服于扰动。
我们选择的这些扰动模型是非常简单,非常一般。
它存在一些共同点[1]。
翻译-全向轮移动机器人的设计和控制

全向轮移动机器人的设计和控制050308225 Alex.Wang摘要这篇论文介绍一个全向移动机器人作为教育学习。
由于它的全向轮设计,这种机器人拥有有各个方向移动的能力。
这篇论文主要提供了一些关于常用的和特殊的车轮设计,以及全向轮机械设计方面和电子控制方法:远程控制、自动导航寻迹和自动控制的方法。
1、引言移动机器人在工业和技术方面应用的重要性正在日益的增加,在无人监控值守、检查作业、运输运送领域已经得到了广泛的应用。
一个更加紧俏的市场是移动娱乐机器人的开发。
作为一个全自动的移动机器人,其中一个主要的应用需求是它的空间移动能力,同时能够避免障碍物并且发现去下一站的路径。
为了能实现这种任务,能够引导机器人移动的功能如定位、导航必须为机器人提供他当前位置信息,这就意味着,它要借助于多个传感器,外部的状态参考和算法。
为实现移动机器人能够在狭窄的区域移动并且避开障碍物,必须具备良好的移动性能并得到正确而巧妙的引导,这些能力主要取决于车轮的设计。
关于这方面的研究正在持续不断的进行,以改善移动机器人系统的自动导航能力。
本篇论文介绍一种全方向的移动机器人作为教育之用。
采用特殊的Mecanum轮设计,使这种机器人拥有全部方向的移动能力。
论文目前提供一些关于传统的和特殊的车轮设计、机械结构设计以及电路和控制方法、远程遥控、线性跟踪(LINE FOLLOW)、自动控制方面的信息。
由于这种机器人的移动能力和它各种控制方法的多样选择性,本章中讨论的机器人可以作为一个非常有趣的教育性平台。
这篇论文是一项在Robotics Laboratory of the Mechanical Engineering Faculty, ”Gh. Asachi” Iasi理工大学研究成果的总结报告。
2、全方向移动能力“全方向”这个术语是用来描述一个系统在任意的环境结构中立刻向某一方向移动的能力。
机器人型运动装置通常是为在平坦的平面上移动而设计的,运行在仓库地面、路面、LAKE、桌面等。
移动机器人的导航与运动控制算法研究
移动机器人的导航与运动控制算法研究随着科技的快速发展,移动机器人已经成为现实生活中的一部分。
移动机器人的导航与运动控制算法的研究,对于实现机器人智能化、自主化以及高效性具有重要意义。
本文将对移动机器人导航与运动控制算法的研究进行探讨,并介绍目前主流的几种算法。
移动机器人的导航算法主要包括路径规划、环境感知和定位。
路径规划是机器人从当前位置到目标位置的路径选择,环境感知则是机器人通过传感器获取周围环境信息,以便更好地进行路径规划和避障,而定位则是机器人获取自身位置信息的过程。
在路径规划方面,A*算法是一种常用的搜索算法,它通过建立搜索树来找到最短路径。
A*算法的核心思想是同时考虑启发式函数和实际代价函数,以选择最佳路径。
此外,Dijkstra算法和D*算法也常用于路径规划。
Dijkstra算法通过计算节点之间的最短距离来确定路径,而D*算法则是在遇到环境变化时,可以通过增量式的方式进行路径更新。
在环境感知方面,移动机器人通常会配备各种传感器,如摄像头、激光雷达和超声波传感器等。
这些传感器可以帮助机器人感知周围的障碍物、地图等环境信息。
通过对环境信息的获取和处理,机器人可以根据目标位置和现实环境进行综合考虑,以便找到最佳路径。
定位是移动机器人导航算法的重要一环。
目前常用的定位方法包括惯性导航系统(INS)、全局定位系统(GPS)和视觉定位等。
INS通过测量机器人的线性加速度和角速度来估计其位置和姿态,而GPS则是通过接收卫星信号来获取机器人的经纬度信息。
视觉定位则是利用摄像头获取环境图像,通过图像处理和特征匹配来确定机器人的位置。
在运动控制方面,控制算法的设计主要涉及机器人的轨迹跟踪和姿态控制。
轨迹跟踪是指机器人按照指定的路径进行运动,并通过不断调整控制参数,使机器人能够更好地跟踪预定轨迹。
姿态控制则是指机器人根据期望姿态和当前实际姿态之间的差距,通过控制器进行调整,以使机器人能够保持稳定。
常见的轨迹跟踪算法包括PID控制、模糊控制和神经网络控制等。
轮式机器人的路径规划与控制技术研究

轮式机器人的路径规划与控制技术研究随着科技的不断进步,轮式机器人已经成为了人工智能领域中的重要组成部分。
轮式机器人可广泛应用于各种环境下,包括室内、室外、平地、山地、水下等多种环境,使其具有广泛的应用前景。
但是,要让轮式机器人能够在复杂的环境下进行准确的路径规划并执行动作,需要借助于强大的技术支持。
本文将主要介绍轮式机器人的路径规划与控制技术研究。
一、路径规划技术路径规划是一项基本但十分关键的技术,它需要根据机器人所处的环境及任务需求,选择适当的路径来实现任务。
对于轮式机器人,我们通常采用三种不同的技术来完成路径规划:传统的基于轨迹的技术、图形化的技术以及基于学习的强化学习技术。
1. 基于轨迹的路径规划基于轨迹的路径规划是一种较为传统且较为简单的路径规划方式,适用于较为简单的环境。
该方法通过计算机模拟机器人的运动轨迹,进而进行路径规划。
这种方法的优点是计算速度较快,适用于较为简单的机器人应用场合。
但是该方法在复杂环境下的精度会受到很大的影响。
2. 图形化的路径规划图形化的路径规划方法是一种基于图形化交互的路径规划技术。
这种方法主要利用计算机程序来模拟出机器人及其周围的环境,通过交互式屏幕及热键的控制来对机器人进行路径规划。
相对于传统的基于轨迹的路径规划方法,该方法克服了精度不够高的问题,具有更好的精度和适用性。
但是该方法需要进行大量的手动操作,并且需要较高的人机交互能力。
3. 基于学习的强化学习技术基于学习的强化学习技术是一种先进而全新的路径规划技术,该技术运用了神经网络的方法,对机器人进行实时学习,使其能够适应更加复杂的环境,并识别出各种条件下的最佳路径。
该方法不仅可以减少规划过程的工作量,而且还能够自动对机器人进行学习和优化,大大提高了机器人的工作效率和速度。
但是由于该方法需要高度的计算能力和运算时间,所以目前还不引导广泛使用。
二、控制技术控制技术是机器人完成任务的基本技术之一,对于轮式机器人这样的移动式机器人,准确的控制其运动轨迹是十分重要的。
机器人外文翻译(文献翻译-中英文翻译)

外文翻译外文资料:RobotsFirst, I explain the background robots, robot technology development. It should be said it is a common scientific and technological development of a comprehensive results, for the socio-economic development of a significant impact on a science and technology. It attributed the development of all countries in the Second World War to strengthen the economic input on strengthening the country's economic development. But they also demand the development of the productive forces the inevitable result of human development itself is the inevitable result then with the development of humanity, people constantly discuss the natural process, in understanding and reconstructing the natural process, people need to be able to liberate a slave. So this is the slave people to be able to replace the complex and engaged in heavy manual labor, People do not realize right up to the world's understanding and transformation of this technology as well as people in the development process of an objective need. Robots are three stages of development, in other words, we are accustomed to regarding robots are divided into three categories. is a first-generation robots, also known as teach-type robot, it is through a computer, to control over one of a mechanical degrees of freedom Through teaching and information stored procedures, working hours to read out information, and then issued a directive so the robot can repeat according to the people at that time said the results show this kind of movement again, For example, the car spot welding robots, only to put this spot welding process, after teaching, and it is always a repeat of a work It has the external environment is no perception that the force manipulation of the size of the work piece there does not exist, welding 0S It does not know, then this fact from the first generation robot, it will exist this shortcoming, it in the 20th century, the late 1970s, people started to study the second-generation robot, called Robot with the feeling that This feeling with the robot is similar in function of a certain feeling, forinstance, force and touch, slipping, visual, hearing and who is analogous to that with all kinds of feelings, say in a robot grasping objects, In fact, it can be the size of feeling out, it can through visual, to be able to feel and identify its shape, size, color Grasping an egg, it adopted a acumen, aware of its power and the size of the slide. Third-generation robots, we were a robotics ideal pursued by the most advanced stage, called intelligent robots, So long as tell it what to do, not how to tell it to do, it will be able to complete the campaign, thinking and perception of this man-machine communication function and function Well, this current development or relative is in a smart part of the concept and meaning But the real significance of the integrity of this intelligent robot did not actually exist, but as we continued the development of science and technology, the concept of intelligent increasingly rich, it grows ever wider connotations.Now, I would like to briefly outline some of the industrial robot situation. So far, the industrial robot is the most mature and widely used category of a robot, now the world's total sales of 1.1 million Taiwan, which is the 1999 statistics, however, 1.1 million in Taiwan have been using the equipment is 75 million, this volume is not small. Overall, the Japanese industrial robots in this one, is the first of the robots to become the Kingdom, the United States have developed rapidly. Newly installed in several areas of Taiwan, which already exceeds Japan, China has only just begun to enter the stage of industrialization, has developed a variety of industrial robot prototype and small batch has been used in production.Spot welding robot is the auto production line, improve production efficiency and raise the quality of welding car, reduce the labor intensity of a robot. It is characterized by two pairs of robots for spot welding of steel plate, bearing a great need for the welding tongs, general in dozens of kilograms or more, then its speed in meters per second a 5-2 meter of such high-speed movement. So it is generally five to six degrees of freedom, load 30 to 120 kilograms, the great space, probably expected that the work of a spherical space, a high velocity, the concept of freedom, that is to say, Movement is relatively independent of the number of components, the equivalent of our body, waist is a rotary degree of freedom We have to be able to hold his arm, Arm can be bent, then this three degrees of freedom, Meanwhile there is a wristposture adjustment to the use of the three autonomy, the general robot has six degrees of freedom. We will be able to space the three locations, three postures, the robot fully achieved, and of course we have less than six degrees of freedom. Have more than six degrees of freedom robot, in different occasions the need to configure.The second category of service robots, with the development of industrialization, especially in the past decade, Robot development in the areas of application are continuously expanding, and now a very important characteristic, as we all know, Robot has gradually shifted from manufacturing to non-manufacturing and service industries, we are talking about the car manufacturer belonging to the manufacturing industry, However, the services sector including cleaning, refueling, rescue, rescue, relief, etc. These belong to the non-manufacturing industries and service industries, so here is compared with the industrial robot, it is a very important difference. It is primarily a mobile platform, it can move to sports, there are some arms operate, also installed some as a force sensor and visual sensors, ultrasonic ranging sensors, etc. It’s surrounding environment for the conduct of identification, to determine its campaign to complete some work, this is service robot’s one of the basic characteristics.For example, domestic robot is mainly embodied in the example of some of the carpets and flooring it to the regular cleaning and vacuuming. The robot it is very meaningful, it has sensors, it can furniture and people can identify, It automatically according to a law put to the ground under the road all cleaned up. This is also the home of some robot performance.The medical robots, nearly five years of relatively rapid development of new application areas. If people in the course of an operation, doctors surgery, is a fatigue, and the other manually operated accuracy is limited. Some universities in Germany, which, facing the spine, lumbar disc disease, the identification, can automatically use the robot-aided positioning, operation and surgery Like the United States have been more than 1,000 cases of human eyeball robot surgery, the robot, also including remote-controlled approach, the right of such gastrointestinal surgery, we see on the television inside. a manipulator, about the thickness fingers such a manipulator, inserted through the abdominal viscera, people on the screen operating the machines hand, it also used the method of laser lesion laser treatment, this is the case, peoplewould not have a very big damage to the human body.In reality, this right as a human liberation is a very good robots, medical robots it is very complex, while it is fully automated to complete all the work, there are difficulties, and generally are people to participate. This is America, the development of such a surgery Lin Bai an example, through the screen, through a remote control operator to control another manipulator, through the realization of the right abdominal surgery A few years ago our country the exhibition, the United States has been successful in achieving the right to the heart valve surgery and bypass surgery. This robot has in the area, caused a great sensation, but also, AESOP's surgical robot, In fact, it through some equipment to some of the lesions inspections, through a manipulator can be achieved on some parts of the operation Also including remotely operated manipulator, and many doctors are able to participate in the robot under surgery Robot doctor to include doctors with pliers, tweezers or a knife to replace the nurses, while lighting automatically to the doctor's movements linked, the doctor hands off, lighting went off, This is very good, a doctor's assistant.Robot is mankind's right-hand man; friendly coexistence can be a reliable friend. In future, we will see and there will be a robot space inside, as a mutual aide and friend. Robots will create the jobs issue. We believe that there would not be a "robot appointment of workers being laid off" situation, because people with the development of society, In fact the people from the heavy physical and dangerous environment liberated, so that people have a better position to work, to create a better spiritual wealth and cultural wealth.译文资料:机器人首先我介绍一下机器人产生的背景,机器人技术的发展,它应该说是一个科学技术发展共同的一个综合性的结果,同时,为社会经济发展产生了一个重大影响的一门科学技术,它的发展归功于在第二次世界大战中各国加强了经济的投入,就加强了本国的经济的发展。
基于ROS的轮式机器人定位与导航方法研究
基于ROS的轮式机器人定位与导航方法研究摘要:本文介绍了ROS轮式机器人系统在未知环境下的自主移动所依赖的传感器。
对可视化地图、栅格地图、拓扑地图、特征地图的特性进行了分析,选择了构建简单便于及时更新的栅格地图模型。
通过对导航所需要的5个步骤实现了轮式机器人在仿真环境下定位与导航的功能。
关键词:ROS;轮式机器人;定位;导航Robot Operating System简称ROS,是一种依赖于Linux内核的开源元操作系统。
ROS含有丰富的组件化工具包以及大量的工具、协议,来简化我们对机器人的控制,从而大大的提高了研发效率。
本文基于ROS研究轮式机器人的定位与导航方法。
首先,进行传感器选型和地图选择,配置机器人运行环境。
然后,通过SLAM建图拼接形成完整的地图环境。
最后,通过控制机器人的移动速度和方向实现轮式机器人的定位与导航功能。
1 传感器选型轮式机器人系统中实现自主移动,必须要考虑未知的环境特征。
在设计机器人系统时,能够提取环境信息的传感器必不可少。
这里对能够实现导航与定位目标的常用传感器进行描述[1]。
激光雷达:根据发射维数的不同来实现对不同待测目标的距离测量。
如一维激光雷达用于测量单向距离,三维激光雷达用于测量空间上物体距离。
线束数量的多少也作为激光雷达被选用时的参考依据,普通机器人通常使用线束较少的雷达。
激光雷达的优点在于其响应快、数据量小,缺点是成本较高。
里程计:常见的是编码器,用来控制机器人所处的位置或被电机所驱动的关节。
机器人移动时,车轮的旋转会触发编码器测量轮毂转数。
当测出车轮半径时,就可以计算出机器人某段时间内的移动距离和瞬时速度。
相机:在机器人SLAM技术中用到的相机根据摄像头个数有单目相机、双目相机之分;普通单目相机无法完成静态下测量距离的目标,双目相机虽然弥补了这一缺点,但是双目相机进行自身标定时颇为复杂,数据处理也比较困难。
而深度相机不仅可以提供彩色图像,还能获取单一像素的深度信息,目前室内机器人主要采用深度相机方案进行信息获取。
移动机器人路径规划和导航(英文)
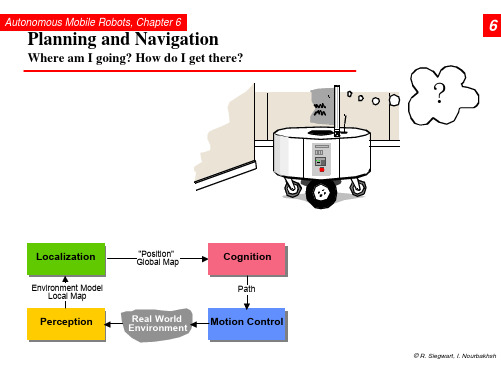
Autonomous Mobile Robots, Chapter 6
6.2.1
Road-Map Path Planning: Voronoi Diagram
• Easy executable: Maximize the sensor readings • Works also for map-building: Move on the Voronoi edges
© R. Siegwart, I. Nourbakhsh
Autonomous Mobile Robots, Chapter 6
6.2.1
Road-Map Path Planning: Adaptive Cell Decomposition
© R. Siegwart, I. Nourbakhsh
Autonomous Mobile Robots, Chapter 6
© R. Siegwart, I. Nourbakhsh
Autonomous Mobile Robots, Chapter 6
6.2.1
Road-Map Path Planning: Voronoi, Sysquake Demo
© R. Siegwart, I. Nourbakhsh
Autonomous Mobile Robots, Chapter 6
Ø Topological or metric or a mixture between both.
• First step:
Ø Representation of the environment by a road-map (graph), cells or a potential field. The resulting discrete locations or cells allow then to use standard planning algorithms.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毕业设计(论文)外文资料翻译系部:机械工程专业:机械工程及自动化姓名:学号:外文出处:Control and(用外文写)Robotics(CRB) Technical Report 附件:1.外文资料翻译译文;2.外文原文。
附件1:外文资料翻译译文轮式移动机器人的导航与控制摘要:本文研究了把几种具有导航功能的方法运用于不同的控制器开发,以实现在一个已知障碍物前面控制一个开环系统(例如:轮式移动机器人)执行任务。
第一种方法是基于三维坐标路径规划的控制方法。
具有导航功能的控制器在自由配置的空间中生成一条从初始位置到目标位置的路径。
位移控制器控制移动机器人沿设置的路径运动并停止在目标位置。
第二种方法是基于二维坐标路径规划的控制方法。
在二维平面坐标系中建立导航函数,基于这种导航函数设计的微控制器是渐进收敛控制系统。
仿真结果被用来说明第二种控制方法的性能。
1介绍很多研究者已经提出不同算法以解决在障碍物杂乱的环境下机器人的运动控制问题。
对与建立无碰撞路径和传统的路径规划算法,参考文献[19]的第一章第九部分中提供了的全面总结。
从Khatib在参考文献[13]的开创性工作以来,很显然控制机器人在已知障碍物下执行任务的主流方法之一依然是构建和应用位函数。
总之,位函数能够提供机器人工作空间、障碍位置和目标的位场。
在参考文献[19]中提供对于位函数的全面研究。
应用位函数的一个问题是局部极小化的情况可能发生以至于机器人无法到达目标位置。
不少研究人士提出了解决局部极小化错误的方法(例如参考文献[2], [3],[5], [14], [25])。
其中Koditschek在参考文献[16]中提供了一种解决局部极小化错误的方法,那是通过基于一种特殊的位函数的完整系统构建导航函数,此函数有精确的数学结构,它能够保证存在唯一最小值。
在针对标准的 (完整的)系统的先前的结果的影响下, 面对更多的具有挑战性的非完整系统,越来越多的研究集中于位函数方法的发展(例如.,机器人)。
例如, Laumond 等人 [18] 用几何路线策划器构建了一条忽略机器人非完全约束的无障碍路线, 然后把几何线路分成更短的线路来满足非完全限制,然后应用最佳路线来减少路程。
在 [10] 和 [11]中, Guldner 等人使用间断变化的模式控制器迫使机器人的位置沿着位函数的负倾斜度变动,及其定位与负倾斜度一致。
在[1], [15], 和 [21]中,持续的位场控制器也保证了位函数的负倾斜度的位置追踪和定位追踪。
在[9]中,面对目标因为周边的障碍物而不能达到这一情况时,Ge和Cui 最近提出一种新的排斥的位函数的方法来解决这一问题。
在 [23]和[24]中, Tanner 等人采用[22] 中提出的导航函数研究和偶极位场概念为一个不完全移动操纵器建立导航函数控制器。
特别是, [23] 和 [24] 中的结果使用了间断控制器来追踪导航函数的负倾斜度, 在此过程中,一个不平坦的偶极位场使得机器人按照预想的定位拐入目标位置。
本文介绍了为不完全系统达到导航目标的两种不同的方法。
在第一个方法中, 产生了一个三维空间似导航函数的预想的轨道,它接近于机器人自由配置空间上的唯一最小值的目标位置和定位。
然后利用连续控制结构使机器人沿着这条路线走,在目标位置和定位点停下(例如,控制器解决一体化的追踪和调节问题)。
这种方法特别的地方是机器人根据预想的定位到达目标位置,而不需要像许多先前的结果中一样转弯。
正如 [4] 和 [20]中描述的一样, 一些因素如光线降低现象,更有效处罚离开预期周线的机器人的能力,使执行任务速度恒定的能力,以及达到任务协调性和同步性的能力提高等为按照目前位置和定位压缩预期轨道提供动机。
至于即时的二维空间问题设计一个连续控制器,沿着一个导航函数的负倾斜度驾驶机器人到达目标位置。
像许多先前的结果一样,在线二维空间方法的定位需要进一步发展 (例如, 一个单独的调节控制器,一个偶极位场方法[23], [24]; 或一个有效障碍物[9])来使机器人与预期的定位在一条线上。
模拟结果阐明了第二种方法的效果。
2 运动学模型本文所讨论的不完全系统的种类可以作为运动转轮的模型这里定义为在(1)中, 矩阵定义为速度向量定义为其中vc(t), ωc(t) ∈ R 表示系统线速度和角速度。
在(2)中, xc(t), yc(t),θ(t) ∈ R分别表示位置和定位,xc(t),yc(t) 表示线速度的笛卡尔成分,θ(t) ∈ R 表示角速度。
3 控制目标本文的控制目标是在一个有障碍物且混乱的环境下,沿着无碰撞轨道驾驶不完全系统(例如,机器人)到达不变的目标位置和定位,用表示。
特别是从起始位置和定位沿着轨道控制不完全系统,q∗∈ D, 这里的 D 表示一个自由的配置空间。
自由配置空间D是整个配置空间的子集,除去了所有含有障碍物碰撞的配置。
使轨道计划控制量化,实际笛卡尔位置和定位与预想的位置和定位之间的差异可表示为,定义为如下这里设计了预想的轨道,因此 qd(t) → q∗.[16]中,运用导航函数方法, 利用似导航函数生成预期路线qd(t)。
在本文中似导航函数有如下定义:定义1 把D作为连接解析流形和边界的纽带, 把q∗当作D内部的目标点. 似导航函数ϕ(q) :D →[0, 1] 是符合下列条件的函数:1. ϕ (q(t)) 第一个命令和可辨第二个命令 (例如,存在与D中的和)。
2. ϕ (q(t)) 在D的边界有最大变量。
3. ϕ (q(t)) 在 q (t) = q∗上有唯一的全局最小值.4. 如果,其中εz, εr ∈ R 是正常数。
5. 如果ϕ(q(t))被ε限制,那么被εr 限制,其中ε∈ R是正常数。
4 在线三维空间轨道计划4.1 轨道计划生成的预期的三维空间轨道如下:其中ϕ(q) ∈ R 表示定义1中定义的似导航函数, 表示ϕ(q)的倾斜向量,是另加的限制条件。
假设定义1中定义的似导航函数,沿着由(6)生成的预期轨道,确保了辅助条件N (·) ∈ R3, 表示为满足了下面的不等式其中正函数ρ (·) 在和中是不减少的。
(8) 中给的不等式将在以后的稳定性分析中用到。
4.2 模型转换为了达到控制目标,控制器必须能够追踪预期轨道,停在目标位置q∗上. 最后, 使用[7] 中提到的统一追踪和调节控制器。
为了改进[7]中的控制器,必须把(5)中定义的开路错误系统转换为合适的形式。
(5)中定义的位置和定位循迹误差信号通过以下全应可逆转换[8]和辅助循迹误差变量w(t) ∈ R 和有关。
运用 (9)中的时间导数和 (1)-(5)及(9)后, 根据(9)定义的辅助变数,循迹误差可表示为 [8]其中表示不相称矩阵,定义为定义为(10)中介绍的辅助控制输入根据和定义如下¸.4.3 控制发展为了促进控制发展, 一个辅助误差信号, 用表示, 是后来设计的动态似振荡器信号和转换的变量z(t)之间的差别,如下根据(10)中开路运动系统和后来的稳定性分析, 我们把 u(t)设计为[7]其中 k2 ∈ R 是正的不变的控制增长率。
(15)中介绍的辅助控制条件定义为其中辅助信号zd(t)由下列微分方程式和初始条件决定辅助条件Ω1(w, f, t) ∈ R and δd(t) ∈ R 分别为和, k1, α0, α1, ε 1 ∈ R是正的不变的控制增长率, 在(12)中有定义。
正如 [8]中描述的一样, (17)和(19)中结构是以以下事实为基础的根据(9), e (t) f能够用, 和表示出来,如下其中表示为在随后的稳定性分析推动下,附加的限制条件vr (t) 表示如下其中 k3, k4 ∈ R 是正的不变的控制增长率, 正函数ρ1 (zd1, z1, qd, e), ρ2 (zd1, z1, qd, e) ∈ R 表示为4.4 闭环误差系统把(15)替换到(10)中后, 得到含有w(t) 如下的公式这里利用了(14)和(11)中J的属性。
第二次出现 ua(t)时把(16)替换到(26)中,利用(20)和(11)中J的属性, 最终得到的w(t)闭环误差系统表达式如下为了确定闭环误差系统, 我们运用(14)中的时间导数,替换 (10) 和(17) 到最终表达式,达到下面的表达式替换(15)和(16)到(28), (28) 可以写成第二次出现Ω1 (t) 时,替换(18)到(29) ,然后删去相同部分,得到表达式:因为(30)中的相等条件和 (16)中定义的ua (t)是一样的, 得到闭环误差系统的最终表达式如下备注1根据(19)中δd (t )接近任意小常量,(16), (17),和(18)中禁止产生位奇点。
4.5 稳定性分析法则1 倘若qd (0) ∈ D, (6)中产生的预期轨道连同附加的限制条件vr (t) 保证了和,其中εr在定义1中有解释。
证明: 让V (t) ∈ R 表示下面的函数其中 k ∈ R 是一个正常数, V1 (t) ∈ R 表示下面的函数V2 (qd) : D → R 表示下面的一个函数运用(33)中时间导数,替换 (27) 和(31) 到最终的表达式,删去相同部分, 得到下面的表达式运用(34)中时间导数和(6), 得到下面的表达式其中 N (·) 在(7)中有定义。
根据 (8), V2 (t) 是上限,如下替换 (21)到(37), 得到下面的不等式其中向量表示如下正函数ρ1 (zd1, z1, qd, e) 和ρ2 (zd1, z1, qd, e)在(25)中有所定义。
替换 (24)到(38), V2 (t)可以重新写成如下根据 (35) 和 (40), (32)中 V (t)的时间导数可以按下面的不等式得到上限其中正常数表示如下.案例 1: 如果,根据定义1中属性4,得到案例 2: 如果,根据 (32), (33),(34), 和(41) 得到其中和是正常数. 根据 (42), V (t)得到上限如下因此根据 (32), (34), 和 (44),得到如果 qd (0)不在D的边界, ϕ(qd (0)) < 1, k 可以符合根据 (45) 和(46), ϕ(qd (t)) < 1, 因此从定义1得到qd (t) ∈ D,从(43) 可以得出,ϕ(qd) 最终被限制。
因此, 如果, k4 则符合 , 其中ε在定义1中有解释,进而在定义1的属性5中得到定义, 最终被εr限制。
法则2 (15)-(19)中运动学控制法保证全局统一最终限制的(GUUB) 位置和定位按下面公式追踪其中ε 1 在(19)中给定, , ε 3 和γ0 是正常数.证明: 根据 (33) 和(35), V1 (t) 得到上限如下根据 (48), 得到下面的不等式根据 (33), (49) 可以被写成其中向量Ψ1 (t)在(39)中有定义。