外文翻译-多自由度步行机器人
步行机器人中英文对照外文翻译文献
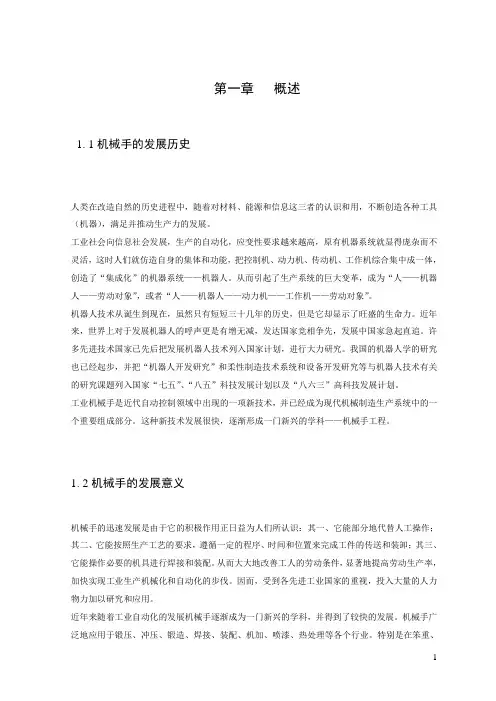
步行机器人中英文对照外文翻译文献(文档含英文原文和中文翻译)图1 远程脑系统的硬件配置图2 两组机器人的身体结构图3 传感器的两个水银定位开关图4 层次分类图5 步行步态该输入处理器是作为参考程序块和一个图像搜索窗口形象该大小的搜索窗口取决于参考块的大小通常高达16 * 16且匹配。
该处理器计算价值块在搜索窗口,还找到最佳匹配块,这就是其中的最低当目标平移时块匹配是非常有力的。
然而,普通的块匹配方法当它旋转时无法跟踪目标。
为了克服这一困难,我们开发了一种新方法,跟随真正旋转目标的图6 双足步行图6 双足步行图7 双足步行实验图8 一系列滚动和站立运动通过集成传感器网络转型的综合为了使上述描述的基本动作成为一体,我们通过一种方法来描述一种被认为是根据传感器状况的网络转型。
图9显示了综合了基本动作机器人的状态转移图:两足行走,滚动,坐着和站立。
这种一体化提供了机器人保持行走甚至跌倒时的problems and advance the study of vision-based behaviors, we have adopted a new approach through building remote-brained robots. The body and the brain are connected by wireless links by using wireless cameras and remote-controlled actuators.As a robot body does not need computers on-board,it becomes easier to build a lightweight body with many DOFS in actuation.In this research, we developed a two-armed bipedal robot using the remote-brained robot environment and made it to perform balancing based on vision and getting up through cooperating arms and legs. The system and experimental results are described below.2 The Remote-Brained SystemThe remote-brained robot does not bring its own brain within the body. It leaves the brain in the mother environment and communicates with it by radio links. This allows us to build a robot with a free body and a heavy brain. The connection link between the body and the brain defines the interface between software and hardware. Bodies are designed to suit each research project and task. This enables us advance in performing research with a variety of real robot systems[10].A major advantage of remote-brained robots is that the robot can have a large and heavy brain based on super parallel computers. Although hardware technology for vision has advanced and produced powerful compact vision systems, the size of the hardware is still large. Wireless connection between the camera and the vision processor has been a research tool. The remote-brained approach allows us to progress in the study of a variety of experimental issues in vision-based robotics.Another advantage of remote-brained approach is that the robot bodies can be lightweight. This opens up the possibility of working with legged mobile robots. AsFigure 4 shows some of the classes in the programming environent for remote-brained robot written in Euslisp. The hierachy in the classes provides us with rich facilities for extending development of various robots.4 Vision-Based BalancingThe robot can stand up on two legs. As it can change the gravity center of its body by controling the ankle angles, it can perform static bipedal walks. During static walking the robot has to control its body balance if the ground is not flat and stable.In order to perform vision-based balancing it is re-quired to have high speed vision system to keep ob-serving moving schene. We have developed a tracking vision board using a correlation chip[l3]. The vision board consists of a transputer augmented with a special LSI chip(MEP[14] : Motion Estimation Processor) which performs local image block matching.The inputs to the processor MEP are an image as a reference block and an image for a search window.The size of the reference blsearch window depends on the size of the reference block is usually up to 32 by 32 pixels so that it can include 16 * 16 possible matches. The processor calculates 256 values of SAD (sum of absolute difference) between the reference block and 256 blocks in the search window and also finds the best matching block, that is, the one which has the minimum SAD value.Clock is up to 16 by 16 pixels.The size of the search window depends on the size of the reference block is usually up to 32 by 32 pixels so that it can include 16 * 16 possible matches. The processor calculates 256 values of SAD (sum of absolute difference) between the reference block and 256 blocks in the search window and also finds the best matching block, that is, the one which has the minimum SAD value.Block matching is very powerful when the target moves only in translation. However, the ordinary block matching method cannot track the target when it rotates. In order to overcome this difficulty, we developed a new method which follows up the candidate templates to real rotation of the target. The rotated template method first generates all the rotated target images in advance, and several adequate candidates of the reference template are selected and matched is tracking the scene in the front view. It remembers the vertical orientation of an object as the reference for visual tracking and generates several rotated images of the reference image. If the vision tracks the reference object using the rotated images, it can measures the body rotation. In order to keep the body balance, the robot feedback controls its body rotation to control the center of the body gravity. The rotational visual tracker[l5] can track the image at video rate.5 Biped WalkingIf a bipedal robot can control the center of gravity freely, it can perform biped walk. As the robot shown in Figure 2 has the degrees to left and right directions at the ankle position, it can perform bipedal walking in static way.The motion sequence of one cycle in biped walking consists of eight phases as shown in Figure 6. One step consists of four phases; move-gravity-center-on-foot,lift-leg, move-forward-leg, place-leg. As the body is described in solid model, the robot can generate a body configuration for move-gravity-center-on-foot according to the parameter of the hight of the gravity center. After this movement, the robot can lift the other leg and move it forward. In lifting leg, the robot has to control the configuration in order to keep the center of gravity above the supporting foot. As the stability in balance depends on the hight of the gravity center, the robot selects suitable angles of the knees.Figure 7 shows a sequence of experiments of the robot in biped walking6 Rolling Over and Standing UpFigure 8 shows the sequence of rolling over, sitting and standing up. This motion requires coordination between arms and legs.As the robot foot consists of a battery, the robot can make use of the weight of the battery for the roll-over motion. When the robot throws up the left leg and moves the left arm back and the right arm forward, it can get rotary moment around the body. If the body starts turning, the right leg moves back and the left foot returns its position to lie on the face. This rollover motion changes the body orientation from face up to face down. It canbe verified by the orientation sensor.After getting face down orientation, the robot moves the arms down to sit on two feet. This motion causes slip movement between hands and the ground. If the length of the arm is not enough to carry the center of gravity of the body onto feet, this sitting motion requires dynamic pushing motion by arms. The standing motion is controlled in order to keep the balance.7 Integration through Building Sensor-Based Transition NetIn order to integrate the basic actions described above, we adopted a method to describe a sensor-based transition network in which transition is considered according to sensor status. Figure 9 shows a state transition diagram of the robot which integrates basic actions: biped walking, rolling over, sitting, and standing up. This integration provides the robot with capability of keeping walking even when it falls down.The ordinary biped walk is composed by taking two states, Left-leg Fore and Right-leg Fore, successively.The poses in ‘Lie on the Back’ and ‘Lie on the Face’are as same as one in ‘Stand’. That is, the shape ofthe robot body is same but the orientation is different.The robot can detect whether the robot lies on the back or the face using the orientation sensor. When the robot detects falls down, it changes the state to ‘Lie on the Back’ or ‘Lie on the Front’ by moving to the neutral pose. If the robot gets up from ‘Lie on the Back’, the motion sequence is planned to exe cute Roll-over, Sit and Stand-up motions. If the state is ‘Lie on the Face’, it does not execute Roll-over but moves arms up to perform the sitting motion.8 Concluding RemarksThis paper has presented a two-armed bipedal robot which can perform statically biped walk, rolling over and standing up motions. The key to build such behaviors is the remote-brained approach. As the experiments have shown, wireless technologies permit robot bodies free movement. It also seems to change the way we conceptualize robotics. In our laboratory it has enabled the development of a new research environment, better suited to robotics and real-world AI.The robot presented here is a legged robot. As legged locomotion requires dynamic visual feedback control, its vision-based behaviors can prove the effectiveness of the vision system and the remote-brained system. Our vision system is based on high speed block matching function implemented with motion estimation LSI. The vision system provides the mechanical bodies with dynamic and adaptive capabilities in interaction with human. The mechanical dog has shown adaptive behaviors based on distance。
多自由度步行机器人外文文献翻译
本科生毕业设计 (论文)外文翻译原文标题Multi-degree of freedom walking robot up 译文标题多自由度步行机器人作者所在系别作者所在专业作者所在班级作者姓名作者学号指导教师姓名指导教师职称完成时间2017 年 3 月北华航天工业学院教务处制图1 远程脑系统的硬件配置图2 两组机器人的身体结构图3 传感器的两个水银定位开关图5 步行步态该输入处理器是作为参考程序块和一个图像搜索窗口形象该大小的搜索窗口取决于参考块的大小通常高达16 * 16且匹配。
该处理器计算价值块在搜索窗口,还找到最佳匹配块,这就是其中的最低当目标平移时块匹配是非常有力的。
然而,普通的块匹配方法当它旋转时无法跟踪目标。
为了克服这一困难,我们开发了一种新方法,跟随真正旋转目标的候选模板。
旋转模板法首先生成所有目标图像旋转,并且几个足够的候选参考模图6 双足步行图6 双足步行图7 双足步行实验个坐的运动要求有手臂来推动运动。
站立运动是被控制的,以保持平衡。
图8 一系列滚动和站立运动:具有起身能力的双足步行机器人的状态转换通过集成传感器网络转型的综合2 The Remote-Brained SystemThe remote-brained robot does not bring its own brain within the body. It leaves mother environment and communicates with4 Vision-Based BalancingThe robot can stand up on two legs. As it can change the gravity center of its5 Biped Walkingrobot can control the center of gravity freely, itwalk. As the robot shown in Figure 2 has the degrees to left and right directions at the ankle position, it can perform bipedal walking in static way.sequence of one cycle in biped walking consists of eightshown in Figure 6. One step consists offourphases; move-gravity-center-on-foot,lift-leg, place-leg. As the body is described in solidconfiguration for move-gravity-center-on-foot7 Integration through Building Sensor-Based Transition Net注:1. 指导教师对译文进行评阅时应注意以下几个方面:①翻译的外文文献与毕业设计(论文)的主题是否高度相关,并作为外文参考文献列入毕业设计(论文)的参考文献;②翻译的外文文献字数是否达到规定数量(3 000字以上);③译文语言是否准确、通顺、具有参考价值。
机械手臂外文翻译
外文出处:《Manufacturing Engineering and Technology—Maching》附件1:外文原文ManipulatorFirst, an overview of industrial manipulatorWith the rapid development of China's industrial production, especially the reform and openingup after the rapid increase in the degree of automation to achieve the workpiece handling, steering,transmission or operation of brazing, spray gun, wrenches and other tools for processing and assembly operations since, which has more and more attracted our attention. Robot is to imitate the manual part of the action, according to a given program, track and requirements for automatic capture, handling or operation of the automatic mechanical devices.Production of mechanical hand can increase the automation level of production and labor productivity; can reduce labor intensity, ensuring product quality, to achieve safe production; particularly in the high-temperature, high pressure, low temperature, low pressure, dust, explosive, toxic andradioactive gases such as poor environment can replace the normal working people. Here I would like to think of designing a robot to be used in actual production.Why would a robot designed to provide a pneumatic power:1." Air inexhaustible, used later discharged into the atmosphere, does not require recycling and disposal, do not pollute the environment. (Concept of environmental protection)2." Air stick is small, the pipeline pressure loss is small (typically less than asphalt gas path pressure drop of one-thousandth), to facilitate long-distance transport.5." The air cleaner media, it will not degenerate, not easy to plug the pipeline. But there are also places where it fly in the ointment:2." As the use of low atmospheric pressure, the output power can notbe too large; in order to increase the output power is bound to the structure of the entire pneumaticsystem size increased.Air inexhaustible, used later discharged into the atmosphere, without recycling and disposal, donot pollute the environment. Accidental or a small amount of leakage would not be a serious impact on production. Viscosity of air is small, the pipeline pressure loss also is very small, easy long-distance transport.Compared with the hydraulic transmission, and its faster action and reaction, which is one of the outstanding merits of pneumatic.1.Implementing agencies2. Transmission3. Control SystemRobots are generally divided into three categories:Main features:First, mechanical hand (the upper and lower material robot, assembly robot, handling robot, stacking robot, help robot, vacuum handling machines, vacuum suction crane, labor-saving spreader, pneumatic balancer, etc.).Second, cantilever cranes (cantilever crane, electric chain hoist crane, air balance the hanging, etc.)Third, rail-type transport system (hanging rail, light rail, single girder cranes, double-beam crane)Four, industrial machinery, application of hand(3) The working conditions may be poor, monotonous, repetive easy to sub-fatigue working environment to replace human labor.(4) May be in dangerous situations, such as military goods handling, dangerous goods and hazardous materials removal and so on..(5) Universe and ocean development.(6), military engineering and biomedical research and testing.Help mechanical hands:附件1:外文资料翻译译文机械手机械手是近几十年发展起来的一种高科技自动化生产设备。
斯帕特名词解释
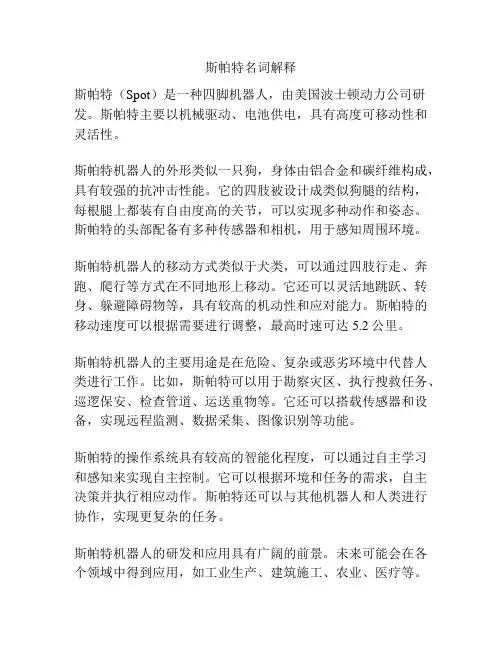
斯帕特名词解释
斯帕特(Spot)是一种四脚机器人,由美国波士顿动力公司研发。
斯帕特主要以机械驱动、电池供电,具有高度可移动性和灵活性。
斯帕特机器人的外形类似一只狗,身体由铝合金和碳纤维构成,具有较强的抗冲击性能。
它的四肢被设计成类似狗腿的结构,每根腿上都装有自由度高的关节,可以实现多种动作和姿态。
斯帕特的头部配备有多种传感器和相机,用于感知周围环境。
斯帕特机器人的移动方式类似于犬类,可以通过四肢行走、奔跑、爬行等方式在不同地形上移动。
它还可以灵活地跳跃、转身、躲避障碍物等,具有较高的机动性和应对能力。
斯帕特的移动速度可以根据需要进行调整,最高时速可达5.2公里。
斯帕特机器人的主要用途是在危险、复杂或恶劣环境中代替人类进行工作。
比如,斯帕特可以用于勘察灾区、执行搜救任务、巡逻保安、检查管道、运送重物等。
它还可以搭载传感器和设备,实现远程监测、数据采集、图像识别等功能。
斯帕特的操作系统具有较高的智能化程度,可以通过自主学习和感知来实现自主控制。
它可以根据环境和任务的需求,自主决策并执行相应动作。
斯帕特还可以与其他机器人和人类进行协作,实现更复杂的任务。
斯帕特机器人的研发和应用具有广阔的前景。
未来可能会在各个领域中得到应用,如工业生产、建筑施工、农业、医疗等。
斯帕特的出现将进一步推动机器人技术的发展,为人类创造更多便利和安全的工作环境。
工业机械手外文文献翻译、中英文翻译
第一章概述1. 1机械手的发展历史人类在改造自然的历史进程中,随着对材料、能源和信息这三者的认识和用,不断创造各种工具(机器),满足并推动生产力的发展。
工业社会向信息社会发展,生产的自动化,应变性要求越来越高,原有机器系统就显得庞杂而不灵活,这时人们就仿造自身的集体和功能,把控制机、动力机、传动机、工作机综合集中成一体,创造了“集成化”的机器系统——机器人。
从而引起了生产系统的巨大变革,成为“人——机器人——劳动对象”,或者“人——机器人——动力机——工作机——劳动对象”。
机器人技术从诞生到现在,虽然只有短短三十几年的历史,但是它却显示了旺盛的生命力。
近年来,世界上对于发展机器人的呼声更是有增无减,发达国家竞相争先,发展中国家急起直追。
许多先进技术国家已先后把发展机器人技术列入国家计划,进行大力研究。
我国的机器人学的研究也已经起步,并把“机器人开发研究”和柔性制造技术系统和设备开发研究等与机器人技术有关的研究课题列入国家“七五”、“八五”科技发展计划以及“八六三”高科技发展计划。
工业机械手是近代自动控制领域中出现的一项新技术,并已经成为现代机械制造生产系统中的一个重要组成部分。
这种新技术发展很快,逐渐形成一门新兴的学科——机械手工程。
1. 2机械手的发展意义机械手的迅速发展是由于它的积极作用正日益为人们所认识:其一、它能部分地代替人工操作;其二、它能按照生产工艺的要求,遵循一定的程序、时间和位置来完成工件的传送和装卸;其三、它能操作必要的机具进行焊接和装配。
从而大大地改善工人的劳动条件,显著地提高劳动生产率,加快实现工业生产机械化和自动化的步伐。
因而,受到各先进工业国家的重视,投入大量的人力物力加以研究和应用。
近年来随着工业自动化的发展机械手逐渐成为一门新兴的学科,并得到了较快的发展。
机械手广泛地应用于锻压、冲压、锻造、焊接、装配、机加、喷漆、热处理等各个行业。
特别是在笨重、高温、有毒、危险、放射性、多粉尘等恶劣的劳动环境中,机械手由于其显著的优点而受到特别重视。
工业机器人外文翻译
中文2840字外文资料INDYSTIAL ROBOTSThere are a variety of definitions of the term robot.Depending on the definitino used,the number of robot installatinos wordwide varies widely.Numerous single-purpose machines are used in manufacturing plants that might appear to be robots.These machines are hardwired to perform a single function and cannot be reprogrammed to perform a different function.Such single-purpose machines do not fit the definition for industrial robots that is becoming widely accepted.This definition was developed by the Robot Institute of America.A robot is a reprogrammable multifunctional manipulator designed to move material, parts, tools, or specialized devices through variable programmed motions for the performance of a variety of tasks.Note that this definition contains the words reprogrammable and multifunctional.It is these two characteristics that separate the true industrial robot form the various single-purpose machines used in modern manufacturing firms.The term “reprogrammable” implies two things: The robot operates according to a written program,and this program can be rewriten to accommodate a variety of manufacturning tasks.The term “multifunctional” means that the robot can, through reprogramming and the use of different end-dffectors, perform a number of different manufacturing tasks.Definitions written around these two critical characteristics are becoming the accepted definitions among manufacturing professioals.The first articulated arm came about in 1951 and was used by the U.S.Atomic Energy Commission.In 1945,the first programmable robot was designed by George Devol.It was based on two important technologies:(1) Numerical control (NC) technology.(2) Remote manipulation technology.Numerical control technology provided a form of machine control ideally suited to robots.It allowed for the control of motion by stored programs.These programs contain data points to which the robot sequentially moves, timing signals to initiste action and to stop movement, and logic statements to allow for decision making.Remote manipulator technology allowed a machines to be more than just anotherNC machine.It allowed such machines to become robots that can perform a variety of manufacturing tasks in both inaccessible and unsafe environments.By merging these two technologies, Devol developed the first industrial robot, an unsophisticated programmable materials handling machine.The first commercially produced robot was developed in 1959.In 1962, the first industrial robot to be used on a production line was installed by General Motors Corporation.This robot was produced by Unimation.A major step forward in robot control occurred in 1973 with the development of the T-3 industrial robot controlled bya minicomputer.Numerical control and remote and remote manipulator technology prompted the wide-scale development and use of industrial robots.But major technological developments do not take place simply because of such new capabilities.Something must provide the impetus for taking advantage of these capabilities.In the case of industrial robots, the impetus was economics.The rapid inflation of wages experienced in the 1970s tremendously increased the personnel costs of manufacturing firms.At the same time, foreign competition became a serious problem for U.S.manefacturers.Foreign manufacturers who had undertaken automation on a wide-scale basis, such as those in Japan, began to gain an increaaingly large share of the U.S.and world market for manufactured goods, particullarly automobiles.Through a variety of automation techniques, including robots, Japanese manufacturers, beginning in the 1970s, were able to produce better automobiles more cheaply than nonautomated U.S.manufacturers.Consequently, in order to survive, U.S.manufacturers were forced to consider any technological developments that could help improve productivity.It become imperative to produce better products at lower costs in order to be competitive with foreign manufacturers.Other factors such as the need to find better ways of performing dangerous manufacturing tasks contributed to the development of industrial robots.However, the principal rationale has always been, and is still, improved productivity.One of the principal advantages of robots is that they can be used in settings that are dangerous to humans.Welding and parting are examples of applications where robots can be used more safely than humans.Even though robots are closely associsted with safety in the workplace, they can, in themselves, be dangerous.Robots and robot cells must be carefully designed and cinfigured so that they do not endanger human workers and other machines.Robot work envelopes should be accurately calculated and a danger zone surrounding the envelope clearly marked off.Red flooring strips and barriers can be used to keep human workers out of a robot is work envelope.Even with such precautions it is still a good idea to have an automatic shutdown system in situations where robots are used.Such a system should have the capacity to sense the need for an automatic shutdown of operations.Fault-tolerant computers and redundant systems can be installed to ensure proper shutdown of robotics systems to ensure a safe environment.The components of a tobot systerm could be discussed either forma physical of view or from a systems point of ciew.Physically, we would divide the system into the robot, power system, and controller(computer).Likewise, the robot itself could be partitioned anthropomorphically into base, shoulder, elbow, wrist, gripper, and tool.Most of these terms require little explanation.Consequently, we will describe the components of a tobot system from the point of view of information transfer.That is, what information or signal enters the component; what logical or arithmetic operation does the component perform; and what information or signal does the component produce? It is important to note that the same physical component may perform many different information processing operations (e.g., a central computer performs many different calculations on different data ).Likewise, two physically separate components may perform identical information operations (e.g., the shoulder and elbow actuators both convert signals to motion in very similar ways).Actuator Associated with each joint on the robot is an actuator which causes that joint to move.Typical actuators are electric motors and hydtraulic cylinders.Typically, a robot system will contain six actuators, since six are required for full control of position and orientation.Many robot applications do not require this full flexibility, and consequently, robots are often built with five or fewer actuators.Sensor To control and actuator, the computer must have information regarding the posetion and possibly the velocity of the actuator.In this contest, the term position refers to a displacement from some arbitrary zero reference point for that actuator.For example, in the case of a rotary actuator, “ position ” would really the angular posit ionand be measured in radians.Many types of sensors can provide indications of position and velocity.The various types of sensors require different menchanisms for interfacing to the computer.In addition, the industrial use of the manipulator requires that the interface be protected from the harsh electrical environment of the factroy.Sources of electrical noise such as are welders and large motors can easily make a digital system useless unless care is taken in design and construction of the interface.C omputation We could easily have labeled the computation module “ computer , ” as most of the function to be described are typically performed by digital computer.However, many of the functions may be performed in dedicated custom hardware or networks of the computers.We will, thus, discuss the computational component as if it were a simple computer, recognizing that the need for real-time control may require special equipment and that some of this equipment may even be analog, although the current trend is toward fully digital systems.One further note: We will tend to avoid the use of the term microprocessor in this book and simply say computer, although many current robot manufacturers use one or more microprocessors in their systerms.The computation component performs the following operations:Servo Given the current position and/or velocity of an actuator,determine the appropriate drive signal to move that actuator toward its desired position.This operation must be performed for each actuator.Kinematics Given the current state of the actuators ( position and velocity ), determine the current state of the gripper.Conversely, given a desired state of the hand, determine the desired state for each actuator.Dynamics Given konwledge of the loads on the arm ( inertia, friction, gravity, acceleration ), use this information to adjust the servo operation to achieve better performance.Workplace Sensor Analysis Given knowledge of the task to be performed, determine appropriate robot motion commands.This may include analyzing a TV picture of the workplace or measuring and compensating for forces applied at the hand.In addition to these easily identified components, there are also supervisory operations such as path planning and operator interaction.工业机器人有许多关于机器人这个术语的定义。
机械手中英文对照外文翻译文献
机械手中英文对照外文翻译文献机械手机械手是近几十年发展起来的一种高科技自动化生产设备。
作为工业机器人的一个重要分支,机械手可通过编程来完成各种预期的作业任务,并兼有人和机器各自的优点,尤其体现了人的智能和适应性。
机械手作业的准确性和各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景。
随着工业自动化的发展,数控加工中心在减轻工人劳动强度的同时,提高了劳动生产率。
然而,数控加工中常见的上下料工序,通常仍采用人工操作或传统继电器控制的半自动化装置。
前者费时费工、效率低,后者则存在可靠性差、故障多、维修困难等问题。
因此,可编程序控制器PLC控制的上下料机械手控制系统成为了一种更为优越的选择,它具有动作简便、线路设计合理、抗干扰能力强和可靠性高等优点,可以保证系统运行的稳定性,降低维修率,提高工作效率。
机械手技术涉及到力学、机械学、电气液压技术、自动控制技术、传感器技术和计算机技术等科学领域,是一门跨学科综合技术。
一、工业机械手的概述机械手是一种能自动化定位控制并可重新编程序以变动的多功能机器,它有多个自由度,可用来搬运物体以完成在各个不同环境中工作。
在中国,尽管塑料制品行业仍属于劳动力密集型,但机械手的使用已经越来越普及。
那些设在中国的欧美跨国公司很早就在工厂中引进了自动化生产。
但现在的变化是分布在工业密集的华南、华东沿海地区的中国本土塑料加工厂也开始对机械手表现出越来越浓厚的兴趣,因为他们要面对工人流失率高,以及为工人交工伤费带来的挑战。
随着我国工业生产的飞跃发展,特别是改革开发以后,自动化程度的迅速提高,实现工件的装卸、转向、输送或操作钎焊、喷枪、扳手等工具进行加工、装配等作业自化,已愈来愈引起我们重视。
机械手是模仿着人手的部分动作,按给定的程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。
在现实生活中,加工零件装料的过程繁琐,劳动生产率不高,生产成本大,有时还会发生人为事故,导致加工者受伤。
工业机器人外文翻译教学提纲
附录外文文献原文Industrial RobotsDefinition“A robot is a reprogrammable,multifunctional machine designed to manipulate materials,parts,tools,or specialized devices,through variable programmed motions for the performance of a variety of tasks.”--Robotics Industries Association “A robot is an automatic device that performs functions normally ascribrd to humans or a machine in orm of a human.”--Websters Dictionary The industrial robot is used in the manufacturing environment to increase productivity . It can be used to do routine and tedious assembly line jobs , or it can perform jobs that might be hazardous to do routine and tedious assembly line jobs , or it can perform jobs that might be hazardous to the human worker . For example , one of the first industrial robots was used to replace the nuclear fuel rods in nuclear power plants . A human doing this job might be exposed to harmful amounts of radiation . The industrial robot can also operate on the assembly line , putting together small components , such as placing electronic components on a printed circuit board . Thus , the human worker can be relieved of the routine operation of this tedious task . Robots can also be programmed to defuse bombs , to serve the handicapped , and to perform functions in numerous applications in our society .The robot can be thought of as a machine that will move an end-of-arm tool , sensor , and gripper to a preprogrammed location . When the robot arrives at this location , it will perform some sort of task . This task could be welding , sealing , machine loading , machine unloading , or a host of assembly jobs . Generally , this work can be accomplished without the involvement of a human being , except for programming and for turning the system on and off .The basic terminology of robotic systems is introduced in the following :1. A robot is a reprogrammable , multifunctional manipulator designed to move parts , materials , tools , or special devices through variable programmed motions for the performance of a variety of different task . This basic definition leads to other definitions , presented in the following paragraphs , that give a complete picture of a robotic system .2. Preprogrammed locations are paths that the robot must follow to accomplish work . At some of these locations , the robot will stop and perform some operation , such as assembly of parts , spray painting , or welding . These preprogrammed locations are stored in the robot’s mem ory and are recalled later for continuous operation . Furthermore , these preprogrammed locations , as well as other program data , can be changed later as the work requirements change . Thus , with regard to this programming feature , an industrial robot is very much like a computer , where data can be stored and later recalled and edited .3. The manipulator is the arm of the robot . It allows the robot to bend , reach , and twist . This movement is provided by the manipulator’s axes , also called the degrees of freedom of the robot . A robot can have from 3 to 16 axes . The term degrees of freedom of freedom will always relate to the number of axes found on a robot .4. The tooling and grippers are not part of the robotic system itself ; rather , they are attachments that fit on the end of the robot’s arm . These attachments connected to the end of the robot’s arm allow the robot to lift parts , spot-weld , paint , arc-weld , drill , deburr , and do a variety of tasks , depending on what is required of the robot .5. The robotic system can also control the work cell of the operating robot . the work cell of the robot is the total environment in which the robot must perform its task . Included within this cell may be the controller , the robot manipulator , a work table , safety features , or a conveyor . All the equipment that is required in order for the robot to do its job is included in the work cell . In addition , signals from outside devices can communicate with the robot in order to tell the robot when it should assemble parts , pick up parts , or unload parts to a conveyor .The robotic system has three basic components : the manipulator , the controller ,and the power source .A . ManipulatorThe manipulator , which does the physical work of the robotic system , consists of two sections : the mechanical section and the attached appendage . The manipulator also has a base to which the appendages are attached . Fig.1 illustrates the connection of the base and the appendage of a robot .The base of the manipulator is usually fixed to the floor of the work area . Sometimes , though , the base may be movable . In this case , the base is attached to either a rail or a track , allowing the manipulator to be moved from one location to another .As mentioned previously , the appendage extends from the base of the robot . The appendage is the arm of the robot . It can be either a straight , movable arm or a jointed arm . the jointed arm is also known as an articulated arm .The appendages of the robot manipulator give the manipulator its various axes of motion . These axes are attached to a fixed base , which , in turn , is secured to a mounting . This mounting ensures that the manipulator will remain in one location。
机器人外文翻译(中英文翻译)
机器人外文翻译(中英文翻译)机器人外文翻译(中英文翻译)With the rapid development of technology, the use of robots has become increasingly prevalent in various industries. Robots are now commonly employed to perform tasks that are dangerous, repetitive, or require a high level of precision. However, in order for robots to effectively communicate with humans and fulfill their intended functions, accurate translation between different languages is crucial. In this article, we will explore the importance of machine translation in enabling robots to perform translation tasks, as well as discuss current advancements and challenges in this field.1. IntroductionMachine translation refers to the use of computer algorithms to automatically translate text or speech from one language to another. The ultimate goal of machine translation is to produce translations that are as accurate and natural as those generated by human translators. In the context of robots, machine translation plays a vital role in allowing them to understand and respond to human commands, as well as facilitating communication between robots of different origins.2. Advancements in Machine TranslationThe field of machine translation has experienced significant advancements in recent years, thanks to breakthroughs in artificial intelligence and deep learning. These advancements have led to the development of neural machine translation (NMT) systems, which have greatly improved translation quality. NMT models operate by analyzinglarge amounts of bilingual data, allowing them to learn the syntactic and semantic structures of different languages. As a result, NMT systems are capable of providing more accurate translations compared to traditional rule-based or statistical machine translation approaches.3. Challenges in Machine Translation for RobotsAlthough the advancements in machine translation have greatly improved translation quality, there are still challenges that need to be addressed when applying machine translation to robots. One prominent challenge is the variability of language use, including slang, idioms, and cultural references. These nuances can pose difficulties for machine translation systems, as they often require a deep understanding of the context and cultural background. Researchers are currently working on developing techniques to enhance the ability of machine translation systems to handle such linguistic variations.Another challenge is the real-time requirement of translation in a robotic setting. Robots often need to process and translate information on the fly, and any delay in translation can affect the overall performance and efficiency of the robot. Optimizing translation speed without sacrificing translation quality is an ongoing challenge for researchers in the field.4. Applications of Robot TranslationThe ability for robots to translate languages opens up a wide range of applications in various industries. One application is in the field of customer service, where robots can assist customers in multiple languages, providing support and information. Another application is in healthcare settings, where robots can act as interpreters between healthcare professionals and patientswho may speak different languages. Moreover, in international business and diplomacy, robots equipped with translation capabilities can bridge language barriers and facilitate effective communication between parties.5. ConclusionIn conclusion, machine translation plays a crucial role in enabling robots to effectively communicate with humans and fulfill their intended functions. The advancements in neural machine translation have greatly improved translation quality, but challenges such as language variability and real-time translation requirements still exist. With continuous research and innovation, the future of machine translation for robots holds great potential in various industries, revolutionizing the way we communicate and interact with technology.。
机器人外文文献翻译、中英文翻译
外文资料robotThe industrial robot is a tool that is used in the manufacturing environment to increase productivity. It can be used to do routine and tedious assembly line jobs,or it can perform jobs that might be hazardous to the human worker . For example ,one of the first industrial robot was used to replace the nuclear fuel rods in nuclear power plants. A human doing this job might be exposed to harmful amounts of radiation. The industrial robot can also operate on the assembly line,putting together small components,such as placing electronic components on a printed circuit board. Thus,the human worker can be relieved of the routine operation of this tedious task. Robots can also be programmed to defuse bombs,to serve the handicapped,and to perform functions in numerous applications in our society.The robot can be thought of as a machine that will move an end-of-tool ,sensor ,and/or gripper to a preprogrammed location. When the robot arrives at this location,it will perform some sort of task .This task could be welding,sealing,machine loading ,machine unloading,or a host of assembly jobs. Generally,this work can be accomplished without the involvement of a human being,except for programming and for turning the system on and off.The basic terminology of robotic systems is introduced in the following:1. A robot is a reprogrammable ,multifunctional manipulator designed to move parts,material,tool,or special devices through variable programmed motions for the performance of a variety of different task. This basic definition leads to other definitions,presented in the following paragraphs,that give acomplete picture of a robotic system.2. Preprogrammed locations are paths that the robot must follow to accomplish work,At some of these locations,the robot will stop and perform some operation ,such as assembly of parts,spray painting ,or welding .These preprogrammed locations are stored in the robot’s memory and are recalled later for continuousoperation.Furthermore,these preprogrammed locations,as well as other program data,can be changed later as the work requirements change.Thus,with regard to this programming feature,an industrial robot is very much like a computer ,where data can be stoned and later recalled and edited.3. The manipulator is the arm of the robot .It allows the robot to bend,reach,and twist.This movement is provided by the manipulator’s axes,also called the degrees of freedom of the robot .A robot can have from 3 to 16 axes.The term degrees of freedom will always relate to the number of axes found on a robot.4. The tooling and frippers are not part the robotic system itself;rather,they are attachments that fit on the end of the robot’s arm. These attachments connected to the end of the robot’s arm allow the robot to lift parts,spot-weld ,paint,arc-weld,drill,deburr,and do a variety of tasks,depending on what is required of the robot.5. The robotic system can control the work cell of the operating robot.The work cell of the robot is the total environment in which the robot must perform itstask.Included within this cell may be the controller ,the robot manipulator ,a work table ,safety features,or a conveyor.All the equipment that is required in order for the robot to do its job is included in the work cell .In addition,signals from outside devices can communicate with the robot to tell the robot when it should parts,pick up parts,or unload parts to a conveyor.The robotic system has three basic components: the manipulator,the controller,and the power source.A.ManipulatorThe manipulator ,which does the physical work of the robotic system,consists of two sections:the mechanical section and the attached appendage.The manipulator also has a base to which the appendages are attached.Fig.1 illustrates the connectionof the base and the appendage of a robot.图1.Basic components of a robot’s manipulatorThe base of the manipulator is usually fixed to the floor of the work area. Sometimes,though,the base may be movable. In this case,the base is attached to either a rail or a track,allowing the manipulator to be moved from one location to anther.As mentioned previously ,the appendage extends from the base of the robot. The appendage is the arm of the robot. It can be either a straight ,movable arm or a jointed arm. The jointed arm is also known as an articulated arm.The appendages of the robot manipulator give the manipulator its various axes of motion. These axes are attached to a fixed base ,which,in turn,is secured to a mounting. This mounting ensures that the manipulator will in one location.At the end of the arm ,a wrist(see Fig 2)is connected. The wrist is made up of additional axes and a wrist flange. The wrist flange allows the robot user to connect different tooling to the wrist for different jobs.图2.Elements of a work cell from the topThe manipulator’s axes allow it to perform work within a certain area. The area is called the work cell of the robot ,and its size corresponds to the size of the manipulator.(Fid2)illustrates the work cell of a typical assembly ro bot.As the robot’s physical size increases,the size of the work cell must also increase.The movement of the manipulator is controlled by actuator,or drive systems.The actuator,or drive systems,allows the various axes to move within the work cell. The drive system can use electric,hydraulic,or pneumatic power.The energy developed by the drive system is converted to mechanical power by various mechanical power systems.The drive systems are coupled through mechanical linkages.These linkages,in turn,drive the different axes of the robot.The mechanical linkages may be composed of chain,gear,and ball screws.B.ControllerThe controller in the robotic system is the heart of the operation .The controller stores preprogrammed information for later recall,controls peripheral devices,and communicates with computers within the plant for constant updates in production.The controller is used to control the robot manipulator’s movements as well as to control peripheral components within the work cell. The user can program the movements of the manipulator into the controller through the use of a hard-held teach pendant.This information is stored in the memory of the controller for later recall.The controller stores all program data for the robotic system.It can store several differentprograms,and any of these programs can be edited.The controller is also required to communicate with peripheral equipment within the work cell. For example,the controller has an input line that identifies when a machining operation is completed.When the machine cycle is completed,the input line turn on telling the controller to position the manipulator so that it can pick up the finished part.Then ,a new part is picked up by the manipulator and placed into the machine.Next,the controller signals the machine to start operation.The controller can be made from mechanically operated drums that step through a sequence of events.This type of controller operates with a very simple robotic system.The controllers found on the majority of robotic systems are more complex devices and represent state-of-the-art eletronoics.That is,they are microprocessor-operated.these microprocessors are either 8-bit,16-bit,or 32-bit processors.this power allows the controller to be very flexible in its operation.The controller can send electric signals over communication lines that allow it to talk with the various axes of the manipulator. This two-way communication between the robot manipulator and the controller maintains a constant update of the end the operation of the system.The controller also controls any tooling placed on the end of the robot’s wrist.The controller also has the job of communicating with the different plant computers. The communication link establishes the robot as part a computer-assisted manufacturing (CAM)system.As the basic definition stated,the robot is a reprogrammable,multifunctional manipulator.Therefore,the controller must contain some of memory stage. The microprocessor-based systems operates in conjunction with solid-state devices.These memory devices may be magnetic bubbles,random-access memory,floppy disks,or magnetic tape.Each memory storage device stores program information fir or for editing.C.power supplyThe power supply is the unit that supplies power to the controller and the manipulator. The type of power are delivered to the robotic system. One type of power is the AC power for operation of the controller. The other type of power isused for driving the various axes of the manipulator. For example,if the robot manipulator is controlled by hydraulic or pneumatic drives,control signals are sent to these devices causing motion of the robot.For each robotic system,power is required to operate the manipulator .This power can be developed from either a hydraulic power source,a pneumatic power source,or an electric power source.There power sources are part of the total components of the robotic work cell.中文翻译机器人工业机器人是在生产环境中用以提高生产效率的工具,它能做常规乏味的装配线工作,或能做那些对于工人来说是危险的工作,例如,第一代工业机器人是用来在核电站中更换核燃料棒,如果人去做这项工作,将会遭受有害放射线的辐射。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
多自由度步行机器人摘要在现实生活中设计一款不仅可以倒下而且还可以站起来的机器人灵活智能机器人很重要。
本文提出了一种两臂两足机器人,即一个模仿机器人,它可以步行、滚动和站起来。
该机器人由一个头,两个胳膊和两条腿组成。
基于远程控制,设计了双足机器人的控制系统,解决了机器人大脑内的机构无法与无线电联系的问题。
这种远程控制使机器人具有强大的计算头脑和有多个关节轻盈的身体。
该机器人能够保持平衡并长期使用跟踪视觉,通过一组垂直传感器检测是否跌倒,并通过两个手臂和两条腿履行起立动作。
用实际例子对所开发的系统和实验结果进行了描述。
1 引言随着人类儿童的娱乐,对于设计的双足运动的机器人具有有站起来动作的能力是必不可少。
为了建立一个可以实现两足自动步行的机器人,设计中感知是站立还是否躺着的传感器必不可少。
两足步行机器人它主要集中在动态步行,作为一种先进的控制问题来对待它。
然而,在现实世界中把注意力集中在智能反应,更重要的是创想,而不是一个不会倒下的机器人,是一个倒下来可以站起来的机器人。
为了建立一个既能倒下又能站起来的机器人,机器人需要传感系统就要知道它是否跌倒或没有跌倒。
虽然视觉是一个机器人最重要的遥感功能,但由于视觉系统规模和实力的限制,建立一个强大的视觉系统在机器人自己的身体上是困难的。
如果我们想进一步要求动态反应和智能推理经验的基础上基于视觉的机器人行为研究,那么机器人机构要轻巧足以够迅速作出迅速反应,并有许多自由度为了显示驱动各种智能行为。
至于有腿机器人,只有一个以视觉为基础的小小的研究。
面临的困难是在基于视觉有腿机器人实验研究上由硬件的显示所限制。
在有限的硬件基础上是很难继续发展先进的视觉软件。
为了解决这些问题和推进基于视觉的行为研究,可以通过建立远程脑的办法。
身体和大脑相连的无线链路使用无线照相机和远程控制机器人,因为机体并不需要电脑板,所以它变得更加容易建立一个有许多自由度驱动的轻盈机身。
在这项研究中,我们制定了一个使用远程脑机器人的环境并且使它执行平衡的视觉和起立的手扶两足机器人,通过胳膊和腿的合作,该系统和实验结果说明如下。
图 1 远程脑系统的硬件配置图 2 两组机器人的身体结构2 远程脑系统远程控制机器人不使用自己大脑内的机构。
它留大脑在控制系统中并且与它用无线电联系。
这使我们能够建立一个自由的身体和沉重大脑的机器人。
身体和大脑的定义软件和硬件之间连接的接口。
身体是为了适应每个研究项目和任务而设计的。
这使我们提前进行研究各种真实机器人系统。
一个主要利用远程脑机器人是基于超级并行计算机上有一个大型及重型颅脑。
虽然硬件技术已经先进了并拥有生产功能强大的紧凑型视觉系统的规模,但是硬件仍然很大。
摄像头和视觉处理器的无线连接已经成为一种研究工具。
远程脑的做法使我们在基于视觉机器人技术各种实验问题的研究上取得进展。
另一个远程脑的做法的优点是机器人机体轻巧。
这开辟了与有腿移动机器人合作的可能性。
至于动物,一个机器人有 4 个可以行走的四肢。
我们的重点是基于视觉的适应行为的4肢机器人、机械动物,在外地进行试验还没有太多的研究。
大脑是提出的在母体环境中通过接代遗传。
大脑和母体可以分享新设计的机器人。
一个开发者利用环境可以集中精力在大脑的功能设计上。
对于机器人的大脑被提出在一个母体的环境,它可以直接受益于母体的“演变”,也就是说当母体升级到一个更强大的计算机时该软件容易获得权利。
图1显示了远程脑系统由大脑基地,机器人的身体和大脑体界面组成。
在远程脑办法中大脑和身体接触面之间的设计和性能是关键。
我们目前的执行情况采取了完全远程脑的办法,这意味着该机体上没有电脑芯片。
目前系统由视觉子系统,非视觉传感器子系统和运动控制子系统组成。
一个障碍物可以从机器人机体的摄像机上接收视频信号。
每个视觉子系统由平行放置的 8 个显示板组成。
一个机体仅有一个运动指令信号和传输传感器的信号的接收器。
该传感器信息从视频发射机传输。
传输其他传感器的信息是可能的,如触摸和伺服错误通过视频传输的信号整合成一个视频图像。
该驱动器是包括一个模拟伺服电路和接收安置器的连接模块。
离子参考价值来自于动作接收器。
该动作控制子系统可以通过13个波段处理多达104个驱动器和每20兆秒发送参考价值的所有驱动器。
3两个手和足的机器人图2显示了两个手和足的机器人的结构。
机器人的主要电力组成部分是连接着伺服驱动器控、制信号接收器定位传感器,发射机,电池驱动器,传感器和一个摄像头,视频发射机,没有电脑板。
伺服驱动器包括一个齿轮传动电动机和伺服电路模拟的方块。
控制信号给每个伺服模块的位置参考。
扭矩伺服模块可覆盖2Kgcm -1 4Kgcm 的速度约 0 .2sec/60deg。
控制信号传输无线电路编码的8个参考值。
该机器人在图 2 中有两个接收器模块在芯片上以控制16个驱动器。
图3说明了方向传感器使用了一套垂直开关。
垂直开关是水银开关。
当水银开关(a)是倾斜时,下拉关闭的汞之间接触的两个电极。
方向传感器安装两个汞开关,如图显示在(b)项。
该交换机提供了两个比特信号用来检测 4 个方向的传感器如图所示在(c)项。
该机器人具有在其胸部的传感器并且它可以区分四个方向:面朝上,面朝下,站立和颠倒。
该机体的结构设计和模拟在母亲环境下。
该机体的运动学模型是被描述面向一个口齿不清的对象,这使我们能够描述几何实体模型和窗口界面设计的行为。
图 3 传感器的两个水银定位开关图4显示远程脑机器人的一些环境项目分类。
这些分类为扩大发展各种机器人提供了丰富的平台。
4基于视觉的平衡该机器人可以用两条腿站起来。
因为它可以改变机体的重心,通过控制踝关节的角度,它可以进行静态的两足行走。
如果地面不平整或不稳定,在静态步行期间机器人必需控制她的身体平衡。
为了视觉平衡和保持移动平稳,它要有高速的视觉系统。
我们已经用相关的芯片制定了一项跟踪视觉板。
这个视觉板由带着特别 LSI 芯片(电位:运动估计处理器)扩张转换器组成 ,与执行本地图像块匹配。
图 4 层次分类图5 步行步态该输入处理器是作为参考程序块和一个图像搜索窗口形象。
该大小的参考程序块可达16*16像素。
该大小的搜索窗口取决于参考块的大小通常高达32*32 像素,以便它能够包括 16 * 16且匹配。
该处理器计算价值 256 萨赫勒(总和绝对差)之间的参考块和 256 块在搜索窗口,还找到最佳匹配块,这就是其中的最低萨赫勒价值。
当目标平移时块匹配是非常有力的。
然而,普通的块匹配方法当它旋转时无法跟踪目标。
为了克服这一困难,我们开发了一种新方法,跟随真正旋转目标的候选模板。
旋转模板法首先生成所有目标图像旋转,并且几个足够的候选参考模板被选择并跟踪前面图的场景相匹配。
图 5 展示了一个平衡实验。
在这个实验中机器人站在倾斜的木板上。
机器人视觉跟踪着前面的场景。
它会记住一个物体垂直方向作为视觉跟踪的参照并产生了旋转图像的参考图象。
如果视觉跟踪的参考对象使用旋转图像,它可以衡量身体旋转。
为了保持身体平衡,机器人的反馈控制其身体旋转来控制中心机体的重心。
旋转视觉跟踪可以跟踪视频图像率。
图 6 双足步行该输入处理器是作为参考程序块和一个图像搜索窗口形象.该大小的参考程序块可达 16*16 像素.该大小的搜索窗口取决于参考块的大小通常高达 32*32 像素,以便它能够包括16 * 16且匹配。
该处理器计算价值 256 萨赫勒(总和绝对差)之间的参考块和256块在搜索窗口,还找到最佳匹配块,这就是其中的最低萨赫勒价值。
当目标平移时块匹配是非常有力的。
然而,普通的块匹配方法当它旋转时无法跟踪目标。
为了克服这一困难,我们开发了一种新方法,跟随真正旋转目标的候选模板。
旋转模板法首先生成所有目标图像旋转,并且几个足够的候选参考模板被选择并跟踪前面图的场景相匹配。
图5展示了一个平衡实验。
在这个实验中机器人站在倾斜的木板上。
机器人视觉跟踪着前面的场景。
它会记住一个物体垂直方向作为视觉跟踪的参照并产生了旋转图像的参考图象。
如果视觉跟踪的参考对象使用旋转图像,它可以衡量身体旋转。
为了保持身体平衡,机器人的反馈控制其身体旋转来控制中心机体的重心。
旋转视觉跟踪可以跟踪视频图像率。
图 7 双足步行实验5 双足步行如果一个双足机器人可以自由的控制机器人的重心,它可以执行双足行走。
展示在图7的机器人在脚踝的位置有以左和以右的角度,它可以在特定的方式下执行双足行走。
该一个周期的一系列运动由八个阶段组成,如图6所示。
一个步骤包括四个阶段:移动脚的重力中心,抬腿,向前移动,换腿。
由于身体被描述用实体模型,根据重心参数机器人可以产生一个机构配置移动重力中心。
这一运动后,机器人可以抬起另一条腿并且向前走。
在抬腿过程中机器人必须操纵机构配置,以保持支持脚上的重心。
依赖于重心的高度作为平衡的稳定性,机器人选择合适的膝盖角度.图7显示了一系列双足机器人行走的实验。
6 滚动和站立图8显示了一系列滚动,坐着和站起来的动作。
这个动作要求胳膊和腿之间的协调。
由于步行机器人有一个电池,该机器人可使用电池的重量做翻转动作。
当机器人抬起左腿,向后移动左臂且右臂向前,它可以得到机体周围的旋转力矩。
如果身体开始转动,右腿向后移动并且左脚依赖脸部返回原来位置。
翻滚运动身体的变化方向从仰视到俯视。
它可通过方向传感器核查。
得到正面朝下的方向后,向下移动机器人的手臂以坐在两个脚上。
这个动作引起了双手和地面之间的滑动。
如果手臂的长度不够达到在脚上的身体重心,这个坐的运动要求有手臂来推动运动。
站立运动是被控制的,以保持平衡。
图 8 一系列滚动和站立运动7 通过集成传感器网络转型的综合为了使上述描述的基本动作成为一体,我们通过一种方法来描述一种被认为是根据传感器状况的网络转型。
图9显示了综合了基本动作机器人的状态转移图: 两足行走,滚动,坐着和站立。
这种一体化提供了机器人保持行走甚至跌倒时的能力。
普通的双足行走是由两步组成,连续的左腿在前和右腿在前。
这个姿势依赖于背部和“脸部”和“站立”是一样的。
也就是说,机器人的机体形状是相同的,但方向是不同的。
该机器人可以探测机器人是否依赖于背部或面部使用方向传感器。
当机器人发觉跌倒时,它改变了依赖于背部或腹部通过移动不确定姿势的状况。
如果机器人依赖于背部起来,一系列的动作将被计划执行:翻转、坐下和站立动作。
如果这种情况是依赖于脸部,它不执行翻转而是移动手臂执行坐的动作。
8结束语本文提出了一个两手臂的可以执行静态双足行走,翻转和站立动作的机器人。
建立这种行为的关键是远程脑方法。
正如实验表明,无线技术允许机体自由移动。
这似乎也改变我们概念化机器人的一种方式。
在我们的实验室已经发展一种新的研究环境,更适合于机器人和真实世界的人工智能。
这里提出的机器人是一个有腿的机器人。