工业机器人外文翻译
工业机器人专业英语Chapter 6 Manipulator of Industrial Robot

VOCABULARY
anchor /'æŋkə/ n. 锚;抛锚停泊;adj. 末棒的;vt. 抛锚;使固定;vi. 抛锚 combination /kɒmbɪ'neɪʃ(ə)n/ n. 结合;组合;联合;[化学] 化合 rotation /rə(ʊ)'teɪʃ(ə)n/ n. 旋转;循环,轮流 extension /ɪk'stenʃ(ə)n; ek-/ n. 延长;延期;扩大;伸展;电话分机 twisting /'twɪstɪŋ/ n. 快速扭转,缠绕v. 使弯曲;adj. 曲折的,缠绕的 linear /'lɪnɪə/ adj. 线的,线型的;直线的,线状的;长度的 ceiling /'siːlɪŋ/ n. 天花板;上限 execute /'eksɪkjuːt/ vt. 实行;执行;处死 grasp /grɑːsp/ v. 抓牢,握紧;n. 抓,握;理解,把握;权力,控制 shoulder /'ʃəʊldə/ n. 肩,肩膀;肩部vi.用肩顶 vt. 肩负,承担
几乎所有的工业机器人都有机械手臂来执行动作,比如抓取和移动产品。手臂由 几个轴组成,如底座、肩膀、肘部等。通常而言,手臂与机器人的基座相连,提供 工作空间的主截面包络面。目前,六关节轴式工业机器人的需求量很大,它对计算 机控制系统的需求也更为复杂。
TRANSLATION
腕部 机器人本体的腕部是用来模仿人类的手腕的,可以执行大范围的运动。腕部连
TEXT
Arm Almost all the industrial robots have arms to perform the movements, like grasping and moving the product. The arm is consisted of several axes, such as base, shoulder, elbow, etc. Generally speaking the arm is connected to the base of robot ,and it can provide the working envelope per area of floor space. Currently, the demand for six jointed axis industrial robot is vert large, and it needs some rather sophisticated computer control.
工业机械手中英文对照外文翻译文献

中英文对照外文翻译文献(文档含英文原文和中文翻译)原文:ManipulatorRobot developed in recent decades as high-tech automated production equipment. Industrial rob ot is an important branch of industrial robots. It features can be programmed to perform tasks in a variety of expectations, in both structure and performance advantages of their own people and mac hines, in particular, reflects the people's intelligence and adaptability. The accuracy of robot operat ions and a variety of environments the ability to complete the work in the field of national econom y and there are broad prospects for development. With the development of industrial automation, t here has been CNC machining center, it is in reducing labor intensity, while greatly improved labo r productivity. However, the upper and lower common in CNC machining processes material, usua lly still use manual or traditional relay-controlled semi-automatic device. The former time-consum ing and labor intensive, inefficient; the latter due to design complexity, require more relays, wiring complexity, vulnerability to body vibration interference, while the existence of poor reliability, fa ult more maintenance problems and other issues. Programmable Logic Controller PLC-controlled robot control system for materials up and down movement is simple, circuit design is reasonable, with a strong anti-jamming capability, ensuring the system's reliability, reduced maintenance rate, and improve work efficiency. Robot technology related to mechanics, mechanics, electrical hydrau lic technology, automatic control technology, sensor technology and computer technology and oth er fields of science, is a cross-disciplinary integrated technology.First, an overview of industrial manipulatorRobot is a kind of positioning control can be automated and can be re-programmed to change in multi-functional machine, which has multiple degrees of freedom can be used to carry an object in order to complete the work in different environments. Low wages in China, plastic products ind ustry, although still a labor-intensive, mechanical hand use has become increasingly popular. Elect ronics and automotive industries that Europe and the United States multinational companies very e arly in their factories in China, the introduction of automated production. But now the changes are those found in industrial-intensive South China, East China's coastal areas, local plastic processing plants have also emerged in mechanical watches began to become increasingly interested in, beca use they have to face a high turnover rate of workers, as well as for the workers to pay work-relate d injuries fee challenges.With the rapid development of China's industrial production, especially the reform and opening up after the rapid increase in the degree of automation to achieve the workpiece handling, steering, transmission or operation of brazing, spray gun, wrenches and other tools for processing and asse mbly operations since, which has more and more attracted our attention. Robot is to imitate the ma nual part of the action, according to a given program, track and requirements for automatic capture , handling or operation of the automatic mechanical devices.In real life, you will find this a problem. In the machine shop, the processing of parts loading ti me is not annoying, and labor productivity is not high, the cost of production major, and sometime s man-made incidents will occur, resulting in processing were injured. Think about what could rep lace it with the processing time of a tour as long as there are a few people, and can operate 24 hour s saturated human right? The answer is yes, but the robot can come to replace it.Production of mechanical hand can increase the automation level of production and labor produ ctivity; can reduce labor intensity, ensuring product quality, to achieve safe production; particularl y in the high-temperature, high pressure, low temperature, low pressure, dust, explosive, toxic and radioactive gases such as poor environment can replace the normal working people. Here I would l ike to think of designing a robot to be used in actual production.Why would a robot designed to provide a pneumatic power: pneumatic robot refers to the comp ressed air as power source-driven robot. With pressure-driven and other energy-driven comparison have the following advantages: 1. Air inexhaustible, used later discharged into the atmosphere, do es not require recycling and disposal, do not pollute the environment. (Concept of environmental p rotection) 2. Air stick is small, the pipeline pressure loss is small (typically less than asphalt gas pa th pressure drop of one-thousandth), to facilitate long-distance transport. 3. Compressed air of the working pressure is low (usually 4 to 8 kg / per square centimeter), and therefore moving the mate rial components and manufacturing accuracy requirements can be lowered. 4. With the hydraulic t ransmission, compared to its faster action and reaction, which is one of the advantages pneumatic outstanding. 5. The air cleaner media, it will not degenerate, not easy to plug the pipeline. But there are also places where it fly in the ointment: 1. As the compressibility of air, resulting in poor aer odynamic stability of the work, resulting in the implementing agencies as the precision of the velo city and not easily controlled. 2. As the use of low atmospheric pressure, the output power can not be too large; in order to increase the output power is bound to the structure of the entire pneumatic system size increased.With pneumatic drive and compare with other energy sources drive has the following advantage s:Air inexhaustible, used later discharged into the atmosphere, without recycling and disposal, do not pollute the environment. Accidental or a small amount of leakage would not be a serious impa ct on production. Viscosity of air is small, the pipeline pressure loss also is very small, easy long-d istance transport.The lower working pressure of compressed air, pneumatic components and therefore the materi al and manufacturing accuracy requirements can be lowered. In general, reciprocating thrust in 1 t o 2 tons pneumatic economy is better.Compared with the hydraulic transmission, and its faster action and reaction, which is one of th e outstanding merits of pneumatic.Clean air medium, it will not degenerate, not easy to plug the pipeline. It can be safely used in fl ammable, explosive and the dust big occasions. Also easy to realize automatic overload protection. Second, the composition, mechanical handRobot in the form of a variety of forms, some relatively simple, some more complicated, but the basic form is the same as the composition of the , Usually by the implementing agencies, transmis sion systems, control systems and auxiliary devices composed.1.Implementing agenciesManipulator executing agency by the hands, wrists, arms, pillars. Hands are crawling institution s, is used to clamp and release the workpiece, and similar to human fingers, to complete the staffin g of similar actions. Wrist and fingers and the arm connecting the components can be up and down , left, and rotary movement. A simple mechanical hand can not wrist. Pillars used to support the ar m can also be made mobile as needed.2. TransmissionThe actuator to be achieved by the transmission system. Sub-transmission system commonly us ed manipulator mechanical transmission, hydraulic transmission, pneumatic and electric power tra nsmission and other drive several forms.3. Control SystemManipulator control system's main role is to control the robot according to certain procedures, direction, position, speed of action, a simple mechanical hand is generally not set up a dedicated co ntrol system, using only trip switches, relays, control valves and circuits can be achieved dynamic drive system control, so that implementing agencies according to the requirements of action. Actio n will have to use complex programmable robot controller, the micro-computer control. Three, mechanical hand classification and characteristicsRobots are generally divided into three categories: the first is the general machinery does not re quire manual hand. It is an independent not affiliated with a particular host device. It can be progra mmed according to the needs of the task to complete the operation of the provisions. It is character ized with ordinary mechanical performance, also has general machinery, memory, intelligence tern ary machinery. The second category is the need to manually do it, called the operation of aircraft. I t originated in the atom, military industry, first through the operation of machines to complete a pa rticular job, and later developed to operate using radio signals to carry out detecting machines suc h as the Moon. Used in industrial manipulator also fall into this category. The third category is ded icated manipulator, the main subsidiary of the automatic machines or automatic lines, to solve the machine up and down the workpiece material and delivery. This mechanical hand in foreign count ries known as the "Mechanical Hand", which is the host of services, from the host-driven; excepti on of a few outside the working procedures are generally fixed, and therefore special.Main features:First, mechanical hand (the upper and lower material robot, assembly robot, handling robot, stac king robot, help robot, vacuum handling machines, vacuum suction crane, labor-saving spreader, p neumatic balancer, etc.).Second, cantilever cranes (cantilever crane, electric chain hoist crane, air balance the hanging, e tc.)Third, rail-type transport system (hanging rail, light rail, single girder cranes, double-beam cran e)Four, industrial machinery, application of handManipulator in the mechanization and automation of the production process developed a new ty pe of device. In recent years, as electronic technology, especially computer extensive use of robot development and production of high-tech fields has become a rapidly developed a new technology , which further promoted the development of robot, allowing robot to better achieved with the com bination of mechanization and automation.Although the robot is not as flexible as staff, but it has to the continuous duplication of work an d labor, I do not know fatigue, not afraid of danger, the power snatch weight characteristics when compared with manual large, therefore, mechanical hand has been of great importance to many sectors, and increasingly has been applied widely, for example:(1) Machining the workpiece loading and unloading, especially in the automatic lathe, combinat ion machine tool use is more common.(2) In the assembly operations are widely used in the electronics industry, it can be used to asse mble printed circuit boards, in the machinery industry It can be used to assemble parts and compo nents.(3) The working conditions may be poor, monotonous, repetitive easy to sub-fatigue working e nvironment to replace human labor.(4) May be in dangerous situations, such as military goods handling, dangerous goods and haza rdous materials removal and so on..(5) Universe and ocean development.(6), military engineering and biomedical research and testing.Help mechanical hands: also known as the balancer, balance suspended, labor-saving spreader, ma nual Transfer machine is a kind of weightlessness of manual load system, a novel, time-saving tec hnology for material handling operations booster equipment, belonging to kinds of non-standard d esign of series products. Customer application needs, creating customized cases. Manual operation of a simulation of the automatic machinery, it can be a fixed program draws ﹑ handling objects o r perform household tools to accomplish certain specific actions. Application of robot can replace t he people engaged in monotonous ﹑ repetitive or heavy manual labor, the mechanization and aut omation of production, instead of people in hazardous environments manual operation, improving working conditions and ensure personal safety. The late 20th century, 40, the United States atomic energy experiments, the first use of radioactive material handling robot, human robot in a safe roo m to manipulate various operations and experimentation. 50 years later, manipulator and gradually extended to industrial production sector, for the temperatures, polluted areas, and loading and unl oading to take place the work piece material, but also as an auxiliary device in automatic machine tools, machine tools, automatic production lines and processing center applications, the completio n of the upper and lower material, or From the library take place knife knife and so on according t o fixed procedures for the replacement operation. Robot body mainly by the hand and sports instit utions. Agencies with the use of hands and operation of objects of different occasions, often there are clamping ﹑ support and adsorption type of care. Movement organs are generally hydraulic pn eumatic ﹑﹑ electrical device drivers. Manipulator can be achieved independently retractable ﹑rotation and lifting movements, generally 2 to 3 degrees of freedom. Robots are widely used in me tallurgical industry, machinery manufacture, light industry and atomic energy sectors.Can mimic some of the staff and arm motor function, a fixd procedure for the capture, handlingobjects or operating tools, automatic operation device. It can replace human labor in order to achie ve the production of heavy mechanization and automation that can operate in hazardous environm ents to protect the personal safety, which is widely used in machinery manufacturing, metallurgy, e lectronics, light industry and nuclear power sectors. Mechanical hand tools or other equipment co mmonly used for additional devices, such as the automatic machines or automatic production line handling and transmission of the workpiece, the replacement of cutting tools in machining centers, etc. generally do not have a separate control device. Some operating devices require direct manip ulation by humans; such as the atomic energy sector performs household hazardous materials used in the master-slave manipulator is also often referred to as mechanical hand.Manipulator mainly by hand and sports institutions. Task of hand is holding the workpiece (or t ool) components, according to grasping objects by shape, size, weight, material and operational re quirements of a variety of structural forms, such as clamp type, type and adsorption-based care suc h as holding. Sports organizations, so that the completion of a variety of hand rotation (swing), mo bile or compound movements to achieve the required action, to change the location of objects by g rasping and posture.Robot is the automated production of a kind used in the process of crawling and moving piece f eatures automatic device, which is mechanized and automated production process developed a ne w type of device. In recent years, as electronic technology, especially computer extensive use of ro bot development and production of high-tech fields has become a rapidly developed a new technol ogy, which further promoted the development of robot, allowing robot to better achieved with the combination of mechanization and automation. Robot can replace humans completed the risk of d uplication of boring work, to reduce human labor intensity and improve labor productivity. Manip ulator has been applied more and more widely, in the machinery industry, it can be used for parts a ssembly, work piece handling, loading and unloading, particularly in the automation of CNC mach ine tools, modular machine tools more commonly used. At present, the robot has developed into a FMS flexible manufacturing systems and flexible manufacturing cell in an important component o f the FMC. The machine tool equipment and machinery in hand together constitute a flexible man ufacturing system or a flexible manufacturing cell, it was adapted to small and medium volume pr oduction, you can save a huge amount of the work piece conveyor device, compact, and adaptable. When the work piece changes, flexible production system is very easy to change will help enterpr ises to continuously update the marketable variety, improve product quality, and better adapt to ma rket competition. At present, China's industrial robot technology and its engineering application le vel and comparable to foreign countries there is a certain distance, application and industrializatio n of the size of the low level of robot research and development of a direct impact on raising the level of automation in China, from the economy, technical considerations are very necessary. Theref ore, the study of mechanical hand design is very meaningful.译文:机械手机械手是近几十年发展起来的一种高科技自动化生产设备。
Industrial Robots工业机器人

Industrial Robots工业机器人工业机器人近年来,随着科技的飞速发展,特别是人工智能和自动化技术的突破,工业机器人的应用范围越来越广泛。
工业机器人是指可以完成各种工业任务的自动化机械设备,它们依靠计算机控制系统进行操作,具有高度的精确性和效率。
本文将探讨工业机器人在生产制造、医疗保健和未来发展方向等方面的重要性和应用。
工业机器人在生产制造中发挥着重要作用。
相比传统的人工操作和生产流程,工业机器人不仅能够提高生产效率,还能够提高产品质量和准确度。
例如,在汽车制造中,工业机器人可以完成各种复杂的焊接、喷漆和组装任务,大大减少了人为错误和事故的风险。
此外,工业机器人的使用还可以实现生产线的自动化,降低了生产成本,并且能够适应不同的生产需求,提高了企业的竞争力。
在医疗保健领域,工业机器人也扮演着重要的角色。
随着人口老龄化趋势的加剧,需要提供更多的医疗服务和护理。
工业机器人可以被用于手术和病房护理等领域,减少医护人员的工作负担,并提高手术的成功率和治疗效果。
例如,手术机器人可以通过精确的操作和视觉技术,完成微创手术,减少患者的痛苦和术后恢复时间。
此外,工业机器人还可以提供定制的护理服务,如帮助老人或残疾人完成日常生活活动,提高他们的生活质量。
工业机器人的发展也面临着许多挑战和机遇。
首先,工业机器人需要进一步提升智能化水平,以适应复杂多变的生产环境。
目前,许多工业机器人仍然依赖于预设的程序和指令进行操作,缺乏灵活性和适应性。
因此,研究人员正在致力于开发更先进的机器视觉和感知技术,使机器人能够更好地理解和应对环境变化。
其次,工业机器人还需要改进其安全性能,以防止由于意外损伤和事故而对人类和环境造成危害。
这需要开发更可靠的传感器和控制系统,以及完善的安全标准和规范。
总之,随着科技的不断进步和创新,工业机器人在生产制造和医疗保健领域的重要性日益凸显。
它们以高度精确性和效率帮助企业提高生产效率,促进医疗服务和护理的发展,同时也为工业机器人的未来发展指明了方向。
机器人外文文献翻译、中英文翻译
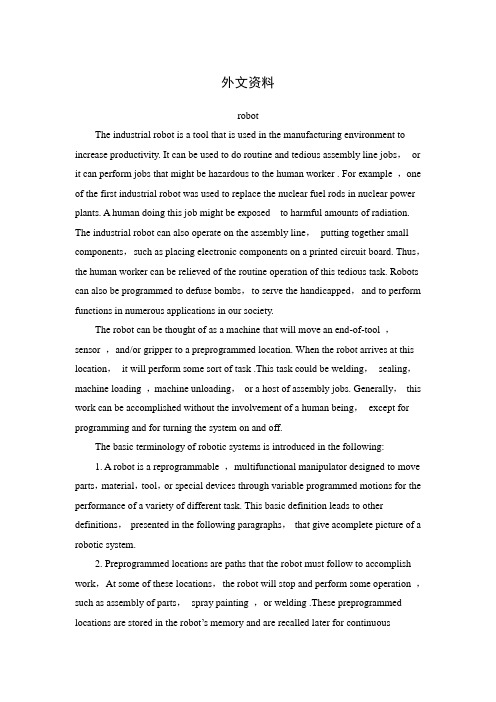
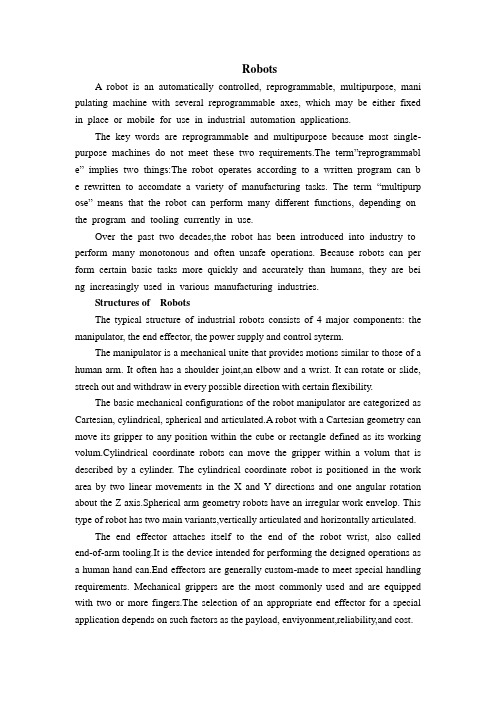
外文资料robotThe industrial robot is a tool that is used in the manufacturing environment to increase productivity. It can be used to do routine and tedious assembly line jobs,or it can perform jobs that might be hazardous to the human worker . For example ,one of the first industrial robot was used to replace the nuclear fuel rods in nuclear power plants. A human doing this job might be exposed to harmful amounts of radiation. The industrial robot can also operate on the assembly line,putting together small components,such as placing electronic components on a printed circuit board. Thus,the human worker can be relieved of the routine operation of this tedious task. Robots can also be programmed to defuse bombs,to serve the handicapped,and to perform functions in numerous applications in our society.The robot can be thought of as a machine that will move an end-of-tool ,sensor ,and/or gripper to a preprogrammed location. When the robot arrives at this location,it will perform some sort of task .This task could be welding,sealing,machine loading ,machine unloading,or a host of assembly jobs. Generally,this work can be accomplished without the involvement of a human being,except for programming and for turning the system on and off.The basic terminology of robotic systems is introduced in the following:1. A robot is a reprogrammable ,multifunctional manipulator designed to move parts,material,tool,or special devices through variable programmed motions for the performance of a variety of different task. This basic definition leads to other definitions,presented in the following paragraphs,that give acomplete picture of a robotic system.2. Preprogrammed locations are paths that the robot must follow to accomplish work,At some of these locations,the robot will stop and perform some operation ,such as assembly of parts,spray painting ,or welding .These preprogrammed locations are stored in the robot’s memory and are recalled later for continuousoperation.Furthermore,these preprogrammed locations,as well as other program data,can be changed later as the work requirements change.Thus,with regard to this programming feature,an industrial robot is very much like a computer ,where data can be stoned and later recalled and edited.3. The manipulator is the arm of the robot .It allows the robot to bend,reach,and twist.This movement is provided by the manipulator’s axes,also called the degrees of freedom of the robot .A robot can have from 3 to 16 axes.The term degrees of freedom will always relate to the number of axes found on a robot.4. The tooling and frippers are not part the robotic system itself;rather,they are attachments that fit on the end of the robot’s arm. These attachments connected to the end of the robot’s arm allow the robot to lift parts,spot-weld ,paint,arc-weld,drill,deburr,and do a variety of tasks,depending on what is required of the robot.5. The robotic system can control the work cell of the operating robot.The work cell of the robot is the total environment in which the robot must perform itstask.Included within this cell may be the controller ,the robot manipulator ,a work table ,safety features,or a conveyor.All the equipment that is required in order for the robot to do its job is included in the work cell .In addition,signals from outside devices can communicate with the robot to tell the robot when it should parts,pick up parts,or unload parts to a conveyor.The robotic system has three basic components: the manipulator,the controller,and the power source.A.ManipulatorThe manipulator ,which does the physical work of the robotic system,consists of two sections:the mechanical section and the attached appendage.The manipulator also has a base to which the appendages are attached.Fig.1 illustrates the connectionof the base and the appendage of a robot.图1.Basic components of a robot’s manipulatorThe base of the manipulator is usually fixed to the floor of the work area. Sometimes,though,the base may be movable. In this case,the base is attached to either a rail or a track,allowing the manipulator to be moved from one location to anther.As mentioned previously ,the appendage extends from the base of the robot. The appendage is the arm of the robot. It can be either a straight ,movable arm or a jointed arm. The jointed arm is also known as an articulated arm.The appendages of the robot manipulator give the manipulator its various axes of motion. These axes are attached to a fixed base ,which,in turn,is secured to a mounting. This mounting ensures that the manipulator will in one location.At the end of the arm ,a wrist(see Fig 2)is connected. The wrist is made up of additional axes and a wrist flange. The wrist flange allows the robot user to connect different tooling to the wrist for different jobs.图2.Elements of a work cell from the topThe manipulator’s axes allow it to perform work within a certain area. The area is called the work cell of the robot ,and its size corresponds to the size of the manipulator.(Fid2)illustrates the work cell of a typical assembly ro bot.As the robot’s physical size increases,the size of the work cell must also increase.The movement of the manipulator is controlled by actuator,or drive systems.The actuator,or drive systems,allows the various axes to move within the work cell. The drive system can use electric,hydraulic,or pneumatic power.The energy developed by the drive system is converted to mechanical power by various mechanical power systems.The drive systems are coupled through mechanical linkages.These linkages,in turn,drive the different axes of the robot.The mechanical linkages may be composed of chain,gear,and ball screws.B.ControllerThe controller in the robotic system is the heart of the operation .The controller stores preprogrammed information for later recall,controls peripheral devices,and communicates with computers within the plant for constant updates in production.The controller is used to control the robot manipulator’s movements as well as to control peripheral components within the work cell. The user can program the movements of the manipulator into the controller through the use of a hard-held teach pendant.This information is stored in the memory of the controller for later recall.The controller stores all program data for the robotic system.It can store several differentprograms,and any of these programs can be edited.The controller is also required to communicate with peripheral equipment within the work cell. For example,the controller has an input line that identifies when a machining operation is completed.When the machine cycle is completed,the input line turn on telling the controller to position the manipulator so that it can pick up the finished part.Then ,a new part is picked up by the manipulator and placed into the machine.Next,the controller signals the machine to start operation.The controller can be made from mechanically operated drums that step through a sequence of events.This type of controller operates with a very simple robotic system.The controllers found on the majority of robotic systems are more complex devices and represent state-of-the-art eletronoics.That is,they are microprocessor-operated.these microprocessors are either 8-bit,16-bit,or 32-bit processors.this power allows the controller to be very flexible in its operation.The controller can send electric signals over communication lines that allow it to talk with the various axes of the manipulator. This two-way communication between the robot manipulator and the controller maintains a constant update of the end the operation of the system.The controller also controls any tooling placed on the end of the robot’s wrist.The controller also has the job of communicating with the different plant computers. The communication link establishes the robot as part a computer-assisted manufacturing (CAM)system.As the basic definition stated,the robot is a reprogrammable,multifunctional manipulator.Therefore,the controller must contain some of memory stage. The microprocessor-based systems operates in conjunction with solid-state devices.These memory devices may be magnetic bubbles,random-access memory,floppy disks,or magnetic tape.Each memory storage device stores program information fir or for editing.C.power supplyThe power supply is the unit that supplies power to the controller and the manipulator. The type of power are delivered to the robotic system. One type of power is the AC power for operation of the controller. The other type of power isused for driving the various axes of the manipulator. For example,if the robot manipulator is controlled by hydraulic or pneumatic drives,control signals are sent to these devices causing motion of the robot.For each robotic system,power is required to operate the manipulator .This power can be developed from either a hydraulic power source,a pneumatic power source,or an electric power source.There power sources are part of the total components of the robotic work cell.中文翻译机器人工业机器人是在生产环境中用以提高生产效率的工具,它能做常规乏味的装配线工作,或能做那些对于工人来说是危险的工作,例如,第一代工业机器人是用来在核电站中更换核燃料棒,如果人去做这项工作,将会遭受有害放射线的辐射。
Robots机器人 中英文翻译
RobotsA robot is an automatically controlled, reprogrammable, multipurpose, mani pulating machine with several reprogrammable axes, which may be either fixed in place or mobile for use in industrial automation applications.The key words are reprogrammable and multipurpose because most single-purpose machines do not meet these two requirements.The term”reprogrammabl e” implies two things:The robot operates according to a written program can b e rewritten to accomdate a variety of manufacturing tasks. The term “multipurp ose” means that the robot can perform many different functions, depending on the program and tooling currently in use.Over the past two decades,the robot has been introduced into industry to perform many monotonous and often unsafe operations. Because robots can per form certain basic tasks more quickly and accurately than humans, they are bei ng increasingly used in various manufacturing industries.Structures of RobotsThe typical structure of industrial robots consists of 4 major components: the manipulator, the end effector, the power supply and control syterm.The manipulator is a mechanical unite that provides motions similar to those of a human arm. It often has a shoulder joint,an elbow and a wrist. It can rotate or slide, strech out and withdraw in every possible direction with certain flexibility.The basic mechanical configurations of the robot manipulator are categorized as Cartesian, cylindrical, spherical and articulated.A robot with a Cartesian geometry can move its gripper to any position within the cube or rectangle defined as its working volum.Cylindrical coordinate robots can move the gripper within a volum that is described by a cylinder. The cylindrical coordinate robot is positioned in the work area by two linear movements in the X and Y directions and one angular rotation about the Z axis.Spherical arm geometry robots have an irregular work envelop. This type of robot has two main variants,vertically articulated and horizontally articulated.The end effector attaches itself to the end of the robot wrist, also called end-of-arm tooling.It is the device intended for performing the designed operations as a human hand can.End effectors are generally custom-made to meet special handling requirements. Mechanical grippers are the most commonly used and are equipped with two or more fingers.The selection of an appropriate end effector for a special application depends on such factors as the payload, enviyonment,reliability,and cost.The power supply is the actuator for moving the robot arm, controlling the joints and operating the end effector. The basic type of power sources include electrical,pneumatic, and hydraulic. Each source of energy and each type of motor has its own characteristics, advantages and limitations. An ac-powered motor or dc-powered motor may be used depending on the system design and applications. These motors convert electrical energy into mechanical energy to power the robot.Most new robots use electrical power supply. Pneumatic actuators have been used for high speed. Nonservo robots and are often used for powering tooling such as grippers. Hydraulic actuators have been used for heavier lift systems, typically where accuracy was not also requied.The contro system is the communications and information-processing system that gives commands for the movements of the robot. It is the brain of the robot; it sends signals to the power source to move the robot arm to a specific position and to the end effector.It is also the nerves of the robot; it is reprogrammable to send out sequences of instructions for all movements and actions to be taken by the robot.A open-loop controller is the simplest for of the control system, which controls the robot only by foolowing the predetermined step-by-step instructions.This system dose not have a self-correcting capability.A close-loop control system use feedback sensors to produce signals that reflct the current states of the controed objects. By comparing those feedback signals with the values set by the programmer, the close-loop controller can conduct the robot to move to the precise position and assume the desired attitude, and the end effector can perform with very high accuracy as the close-loop control system can minimize the discrepancy between the controlled object and the predetermined references.Classification of RobotIndustrial robots vary widely in size,shape, number of axes,degrees of freedom, and design configuration. Each factor influence the dimensions of the robot’s working envelop or the volume of space within which it can move and perform its designated task. A broader classification of robots can been described as below.Fixed-and Variable-Sequence Robots. The fixed-sequence robot (also called a pick-and place robot) is programmed for a specific sequence of operations. Its movements are form point to point, and the cycle is repeated continuously.The variable-sequence robot can be programmed for a specific sequence of operations but can be programmed to perform another sequence of operation.Playback Robot. An operator leads or walks the playback robot and its end effector through the desired path. The robot memorizes and records the path and sequence of motions and can repeat them continually without any further action or guidance by the operator.Numerically Controlled Robot. The numerically controlled robot is programmed and operated much like a numerically controlled machine. The robot is servocontrolled by digital data, and its sequence of movements can be changed with relative ease.Intelligent Robot. The intelligent robot is capable of performing some of the functions and tasks carried out by huanbeings.It is equipped with a variety of sensors with visual and tactile capabilities.Robot ApplicationsThe robot is a very special type of productin tool; as a result, the applications in which robots are used are quite broad. These applications can be grouped into three categories: material processing, material handling and assembly.In material processing, robots use tools to process the raw material. For example, the robot tools could include a drill and the robot would be able to perfor drilling operaytions on raw material.Material handling consists of the loading, unloading, and transferring of workpieces in manufacturing facilities. These operations can be performed relatively and repeatedly with robots, thereby improving quality and scrap losses.Assembly is another large application area for using robotics. An automatic assembly system can incorporate automatic testing, robot automation and mechanical handling for reducing labor costs, increasing output and eliminating manual handling concers.机器人机器人是一种自动控制的、可重复编程的、多功能的、由几个可重复编程的坐标系来操纵机器的装置,它可以被固定在某地,还可以是移动的以在工业自动化工厂中使用。
工业机器人外文翻译教学提纲

附录外文文献原文Industrial RobotsDefinition“A robot is a reprogrammable,multifunctional machine designed to manipulate materials,parts,tools,or specialized devices,through variable programmed motions for the performance of a variety of tasks.”--Robotics Industries Association “A robot is an automatic device that performs functions normally ascribrd to humans or a machine in orm of a human.”--Websters Dictionary The industrial robot is used in the manufacturing environment to increase productivity . It can be used to do routine and tedious assembly line jobs , or it can perform jobs that might be hazardous to do routine and tedious assembly line jobs , or it can perform jobs that might be hazardous to the human worker . For example , one of the first industrial robots was used to replace the nuclear fuel rods in nuclear power plants . A human doing this job might be exposed to harmful amounts of radiation . The industrial robot can also operate on the assembly line , putting together small components , such as placing electronic components on a printed circuit board . Thus , the human worker can be relieved of the routine operation of this tedious task . Robots can also be programmed to defuse bombs , to serve the handicapped , and to perform functions in numerous applications in our society .The robot can be thought of as a machine that will move an end-of-arm tool , sensor , and gripper to a preprogrammed location . When the robot arrives at this location , it will perform some sort of task . This task could be welding , sealing , machine loading , machine unloading , or a host of assembly jobs . Generally , this work can be accomplished without the involvement of a human being , except for programming and for turning the system on and off .The basic terminology of robotic systems is introduced in the following :1. A robot is a reprogrammable , multifunctional manipulator designed to move parts , materials , tools , or special devices through variable programmed motions for the performance of a variety of different task . This basic definition leads to other definitions , presented in the following paragraphs , that give a complete picture of a robotic system .2. Preprogrammed locations are paths that the robot must follow to accomplish work . At some of these locations , the robot will stop and perform some operation , such as assembly of parts , spray painting , or welding . These preprogrammed locations are stored in the robot’s mem ory and are recalled later for continuous operation . Furthermore , these preprogrammed locations , as well as other program data , can be changed later as the work requirements change . Thus , with regard to this programming feature , an industrial robot is very much like a computer , where data can be stored and later recalled and edited .3. The manipulator is the arm of the robot . It allows the robot to bend , reach , and twist . This movement is provided by the manipulator’s axes , also called the degrees of freedom of the robot . A robot can have from 3 to 16 axes . The term degrees of freedom of freedom will always relate to the number of axes found on a robot .4. The tooling and grippers are not part of the robotic system itself ; rather , they are attachments that fit on the end of the robot’s arm . These attachments connected to the end of the robot’s arm allow the robot to lift parts , spot-weld , paint , arc-weld , drill , deburr , and do a variety of tasks , depending on what is required of the robot .5. The robotic system can also control the work cell of the operating robot . the work cell of the robot is the total environment in which the robot must perform its task . Included within this cell may be the controller , the robot manipulator , a work table , safety features , or a conveyor . All the equipment that is required in order for the robot to do its job is included in the work cell . In addition , signals from outside devices can communicate with the robot in order to tell the robot when it should assemble parts , pick up parts , or unload parts to a conveyor .The robotic system has three basic components : the manipulator , the controller ,and the power source .A . ManipulatorThe manipulator , which does the physical work of the robotic system , consists of two sections : the mechanical section and the attached appendage . The manipulator also has a base to which the appendages are attached . Fig.1 illustrates the connection of the base and the appendage of a robot .The base of the manipulator is usually fixed to the floor of the work area . Sometimes , though , the base may be movable . In this case , the base is attached to either a rail or a track , allowing the manipulator to be moved from one location to another .As mentioned previously , the appendage extends from the base of the robot . The appendage is the arm of the robot . It can be either a straight , movable arm or a jointed arm . the jointed arm is also known as an articulated arm .The appendages of the robot manipulator give the manipulator its various axes of motion . These axes are attached to a fixed base , which , in turn , is secured to a mounting . This mounting ensures that the manipulator will remain in one location。
工业机器人发展中英文对照外文翻译文献
中英文资料外文翻译文献The development of industrial robotsIndustrial robot is a robot, it consists of a CaoZuoJi. Controller. Servo drive system and detection sensor device composition, it is a kind of humanoid operating automatic control, can repeat programming, can finish all kinds of assignments in three difficulties in authorship space the electromechanical integration automation production equipment, especially suitable for many varieties, become batch flexible production. It to stabilize and improve the product quality, raise efficiency in production, improve working conditions of the rapid renewal plays an extremely important role.Widely used industrial robots can gradually improve working conditions, stronger and controllable production capacity, speed up product updating and upgrading. Improve production efficiency and guarantee the quality of its products, eliminate dull work, save labor, provide a safe working environment, reduces the labor intensity, and reduce labor risk, improve themachine tool, reduce the workload and reduce process production time and inventory, enhance the competitiveness of enterprises.As technology advances, the development of industrial robot, the process can be divided into three generations -- generation, for demonstration reproduce, and it mainly consists of robot hand controller and demonstration teaching machines composed, can press advance box to record information guide action, the current industry repeated reappearance application of execution most. The second to feel robot, such as powerful sleep touch and vision, it has for some outside information feedback adjustment ability, currently has entered the application stage. Third generation of intelligent robot it has sense and understanding ability, in the external environment for the working environment changed circumstances, can also successfully complete the task, it is still in the experimental research phase.The United States is the birthplace of the robot, as early as in 1961, America's ConsolidedControlCorp and AMF companies developed the first practical demonstration emersion robot.After 40 years of development, the United States in the world of robotics has been in the lead position. Still Its technology comprehensive, advanced, adaptability is strong.Japan imported from America in 1967, the first robot in 1976 later, with the rapid development of the microelectronics and the market demand has increased dramatically, Japan was labor significant deficiencies in enterprise, industrial robots by "savior"'s welcome, make its Japanese industrial robots get fast development, the number of now whether robots or robot densities are top of the world, known as the "robot kingdom," said. The robot introduced from Germany time than Britain and Sweden about late 1956, but the Labour shortages caused by war, national technical level is higher social environment, but for the development and application of industrial robot provides favorable conditions. In addition, in Germany, for some dangerous prescribed, poisonous or harmful jobs, robot instead of ordinary people to the labor. This is the use of robots exploit a wide range of markets, and promote the development of the industrial robot technology. At present, the German industrial robots total of the world, which only behind to Japan.The French government has been more important robot technology, and through a series of research program, support established a complete science and technology system, make the development of the French robot smoothly. In government organization project, pay special attention to the robot research based technique, the focus is on the application research on in robot. And by industry support the development application and development of work, both supplement each other, make robots in France enterprises develop rapidly and popularize and make France in the international industrial machine with indispensable if position.British jamie since the late 1970s, promote and implement a department measures listed support the development of policies and make robots British industrial robots than today's robot powers started to early, and once in Japan has made the early brilliance. However, at this time the government for industrial robots implemented the constraining errors. This mistake in Britain dust, the robot industry in Western Europe was almost in the bottom of it. In recent years, Italy, Sweden, Spain, Finland, Denmark and other countries because of its owndomestic robots market in great demand, development at a very fast pace. At present, the international on industrial robot company mainly divided into Japanese and European series. In AnChuan of Japanese are mainly the ethical products, the oTC, panasonic, FANLUC, not two more, etc. The products of the company kawasaki The main Asiatic KUKA, German CLOOS, Sweden's ABB, Italy CO work pelatiah U and Austria GM company.Industrial robot in China started in early 1970s, after 30 years development, roughly experienced three stages: in the 1970s and 1980s budding transplanter and the application of the 1990s initialization period. With the 20th century 70's world technology rapid development, the application of industrial robots in world created a climax, in this context, our country in 1972 start developing their industrial robots. Enter after the 1980s, with the further reform and opening, in high technology waves pound, our research and development of robot technology from the government's attention and support, "during the seventh state funds, thanked the parts were set robot and research, completed demonstration emersion type industrial robot complete technology development, developed spray paint, welding, arc welding and handling robot. , thenational high technology research and development program begin to carry out, after several years research and made a large number of scientific research. Successfully developed a batch of special robot.From 9O 2O century since the early, China's national economy achieve two fundamental period of transformation into a a new round of economic restructuring and technological progress, China's industrial robots upsurge in practice and have made strides, and have developed spot welding, welding, assembling, paint, cutting, handling, palletizing etc various USES of industrial robot, and implement a batch of robot application engineering, formed a batch of industrial robots for our country industrialization base, the industrial robot soar laid a foundation. But compared with the developed countries, China also has the very big disparity of industrial robots.Along with the development of industrial robot depth and the breadth and raise the level of robot, industrial robots are has been applied in many fields. From the traditional automobile manufacturing sector to the manufacturing extensions. Such as mining robots, building robots and hydropower system used formaintenance robots, etc. In defense of military, medicine and health, food processing and life service areas such as the application of industrial robots will be more and more. The manufacturing of automobiles is a technology and capital intensive industry, is also the most widely used of industrial robots, accounting for almost to the industry for more than half of the industrial robots. In China, the industrial robot first is also used in automobile and engineering machinery industries. In car production of industrial robot is a major in the equipment, the brake parts and whole production of arc welding, spot welding, painting, handling, glue, stamping process used in large amounts. Our country is forecast to rise period, entered the automobile ownership in the next few years, car will still growing at around 15 percent annually. So the next few years the industrial robot demand will show high growth trend, about 50% in growth, industrial robots in our automobile industry application will get a rapid development.Industrial robot in addition to the wide application of in the automotive industry in electronic, food processing, nonmetal processing, daily consumer goods and wood furniture processing industries for industrial robots demand is growingrapidly. In Asia, 2005 72,600 sets, installation industrial robots, compared with 2004 grew by 40%, and application in electronic industry accounted for about 31%. In Europe, according to statistics, since 2004 and 2005 in l: tI industry robot in the food processing industry increased 17% the application of left and right sides, in the application of nonmetal processing industry increased 20%, and daily necessities in consumption industries increased by 32% in wood furniture processing industry, up 18% or so. Industrial robot in oil has a wide application in, such as sea oil drilling, oil platforms, pipeline detection, refinery, large oil tank and tank welding etc all can use robots to complete. In the next few years, sensing technology, laser technology, engineering network technology will be widely used in industrial robots work areas, these technologies can cause the industrial robot application more efficient, high quality, lower cost. It is predicted that future robots will in medical and health care, biological technology and industry, education, relief, ocean exploitation, machine maintenance, transportation and agriculture and aquatic products applied field.In China, the industrial robot market share are mostlyforeign industrial robots enterprise holds. Before the gunman in the international, domestic industrial robots enterprise facing great pressure of competition. Now China is from a "manufacturing power" to "manufacturing power forward," Chinese manufacturing industry faces and the international community, participate in the international division of labor in the great challenge of industrial automation increase immediate, government must can increase the funds for robots and policy support, will give the industry of industrial robots development into new momentum. With independent brand "devil robot" MoShi special technology company dedicated to providing solutions to the mainboard and robot, is willing with all my colleagues a build domestic industrial robot happy tomorrow! ReferencesElectronic Measurement and Intrumenttations,Cambridge University Press,1996工业机器人的发展工业机器人是机器人的一种,它由操作机.控制器.伺服驱动系统和检测传感器装置构成,是一种仿人操作自动控制,可重复编程,能在三难空间完成各种作业的机电一体化的自动化生产设备,特别适合于多品种,变批量柔性生产。
Industrial Robots工业机器人
Industrial RobotsThere are a variety of definitions of the term robot. Depending on the definition used, the number of robot installations worldwide varies widely. Numerous single-purpose machines are used in manufacturing plants that might appear to be robots. These machines are hardwired to perform a single function and can’t be reprogrammed to perform a different function. Such single-purpose machines do not fit the definition for industrial robots that is becoming widely accepted. This definition was developed by the Robot Institute of America:A robot is a reprogrammable multifunctional manipulator designed to move material, parts, tools, or specialized devices through variable programmed motions for the performance of a variety of tasks.Note that this definition contains two words reprogrammable and multifunctional. It is these two characteristics that separate the true industrial robot from the various single-purpose machines used in modem manufacturing firms. The term reprogrammable implies two things: The robot operates according to written program, and this program can be rewritten to accommodate a variety of manufacturing tasks.The term “multifunctional”means that the robot can, through reprogramming and the use of different end-effectors, perform a number of different manufacturing tasks. Definitions written around these two critical characteristics are becoming the accepted definitions among manufacturing professionals.The first articulated arm came about in 1951 and was used by the U.S. Atomic Energy Commissions in 1954 , the first programmable robot was designed by George Devol. It was based on two important technologies:(1)Numerical control (NC)technology(2)Remote manipulator technologyNumerical control technology provided a form of machine control ideally suited to robots.It allowed for the control of motion by stored programs, these programs contain data points to which the robot sequentially moves , timing singals to initiate action and to stop movement, and logic statement so allow for decision-marking.Remote manipulator technology allowed a machine to be more than just another NC machine. It allowed such machines to become robots that can perform a variety of manufacturing tasks in both inaccessible and unsafe environments. By merging these two technologies, Devol developed the first industrial robot, an unsophisticated programmable materials handing machine.The first commercially produced robot was developed in 1959. In 1962 , the first industrial robot to be used on a production line was installed by General Motors Corporation. This robot was produced by Unimation, A major step forward in robot control occurred in 1973 with the development of the T-3 industrial robot by Cincinnlti mihcrcon. The T-3 robot was the first commercially produced Industrial robot controlled by a minicomputer.Numerical control and remote manipulator technology program the wide-scale development and use of industrial robots, but major technological developments do not take place simply because of such new capabilities. Something must provide the impetus for takingadvantage of these capabilities. In the case of industrial robots, the impetus was economics.The rapid inflation of wages experienced in the 1970s, tremendously increased the personnel costs of manufacturing firms. At the same time, foreign competition became a serious problem for U.S. manufacturers. Foreign manufacturers who had undertaken automation on a wide-scale basis, such as those in Japan, began to gain an increasingly large share of U.S. and world market for manufactured goods, particularly automobiles.Through a variety of automation techniques, including robots, Japanese manufacturers, beginning in the 1970s, were able to produce better automobiles more cheaply than non-automated U.S. manufacturers. Consequently, in order to survive, U.S. manufacturers were forced to consider any technological developments that could help improve productivity.It became imperative to produce better products at lower costs in order to be competitive with foreign manufacturers. Other factors such as the need to find better ways of performing dangerous manufacturing tasks contributed to the development of industrial robots. However,the principal rationale has always been, and is still, improved productivity.One of the principal advantages of robot is that they can be used in settings that are dangerous to humans, Welding and parting are examples of applications where robots can be used more safely than humans. Even though robots are closely associated with safety in the workplace, they can, in themselves, be dangerous.Robots and robot cells must be carefully designed and configured so that they do not endanger human workers and other machines. Robot work envelops should be accurately calculated and a danger zone surrounding the envelope clearly marked off. Red flooring strips and barriers can be used to keep human workers out of a robot’s work envelop.Even with such precautions it is still a good idea to have an automatic shutdown system in situations where robots are used. Such a system should have the capacity to sense the need for an automatic shutdown of operation, fault-tolerant computer and redundant systems can be installed to ensure proper shutdown of robotics systems to ensure a safe environment.工业机器人关于机器人术语的定义多种多样。
Unit 5 Industrial Robot工业机器人
1.Introduction
Current control only allows these devices to move form point to point in space, performing relatively simple tasks.
1.Introduction
Research to enable robots to “see”, “hear”, “touch”, and “listen” has been underway for two decades and is beginning to bear Fruit. However, the current technology of industrial robots is such that most robots contain only an Arm rather than all the anatomy a human possesses.
如果认为不同类型的加工有不同的功能,那 么一个数控加工中心也可以被认为是机器人 。大部分制造工程师认为数控加工中心不是 机器人,尽管他们有很多相似之处。
1.Introduction
The power drive and controllers of both NC machines and robots can be quite similar. Robots, like NC machines can be powered by electrical motors, hydraulic systems, or pneumatic systems.
Unit 5 Industrial Robot工业机器人
1.Introduction
A NC machining center would be qualified as a robot if one can interpret different types of machining as different functions. Most manufacturing engineers do not consider a NC machining center a robot, even though these machines have a number of similarities. 如果认为不同类型的加工有不同的功能,那 么一个数控加工中心也可以被认为是机器人 。大部分制造工程师认为数控加工中心不是 机器人,尽管他们有很多相似之处。
实际的机器人由带有腕(或称为臂)的主机 身和机器端部的工具(通常是某些的支撑器 )组成。机器人也可能有一个辅助动力系统 。
1.Introduction
A controller with some type of teach pendant, joy-stick, or key-pad is also part of the system. A typical robotic system is shown in Fig 5.1. 机器人系统还包括一个有一些示教板、操作 杆、键盘。一种典型的机器人系统如图5、1 。
闭环
closed-loop
单词
fiction companionship anatomy similarity evolve grick key pad gantry potential 虚构,想象 陪伴 (生物体)结构 相似之处 演化,演变
1.Introduction
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
附录外文文献原文Industrial RobotsDefinition“A robot is a reprogrammable,multifunctional machine designed to manipulate materials,parts,tools,or specialized devices,through variable programmed motions for the performance of a variety of tasks.”--Robotics Industries Association “A robot is an automatic device that performs functions normally ascribrd to humans or a machine in orm of a human.”--Websters Dictionary The industrial robot is used in the manufacturing environment to increase productivity . It can be used to do routine and tedious assembly line jobs , or it can perform jobs that might be hazardous to do routine and tedious assembly line jobs , or it can perform jobs that might be hazardous to the human worker . For example , one of the first industrial robots was used to replace the nuclear fuel rods in nuclear power plants . A human doing this job might be exposed to harmful amounts of radiation . The industrial robot can also operate on the assembly line , putting together small components , such as placing electronic components on a printed circuit board . Thus , the human worker can be relieved of the routine operation of this tedious task . Robots can also be programmed to defuse bombs , to serve the handicapped , and to perform functions in numerous applications in our society .The robot can be thought of as a machine that will move an end-of-arm tool , sensor , and gripper to a preprogrammed location . When the robot arrives at this location , it will perform some sort of task . This task could be welding , sealing , machine loading , machine unloading , or a host of assembly jobs . Generally , this work can be accomplished without the involvement of a human being , except for programming and for turning the system on and off .The basic terminology of robotic systems is introduced in the following :1. A robot is a reprogrammable , multifunctional manipulator designed to move parts , materials , tools , or special devices through variable programmed motions for the performance of a variety of different task . This basic definition leads to other definitions , presented in the following paragraphs , that give a complete picture of a robotic system .2. Preprogrammed locations are paths that the robot must follow to accomplish work . At some of these locations , the robot will stop and perform some operation , such as assembly of parts , spray painting , or welding . These preprogrammed locations are stored in the robot’s mem ory and are recalled later for continuous operation . Furthermore , these preprogrammed locations , as well as other program data , can be changed later as the work requirements change . Thus , with regard to this programming feature , an industrial robot is very much like a computer , where data can be stored and later recalled and edited .3. The manipulator is the arm of the robot . It allows the robot to bend , reach , and twist . This movement is provided by the manipulator’s axes , also called the degrees of freedom of the robot . A robot can have from 3 to 16 axes . The term degrees of freedom of freedom will always relate to the number of axes found on a robot .4. The tooling and grippers are not part of the robotic system itself ; rather , they are attachments that fit on the end of the robot’s arm . These attachments connected to the end of the robot’s arm allow the robot to lift parts , spot-weld , paint , arc-weld , drill , deburr , and do a variety of tasks , depending on what is required of the robot .5. The robotic system can also control the work cell of the operating robot . the work cell of the robot is the total environment in which the robot must perform its task . Included within this cell may be the controller , the robot manipulator , a work table , safety features , or a conveyor . All the equipment that is required in order for the robot to do its job is included in the work cell . In addition , signals from outside devices can communicate with the robot in order to tell the robot when it should assemble parts , pick up parts , or unload parts to a conveyor .The robotic system has three basic components : the manipulator , thecontroller , and the power source .A . ManipulatorThe manipulator , which does the physical work of the robotic system , consists of two sections : the mechanical section and the attached appendage . The manipulator also has a base to which the appendages are attached . Fig.1 illustrates the connection of the base and the appendage of a robot .The base of the manipulator is usually fixed to the floor of the work area . Sometimes , though , the base may be movable . In this case , the base is attached to either a rail or a track , allowing the manipulator to be moved from one location to another .As mentioned previously , the appendage extends from the base of the robot . The appendage is the arm of the robot . It can be either a straight , movable arm or a jointed arm . the jointed arm is also known as an articulated arm .The appendages of the robot manipulator give the manipulator its various axes of motion . These axes are attached to a fixed base , which , in turn , is secured to a mounting . This mounting ensures that the manipulator will remain in one location。