简谐振动的运动学
简谐振动最基本最重要的运动

当θ角很小时,有: M mgh —— 谐振
单摆:I mL2 h = L I
I
g
L
2 g
L
T 2 L
g
复摆:
2 mgh
I
T 2 I
mgh
振动周期均取决于系统本身。
七.谐振的能量
Ek
1 mv2 2
1 m 2 A2 sin 2 (
2
t
)
1 kA2 sin 2 (
2
t
)
Ep
1k 2
02 2 A、φ由初始条件决定。
若:
2>
2 0
则为过阻尼振动,物体将缓慢逼近平衡位置。
2 02
称为临界阻尼,物体回到平衡位置,并静止。
应用:电表中的电磁阻尼。临界阻尼。 二. 受迫振动
1.受迫振动 : 振动系统在周期性外力的持续作用 下发生的振动。此外力称驱动力。若强迫力按简谐 振动规律变化,则受迫振动也是谐振,周期为外力 的周期,振幅保持不变。
阻尼越小,振幅越大。
定量分析:
dA d (
f
)0
d p
d p
(
2 0
2 p
)2
4
2
2 p
得: 02 2
A Amax
f
Amax
2
02 2
阻力越小,ωp越接近ω0。同时 Aτ也越大。
β
0
ωτ
ω0
Amax
∞
§6. 谐振的合成
一.两个同方向 同频率的合成
x1 A1 cos( t 1) x2 A2 cos( t 2 )
A = A1- A2 为最小 二.同方向不同频率的合成 拍
合振动的振幅、频率均随时间变化,不是简谐振动。
简谐运动的动力学和运动学
2 简谐振动
简谐运动 最简单、最基本的振动
简谐运动
合成 分解
复杂振动
谐振子 作简谐运动的物体
第九章 振 动
5
物理学
第五版
9-1 简谐振动的动力学和运动学
二 简谐振动动力学特征
弹簧振子的振动
l0 k
m
A
o
x0 F 0
第九章 振 动
x
A
6
物理学
第五版
9-1 简谐振动的动力学和运动学
振动的成因
a 回复力 b 惯性
(2)简谐运动的动力学方程 d2 x 2 x
(3)简谐运动的运动学描述 dt 2
x A cos(t ) v A sin(t )
(4)加速度与位移成正比而方向相反
a 2 x
第九章 振 动
25
物理学
第五版
9-1 简谐振动的动力学和运动学
弹簧振子 k m
单摆 g l
复摆 mgl
16
物理学
第五版
9-1 简谐振动的动力学和运动学
2 周期、频率
x Acos(t ) Acos[(t T ) ]
周期 T 2π
x
注意
A
弹簧振子周期 o
A
T 2π m k
xt图
Tt
T 2
第九章 振 动
17
物理学
第五版
9-1 简谐振动的动力学和运动学
x Acos(t ) Acos[(t T ) ]
x Acos(t )
x x t图
A
T 2π 取 0
o
t
T
A
v A sin(t )
v
A
A cos(t π)
机械简谐振动的运动学与能量

机械简谐振动的运动学与能量引言机械简谐振动是物理学中重要的概念之一,它在很多领域都有广泛的应用。
本文将介绍机械简谐振动的运动学和能量方面的内容。
首先,我们将对机械简谐振动的定义进行说明,接着讨论它的运动学表达式,最后深入探讨与机械简谐振动相关的能量变化。
机械简谐振动的定义机械简谐振动是指在无外力作用的情况下,质点围绕平衡位置做线性回复的振动。
简谐振动的运动规律可以用如下的数学表达式表示:$$x(t) = A \\cdot \\sin(\\omega t +\\varphi)$$其中,x(t)表示质点在时间t时的位移,A是振幅,$\\omega$是角频率,$\\varphi$是相位常数。
机械简谐振动的运动学机械简谐振动的运动学研究主要关注质点的位移、速度和加速度随时间的变化规律。
1.位移:如前文所述,机械简谐振动的位移可以用上述的数学表达式表示。
位移随时间的变化是一个正弦曲线,振幅A决定了曲线的最大值,相位常数$\\varphi$则决定了曲线在时间轴上的平移。
2.速度:速度是位移对时间的导数,可以通过对位移函数求一阶导数得到:$$v(t) = A\\omega \\cdot \\cos(\\omega t + \\varphi)$$速度也是一个正弦曲线,它的幅值$A\\omega$是振幅和角频率的乘积,相位常数$\\varphi$则决定了曲线在时间轴上的平移。
3.加速度:加速度是速度对时间的导数,可以通过对速度函数求一阶导数得到:$$a(t) = -A\\omega^2 \\cdot \\sin(\\omega t + \\varphi)$$加速度也是一个正弦曲线,它的幅值$-A\\omega^2$是振幅和角频率的平方的乘积,相位常数$\\varphi$则决定了曲线在时间轴上的平移。
机械简谐振动的运动学分析可以帮助我们了解振动物体在不同时刻的位移、速度和加速度情况,从而更好地描述和预测振动过程。
机械简谐振动的能量在机械简谐振动中,质点的能量会随着时间的变化而发生变化。
简谐运动的表达式动力学表达式
性,在关于平衡位置对称的两个位置,动能、势 能相等,位移、回复力、加速度大小相等,方向 相反,速度大小相等,方向可能相同,也可能相 反,振动过程相对平衡位置两侧的最大位移值相等.
3.周期性——简谐运动的物体经过相同时间t=nT(n) 为整数,必回复到原来的状态,经时间t=(2n+1) T2 (n为整数),则物体所处的位置必与原来的位置 关于平衡位置对称,因此在处理实际问题中,
图2 3.简谐运动的能量
简谐运动过程中动能和势能相互转化,机械能 守恒,振动能量与 振幅 有关, 振幅 越大, 能量越大.
二、简谐运动的两种基本模型
弹簧振子(水 平)
单摆
模型示意图
条件 平衡位置
回复力
忽略弹簧质量、 无摩擦等阻力
细线不可伸长、质量 忽略、无空气等阻力、 摆角很小
弹簧处于原长处
最低点
度方向上的力充当向心力,即F向=F-mgcosθ;摆 球重力在平行于速度方向上的分力充当摆球的回复
力.当单摆做小角度摆动时,由于F回=-mgsinθ= - mg x=-kx,所以单摆的振动近似为简谐运动.
l
3.单摆的周期公式 (1)单摆振动的周期公式T=2π l ,该公式提供了
g
一种测定重力加速度g的方法. (2)l为等效摆长,表示从悬点到摆球重心的距离, 要区分摆长和摆线长,悬点实质为摆球摆动所在
2. 简谐运动的描述 (1)描述简谐运动的物理量 ①位移x:由平衡位置指向振动质点所在位置的 有向线段表示振动位移,是矢量. ②振幅A:振动物体离开平衡位置的最大距离, 是标量,表示振动的强弱. ③周期T和频率f:做简谐运动的物体完成 一次 全振动所需要的时间叫周期,而频率则等于单 位时间内完成 全振动的次数 ;它们是表示振动 快慢的物理量.二者互为倒数关系.
简谐振动的方程

x Acos(t )
(4)
约定(4)式简谐振动的运动学方程
1 简谐振动速度 加速度
v dx A sin(t )
dt
a
d2x dt 2
A 2
cos(t
)
x
x t 图
A
t
x Acost
Hale Waihona Puke vt 图A vv A sint
t
A cos(t )
2
a t 图
a
A 2
t
a A2 cost
A2 cos(t )
2 描述简谐振动的特征量
(1)振幅 A
x Acos(t )
(2)周期、频率、圆频率
弹簧振子 k
m
单 摆 g
l
T 2 m
k
T 2 l
g
1 k 2 m
1 g 2 l
复 摆 mgh T 2 I 1 mgh
I
mgh
2 I
(3) 位相和初位相
x Acos(t 0 )
t 0 — 位相,决定谐振动物体的运动状态 0 是t =0时刻的位相—初位相
1 7
66
3.14s1
A vm 31.4 10cm
3.14
故振动方程为 x 10 cos( t )cm
6
方法2:用旋转矢量法辅助求解。
x Acos(t )
v
A
sin(t
)
vm
cos(t
2
)
vm A 31.4cms1
v的旋转矢量与v轴夹角表示t 时刻相位
t
(4)简谐振动的旋转矢量表示法
t t A
t
t 0
x
o
x
02简谐振动的运动学精品PPT课件
19
t t
o
A
t
x
x Acos(t )
点旋以转o矢为量原A
的端点在 x 轴
上的投影点的
运动为简谐运
动.
第4章 机械振动
4–2 简谐振动的运动学
20
y
vm t π
2
t an
A
0
a
v
x
x Acos(t )
vm A v A sin(t )
an A 2
a A 2 cos(t )
雌性蚊子 雄性蚊子 苍蝇 黄蜂
355~415 455~600 330 220
第4章 机械振动
4–2 简谐振动的运动学
例 如图所示系统(细线的质 量和伸长可忽略不计),细线 静止地处于铅直位置,重物位 于O 点时为平衡位置.
若把重物从平衡位置O 略 微移开后放手, 重物就在平衡 位置附近往复的运动.这一振 动系统叫做单摆. 求单摆小角 度振动时的周期.
12
x 简谐运动中, x和 v
间不存在一一对应的关系. A
x A cos(t 0 ) o
v A sin(t 0 ) A
v v
T 2
xt 图
v T t
3、位相和初位相 t 0
1) t 0 (x, v) 存在一一对应的关系;
2)相位在 0 ~ 2π 内变化,质点无相同的运动状态;
相差 2nπ (n为整数 )质点运动状态全同.(周期性)
4–2 简谐振动的运动学
1
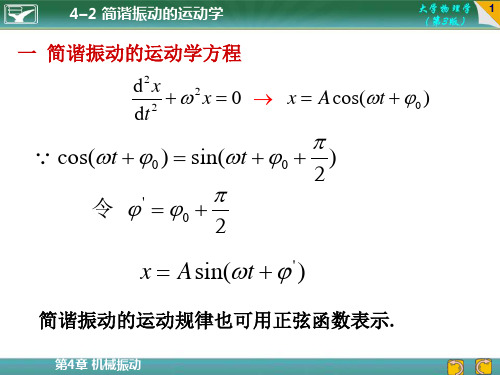
一 简谐振动的运动学方程
d2x 2x 0
dt 2
x Acos(t 0 )
cos(t
0
)
sin(t
0
2
)
高中物理:简谐运动
一、简谐运动1、机械振动(1)平衡位置:物体振动时的中心位置,振动物体未开始振动时相对于参考系静止的位置,或沿振动方向所受合力等于零时所处的位置叫平衡位置。
(2)机械振动:物体在平衡位置附近所做的往复运动,叫做机械振动,通常简称为振动。
(3)振动特点:振动是一种往复运动,具有周期性和重复性。
2、简谐运动(1)弹簧振子一个轻质弹簧联接一个质点,弹簧的另一端固定,就构成了一个弹簧振子。
(2)振动形成的原因①回复力:振动物体受到的总能使振动物体回到平衡位置,且始终指向平衡位置的力,叫回复力。
振动物体的平衡位置也可说成是振动物体振动时受到的回复力为零的位置。
②形成原因:振子离开平衡位置后,回复力的作用使振子回到平衡位置,振子的惯性使振子离开平衡位置;系统的阻力足够小。
振子的运动A→O O→A′A′→O O→A对O点位移的方向怎样?大小如何变化?向右减小向左增大向左减小向右增大回复力的方向怎样?大小如何变化?向左减小向右增大向右减小向左增大(4)简谐运动的力学特征①简谐运动:物体在跟偏离平衡位置的位移大小成正比,并且总指向平衡位置的回复力的作用下的振动,叫做简谐运动。
②动力学特征:回复力F与位移x之间的关系为F=-kx式中F为回复力,x为偏离平衡位置的位移,k是常数。
简谐运动的动力学特征是判断物体是否为简谐运动的依据。
③简谐运动的运动学特征a=- x加速度的大小与振动物体相对平衡位置的位移成正比,方向始终与位移方向相反,总指向平衡位置。
简谐运动加速度的大小和方向都在变化,是一种变加速运动。
简谐运动的运动学特征也可用来判断物体是否为简谐运动。
二、简谐运动的描述1、振幅(1)定义:振动物体离开平衡位置的最大距离,用A表示。
(2)单位:在国际单位制中,振幅的单位是米(m)。
(3)物理意义:表示振动强弱的物理量,振幅越大,表示振动越强。
2、周期(1)全振动:振动物体往返一次(以后完全重复原来的运动)的运动叫做一次全振动,例如水平方向运动的弹簧振子的运动:O→A→O→A’→O 或A→O→A’→O→A为一次全振动。
简谐振动的方程
m
O
x X
k mg / l
令向下有位移x, 则 f mg k (l x) kx
作谐振动
设振动方程为
x A cos(t 0 )
k m g l 9.8 10rad / s 0.098
由初条件得
A x0 (
2
v0
) 2 0.098m
0 是t =0时刻的位相—初位相
(4)简谐振动的旋转矢量表示法
A
t
t t
t0
o
x
x
x A cos(t )
请看动画……
用旋转矢量图画简谐运动的 x t 图
三 简谐运动的特征
1)
2) 3)
F kx
d2 x 2 x 2 dt
(平衡位置
x0 )
v0 0 arctg ( ) 0, x0
由x0=Acos0=-0.098<0 cos0<0, 取0= 振动方程为:x=9.810-2cos(10t+)m
(2)按题意 t=0 时
m
O
x X
x0=0,v0>0
x0=Acos0=0 , cos0=0 0=/2 ,3/2 v0=-Asin>0 , sin 0 <0, 取0=3/2 x=9.810-2cos(10t+3/2) m
x t 图
x A cos t
x
A
t
v t 图
v A sin t
A cos(t
A
2 )
2
v
t
a t 图
a A 2 cos t
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
)
02 Acos(0t π)
速度比加速度相位落后 π 位移比速度相位落后 π
2
2
弹性力 Fx ma x kAcos(0t π)
上页 下页 返回 结束
第九章 振 动
§9.2.2 简谐振动的 x-t 图线和相轨迹
1. x-t 图线 振幅大小决定曲线的“高低”,频率影响曲线
的“密集和疏散”.
角频率()—— 2 秒内完成振动的次数.也称固有频率.
1 0
T 2π
0 2π
2π T
简谐振动的运动学方程
x(t) Acos(0t ) x(t) Acos(2π t )
T
x(t) Acos(2πt )
T、 和由振动系统本身的性质决定.
上页 下页 返回 结束
第九章 振 动
(2) 振幅 振幅A—— 物体离开平衡位置最大位移的绝对值.
二振动相位差 ( 2 - 1 ), 若 ( 2 - 1 ) = 2n ,n为整数,称两简谐振动同相位. 若 ( 2 - 1 ) = (2n+1), n为整数,称两简谐振动反相位.
上页 下页 返回 结束
第九章 振 动
[例题3] 某简谐振动规律为 x Acos(10t ) 初始条件 为 t 0, x0 1, v0x 10 3 ,求该振动的振幅和初相位.
初相() ,t = 0 时的相位. tan v0 x0
一定的相位对应一定的运动状态.
如图a、b两点运动状 x
态不同,相位亦不同.
c和a运动状态同,
t
相位差2n .
ab
c
用相位表征质点振动状态的优点在于它充分反映了 振动周期性特征.
上页 下页 返回 结束
第九章 振 动
[例题1] 质点按 x Acos(0t ) 作简谐振动.设于
[解]
A
x02
v02x
02
2m
tan v0x 10 3 3
0 x0
10 1
由初始条件得 60 π
3
上页 下页 返回 结束
第九章 振 动
3.简谐振动的速度和加速度
x Acos(0t )
vx
dx dt
A0
sin(0t
)
0 Acos(0t
π) 2
ax
dvx dt
02 Acos(0t
x x
O
t
初相位 = 0
0
O
t
0t 0
t
0
上页 下页 返回 结束
2. 相轨迹(相图)
x2
v
2 x
02
A2
第九章 振 动 vx
O
x
上页 下页 返回 结束
§9.2.3 简谐振动矢量表示
第九章 振 动
v
0A
0t π 0t
π 2
a
2 0
A
A(t )
0t A(t 0)
A
O x Ax
第九章 振 动
§9.2简谐振动的运动学
§9.2.1 简谐振动的运动学方程
1. 简谐振动的运动学方程 2. 特征量物理意义 3. 简谐振动的速度和加速度
§9.2.2 简谐振动的 x-t 图线和相轨迹
1. x-t 图线 2. 相轨迹(相图)
§9.2.3 简谐振动矢量表示
上页 下页 返回 结束
第九章 振 动
x( t ) = x( t +T )
Acos(0 t + ) = Acos[0(t + T )+ ]
0T = 2 n
T 的最小值
T 2π 0
弹簧振子、单摆和扭摆周期分别为
T 2π m k
T 2π l g
T 2π I c
上页 下页 返回 结束
第九章 振 动
频率()—— 单位时间内物体所作完全振动的次数.
A由初始条件定.
x Acos(0t )
vx
dx dt
A0
sin(0t
)
设 t = 0, x = x0 ,v = v0
则 x0 Acos
v0 A0 sin
A
x02
v02
2 0
上页 下页 返回 结束
第九章 振 动
(3) 相位和初相位
相位 =( t + ),决定振动系统在任意瞬时的运动状态.
二振动相位相同,即振动状态相同,同步调.
(2) 1 2 (2n 1)π (n 0,1,, n)
x2 A2 cos[0t 1 (2n 1)π] A2 cos(0t 1) v2x 0 A2 sin(0t 1)
二振动相位相反,即二振动反步调.
上页 下页 返回 结束
第九章 振 动 两简谐振动步调的比较
某时刻, 相位 0t 时质点的运动状态如何?
0,
π,
π 2
,
π 2
,
问在这些瞬
[解]振动状态由x 、v 定
x Acos(0t )
0t 0
0t π
0t
π 2
0t
π 2
vx
dx dt
A0
sin(0t
)
x A, vx 0
x A, vx 0
x 0, vx 0 A
x 0, v x 0 A
第九章 振 动
[解] (1) 1 2 2nπ
(n 0,1,, n)
x1 A1 cos(0t 1 )
v1x 0 A1 sin(0t 1)
x2 A2 cos(0t 2 )
A2 cos(0t 1 2nπ) A2 cos(0t 1 )
v2x 0 A2 sin(0t 2 ) 0 A2 sin(0t 1)
§9.2简谐振动的运动学
§9.2.1 简谐振动的运动学方程
1. 简谐振动的运动学方程
简谐振动的动力学方程
d2 dt
x
2
2 0
x
0
=0
其解
x(t) Acos(0t )
x
m
Ox
或
x(t) Asin(0t )
A与 由初始条件定.
上页 下页 返回 结束
第九章 振 动
2. 特征量物理意义 (1)周期、频率和圆频率 周期(T)—— 系统作一次完整振动所需时间.
矢量末端在x 轴上投影点的运动规律:
x Acos(0t )
上页 下页 返回 结束
第九章 振 动
[例题4] 如图右方表示 某简谐振动的 x-t 图,试用作 图方法画出 t1 和 t2 时刻的旋转矢量的位置.
[解]
x A
x
A
P1
O
B
t1 O B
t2 P2
t
上页 下页 返回 结束
上页 下页 返回 结束
第九章 振 动
[例题2] 二同频率不同振幅的简谐振动表示为
x1 A1 cos(0t a1 )
x2 A2 cos(0t a2 )
试分别就 1 2 2nπ
(n 0,1,, n)
和 1 2 (2n 1)π (n 0,1,, n) 的情况比较两种振动.
上页 下页 返回 结束