《控制工程基础》第二章
控制工程基础第二章参考答案

第二章 参考答案2-1 (1) 不是 (2) 是 (3) 不是 (4) 不是 2-2 (a))()()(3)(2222t u t u dtt du RC dt t u d C R i o o o =++ (b) )()()()()()()()(2211222121222111222121t u dtt du C R C R dt t u d C C R R t u dt t du C R C R C R dt t u d C C R R i i i o o o +++=++++ (c ) )()()()()()(33221312221t u R dtt du C R R t u R R dt t du C R R R R R i i o o +=++++(d))()()()()()()()(1211222121211211222121t u dtt du C R C R dt t u d C C R R t u dt t du C R C R C R dt t u d C C R R i i i o o o +++=++++ (e))()()()()()()()(221222121211222222121t u dtt du R C C dt t u d C C R R t u dt t du C R C R C R dt t u d C C R R i i i o o o +++=++++ (f) )()()()()()()(22121221t u R dtt du L t u R R dt t du L C R R dt t u d CL R i i oo o +=++++ 2-3 (a) )]()([)()()(23213121t u R dtt du C R R t u R dt t du C R R R R i i o o +=++-(b) )()()()(4141232022213210t u R R t u R R dt t du C R R R dt t u d C C R R R R i o o o -=++ (c))]()()([)(32321t u R R dtt du C R R t u R i i o ++=-(d) )()()()()(221122212121t u dt t du C R C R dt t u d C C R R dt t du C R i i i o +++=- (e) )()()()(2412222142t u dtt du C R C R dt t u d C C R R o o o +++ )}()(])([)({21213224223221432132t u dtt du R R C C R R C R dt t u d R R C C R R R R R R i i i +++++++=- 2-4 (a) dt t dx f dt t dx f f dt t x d m i o o )()()()(12122=++ (b) dt t dx f k t x k k dt t dx f k k i o o )()()()(12121=++ (c) )()()()()(121t x k dt t dx f t x k k dt t dx f i i o o +=++ (d) )()()()()()(112121t x k dtt dx f t x k k dt t dx f f i i o o +=+++2-5 (a))(1)()()()(1)()()(2112212221211*********t u C C dt t du C R C R dt t u d R R t u C C dt t du C R C R C R dt t u d R R i i i o o o +++=++++ (b))()()()()()()()(2112212221211211212221t x k k dtt dx k f k f dt t x d f f t x k k dt t dx k f k f k f dt t x d f f i i i o o o +++=++++ 由(a)(b)两式可以看出两系统具有相同形式的微分方程,所以(a)和(b)是相似系统。
控制工程基础第二章控制系统传递函数推导举例

控制工程基础第二章控制系统传递函数推导举例嘿,大家好!今天咱们聊聊控制系统传递函数的推导。
可能有小伙伴会觉得:哎呀,这听起来很高深啊!其实不用担心,咱们就把它当成一种“魔法”来聊,保证你看懂了还觉得有趣。
大家都知道,控制系统就像是你家的空调,或者你车里的自动驾驶系统,它们都是通过某种方式“控制”你想要的目标,调节着温度、速度啥的。
而这个“控制”背后的原理,常常就是传递函数。
咱们今天就来拆解这个“神秘的传递函数”,看看它究竟是怎么来的,别怕,咱们一步步来,轻松愉快地搞定。
咱们得明白一个事情,什么叫控制系统的传递函数。
你想象一下,你开车,踩油门,车速开始变快,对吧?油门和车速之间的关系就可以通过传递函数来表示。
这个函数就告诉你,输入的油门大小会如何影响到输出的车速。
比如,油门踩了30%和踩了70%,车速变化的幅度是不一样的,这就是控制系统的“响应”。
传递函数就是描述这种输入与输出之间关系的数学工具,简单点说,它告诉你“输入多少,输出多少”的一个规律。
那传递函数怎么来呢?这就得讲讲拉普拉斯变换了。
别急,拉普拉斯变换其实不难,它就像是个“超级变压器”,能把复杂的时间域问题转换成比较简单的频率域问题,简化计算。
你想,咱们从时间域跳到频率域,就好像从三维空间跳到二维平面,一下子就好理解多了。
你现在是不是觉得拉普拉斯变换就像是一剂神奇的“解药”呢?哈哈,别着急,咱们往下说。
一般来说,控制系统的推导步骤差不多都可以分为两大部分:建模和求传递函数。
啥叫建模呢?简单来说,就是先给系统做个“影像图”,把系统的各个部件之间的关系搞明白。
比如说,车的油门、发动机、车轮之间怎么互动,反正你得先把这些“元素”都搞清楚。
然后,你就可以通过这些元素的物理特性来写出一堆数学方程。
这些方程就是系统的动态模型,它们描述了输入和输出之间的关系。
不过,建模归建模,咱们得回过头来聊传递函数。
传递函数就是你把这个系统的方程化简后的结果,通常用大写字母“G”来表示。
控制工程基础第二章拉普拉斯变换
n
(t≥0, n> -1且为整数)
其拉氏变换 为 n
L[t ] t e dt
n st 0
n! L[t ] n 1 s
n
单位阶跃函数 、 单位斜坡函数及单 位加速度函数分别 是幂函数 t n (n 1) 当n=0、 n=1 及 n=2时的特例。
page 15
L1 L e2t Lcos3t L t 3 L t
1 1 s 6 2 4 1 s s2 s 9 s
page 20
机电工程学院
第二章
拉普拉斯变换
二、延时定理(Time-Shift Theorem)
若有
L[ f (t )] F ( s) ,对任意实数 a ,则
at
st
page 12
机电工程学院
第二章
拉普拉斯变换
(六)正弦函数 正弦函数(Sine Function)的数学表达式为 式中,
控 制 工 程 基 础
为正弦函数的角频率。
0
r (t ) sin t
(t≥0)
其拉氏变换 为
L[sin t ] sin t e dt
机电工程学院
第二章
拉普拉斯变换
二、典型时间函数的拉氏变换
常用的时间函数有:
控 制 工 程 基 础
单位脉冲函数、单位阶跃函数、单位斜坡函数、单位加 速度函数、指数函数、正弦函数、余弦函数、以及幂函数等。
page
6
机电工程学院
第二章
拉普拉斯变换
(一)单位脉冲函数
单位脉冲函数(Unit Impulse Function)也称为 函数或称狄 拉克函数(Dirac Function),其 变化曲线如图2-1-1, 数学表达式为:
控制工程基础_第二章(2017)
时,
R F (s) s
18
例 求单位斜坡函数f(t)=t的拉氏变换。 f (t )
单位斜坡函数如图(b) 所示,定义为
0 t 0 f (t ) t t 0
解:利用定义式,可得
O
t
(b)单位斜坡函数
F (s)
0
1 1 st 1 1 st 1 st t e dt t ( e ) e dt 0 e 2 0 0 s s s s 0 s
12
二.举例
1.机械系统的微分方程式
机械系统设备大致分两类:平移的和旋转的。它们之间的区 别在于前者施加的力而产生的是位移,而后者施加的是扭矩产生 的是转角。
牛顿定律和虎克定律等物理定律是建立机械系统数学模型的基础
c1 m c2 xo xi
例1(1)如图所示机械系统。求其微分方程,图中Xi 表示输入位移,Xo 表示输出位移,假设输出端无负 载效应。(c、c1、c2为阻尼系数,k1、k2为弹性系数) 由牛顿定律有: 化为标准式得:
st
例 求单位脉冲函数的拉氏变换。 单位脉冲函数如图(c)所示。定义为
0 t 0 且 (t ) t 0
0
f (t )
(t )
O
0
(t )dt 1
0
t
F ( s) (t )e st dt (t )e st dt (t )e st dt f (0) e st
图c
14
(4)机械旋转系统 图中所示转动惯量为J的转子与弹性系数为k的弹性轴和阻尼 系数为B的阻尼器连接。假设外部施加扭矩m(t),则系统产生一个 偏离平衡位置的角位移(t) 。研究外扭矩m(t)和角位移(t)的关系。
控制工程基础第2章答案
第2章系统的数学模型(习题答案)2.1什么是系统的数学模型?常用的数学模型有哪些?解:数学模型就是根据系统运动过程的物理、化学等规律,所写出的描述系统运动规律、特性、输出与输入关系的数学表达式。
常用的数学模型有微分方程、传递函数、状态空间模型等。
2.2 什么是线性系统?其最重要的特性是什么?解:凡是能用线性微分方程描述的系统就是线性系统。
线性系统的一个最重要的特性就是它满足叠加原理。
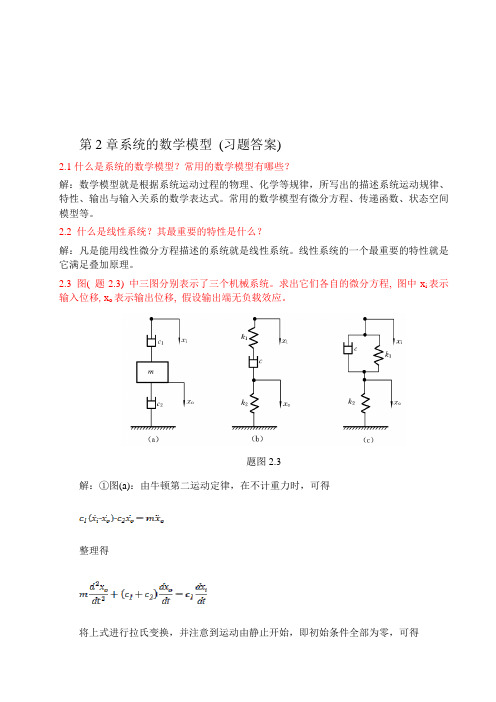
2.3 图( 题2.3) 中三图分别表示了三个机械系统。
求出它们各自的微分方程, 图中x i表示输入位移, x o表示输出位移, 假设输出端无负载效应。
题图2.3解:①图(a):由牛顿第二运动定律,在不计重力时,可得整理得将上式进行拉氏变换,并注意到运动由静止开始,即初始条件全部为零,可得[]于是传递函数为②图(b):其上半部弹簧与阻尼器之间,取辅助点A,并设A点位移为x,方向朝下;而在其下半部工。
引出点处取为辅助点B。
则由弹簧力与阻尼力平衡的原则,从A和B两点可以分别列出如下原始方程:消去中间变量x,可得系统微分方程对上式取拉氏变换,并记其初始条件为零,得系统传递函数为③图(c):以的引出点作为辅助点,根据力的平衡原则,可列出如下原始方程:移项整理得系统微分方程对上式进行拉氏变换,并注意到运动由静止开始,即则系统传递函数为2.4试建立下图(题图2.4)所示各系统的微分方程并说明这些微分方程之间有什么特点,其中电压)(t u r 和位移)(t x r 为输入量;电压)(t u c 和位移)(t x c 为输出量;1,k k 和2k 为弹簧弹性系数;f 为阻尼系数。
+-+-C)(t u r )(t u c )(t r )(t x c f1k 2k CR)(t u r )(u c +-+-f)(t r )(t x c )(a )(b )(c )(d R 2R题图2.4【解】:)(a方法一:设回路电流为i ,根据克希霍夫定律,可写出下列方程组:⎪⎩⎪⎨⎧=+=⎰i R u u dt i C u cc r 1消去中间变量,整理得:dtdu RC u dt du RCrc c =+方法二:dtdu RC u dt du RCRCs RCs CsR R s U s U rc c r c =+⇒+=+=11)()( 由于无质量,各受力点任何时刻均满足∑=0F ,则有:cc r kx dt dxdt dx f =-)(dtdx k f x dt dx k f rc c =+⇒()r r c c r c u dtduC R u dt du C R R Cs R R Cs R Cs R R CsR s U s U +=++⇒+++=+++=221212212)(1111)()( 设阻尼器输入位移为a x ,根据牛顿运动定律,可写出该系统运动方程r rc c aa c a r c r x dtdx k f x dt dx f k k k k dt dx f x x k x x k x x k +=++⇒⎪⎩⎪⎨⎧=--=-22121221)()()( 结论:)(a 、)(b 互为相似系统,)(c 、)(d 互为相似系统。
控制工程基础第二章

1 i
c
c
第二章 控制系统的数学模型
2-3 典型环节及其传递函数
环节:具有某种确定信息传递关系的元件、元件 组或元件的一部分称为一个环节。 系统传递函数可写为:
G( s)
K ( i s 1) ( s 2 j j s 1)
2 2 j
b
c
s
(T s 1) (T
max
u (t )
U ( s) E G( s) Kp (s) max
第二章 控制系统的数学模型
一对与上面相同的电位器可以组成误差检测器。
u (t ) u1 (t ) u2 (t ) K p (1 (t ) 2 (t )) K p (t )
U ( s) G ( s) Kp ( s )
fms
M m J m s 2m (s) f msm (s)
m ( s) Cm Km 2 U a ( s) J m s ( f m C ) s s(Tm s 1)
第二章 控制系统的数学模型
绳轮传递 :
L(s) rm (s)
测量电位计 :
m (s)
r
L(s)
I 2 (s) U1 (s)Cs
U1(s)
CS
I2(s)
U1 (s) U r (s) Uc (s)
Ur(s) +
U1(s) Uc(s)
第二章 控制系统的数学模型
将上面的各环节(元件)的部分综合有:
Ur(s) +
U1(s) -
1 R1
Cs
I1(s) I(s) R2 + + I2(s)
Uc(s)
控制工程基础第二章第二部分

bm1s bm an1s an
(n m)
6
第二章 数学模型 特征方程、零点和极点
考试会考求增益K,特征方程的 零点和极点
➢ 特征方程
令:M (s) b0sm b1sm1 bm1s bm
N (s) a0sn a1sn1 an1s an
LCs2
1 RCs
1
3/4/2020
4
第二章 数学模型
几点结论
✓ 传递函数是复数s域中的系统数学模型, 其参数仅取决于系统本身的结构及参数, 与系统的输入形式无关。
✓ 若输入给定,则系统输出特性完全由传递函 数G(s) 决定,即传递函数表征了系统内在的 固有动态特性。
✓ 传递函数通过系统输入量与输出量之间的关
第二章 数学模型
第二章 控制系统的数学模型
○、数学模型的基本概念 一、控制系统的运动微分方程 二、非线性数学模型的线性化
三、拉氏变换和拉氏反变换 四、传递函数 五、系统方框图和信号流图 六、控制系统传递函数推导举例 七、小结
3/4/2020
1
第二章 数学模型
四、传递函数
传递函数的概念和定义 ➢ 传递函数 在零初始条件下,线性定常系统输出量的拉氏 变换与引起该输出的输入量的拉氏变换之比。
式中,T—积分环节的时间常数。
3/4/2020
28
积分环节的单位阶跃响应
Xi (s)
1
Xo (s)
Ts
xi (t)
x0 (t)
T1
1
1
T2 , T2 T1
0 t1
0
t
t1
t
输出随着时间线性增长,一旦输入为零,输出停止
控制工程基础第二章-2

§2-2 拉氏变换及反变换 卷积定理
L f (t ) g(t ) F ( s)G( s)
其中,f(t)g(t)表示函数f(t)和g(t)的卷积。 若t<0时, f(t)=g(t)=0,则f(t)和g(t)的卷积可 表示为:
f (t ) * g(t ) f (t ) g( )d f ( ) g(t )d
0 0
f(t) 1
0 1 s lim (1 e ) 单位脉冲函数 0 s s 1 ( 1 e ) s lim (1 e ) lim 由洛必达法则: 0 s 0 ( s ) e s 1 所以: L (t ) lim [e
at
] e e
0
e dt dt
0 t
st
( s a )t
1 , (Re(s a ) 0) sa
指数函数
第二章 控制系统的数学模型
§2-2 拉氏变换及反变换 正弦函数与余弦函数 (sinusoidal & cosine function)
0
st e df ( t ) e st f (t )e dt f (t ) 0 dt s 0 dt s
st
f (0) 1 df (t ) L 即: F ( s ) s s dt
第二章 控制系统的数学模型
§2-2 拉氏变换及反变换
F(s)称为函数f(t)的拉普拉氏变换或象函数, 它是一个复变函数;f(t)称为F(s)的原函数; L为拉氏变换的符号。
第二章 控制系统的数学模型
§2-2 拉氏变换及反变换
2.2 几种典型函数的拉氏变换
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第二章 系统的数学模型
2.2 系统的微分方程
例2-6 下图所示为一电网络系统,其输入为电压u(t),
输出为电容器的电量q(t),列写该系统微分方程。
L u i R C
解:根据克希荷夫电压定律,得
di (t ) 1 u (t ) L Ri (t ) i(t )dt dt C dq(t ) ∵ i (t ) dt
2)进行受力分析,列写微分方程,
f (t ) m x (t) c· k x (t)
利用
F ma ,得
(t ) m (t ) f (t ) kx(t ) cx x
3)整微分方程,得
(t ) cx (t ) kx(t ) f (t ) m x
第二章 系统的数学模型
等于各个输入单独作用而产生的输出之和。 和的响应等于响应之和。
第二章 系统的数学模型
2.2 系统的微分方程
微分方程
2.2 系统的微分方程
在时域中描述系统(或元件)动态特性的 数学模型,或称为运动方程。利用微分方程可 得到描述系统(或元件)动态特性的其他形式 的数学模型。
(t ) cy (t ) ky(t ) x(t ) 如: m y
消去中间变量i(t),并整理得,
(t ) RC q (t ) q(t ) Cu(t ) LCq
第二章 系统的数学模型
2.2 系统的微分方程
例2-7 下图所示为一个两级串连的RC电路组成的滤波 网络,输入为电压ui,输出为电压uo。分析ui, uo与系 统之间的动态关系,列写该系统微分方程。
2.2 系统的微分方程
例2-2 下图所示为一简化了的机械系统,求其输入 x(t)与输出y(t)之间的微分方程。 解:在不同的元素之间,可能会有中 间变量。 设中间变量x1,且假设x>x1>y。 取分离体阻尼活塞和缸体部分,并 进行受力分析,
图2-2
第二章 系统的数学模型
根据受力分析,列写微分方程组, k1 x(t ) x1 (t ) cx1 (t ) y (t ) (1)
第二章 系统的数学模型
2.1 2.2 2.3 2.4 2.5 2.6
概述 系统的微分方程 拉普拉斯变换与拉普拉斯反变换 系统的传递函数 系统的传递函数方框图及其简化 考虑扰动的反馈控制系统的传递函数
第二章 系统的数学模型
本章教学大纲
本章教学大纲
1. 掌握机械、电气系统微分方程的建立方法;
第二章 系统的数学模型
2.3 拉氏变换与拉氏反变换
表1 拉氏变换对照表
第二章 系统的数学模型
2.3 拉氏变换与拉氏反变换
二、拉氏变换的定理 1. 线性定理 和的拉氏变换等于拉氏变换之和。 设L[f1(t)]=F1(s),L[f2(t)]=F2(s),则 L[af1(t)+bf2(t)]=aF1(s)+bF2(s) 例 已知f(t)=1-2cosωt,求F(s)。 2. 平移定理(复数域的位移定理) 若L[f(t)]=F(s),对任一常数a(实数或复数),则有
cx1 (t ) y (t ) k2 y (t )
(2)
2.2 系统的微分方程
消去中间变量x1(t),得,
k2 k1 x(t ) x1 (t ) k 2 y (t ) x1 (t ) x(t ) y (t ) k1 将x1(t)代入(2),整理得系统微分方程为,
第二章 系统的数学模型
(1)克希荷夫电流定律
2.2 系统的微分方程
若电路有分支路,它就有节点,则会聚到某节点的所
有电流之代数和应等于0(即所有流出节点的电流之
和等于所有流进节点的电流之和),
i(t ) 0
A
如右图所示,
i1 i2
A i3
i(t ) i i
1 A
2
i3 0
2.2 系统的微分方程
R1
R2
Ⅰ
C1
Ⅱ
C2
uo
消去中间变量i1、i2,整理得,
o (t ) ( R1C1 R1C2 R2C2 )u o (t ) uo (t ) ui (t ) R1R2C1C2u
第二章 系统的数学模型
2.2 系统的微分方程
负载效应: 是指对于由两个物理元件组成的系统而
第二章 系统的数学模型
三、线性系统与非线性系统
2.1 概 述
1. 定义 能用线性微分方程描述的系统为线性系统,否则为 非线性系统。 2. 分类 线性定常系统:
线性时变系统:
非线性系统:
第二章 系统的数学模型
3. 特性
2.1 概 述
线性系统满足叠加原理;非线性系统不满足叠加原理。
叠加原理:线性系统在多个输入的作用下,其总输出
第二章 系统的数学模型
二、建立数学模型(建模)的方法
2.1 概 述
一个“合理”的数学模型应该以最简化的形式、准 确地描述系统的动态特性。
1. 分析法(解析法) 建
根据系统或元件所遵循的有关定律来建立数学 模 模型的方法(列写数学表达式)。 方 2. 实验法 法 根据实验数据进行整理,并拟合出比较接近实 际的数学模型。
0 (t ) u0 (t ) ui (t ) RCu
第二章 系统的数学模型
一、列写微分方程的一般方法
2.2 系统的微分方程
给定输入量、扰动量
1. 确定系统的输入量和输出量; 2. 按信号传递的顺序,从系统输入端出发,根据各变量 所遵循的物理定律列写系统中各环节的动态微分方程; 3. 消除中间变量,得到只包含输入量和输出量的微分方程 牛顿第二定律、克希荷夫电流(电压)定律等 4. 整理所得到的微分方程,将与输出有关的项放在方程 的左侧,与输入有关的项放在方程的右侧,各阶导数项 按降幂方式排列。 (n) ( n 1) 0 (t ) a0 x0 (t ) a x ( t ) a x (t ) a1 x 如: n 0 n 1 0
k2 (t ) k2 y(t ) cx (t ) c k 1 y 1
第二章 系统的数学模型
2. 电网络系统
2.2 系统的微分方程
遵循的定律:克希荷夫电流定律、克希荷夫电压定律
元素:电阻R、电感L、电容C 电阻元件: 电感元件: 电容元件:
UR U R iR R, iR R diL 1 UL L , iL U L dt dt L dU C 1 U C iC dt , iC C C dt
2. 了解非线性方程的线性化;
3. 熟悉拉氏变换及反变换、线性定常微分方程的解法;
4. 掌握传递函数基本概念及典型环节传递函数;
5. 掌握系统传递函数方框图的化简。 教学重点:微分方程建立、传递函数概念与求法、典
型环节传递函数、方框图等效变换
第二章 系统的数学模型
2.1 概 述
2.1 概 述
一、数学模型 1. 定义 定量地描述系统的动态性能,揭示系统的结构、参 数与动态性能之间关系的数学表达式。 2. 种类 微分方程、差分方程、统计学方程、传递函数、频 率特性、各种响应式等。 离散系统 连续系统 3. 研究领域 • 时间域——微分方程、差分方程、状态方程; • 复数域——传递函数、脉冲传递函数; • 频率域——频率特性。 连续系统 离散系统
质量元件: 阻尼元件:
弹性元件:
c
F ma m x
c—粘性阻尼系数 Fc cv cx
Fk kx
k—弹性系数
第二章 系统的数学模型
例2-1 列写下图所示机械系统的微分方程
2.2 系统的微分方程
解: 1)明确系统的输入与输出,
f (t) m c x (t)
图2-1
k
输入—f(t) , 输出—x(t)
言,若其中一个元件的存在,使另一元件在相同输 入下的输出受到影响,则有如前者对后者施加了负 载,这一影响就称为负载效应。 上例中,两个RC电路串联,存在着负载效应。
第1个RC回路:
第2个RC回路:
非线性微分方程的线性化 将一些非线性方程在一定的工作范围内用近似 的线性方程来代替,使之成为线性定常微分方程。
第二章 系统的数学模型
2.3 拉氏变换与拉氏反变换
2.3 拉普拉斯变换与拉普拉斯反变换
一、 拉氏变换的定义 若f(t)为实变数t的单值函数,且t<0时,f(t)=0;当t≥0 时,则函数f(t)的拉氏变换记作L[f(t)]或F(s),并定义为 st f ( t ) e dt L[f(t)]=F(s)= 0 (2.3.1) 式中,L—拉氏变换的符号; s—复变数,s=σ+jω(σ、ω均为实数); F(s)—是函数f(t)的拉氏变换,它是一个复变函数,通 常称F(s)为f(t)的象函数,而f(t)为F(s)的原函数;
第二章 系统的数学模型
2.2 系统的微分方程
例2-4 下图所示为一电网络系统,其输入为电压ui, 输出为电压uo,列写该系统微分方程。
解:根据克希荷夫电流定律,有 iL+ iR-iC = 0 u R ui u o iR ui R R 1 1 i u dt (ui uo )dt 又∵ L L L L duC duo iC C C dt dt 以上4个方程联立求解,并整理得,
L ui i R C uo
U 0
解:根据克希荷夫电压定律,有
di (t ) 1 (1) ui (t ) L Ri (t ) i (t )dt dt C duo (t ) (2) 1 uo (t ) i (t )dt i (t ) C C dt
将(2)代入(1)式,整理得, o (t ) RCu o (t ) uo (t ) RCu i (t ) LCu
( m 1) i (t ) b0 xi (t ) bm xi( m) (t ) bm1 x0 (t ) b1 x